T.-S. TSAY 91
Table 2. Gain/phase margins, phase/gain cr ossover frequen-
cies and rise times.
Method GM
Hz
cp
PM
(deg.)
Hz
cg
Rise Time
(sec)
Optimization 9.05 50.03 69.35 8.13 0.0202
Adaptive Gain 9.19 49.73 69.35 8.13 0.0124
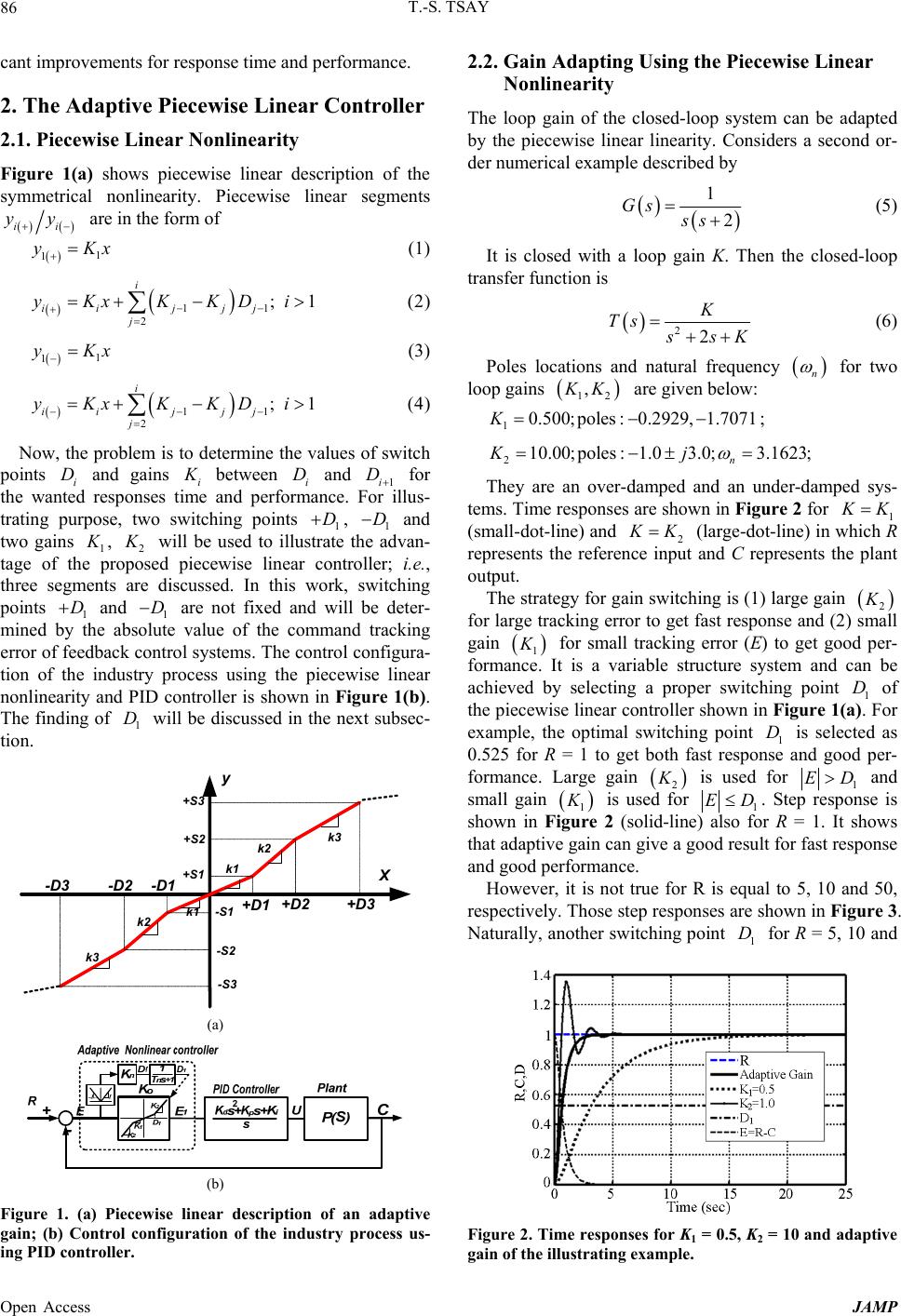
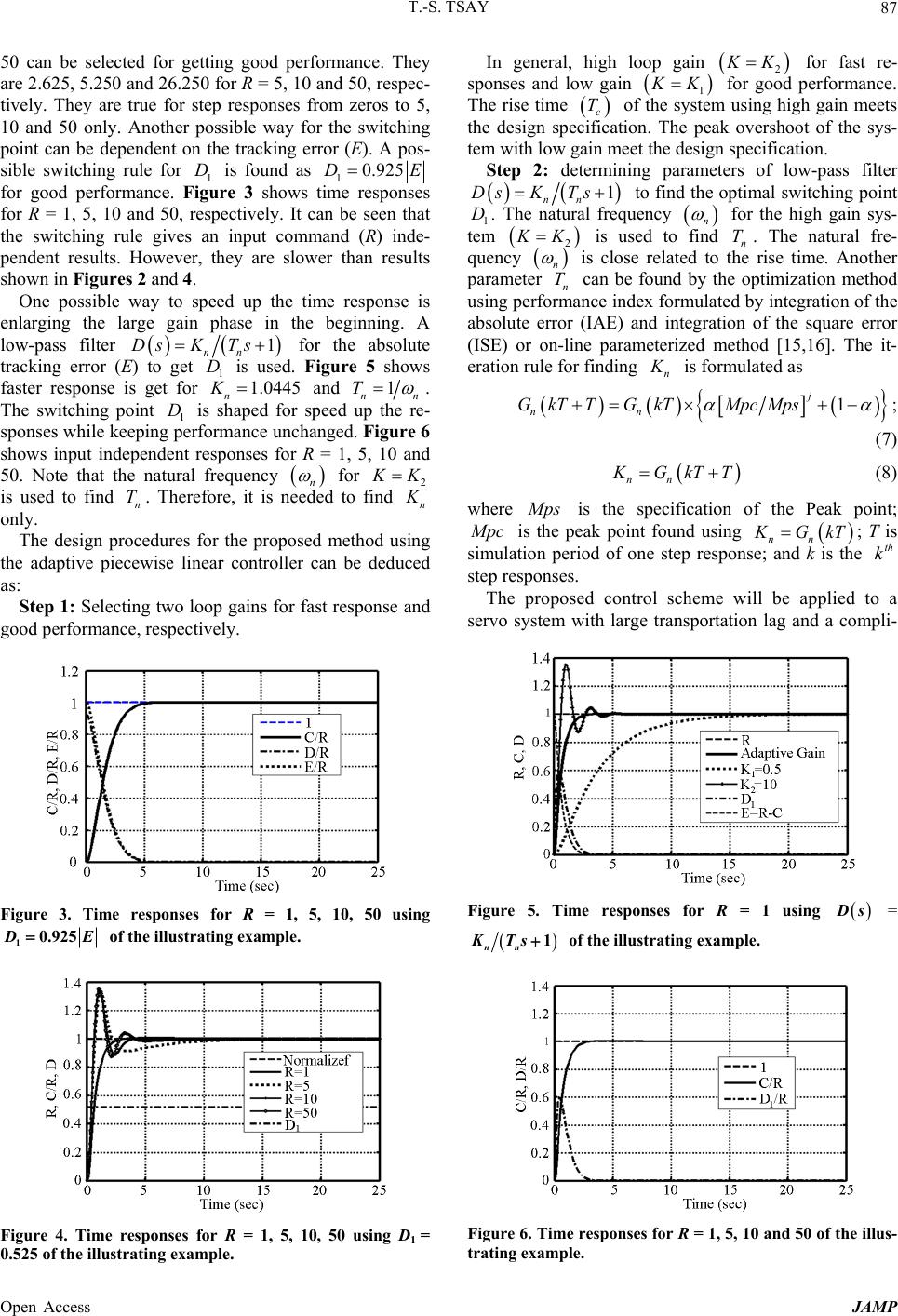
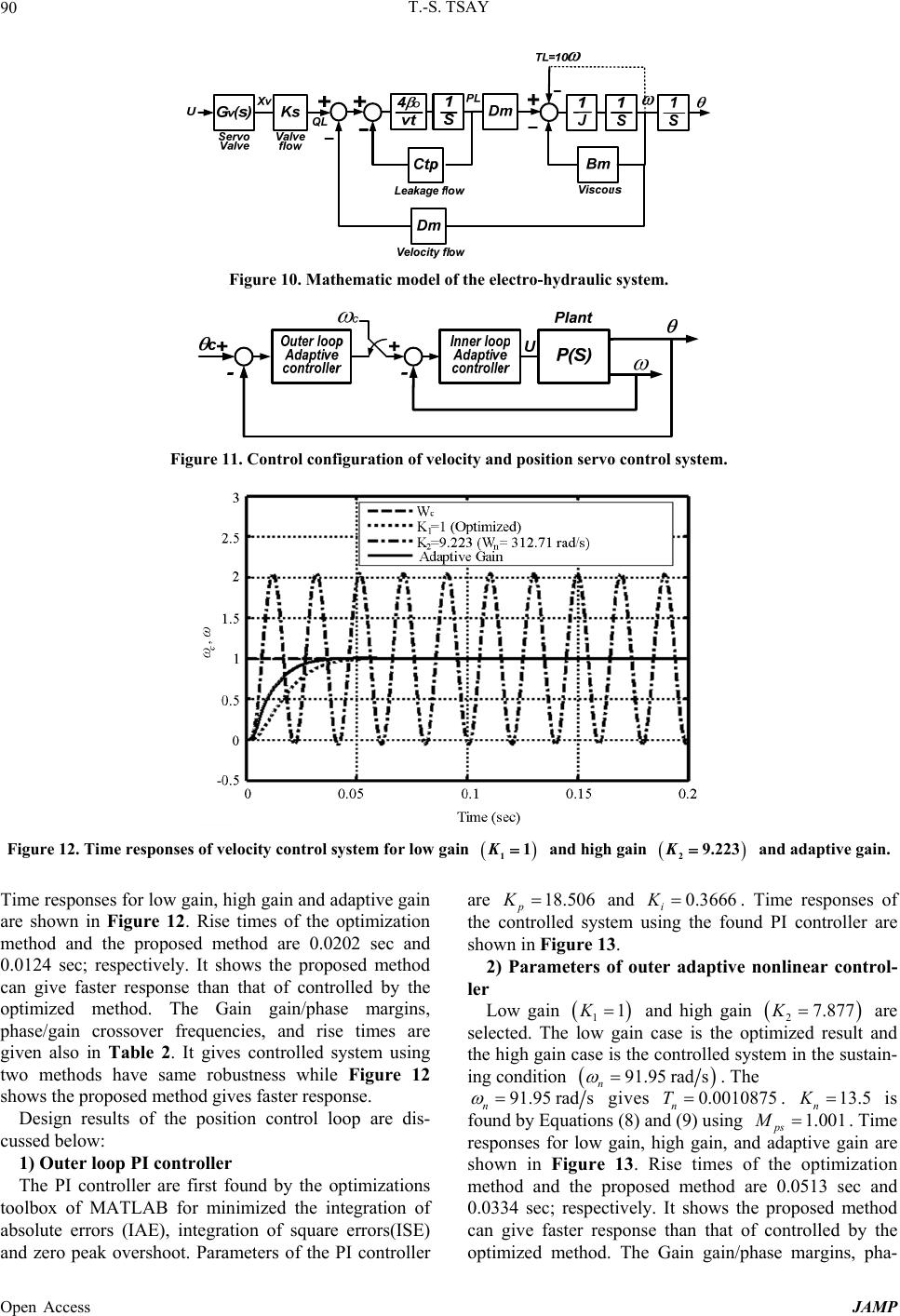
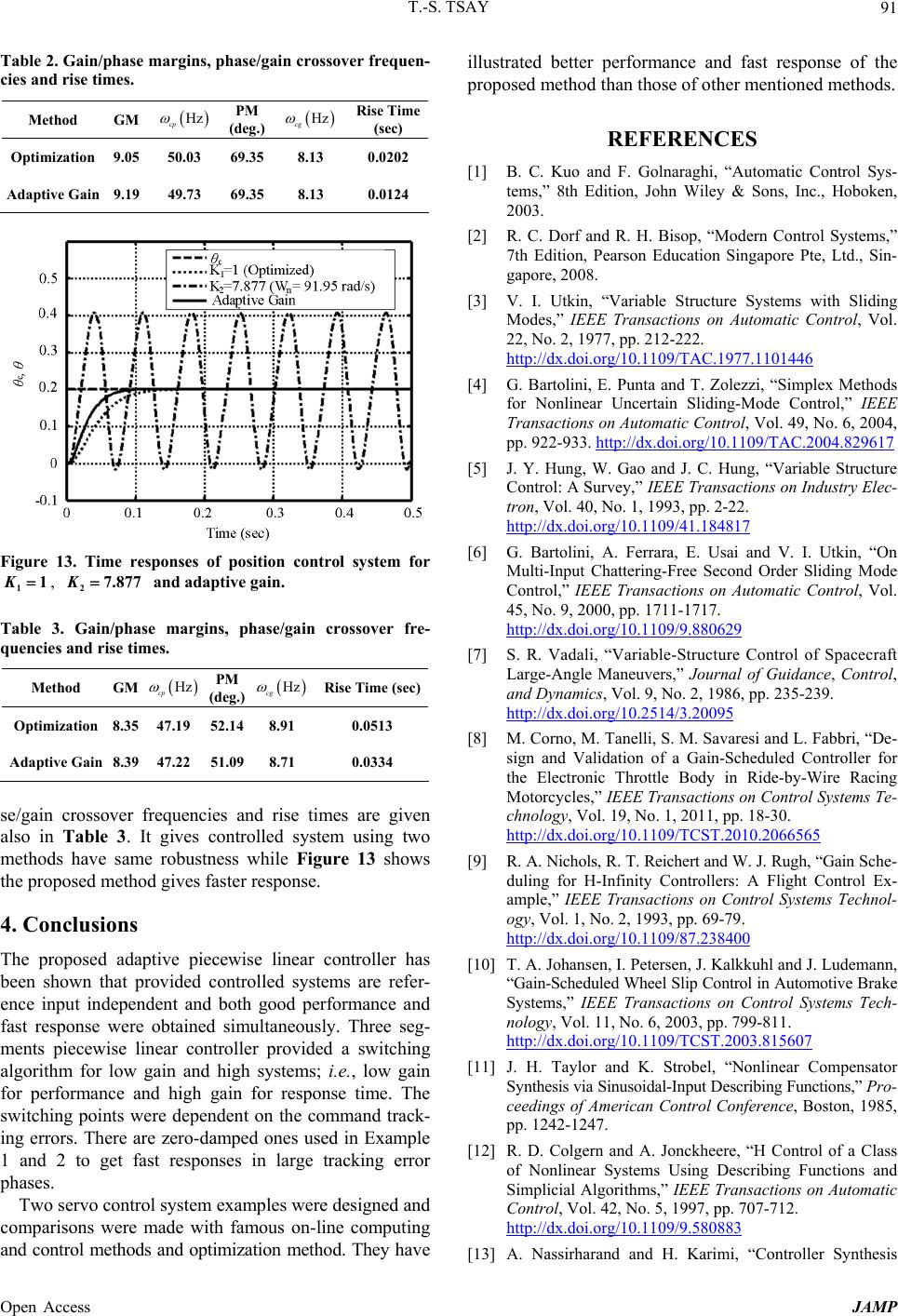
Figure 13. Time responses of position control system for
, and adaptive gain. K11K27.877
Table 3. Gain/phase margins, phase/gain crossover fre-
quencies and rise times.
Method GM
Hz
cp
PM
(deg.)
Hz
cg
Rise Time (sec)
Optimization 8.35 47.19 52.14 8.91 0.0513
Adaptive Gain 8.39 47.22 51.09 8.71 0.0334
se/gain crossover frequencies and rise times are given
also in Table 3. It gives controlled system using two
methods have same robustness while Figure 13 shows
the proposed method gives faster response.
4. Conclusions
The proposed adaptive piecewise linear controller has
been shown that provided controlled systems are refer-
ence input independent and both good performance and
fast response were obtained simultaneously. Three seg-
ments piecewise linear controller provided a switching
algorithm for low gain and high systems; i.e., low gain
for performance and high gain for response time. The
switching points were dependent on the command track-
ing errors. There are zero-damped ones used in Example
1 and 2 to get fast responses in large tracking error
phases.
Two servo control system examples were designed and
comparisons were made with famous on-line computing
and control methods and optimization method. They have
illustrated better performance and fast response of the
proposed method than those of other mentioned methods.
REFERENCES
[1] B. C. Kuo and F. Golnaraghi, “Automatic Control Sys-
tems,” 8th Edition, John Wiley & Sons, Inc., Hoboken,
2003.
[2] R. C. Dorf and R. H. Bisop, “Modern Control Systems,”
7th Edition, Pearson Education Singapore Pte, Ltd., Sin-
gapore, 2008.
[3] V. I. Utkin, “Variable Structure Systems with Sliding
Modes,” IEEE Transactions on Automatic Control, Vol.
22, No. 2, 1977, pp. 212-222.
http://dx.doi.org/10.1109/TAC.1977.1101446
[4] G. Bartolini, E. Punta and T. Zolezzi, “Simplex Methods
for Nonlinear Uncertain Sliding-Mode Control,” IEEE
Transactions on Automatic Control, Vol. 49, No. 6, 2004,
pp. 922-933. http://dx.doi.org/10.1109/TAC.2004.829617
[5] J. Y. Hung, W. Gao and J. C. Hung, “Variable Structure
Control: A Survey,” IEEE Transactions on Industry Elec-
tron, Vol. 40, No. 1, 1993, pp. 2-22.
http://dx.doi.org/10.1109/41.184817
[6] G. Bartolini, A. Ferrara, E. Usai and V. I. Utkin, “On
Multi-Input Chattering-Free Second Order Sliding Mode
Control,” IEEE Transactions on Automatic Control, Vol.
45, No. 9, 2000, pp. 1711-1717.
http://dx.doi.org/10.1109/9.880629
[7] S. R. Vadali, “Variable-Structure Control of Spacecraft
Large-Angle Maneuvers,” Journal of Guidance, Control,
and Dynamics, Vol. 9, No. 2, 1986, pp. 235-239.
http://dx.doi.org/10.2514/3.20095
[8] M. Corno, M. Tanelli, S. M. Savaresi and L. Fabbri, “De-
sign and Validation of a Gain-Scheduled Controller for
the Electronic Throttle Body in Ride-by-Wire Racing
Motorcycles,” IEEE Transactions on Control Systems Te-
chnology, Vol. 19, No. 1, 2011, pp. 18-30.
http://dx.doi.org/10.1109/TCST.2010.2066565
[9] R. A. Nichols, R. T. Reichert and W. J. Rugh, “Gain Sche-
duling for H-Infinity Controllers: A Flight Control Ex-
ample,” IEEE Transactions on Control Systems Technol-
ogy, Vol. 1, No. 2, 1993, pp. 69-79.
http://dx.doi.org/10.1109/87.238400
[10] T. A. Johansen, I. Petersen, J. Kalkkuhl and J. Ludemann,
“Gain-Scheduled Wheel Slip Control in Automotive Brake
Systems,” IEEE Transactions on Control Systems Tech-
nology, Vol. 11, No. 6, 2003, pp. 799-811.
http://dx.doi.org/10.1109/TCST.2003.815607
[11] J. H. Taylor and K. Strobel, “Nonlinear Compensator
Synthesis via Sinusoidal-Input Describing Functions,” Pro-
ceedings of American Control Conference, Boston, 1985,
pp. 1242-1247.
[12] R. D. Colgern and A. Jonckheere, “H Control of a Class
of Nonlinear Systems Using Describing Functions and
Simplicial Algorithms,” IEEE Transactions on Automatic
Control, Vol. 42, No. 5, 1997, pp. 707-712.
http://dx.doi.org/10.1109/9.580883
[13] A. Nassirharand and H. Karimi, “Controller Synthesis
Open Access JAMP