 Applied Mathematics, 2013, 4, 7-12 Published Online November 2013 (http://www.scirp.org/journal/am) http://dx.doi.org/10.4236/am.2013.411A2002 Open Access AM Chaos Synchronization of Uncertain Lorenz System via Single State Variable Feedback Fengxiang Chen1,2*, Tong Zhang1,2 1School of Automotive Studies, Tongji University, Shanghai, China 2Clean Energy Automotive Engineering Center, Tongji University, Shanghai, China Email: *Fxchen_qjy@hotmail.com Received May 6, 2013; revised June 6, 2013; accepted June 13, 2013 Copyright © 2013 Fengxiang Chen, Tong Zhang. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT This paper treats the problem of chaos synchronization for uncertain Lorenz system via single state variable information of the master system. By the Lyapunov stability theo ry and adaptive technique, the derived contro ller is featured as fol- lows: 1) only single state variable information of the master system is needed; 2) chaos synchronization can also be achieved even if the perturbation occurs in some parameters of the master chaotic system. Finally, the effectiveness of the proposed co ntrollers is also illustrated by the simulations as well as rigorous mathematical proofs. Keywords: Uncertain Lorenz System; Single State Variable; Chaos Synchronization 1. Introduction Chaos control and synchronization have been intensively investigated during last decade [1-3] and still have at- tracted increasing attention in recent years. Chaos syn- chronization has many potential applications in secure communication [1], laser physics, chemical reactor proc- ess [2], biomedicine and so on. Up to now, numerous methods have been proposed to cope with the chaos syn chron izat ion, su ch as backstepping design method [3 ], adaptive design method [4], impulsive control method [5], sliding mode control method [6,7], and other control methods [8-10]. But most of the proposed methods abovementioned need more single state variable informa- tion of the master system. However, for instance, the more state variables transmitted to the slave system means the more bandwidth and energy consumption in secure communication system as well as security reduc- tion. Additionally, controller based on single state vari- able is simple, efficient and easy to be implemented in practical applications [11]. For example, in a real engi- neering case, some state variables may be difficult or even cannot be detected. Recently, scholars begin to have attention on the prob- lem of chaos synchronization via single state variable controller (hereafter refereed to as “SSVC”) with the motivation of the above facts. Jiang Zhang [12] gives a schematic method to design the synchronization control- ler for a class of chaos system based on backstepping design, and several elegant results derived. However, the controllers conceived by several high-degree complex polynomials. M. T. Yassen [11] provided linear SSVC to Lu chaotic system, but the gain of the controller is diffi- cult to be determined due to the fact that it contains the information of the upper bound of the system trajectory. In order to overcome the deficiency, he modified the SSVC based on adaptive technique. Junan Lu [13] gave out an adaptive SSVC for an unified chaotic system (uni- fication of Lorenz, Chen and Lu chaotic system). Feng- xiang Chen [14] proposes a linear SSVC for Lu system via theory of cascade-connection system. However, lit- eratures [11-14] did not take the parameters uncertainty into account, and the synchronization failed when some uncertainty occurs. On the other hand, for an electrical or electronic system, parameter uncertainty is inevitably suffered due to the variation of temperature, humidity, voltage, or interference of electric and magnetic fields. Thus, in this pap er, we will provide robust SSVC for un- certain Lorenz chaotic system based on Lyapunov stabil- ity theory, and its effectness is validated by both rigorous theoretical analysis and simulations. The rest of this paper is organized as follows. In the next section, the problem statement on the scheme of master-slave chaos synchronization for uncertain Lorenz system via single state variable information is presented. *Corresponding author.  F. X. CHEN, T. ZHANG 8 In Section 3, three controllers are provided to the Lorenz system without/with parameters perturbation. In Section 4, numerical simulations are provided to illustrate the effectiveness of the proposed controllers. Finally, some conclusion remarks are included in Section 5. 2. Problem Formulation The Lorenz system is a system of ordinary differential equations (the Lorenz equations defined by (1)) first studied by Edward Lorenz [15]. It is notable for having chaotic solutions for certain parameter values and initial conditions. In particular, the Lorenz attractor is a set of chaotic solution s of the Lorenz system. Consider the Lo- renz system: 121 2121 312 3 xxx 3 rxxx x xxxbx (1) where ,,rb are system parameters, 123 ,, xx are state variables, the system generates the chaotic behavior (see Figure 1) when 10,28,8 3rb . Hereafter in this paper, we refer to the system (1) as master system and assume that 1 is the only available state variable. The related slave system with control inputs are writ- ten as 10211 2012132 312033 ˆˆˆ ˆˆˆˆˆ ˆˆˆˆ xxxu rx xxx u xxxbxu (2) where 000 ,,rb are system nominal parameters and 12 ˆˆ ,, 3 ˆ x uD x4 :RR are state variables, i.e. i, and they will be work out later. 1123 ˆˆˆ ,,, , ii uuxxxx ,3,i1,2 tion Our target is to find out the func1,2,3 i,ui such that the trajectory of th e slave system (2) is going to asymptotically approach the master system (1) and fi- nally implement chaos synchronization in the sense that -20 -10 010 20 -50 0 50 0 10 20 30 40 50 x 1 x 2 x 3 Figure 1. Lorenz chaos phenomenon at 10, 28,r 83b. lim0, 1,2,3 i tei where . ˆ ii exx i 3. Controller Design According to the parameter uncertainties, we can classify the synchronization system into 8 cases listed in Table 1. If we introduce the set ,, BC defined as following: 00 0000 ,,,, ,,, rbr brr bb 00 0000 ,,,, ,,,Brbrb rrbb 22 00 000 ,,,, ,0Crbrbrrbb Obviously, it is an equivalent partition for the element from case 1 to case 8. i.e., , case 1Acase 2B , 3i . Consequently, in this section, we are only going to investigate the chaos synchronization under three different classifications defined by the set 8caseCi ,, BC. C1: 00 0 ,,,, ,rbr bA Theorem 1: The two Lorenz chaotic systems (1) and (2) can be synchronized under the control law as follows: 1 201011313 31212 0 ˆˆˆ ˆ ˆˆˆ u urxrxxxxx uxxxx (3) Proof: Subtracting Equation (1) from Equation (2), then the error dynamic system is obtained as 1021 2213 31203 ee eexe exebe e (4) Choosing the Lyapunov function as 222 123 0 122 2 e Ve e 2 (5) and taking the derivative along the trajectory of the sys- tem (4), it yields 22 1 12212312303 22 2 121203 22 2 2 220 Veeeexeexeebe eeeebe (6) The proof is completed. C2: 00 0 ,,,, ,rbr bB For this case, the system (1) can be equivalent to the perturbation system as Table 1. Synchronization system classification based on parameter uncertainties. Case 1Case 2Case 3Case 4Case 5 Case 6 Case 7Case 8 0 0 0 rr bb 0 0 0 rr bb 0 0 0 rr bb 0 0 0 rr bb 0 0 0 rr bb 0 0 0 rr bb 0 0 0 rr bb 0 0 0 rr bb Open Access AM  F. X. CHEN, T. ZHANG Open Access AM 9 1 1021 201213 31203 xxx rx xxx xxxbx 1 (7) where . 0h Proof: Subtracting Equation (1) from Equation (2), then the error dynamic system is obtained as 10211 11 2213 31203 eee e eexe exebe where 102 x . e (9) Since the trajectory of the master system (1) is bounded due to the property of chaos system, 1 must be bounded, i.e. 11 1 ,..Rst M . Choosing the Lyapunov function as Theorem 2: The two Lorenz chaotic systems (1) and (2) can be synchronized under the control law as follows: 22 22 * 123 00 11 22 22 e Vee h (10) 11111 201011313 31212 11 ˆˆ ˆˆˆ ˆ ˆˆˆ ˆ uxxxx urxrxxxxx uxxxx hx x (8) where * is a constant and will be determined later. Taking the derivative along the trajectory of the system (4), it yields * 1 22 2 11 112 2123 123 0300 0 *1 11 1 222 1203 00 0 * 11 1 222 1203 00 22 2 2 132 22 132 22 e e Veeeexeexeebe h e ee eebe ee eebe (11) If we se lect *1 , then . 0V Theorem 3: The two Lorenz chaotic systems (1) and (2) can be synchronized under the control law as follows: Comment 1: Since the controller input component 11 ee (see Equation (8)) is not continuous at 10e , it leads to chattering in the viewpo int of engineering appli- cation. In order to overcome this defect, a continuous function 1 2arctanke is adopted to substitute the discontinuity function 11 ee based on the conception of variable structure controller design theory, and thus the chattering will be eliminated. 10 11 201011313 31212 ˆ ˆˆˆ ˆ ˆˆˆ uMxx urxrxxxxx uxxxx (14) where 2 112 11 0223 212 3 MM M , 12 10 Proof: Subtracting Equation (1) from Equation (2), then the error dynamic syste m is ob tained as 0,1 2,0,32,0,2.b C3: 00 0 ,,,, ,rbr bC In this case, the system (1) can be equivalent to the perturbation system as 1021 1 22132 312033 eee M eexe exebe 1 e (15) 1021 1 201213 2 312033 xxx xrxxxx xxxbx (12) Choosing the Lyapunov function as where 222 123 0 122 2 e Ve e (16) 102 201 203 1 x rrx bbx (13) and taking the derivative along the trajectory of the sys- tem (4), it yields 22 2 1 12212312303 1102 233 22 2 2 2222 VeeeexeexeebeM eee (17) Since the trajectory of the master system (1) is bounded, i must be bounded, i.e. , i R .. ii tM . Additionally, if 0 , 0, rr0 bb then , , and respectively. 10 20 3 0Note that , for any , thus 21 2ab ab 2,,RabR 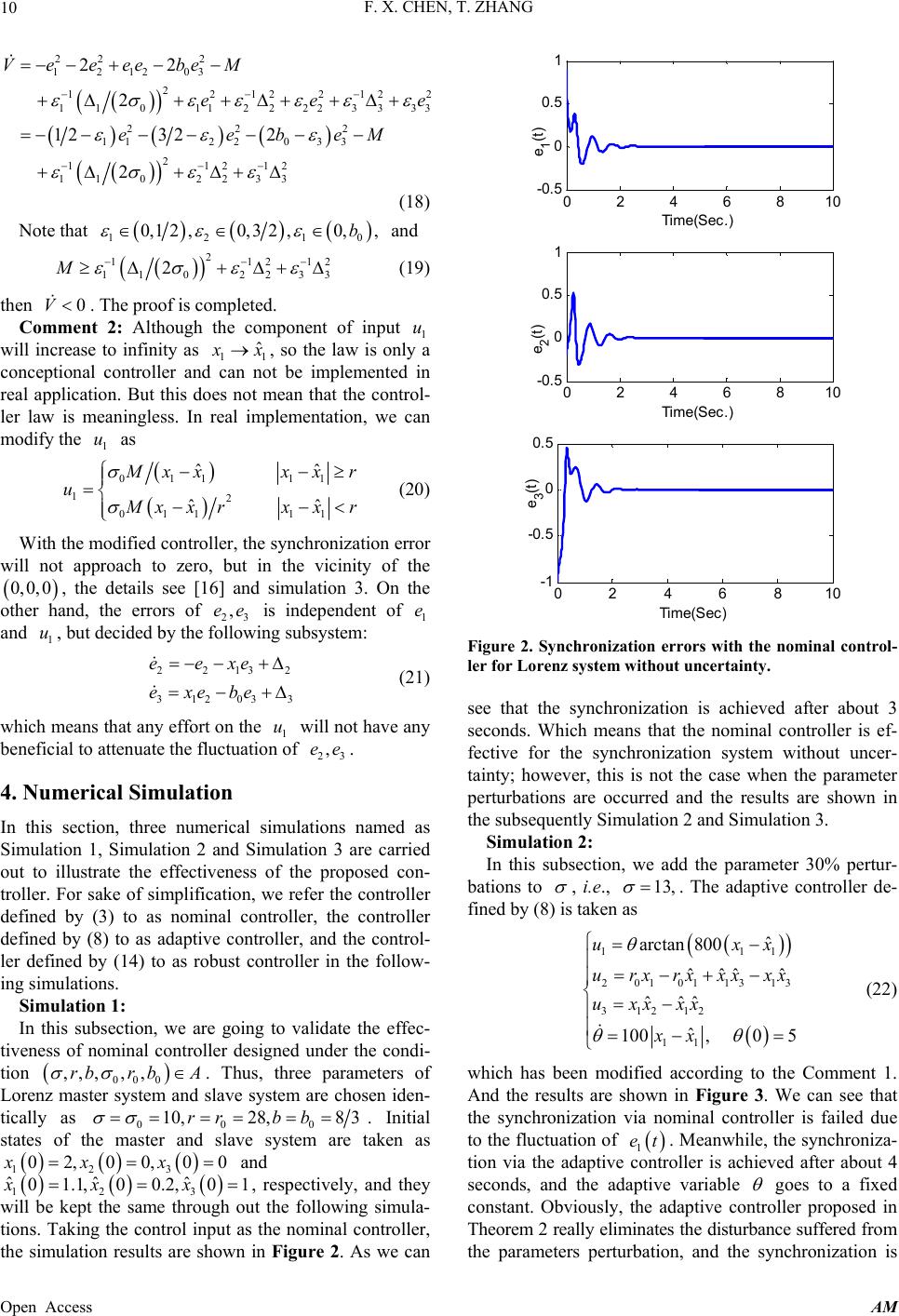 F. X. CHEN, T. ZHANG 10 22 2 121203 2 121221 11 01122223333 222 112 2033 2 11212 11 02233 22 2 12 322 2 VeeeebeM ee eebeM 22 e (18) Note that 12 1 0,1 2,0,3 2,0,,b 0 and 2 112 11 0223 2M 12 3 (19) then . The proof is completed. 0V Comment 2: Although the component of input 1 will increase to infinity as 11 u ˆ x, so the law is only a conceptional controller and can not be implemented in real application. But this does not mean that the control- ler law is meaningless. In real implementation, we can modify the as 1 u 011 11 12 011 11 ˆˆ ˆˆ xxxx r u xxrxxr 2 3 (20) With the modified controller, the synchronization error will not approach to zero, but in the vicinity of the , the details see [16] and simulation 3. On the other hand, the errors of 23 is independent of and , but decided by the following subsystem: 0,0,0 1 u,ee 1 e 2213 31203 eexe exebe (21) which means that an y effor t on the 1 will not have any beneficial to attenuate the fluctuation of . u 23 ,ee 4. Numerical Simulation In this section, three numerical simulations named as Simulation 1, Simulation 2 and Simulation 3 are carried out to illustrate the effectiveness of the proposed con- troller. For sake of simplification, we refer the controller defined by (3) to as nominal controller, the controller defined by (8) to as adaptive controller, and the control- ler defined by (14) to as robust controller in the follow- ing sim ul a ti on s. Simulation 1: In this subsection, we are going to validate the effec- tiveness of nominal controller designed under the condi- tion . Thus, three parameters of Lorenz master system and slave system are chosen iden- tically as 00 0 ,,,,,rbr bA 00 0 10,28,8 3rr bb 123 02,00,0xxx ˆˆ ˆ 01.1,00.2,xx . Initial states of the master and slave system are taken as and 0 0x 12 3 , respectively, and they will be kept the same through out the following simula- tions. Taking the control input as the nominal controller, the simulation results are shown in Figure 2. As we can 1 0246810 -0. 5 0 0. 5 1 Time(Sec.) e 1 (t) 0246810 -0. 5 0 0. 5 1 Time(Sec.) e 2 (t) 0 246810 -1 -0. 5 0 0. 5 Time(Sec) e 3 (t ) Figure 2. Synchronization errors with the nominal control- ler for Lorenz system without uncertainty. see that the synchronization is achieved after about 3 seconds. Which means that the nominal controller is ef- fective for the synchronization system without uncer- tainty; however, this is not the case when the parameter perturbations are occurred and the results are shown in the subsequently Simulation 2 and Simulation 3. Simulation 2: In this subsection, we add the parameter 30% pertur- bations to , i.e., 13, . The adaptive controller de- fined by (8) is taken as 11 201011313 31212 11 ˆ arctan 800 ˆˆˆ ˆ ˆˆˆ ˆ 100,0 5 ux urxrxxxxx uxxxx xx 1 x (22) which has been modified according to the Comment 1. And the results are shown in Figure 3. We can see that the synchronization via nominal controller is failed due to the fluctuation of 1 et. Meanwhile, the synchroniza- tion via the adaptive controller is achieved after about 4 seconds, and the adaptive variable goes to a fixed constant. Obviously, the adaptive controller proposed in Theorem 2 really eliminates the disturbance suffered fro m he parameters perturbation, and the synchronization is t Open Access AM 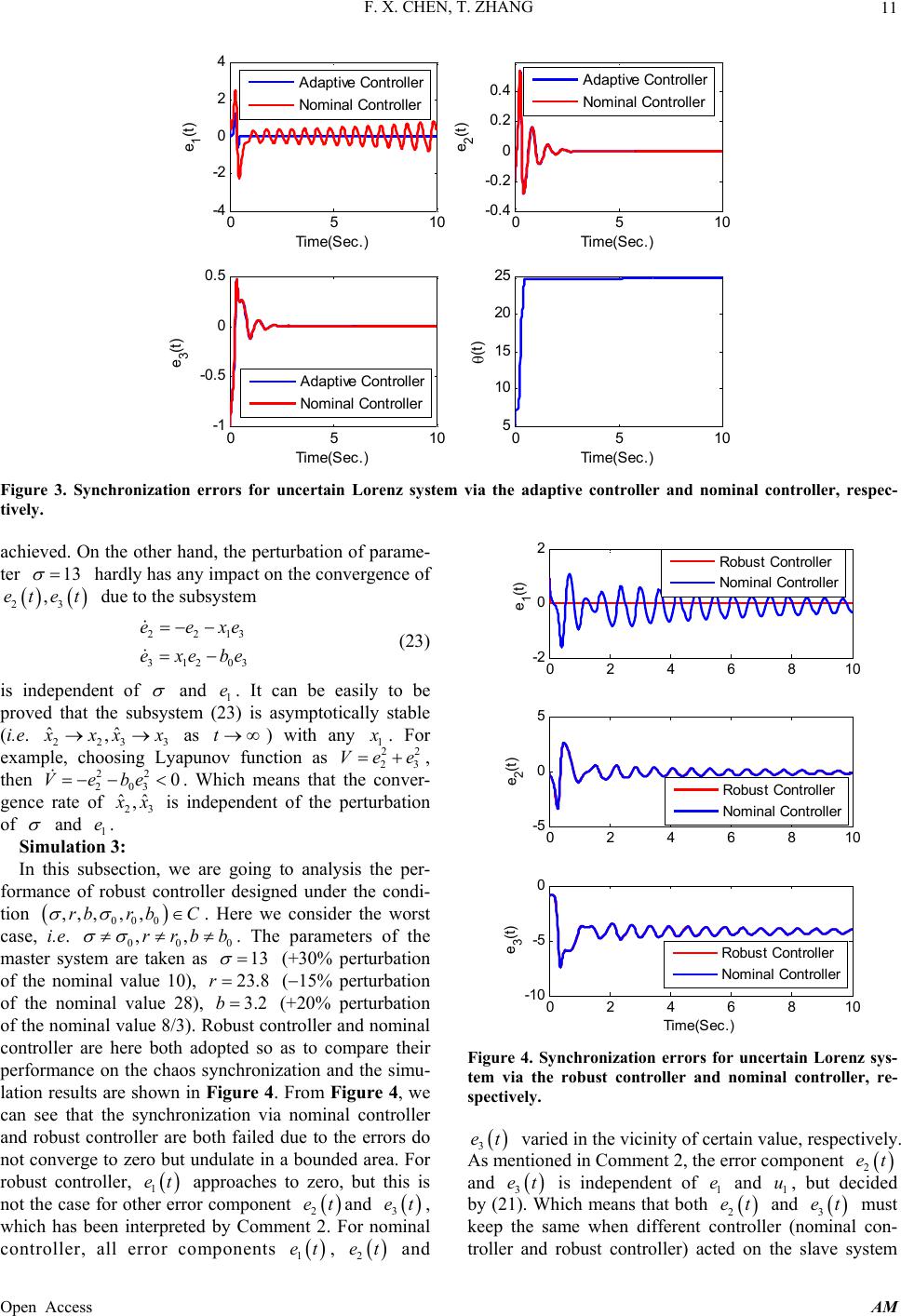 F. X. CHEN, T. ZHANG Open Access AM 11 05 10 -4 -2 0 2 4 e 1 (t) Time(Sec.) 05 10 -0.4 -0.2 0 0. 2 0. 4 e 2 (t) Time(Sec.) 05 10 -1 -0. 5 0 0. 5 e 3 (t) Time(Sec.) 05 10 5 10 15 20 25 (t) Time(Sec.) A dapti ve Cont roll er Nomi nal Control l er A dapti ve Cont roll er Nomi nal Cont rol l er A dapti ve Cont roll er Nomi nal Cont rol l er Figure 3. Synchronization errors for uncertain Lorenz system via the adaptive controller and nominal controller, respec- tively. r achieved. On the other hand, the perturbation of parame- 0246810 -2 2 te 13 hardly has any impact on the convergence of 3 (23) is independent of 23 ,etet due to the subsystem 2213 eexe exebe 31 20 and proved that the subystem3) is asymptotically stable 1 e. (2It can be easily to be s (i.e. 2233 ˆˆ , xx as t) with any 1 x . For example, choosing Lyapunov function as 22 23 Vee , then . Weans that the nver- gence rate of 23 ˆˆ , 2 20 Veb 2 3 0ehich mco x is independent of the p of e bationrtur and 1 e. : Simulation 3 Ithis susecn btion, we are going to analysis the per- fost controller designed under the condi- tio rmance of robu n 00 0 ,,,, ,rbr bC . Here we consider the worst case, i.e. 00 0 ,,rrbb . The parameters of the maste 13 r system are taken as (+30% perturbation of the nom23.8 inal value 10), r (15% perturbation of the nominal value 28), 3.2b (+20% perturbation of the nominal value 8/3). Rntroller and nominal controller are here both ado as to compare their performance on the chaos synchronization and the simu- lation results are shown in Figure 4. From Figure 4, we can see that the synchronization via nominal controller and robust controller are both failed due to the errors do not converge to zero but undulate in a bounded area. For robust controller, obust pte co d so 1 et approaches to zero, but this is not the case for other error component 2 et and 3 et , which has been interpted by Comment 2. For nominal controller, all error components re 1t, e 2 et and 0 Robus t Controll er Nom in al Control l e r e 1 (t) 0246810 -5 0 5 e 2 (t) Robus t Cont rol ler Nominal Controller 0246810 -10 -5 0 e 3 (t) Time(Sec.) Robus t Controll er Nomi nal Cont rol l er Figure 4. Synchronization errors for uncertain Lorenz sys- tem via the robust controller and nominal controller, re- spectively. 3 et varied in the vicinity of certain value, respectively. As mentioned in Comment 2, the error component 2 et and 3 et is independent of and , but decided y (21). Wh1 e th 2 1 u and bich means that bo et 3 et must keep the same when different controller (nominal con- troller and robust controller) acted on the slave system 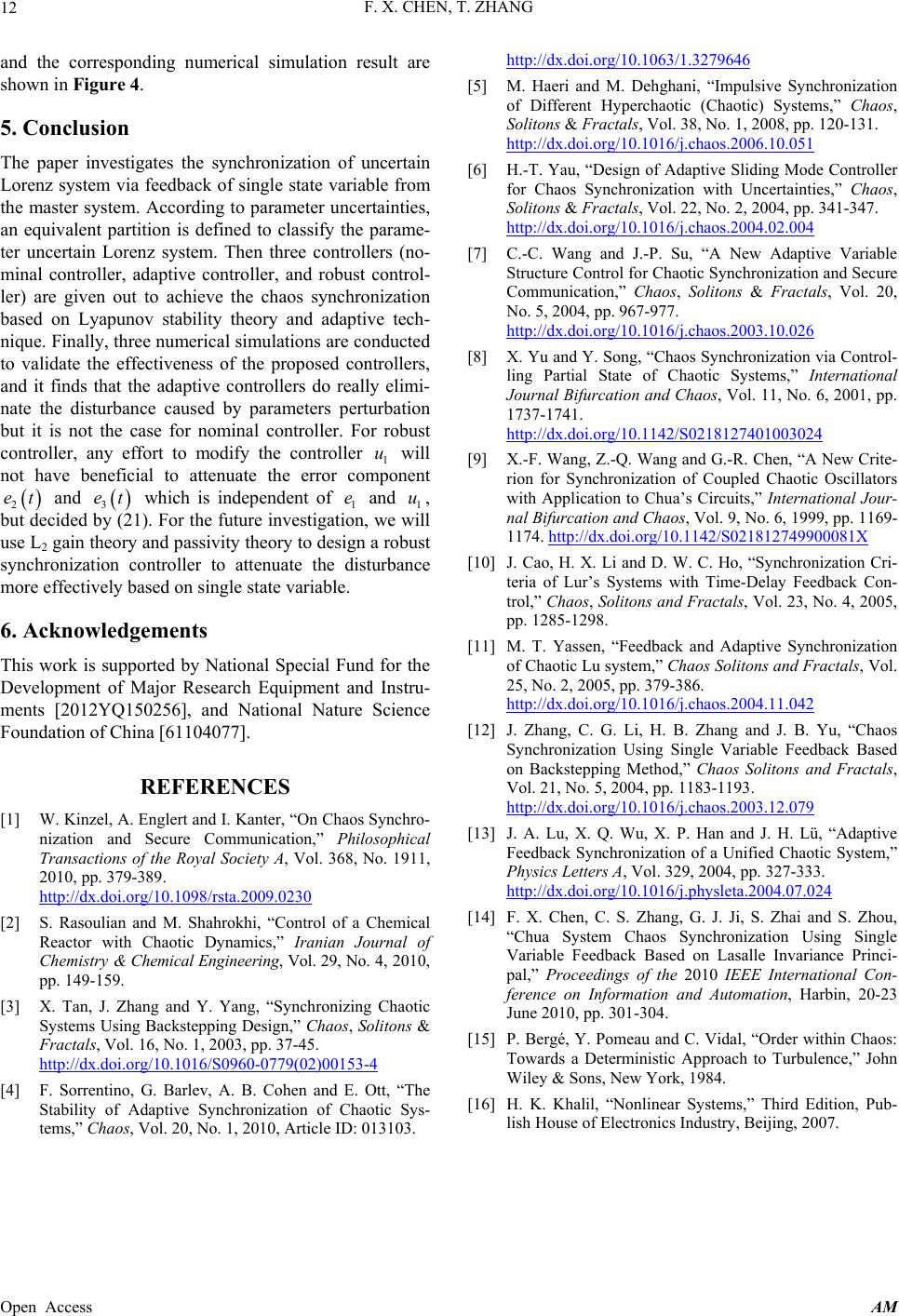 F. X. CHEN, T. ZHANG 12 and orresponding numerical simulation result are shown in Figure 4. 5. Conclusion the c edback of single state variable from ing to parameter uncertain tion is defined to classify the parame- r more effectively b. d I d National Nature Science 77]. Synchro- nization and Secure Communication,” Philosophical Transactions of tho. 1911, 2010, pp. 379- The paper investigates the synchronization of uncertain Lorenz system via fe the master system. Accord an equivalent partities, ter uncertain Lorenz system. Then three controllers (no- minal controller, adaptive controller, and robust control- ler) are given out to achieve the chaos synchronization based on Lyapunov stability theory and adaptive tech- nique. Finally, three numerical simulations are conducted to validate the effectiveness of the proposed controllers, and it finds that the adaptive controllers do really elimi- nate the disturbance caused by parameters perturbation but it is not the case for nominal controller. For robust controller, any effort to modify the controller 1 u will not have beneficial to attenuate the error component 2 et and 3 et which is independent of 1 e and 1 u, but decided by (21). For the future investigation, we will use L2 gain theory and passivity theory to design aobust synchronization controller to attenuate the disturbance ased on single state variable 6. Acknowledgements This work is supported by National Special Fund for the Development of Major Research Equipment annstru- ments [2012YQ150256], an Foundation of C hi na [6 1 10 4 0 REFERENCES [1] W. Kinzel, A. Englert and I. Kanter, “On Chaos e Royal Society A, Vol. 368, N 389. http://dx.doi.org/10.1098/rsta.2009.0230 [2] S. Rasoulian and M. Shahrokhi, “Control of a Chemical Reactor with Chaotic Dynamics,” Iranian Journal of Che mistry & Chemica pp. 149-159. l Engineering, Vol. 29, No. 4, 2010, [3] X. Tan, J. Zhang and Y. Yang, “Synchronizing Chaotic Systems Using Backstepping Design,” Chaos, Solitons & Fractals, Vol. 16, No. 1, 2003, pp. 37-45. http://dx.doi.org/10.1016/S0960-0779(02)00153-4 [4] F. Sorrentino, G. Barlev, A. B. Cohen and E. Ott, “The Stability of Adaptive Synchronization of Chaotic Sys- tems,” Chaos, Vol. 20, No. 1, 2010, Article http://dx.doi.org/10.1063/1.3279646 [5] M. Haeri and M. Dehghani, “Impulsive Synchronization of Different Hyperchaotic (Chaotic ) Systems,” Chaos, Solitons & Fractals, Vol. 38, No. 1, 2008, pp. 120-131. http://dx.doi.org/10.1016/j.chaos.2006.10.051 [6] H.-T. Yau, “Design of Adaptive Sliding Mode Controlle for Chaos Synchronization with Uncertaintier s,” Chaos, Solitons & Fractals, Vol. 22, No. 2, 2004, pp. 341-347. http://dx.doi.org/10.1016/j.chaos.2004.02.004 [7] C.-C. Wang and J.-P. Su, “A New Adaptive Variab Structure Control for Chaotic Synchronization anle d Secure Communication,” Chaos, Solitons & Fractals, Vol. 20, No. 5, 2004, pp. 967-977. http://dx.doi.org/10.1016/j.chaos.2003.10.026 [8] X. Yu and Y. Song, “Chaos Synchronization via ling Partial State of Chaotic Systems,” In Control- ternational Journal Bifurcation and Chaos, Vol. 11, No. 6, 2001, pp. 1737-1741. http://dx.doi.org/10.1142/S0218127401003024 [9] X.-F. Wang, Z.-Q. Wang and G.-R. Chen, “A N rion for Synchronization of Coupled Chaotic Oscillato ew Crite- rs with Application to Chua’s Circuits,” International Jour- nal Bifurcation and Chaos, Vol. 9, No. 6, 1999, pp. 1169- 1174. http://dx.doi.org/10.1142/S021812749900081X [10] J. Cao, H. X. Li and D. W. C. Ho, “Synchronization Cri- teria of Lur’s Systems with Time-Delay Feedback Con- stem,” Chaos Solitons and Fractals, Vol. trol,” Chaos, Solitons and Fractals, Vol. 23, No. 4, 2005, pp. 1285-1298. [11] M. T. Yassen, “Feedback and Adaptive Synchronization of Chaotic Lu sy 25, No. 2, 2005, pp. 379-386. http://dx.doi.org/10.1016/j.chaos.2004.11.042 [12] J. Zhang, C. G. Li, H. B. Zhang and J. B. Y Synchronization Using Single Variable Feedbu, “Chaos ack Based on Backstepping Method,” Chaos Solitons and Fractals, Vol. 21, No. 5, 2004, pp. 1183-1193. http://dx.doi.org/10.1016/j.chaos.2003.12.079 [13] J. A. Lu, X. Q. Wu, X. P. Han and J. H. Lü, “Adaptive Feedback Synchronization of a Unified Chaotic System,” Physics Letters A, Vol. 329, 2004, pp. 327-333. http://dx.doi.org/10.1016/j.physleta.2004.07.024 [14] F. X. Chen, C. S. Zhang, G. J. Ji, S. Zhai and “Chua System Chaos Synchronization Using Single S. Zhou, to Turbulence,” John , 2007. Variable Feedback Based on Lasalle Invariance Princi- pal,” Proceedings of the 2010 IEEE International Con- ference on Information and Automation, Harbin, 20-23 June 2010, pp. 301-304. [15] P. Bergé, Y. Pomeau and C. Vidal, “Order within Chaos: Towards a Deterministic Approach Wiley & Sons, New York, 1984. [16] H. K. Khalil, “Nonlinear Systems,” Third Edition, Pub- lish House of Electronics Industry, Beijing ID: 013103. Open Access AM
|