Energy and Power Engineering, 2013, 5, 733-739
doi:10.4236/epe.2013.54B142 Published Online July 2013 (http://www.scirp.org/journal/epe)
The Control Technology Research of the Z-source
Three-phase Four-bridge Arm Inverter
Xiangli Li, Zhaoyang Yan , Keke Pan, Chenghao Ma, Hanhong Qi
Key Lab of Power Electronics for Energy Conservation and Motor Drive of Hebei Province,
Yanshan university, Qinhuangdao, China
Email: lxl@ysu.edu.cn
Received March, 2013
ABSTRACT
Z-source inverter can boost the voltage of the DC-side, allow the two switches of the same bridge arm conducting at the
same time and it has some other advantages. The zero-sequence current flows through the fourth leg of the three-phase
four-leg inverter so the three-phase four-leg inverter can work with unbalanced load. This paper presents a Z-source
three-phase four-leg inverter which combines a Z-source network with three-phase four-leg inverter. The circuit uses
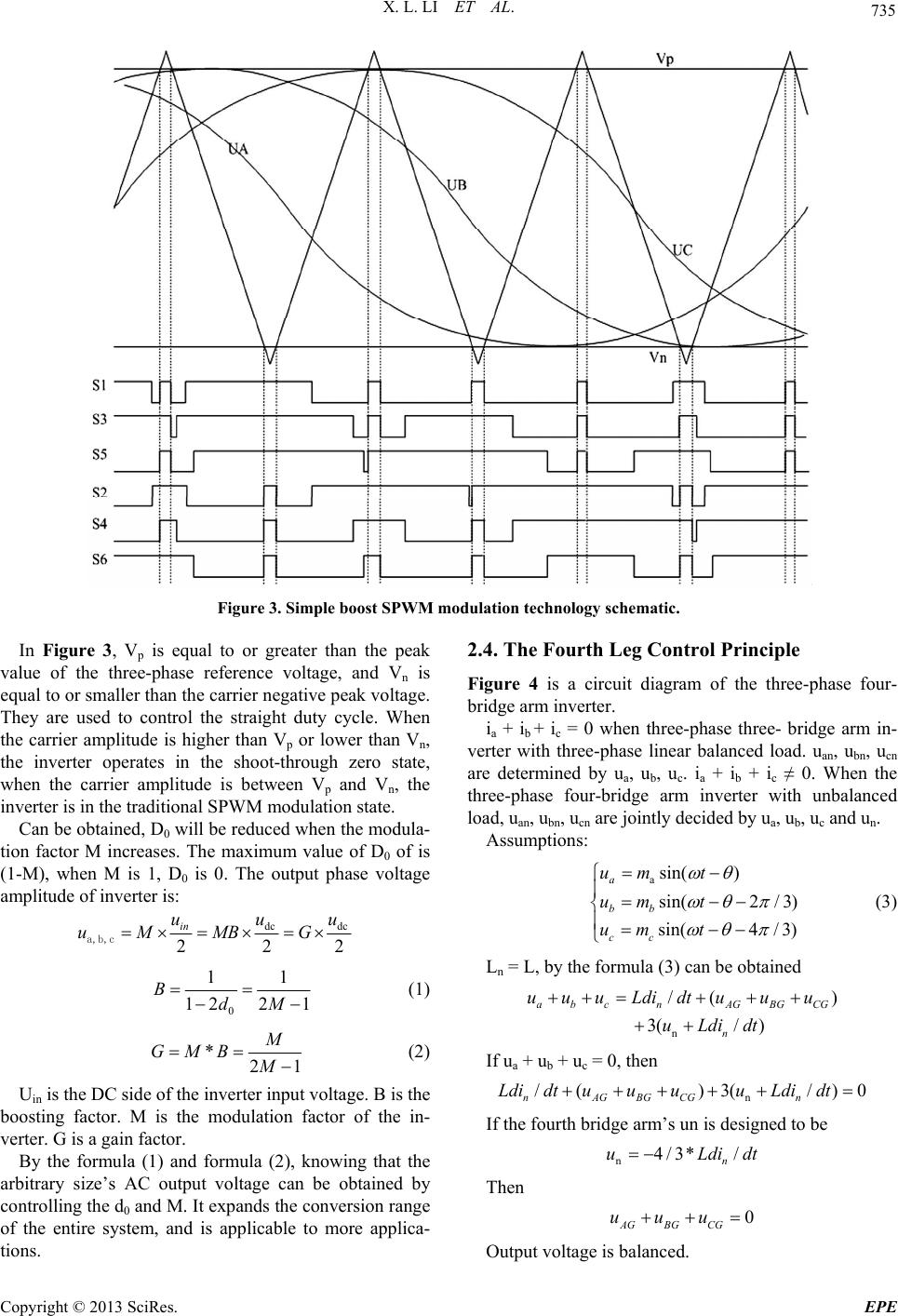
simple SPWM modulation technique and the fourth bridge arm uses fully compensated control method. The inverter
can maintain a symmetrical output voltage when the proposed scheme under the unbalanced load.
Keywords: Z-source Inverter; Three-phase Four-leg inverter; Unbalanced Load; Imbalanced Voltage
1. Introduction
Z-source inverter[1-5] with Buck-Boost characteristic
can boost the low DC power to a specified high voltage,
and the two switches of the same bridge arm can conduct
at the same time. Then there is no longer necessary to
add the dead zone, thereby Z-source inverter can reduce
the harmonic content because of the dead zone setting,
and improve the quality of the power conversion. The
traditional three-phase inverter can not provide pathways
for the zero sequence current which is generated by un-
balanced load, It is only suitable for balanced load.
Three-phase four-bridge arm inverter[6-7] increases a
bridge arm on the basis of the traditional three-bridge
arm inverter structure. And this bridge arm constitutes
midline and then eliminates the need of the midpoint
transformer when the load is unbalanced, reduces the
volume and weight of the system. Dq0 rotating coordi-
nate variables are mutually orthogonal, there is no cou-
pling, they can be individually controlled, but the disad-
vantage of this method is the large amount calculation of
the coordinate transformation and coordinate inverse
transformation[8]. The paper separates the fourth bridge
arm from the other control coupled bridge arm. The
fourth bridge arm is individually controlled. Based on the
advantages of the Z-source network and three-phase
four-bridge arm inverter, this paper presents Z source
three-phase four- bridge arm inverter, and it can improve
the voltage pressure, under the unbalanced load it is able
to maintain a good symmetrical output voltage.
2. Analysis of the Main Circuit
2.1. The Main Circuit
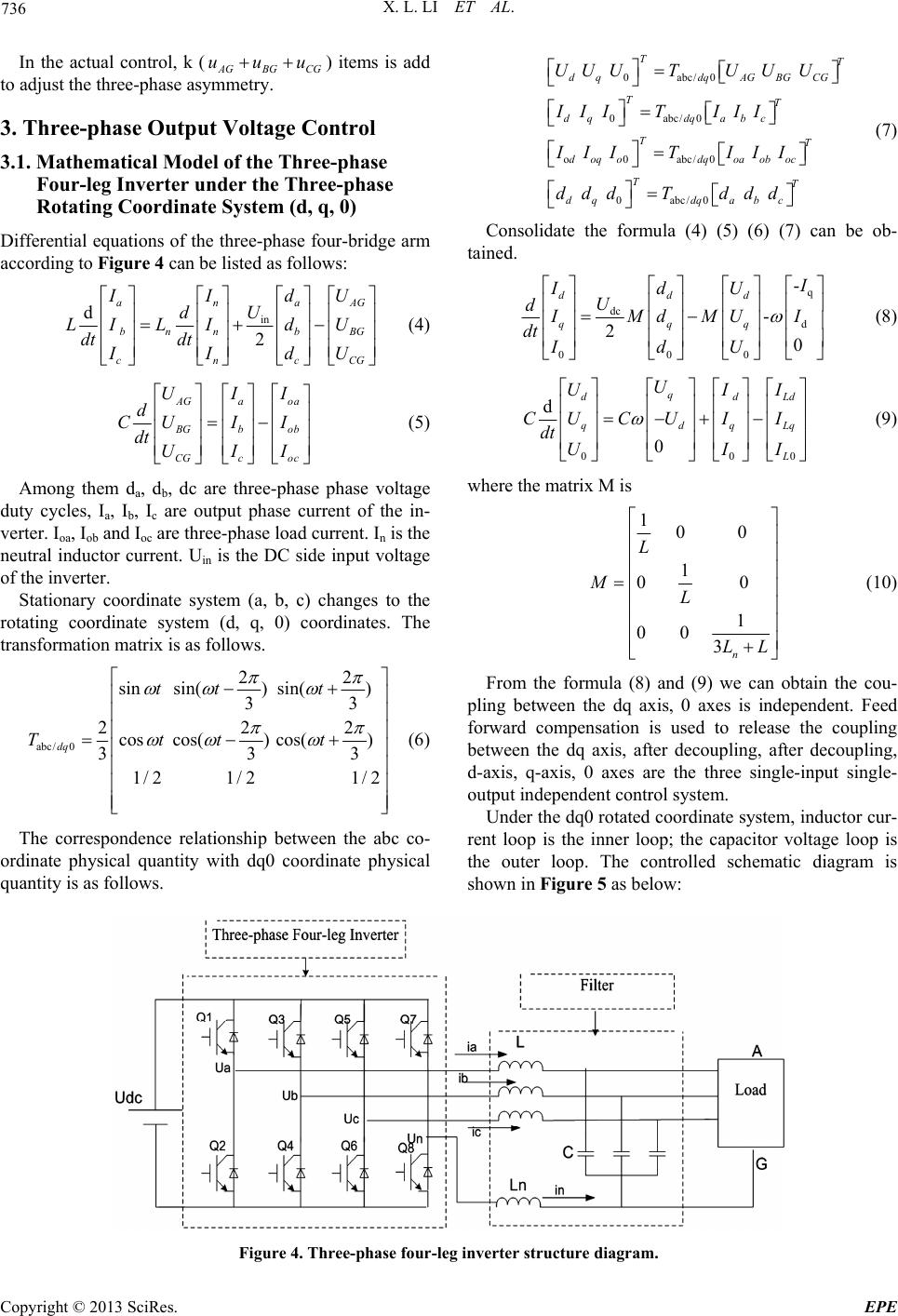
The main circuit is shown in Figure 1. Z-source imped-
ance network is provided by the diode D, capacitor C1,
C2 and inductors L1, L2.In the design of the Z imped-
ance network, the capacitance value of C1, C2 is equal
and the inductance value of L1, L2 is equal. And the
formula is C1 = C2 = C, L1 = L2 = L.
The fourth bridge arm of the three-phase four- bridge
arm inverter is added to the traditional three-phase three
arms. The fourth bridge arm consists of switching tube
Q7, Q8. The midpoint of the bridge arm connects the in-
ductor Ln to the load neutral point. The main function of
the inductance Ln is to filter the switching ripple of the
neutral current. Z-source network and three-phase four-
bridge arm inverter are combined to form a Z -source
three-phase four-bridge arm inverter. The DC voltage
Udc boost by the Z-source network then changes into
alternating current through the four-leg inverter then the
alternating current powers the unbalanced load through
the LC filter.
2.2. Working Principle of Z-source Inverter
Z-source inverter has two working conditions which are
the active state and the shoot-through state. The inverter
can be equivalent to a controlled current source iin.
Figure 2(a) shows the active working state of the Z-
source inverter’s equivalent circuit diagram. When the
Copyright © 2013 SciRes. EPE