Journal of Applied Mathematics and Physics, 2013, 1, 63-67
http://dx.doi.org/10.4236/jamp.2013.14012 Published Online October 2013 (http://www.scirp.org/journal/jamp)
Copyright © 2013 SciRes. JAMP
Kriging of Airborne Gravity Dat a in the
Coastal Ar e as of th e Gulf of Mexi co
Hongzhi Song, Alexey L. Sadovski, Gary Jeffress
Conrad Blucher Institute, Texas A&M University-Corpus Christi, Corpus Christi, USA
Email: Alexey.sadovski@tamucc.edu
Received July 2013
ABSTRACT
This paper deals with the application of kriging technique to find the continuous map of gravity on the geoid in the
coastal areas and to evaluate its precision.
Keywords: Gravity; Kriging; Geoid; Map; Statistics
1. Introduction
By using satellites, scientists discovered the long wave
(large scale) geoid for the Earth (Seeber, 2003; Drink-
water et al., 2003) [1], but its resolution is not sufficient
for orthometric height determination from GPS when it
comes to the relatively small scale and/or local events
such as flooding. This was the case after flooding created
by storm surges fr om hurri can es Katri na, R ita (2 005), a nd
Ike (2008) in the coastal areas of the Gulf of Mexico. So,
there is a need to develop method(s) and model(s) of the
geoid determination at the local level, based on local
observations of gravity, and complemented by observa-
tions of gravity from the air and space.
In principle, there is a need for gravity g at every point
of the Earth’s surface. Gravity is continuously changing,
and it reflects the results of Earth’s phenomena, such as
tropic storm, hurricane, earthquake, early tides, variation
in the atmosphere density, etc. Gravity also alters when
only a small change happened in the constructions and
the density of materials beneath the constructions. But
having gravity data provided everywhere on the Earth is
totally impossible in reality. To predict values of a ran-
dom unsampled area from a set of observations is needed.
It is well known that the kriging method is not the best
approach to predict free-air gravity anomalies, but in this
paper, we assume that the kriging method is a better ap-
proach than other methods for prediction of gravity based
on the airborne data provided by National Geodetic Sur-
vey (NGS). The result we still have a confidence in the
kriging method is that the kriging method can estimate
the prediction error to assess the quality of a prediction.
This function makes the kriging method with a big dif-
ference from other methods.
2. Data
Data used in this chapter is airborne gravity data of the
Gravity for the Redefinition of the American Vertical
Datum (GRAV-D) project which was released by NGS
[2]. Table 1 lists the nominal block characteristics, and
details can be founded in GRAV-D General Airborne
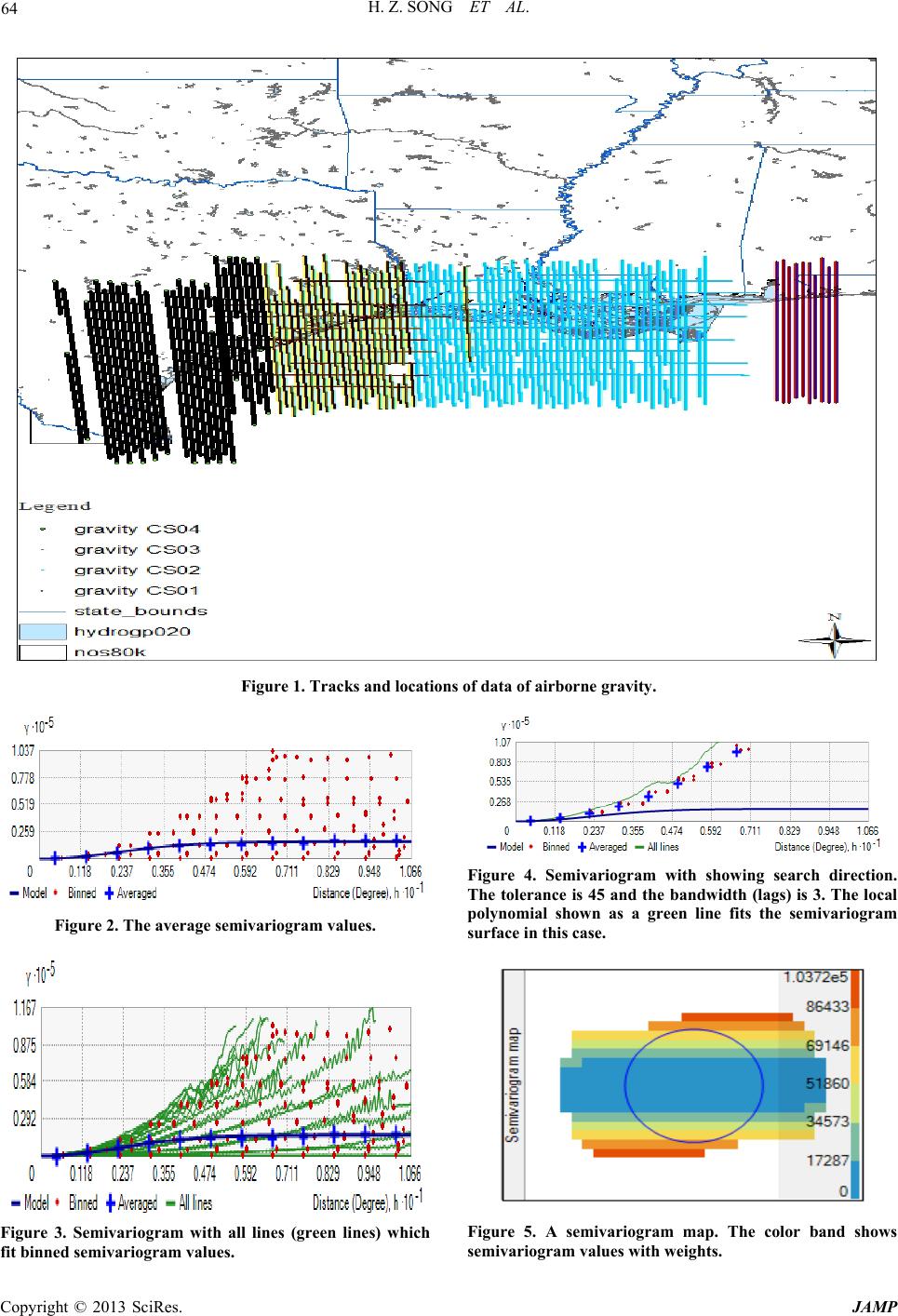
Gravity Data User Manual. Four blocks (Block CS01,
CS02, CS03 and CS04) data (Figure 1) were chosen to
be interpolated.
The total sample size (four blocks together) is 389578,
and the gravity values range between 975480 mGal and
977490 mGal. Keep in mind, the standard gravity is
980665 mGal. The airborne gravity data was fixed by
using free-air reduction and by the international gravity
formula [3].
3. Kriging of Gravity on the Geoid
The kriging method here was conducted by using Arc-
GIS 10.1—Spatial Analyst and Geostatistical Analyst.
There are six different types of kriging in Geostatistical
Analyst tools. The most common types are ordinary
kriging and universal kriging, which were chosen to be
used in this study. The simple kriging method is also
Table 1. Nominal data characteristics.
Characteristic Nominal Value
Altitude 20, 000 ft (~ 6.3 km)
Ground speed250 knots (250 nautical miles/hr)
Along-track gravimeter sampling1 sample per second = 128.6 m (at nominal ground speed)
Data Line Spacing10 km
Data Line length400 km
Cross Line Spacing40-80 km
Cross Line Length500 km
Data Minimum Resolution20 km