Energy and Power Engineering, 2013, 5, 833-837
doi:10.4236/epe.2013.54B160 Published Online July 2013 (http://www.scirp.org/journal/epe)
Simulation of Fault Arc Using Conventional Arc Models
Ling Yuan, Lin Sun, Huaren Wu
School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing, China
Email: 870599996@qq.com
Received April, 2013
ABSTRACT
Conventional arc models are usually used to research the interaction between switching arc and circuit. It is important to
simulate the fault arc for arc flash calculations, choice of electrical equipments and power system protection. This paper
investigates several conventional arc models for calculating the fault arcing current. Simulation results show that con-
ventional arc models can be used to simulate the fault arc if the parameters of arc models are given properly. This paper
provides the parameters of 5 popular arc models and describes the simulation results of the fault arc.
Keywords: Arc; Arc Flash; Arc Model; Plasma; Power System
1. Introduction
Short circuit in power systems is serious fault. The short
circuit current must be calculated for the choice of elec-
trical equipments and the setting of power system protec-
tion. An arc presents usually at the fault location in pow-
er systems. The fault arc could destroy electrical equip-
ment and threaten human life. It is important to calculate
the arc fault current for reducing loss.
An arc model must be used for calculation of the arc
fault current. There are a lot of arc models for describing
the arc. Arc models can be classified in three groups:
physical models, black box models and models based on
graphics and diagrams. Black box models describe only
the relation between input and output signals. Black box
models define the interaction between the arc and the
electrical circuit during the fault. In black box models,
the arc is described by one differential equation or sev-
eral differential equations relating the arc conductance
which describes the energy balance of the arc column.
Cassie arc model was presented by Cassie in 1939 [1].
Cassie assumed that the arc has a fixed temperature being
cooled by forced convection. This implies that the
cross-section area of the arc is proportional to the current
and that the voltage over the arc is constant. Cassie arc
model is suitable for arcs with high currents.
Mayr arc model was introduced in 1943 [2, 3]. Mayr
assumed that power losses are caused by thermal con-
duction and the arc conductance is dependent on tem-
perature. The cross-section area of the arc is assumed
constant. Mayr arc model is fit for currents near zero.
Schwarz developed a modified Mayr arc model in
1971[4]. The time constant and the cooling power in the
model are dependent on the arc conductance [5].
Habedank arc model is a series connection of a Cassie
and Mayr arc model [6]. It is suitable for arcs with high
currents and for currents near zero.
A modified Mayr arc model was presented in 1992 [7].
The cooling power in the model is current-dependent.
Schavemaker arc model is also a modified Mayr arc
model with a constant time parameter [8]. The cooling
power in the model is a function of the electrical power
input.
The above-mentioned arc models are black box mod-
els, that is, conventional arc models. They are usually
used to research the interaction between switching arc
and circuit during the interruption process of circuit
breakers. The characteristics of the fault arc are different
from that of the switching arc. This paper describes the
simulation methods of the fault arc using conventional
arc models. First of all the arcing fault was tested in the
high-power test laboratory and the arc voltage and the arc
current are depicted. Then 5 arc models are investigated
and their parameters are determined for simulation of the
fault arc. Conventional arc models can be used to simu-
late the fault arc.
2. Simulation of Fault Arc
Short circuit was tested in the high-power test laboratory.
The simplified laboratory test circuit is shown in Figure
1. The supply voltage is 400V.
The arc was initiated by means of a fuse wire between
2 electrodes. The arc voltage and the arc current were
recorded with the sampling frequency of 40 kHz and are
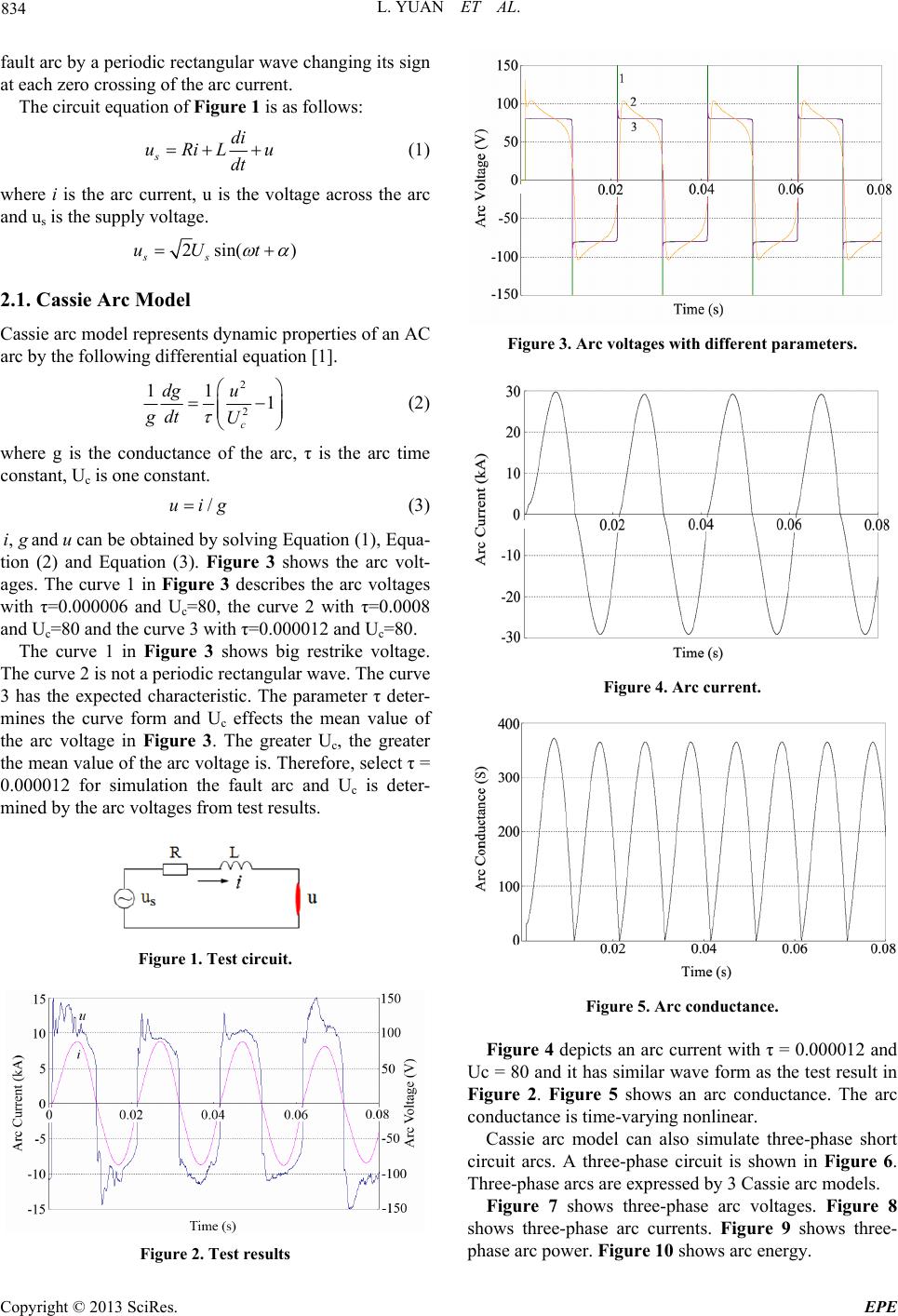
depicted in Figure 2. Figure 2 shows that arc voltage
and arc current are in phase and the arc is resistive. The
arc voltage ought to be represented for simulation the
Copyright © 2013 SciRes. EPE