J. F. LI ET AL.
Copyright © 2013 SciRes. CN
279
[7] Z. Quan, S. Cui, H. Poor and A. Sayed, “Collaborative
Wideband Sensing for Cognitive Radios,” Signal Proc-
essing Magazine, IEEE, Vol. 25, No. 6, 2008, pp. 60-73.
doi:10.1109/MSP.2008.929296
-5 -4 -3-2-10 1 2345
0.4
0.5
0.6
0.7
0.8
0.9
1
Average SNR/dB
Dete c tion Proba b ilit y
OR-rule-b ased Col l aborati ve Energy Detecti on
AND-rul e-b ased Coll aborati ve Energy Detecti on
Diffusi on-based Collab orati ve Ene rgy Detecti on
[8] R. Chen, J. M. Park and K. Bian, “Robust Distributed
Spectrum Sensing in Cognitive Radio Networks,” The
27th Conference on Computer Communications. IEEE.
2008, pp. 1876-1884.
[9] S. M. Mishra, A. Sahai and R. W. Brodensen, “Coopera-
tive Sensing Among Cognitive Radios,” in Proc. IEEE
International Conference on Communications (ICC),
2006, pp. 1658-1663.
[10] C. Sun, W. Zhang and K. Ben, “Cluster-based Coopera-
tive Spectrum Sensing in Cognitive Radio Systems,”
Communications, 2007. ICC'07. IEEE International
Conference on. IEEE, 2007, pp. 2511-2515.
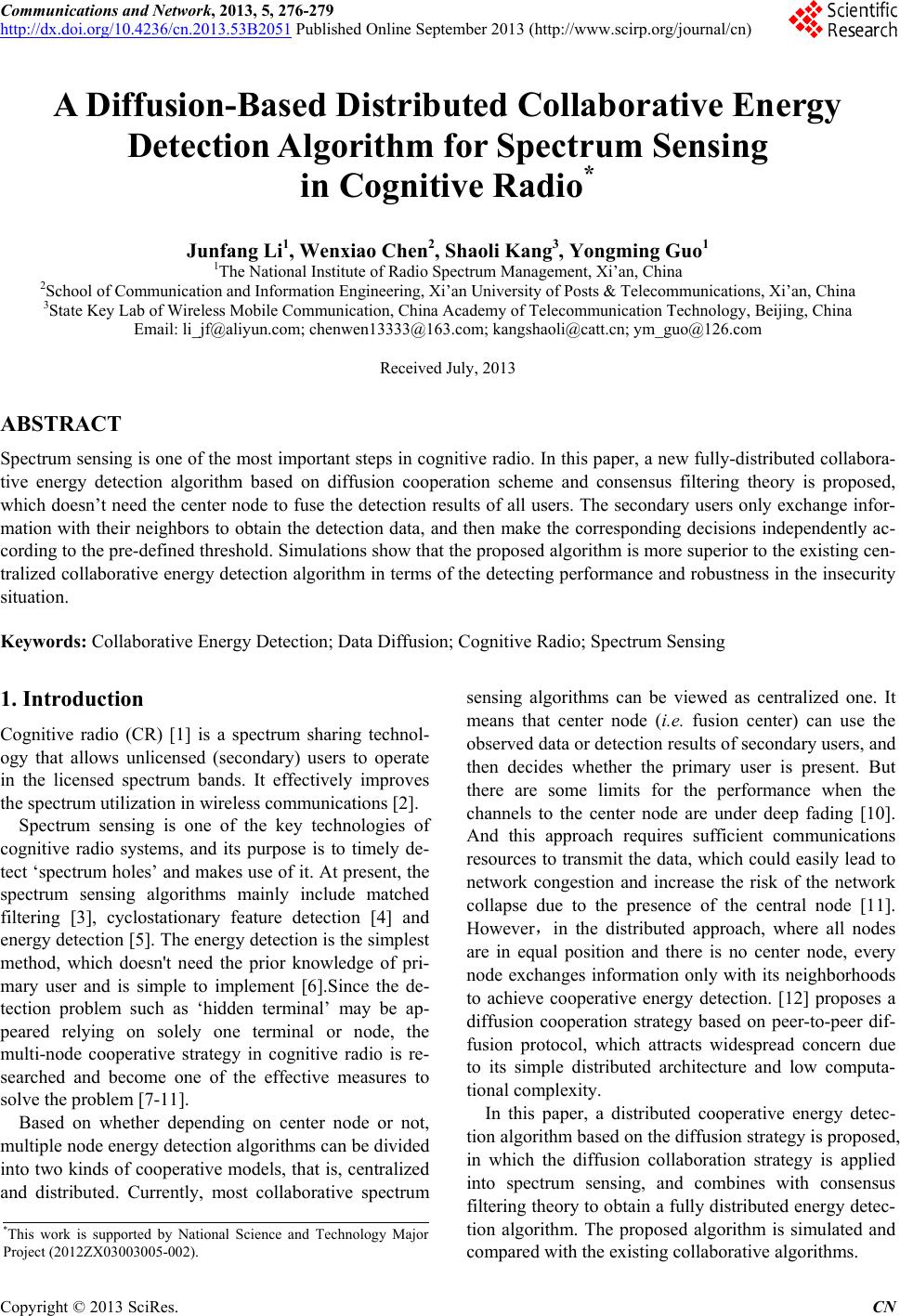
Figure 5. Detection performance comparison for n=10.
as the average SNR is -4 dB, the performance of detec-
tion probability improves to about 45% and 90%, respec-
tively.
[11] G.Y Lu, Y. X. Wang, K. Xie and X. N. Yong, “Novel
Spectrum Sensing Method Based on the Spatial Spectrum
for Cognitive Radio Systems,” Journal of Electronics,
Vol. 27, No. 5, 2010, pp. 625-629.
doi:10.1007/s11767-011-0483-2
5. Conclusions
In this paper, we have proposed a novel fully-distributed
collaborative spectrum sensing algorithm in cognitive
radios, in which every node exchanges information only
with its neighbors and then makes the corresponding
decision independently without fusion center. Simulation
results demonstrate the validity of the proposed scheme,
and show that it is more superior to the existing collabo-
rative energy detection algorithms in terms of the detect-
ing performance and robustness.
[12] C. G. Lopes and A. H. Sayed, “Diffusion Least-mean
Squares Over Adaptive Networks: Formulation and Per-
formance Analysis,” Signal Processing, IEEE Transac-
tions on, Vol. 56, No. 7, 2008, pp. 3122-3136.
doi:10.1109/TSP.2008.917383
[13] F. F. Digham, M. S. Alouini and M. K. Simon, “On the
Energy Detection of Unknown Signals over Fading Chan-
nels,” Communications, IEEE Transactions on, Vol. 55,
No. 1, 2007, pp. 21-24.
doi:10.1109/TCOMM.2006.887483
[14] V. I. Kostylev, “Energy Detection of a Signal with Ran-
dom Amplitude,” Communications, 2002. ICC 2002.
IEEE International Conference on. IEEE, Vol. 3, 2002,
pp. 1606-1610.
REFERENCES
[1] I. Mitola and J. G. Q Maguire, “Cognitive Radio: Making
Software Radios More Personal,” IEEE Personal Com-
munications, Vol. 6, No. 4, 1999, pp. 13-18.
doi:10.1109/98.788210
[15] X. K. Wang, G. Y. Lu, Z. Q. Bao and H. Bai, “A Novel
Distributed Cooperative Energy Detection Algorithm,”
Telecommunication Engineering, Vol. 52, No. 9, 2012, pp.
1480-1485.
[2] J. Mitola, “Cognitive Radio: An Integrated Agent Archi-
tecture for Software Defined Radio,” Doctor of Technol-
ogy, Royal Inst. Technology (KTH), Stockholm, Sweden,
2000, pp. 271-350.
[16] L. Xiao and S. Boyd, “Fast Linear Iterations for Distrib-
uted Averaging,” Systems & Control Letters, Vol. 53, No.
1, 2004, pp. 65-78. doi:10.1016/j.sysconle.2004.02.022
[3] D. Cabric, S. M. Mishra and R.W. Brodersen, “Imple-
mentation Issues in Spectrum Sensing for Cognitive Ra-
dios,” Signals, Systems and Computers, 2004. Conference
Record of the Thirty-eighth Asilomar Conference on.
IEEE, 2004, pp. 772-776.
[17] R. S. Olfati and R. M. Murray, “Consensus Problems in
Networks of Agents with Switching Topology and
Time-delays,” Automatic Control, IEEE Transactions on,
Vol. 49, No. 9, 2004, pp. 1520-1533.
doi:10.1109/TAC.2004.834113
[4] C. Sun, W. Zhang and K. Ben, “Cluster-based Coopera-
tive Spectrum Sensing in Cognitive Radio Systems,”
Communications, 2007. ICC'07. IEEE International Con-
ference on, 2007, pp. 2511-2515.
[18] A. Jadbabaie, J. Lin and A. S. Morse, “Coordination of
Groups of Mobile Autonomous Agents Using Nearest
Neighbor Rules,” Automatic Control, IEEE Transactions
on, Vol. 48, No. 6, 2003, pp. 988-1001.
doi:10.1109/TAC.2003.812781
[5] U. Harry. “Energy Detection of Unknown Deterministic
Signals,” Proceedings of the IEEE, Vol. 55, No. 4, 1967,
pp. 523-531. doi:10.1109/PROC.1967.5573 [19] Z. Q. Li, F. Rchard and M. Y. Huang, “Distributed
Spectrum Sensing in Cognitive Radio Networks,”
Wireless Communications and Networking Confer-
ence, IEEE, 5-8, 2009, pp. 1-5.
[6] N. Hoven, R. Tandra and A. Sahai, “Some Fundamental
Limits on Cognitive Radio,” Wireless Foundations EECS,
Univ. of California, Berkeley, 2005.