 Open Journal of Applied Sciences, 2013, 3, 421-429 Published Online November 2013 (http://www.scirp.org/journal/ojapps) http://dx.doi.org/10.4236/ojapps.2013.37052 Open Access OJAppS Fuzzy Logic Strategy for Solving an Optimal Control Problem of Glucose and Insulin in Diabetic Human Jean Marie Ntaganda Department of Applied Mathematics, School of Pure and Applied Science, College of Science and Technology, University of Rwanda (Huye Campus), Butare, Rwanda Email: jmnta@yahoo.fr, jmntaganda@nur.ac.rw Received August 17, 2013; revised September 27, 2013; accepted October 7, 2013 Copyright © 2013 Jean Marie Ntaganda. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT This paper aims at the development of an approach integrating the fuzzy logic strategy for a glucose and insulin in dia- betic human optimal control problem. To test the efficiency of this strategy, the author proposes a numerical compari- son with the indirect method. The results are in good agreement with experimental data. Keywords: Fuzzy Logic; Optimal Control; Membership Function; Membership Degree; Glucose; Insulin; Numerical Simulation 1. Introduction The blood glucose in human body is controlled by two key organs: the pancreas and the liver. The key hormones are insulin and glucagon. In the pancreas, there are clus- ters of endocrine cells scattered throughout the tissue. These are the α-cells and the β-cells. The α-cells produce glucagon and the β-cells produce insulin. The pancreas secretes these antagonistic hormones into the extracellu- lar fluid, which then enters the circulatory system and regulates the concentration of blood glucose. For biolo- gists, this is known as a simple endocrine pathway. Hu- man bodies need to maintain glucose concentration level in a narrow range 70 - 120 mg/dl. If glucose concentra- tion level is significantly out of the normal range, this person is considered to have the plasma glucose problem: Hyperglycemia (greater than 140 mg/dl after an Oral Glucose Tolerance Test, or greater than 100 mg/dl after a Fasting Glucose Tolerance Test) or hypoglycemia (less than 40 mg/dl). Diabetes mellitus is an endocrine disorder caused by a deficiency of insulin (Type 1 Diabetes) or a decreased response to insulin in target tissues (Type 2 Diabetes) [1]. The major long-term effects of diabetes are caused by hyperglycemia. Prolonged hyperglycemia can cause com- plications, which may lead to kidney disease, blindness, loss of limbs, and so on. The hypoglycemia can lead to dizziness, coma, or even death. Type 1 diabetes was pre- viously called insulin-dependent diabetes mellitus (IDDM) or juvenile-onset diabetes. It is an autoimmune disorder in which the immune system destroys the β-cells of the pancreas. Previously known as non-insulin dependent dia- betes (NIDDM) or maturity onset diabetes, Type 2 dia- betes is essentially a disorder of middle age onwards. However, with the increase in childhood obesity in recent years there have been increasing reports of this form of diabetes in much younger age groups. Therein lies a clue to the origin of this disorder, because Type 2 diabetes is closely linked to obesity. As the rates of obesity have soared over the last twenty years, so in tandem has the incidence of Type 2 diabetes. The underlying factor lead- ing to Type 2 diabetes is a failure of the pancreas to pro- duce sufficient insulin. This may be for one or both of two reasons. The first is that there are insufficient insulin producing cells in the pancreas to meet demands. The second is that there is resistance by the body’s target cells to the insulin which is produced, thus requiring in- creasing amounts to ensure effect. Either way the ulti- mate poverty of effect of insulin is related to over weight or obesity. One of the main actions of insulin is to help regulate blood sugar (or to be precise, blood glucose) levels. It achieves this in part by promoting uptake of sugar by cells, that is, muscle cells. Insufficient action of insulin leads to a reduction in sugar uptake and therefore 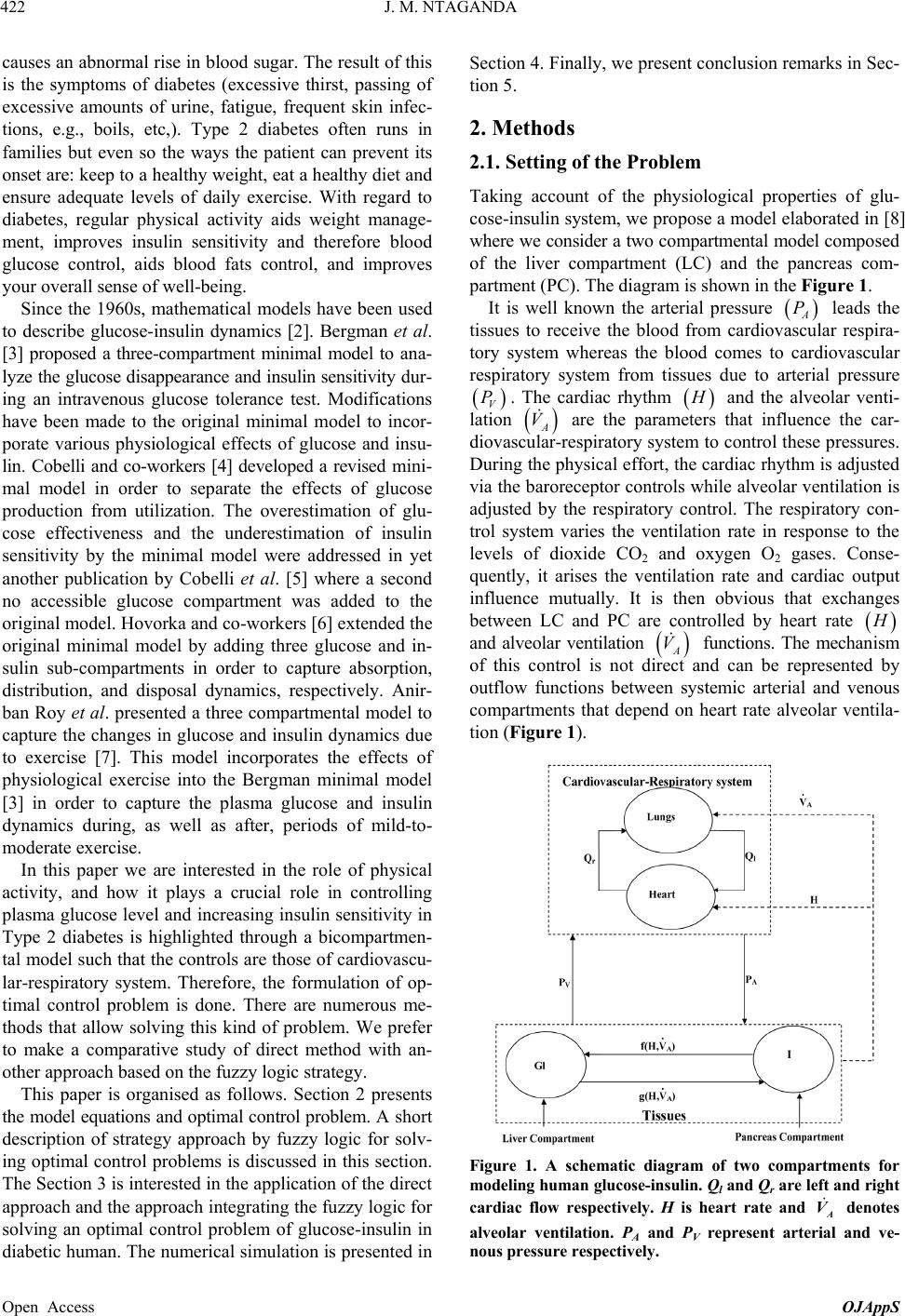 J. M. NTAGANDA 422 causes an abnormal rise in blood sugar. The result of this is the symptoms of diabetes (excessive thirst, passing of excessive amounts of urine, fatigue, frequent skin infec- tions, e.g., boils, etc,). Type 2 diabetes often runs in families but even so the ways the patient can prevent its onset are: keep to a healthy weight, eat a healthy diet and ensure adequate levels of daily exercise. With regard to diabetes, regular physical activity aids weight manage- ment, improves insulin sensitivity and therefore blood glucose control, aids blood fats control, and improves your overall sense of well-being. Since the 1960s, mathematical models have been used to describe glucose-insulin dynamics [2]. Bergman et al. [3] proposed a three-compartment minimal model to ana- lyze the glucose disappearance and insulin sensitivity dur- ing an intravenous glucose tolerance test. Modifications have been made to the original minimal model to incor- porate various physiological effects of glucose and insu- lin. Cobelli and co-workers [4] developed a revised mini- mal model in order to separate the effects of glucose production from utilization. The overestimation of glu- cose effectiveness and the underestimation of insulin sensitivity by the minimal model were addressed in yet another publication by Cobelli et al. [5] where a second no accessible glucose compartment was added to the original model. Hovorka and co-workers [6] extended the original minimal model by adding three glucose and in- sulin sub-compartments in order to capture absorption, distribution, and disposal dynamics, respectively. Anir- ban Roy et al. presented a three compartmental model to capture the changes in glucose and insulin dynamics due to exercise [7]. This model incorporates the effects of physiological exercise into the Bergman minimal model [3] in order to capture the plasma glucose and insulin dynamics during, as well as after, periods of mild-to- moderate exercise. In this paper we are interested in the role of physical activity, and how it plays a crucial role in controlling plasma glucose level and increasing insulin sensitivity in Type 2 diabetes is highlighted through a bicompartmen- tal model such that the controls are those of cardiovascu- lar-respiratory system. Therefore, the formulation of op- timal control problem is done. There are numerous me- thods that allow solving this kind of problem. We prefer to make a comparative study of direct method with an- other approach based on the fuzzy logic strategy. This paper is organised as follows. Section 2 presents the model equations and optimal control problem. A short description of strategy approach by fuzzy logic for solv- ing optimal control problems is discussed in this section. The Section 3 is interested in the application of the direct approach and the approach integrating the fuzzy logic for solving an optimal control problem of glucose-insulin in diabetic human. The numerical simulation is presented in Section 4. Finally, we present conclusion remarks in Sec- tion 5. 2. Methods 2.1. Setting of the Problem Taking account of the physiological properties of glu- cose-insulin system, we propose a model elaborated in [8] where we consider a two compartmental model composed of the liver compartment (LC) and the pancreas com- partment (PC). The diagram is shown in the Figure 1. It is well known the arterial pressure leads the tissues to receive the blood from cardiovascular respira- tory system whereas the blood comes to cardiovascular respiratory system from tissues due to arterial pressure A P V P. The cardiac rhythm and the alveolar venti- lation A V are the parameters that influence the car- diovascular-respiratory system to control these pressures. During the physical effort, the cardiac rhythm is adjusted via the baroreceptor controls while alveolar ventilation is adjusted by the respiratory control. The respiratory con- trol system varies the ventilation rate in response to the levels of dioxide CO2 and oxygen O2 gases. Conse- quently, it arises the ventilation rate and cardiac output influence mutually. It is then obvious that exchanges between LC and PC are controlled by heart rate and alveolar ventilation A V functions. The mechanism of this control is not direct and can be represented by outflow functions between systemic arterial and venous compartments that depend on heart rate alveolar ventila- tion (Figure 1). Figure 1. A schematic diagram of two compartments for modeling human glucose-insulin. Ql and Qr are left and right cardiac flow respectively. H is heart rate and denotes alveolar ventilation. PA and PV represent arterial and ve- nous pressure respectively. A V Open Access OJAppS 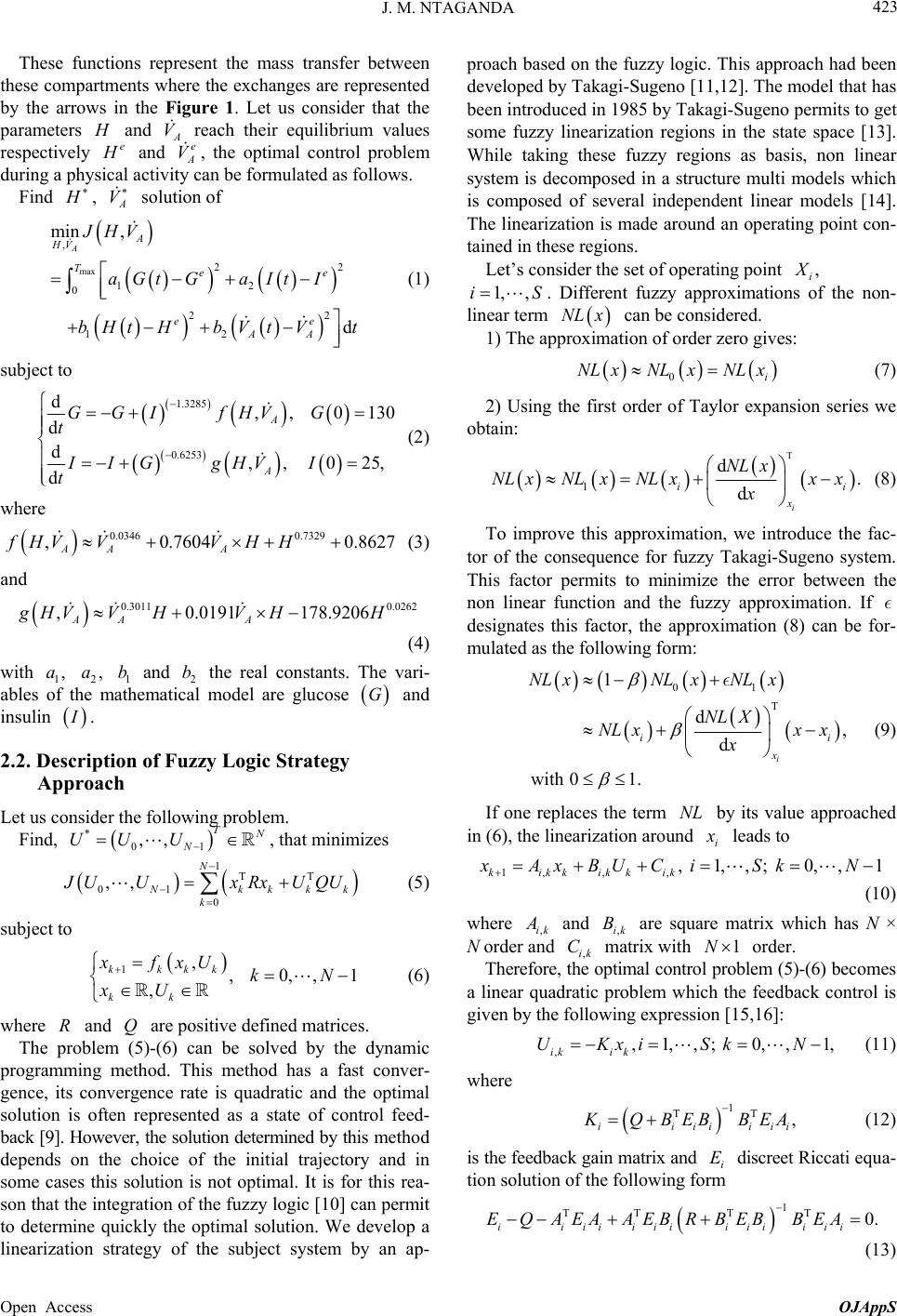 J. M. NTAGANDA 423 These functions represent the mass transfer between these compartments where the exchanges are represented by the arrows in the Figure 1. Let us consider that the parameters and reach their equilibrium values respectively A V e and , the optimal control problem during a physical activity can be formulated as follows. e A V Find , solution of A V max , 22 12 0 22 12 min , d A A HV Tee ee AA JHV aGtGa ItI bHtHbV tVt (1) subject to 1.3285 0.6253 d,, 0130 d d,, 025, d A A GGIfHV G t IIGgHV I t (2) where 0.0346 0.7329 , 0.76040.8627 AA A fHVVVHH (3) and 0.3011 0.0262 ,0.0191 178.9206 AA A gHVVHV HH (4) with 1 2 1 and 2 b the real constants. The vari- ables of the mathematical model are glucose ,a,a b G and insulin . 2.2. Description of Fuzzy Logic Strategy Approach Let us consider the following problem. Find, * 01 ,, T N UU U 1N , that minimizes TT 01 0 ,, kkk k k UU xRxUQU (5) subject to 1,, 0,,1 , kkkk kk xfxU kN xU (6) where and are positive defined matrices. RQ The problem (5)-(6) can be solved by the dynamic programming method. This method has a fast conver- gence, its convergence rate is quadratic and the optimal solution is often represented as a state of control feed- back [9]. However, the solution determined by this method depends on the choice of the initial trajectory and in some cases this solution is not optimal. It is for this rea- son that the integration of the fuzzy logic [10] can permit to determine quickly the optimal solution. We develop a linearization strategy of the subject system by an ap- proach based on the fuzzy logic. This approach had been developed by Takagi-Sugeno [11,12]. The model that has been introduced in 1985 by Takagi-Sugeno permits to get some fuzzy linearization regions in the state space [13]. While taking these fuzzy regions as basis, non linear system is decomposed in a structure multi models which is composed of several independent linear models [14]. The linearization is made around an operating point con- tained in these regions. Let’s consider the set of operating point , i 1, ,iS . Different fuzzy approximations of the non- linear term NL x can be considered. 1) The approximation of order zero gives: 0i NL xNLxNL x (7) 2) Using the first order of Taylor expansion series we obtain: T 1 d. d i ii x NL x NL xNLxNLxxx x (8) To improve this approximation, we introduce the fac- tor of the consequence for fuzzy Takagi-Sugeno system. This factor permits to minimize the error between the non linear function and the fuzzy approximation. If designates this factor, the approximation (8) can be for- mulated as the following form: 01 T 1 d, d with 01. i ii x NL xNLxNLx NL X NL xxx x (9) If one replaces the term by its value approached in (6), the linearization around NL i leads to 1, ,, , 1,,;0,,1 kikkikkik xAxBUCi SkN (10) where ,ik and ,ik are square matrix which has N × N order and matrix with order. B ,ik Therefore, the optimal control problem (5)-(6) becomes a linear quadratic problem which the feedback control is given by the following expression [15,16]: C1N ,,1,,; 0,,1 iki k UKxi SkN, (11) where 1 TT , iiiiiii QBEB BEA (12) is the feedback gain matrix and i discreet Riccati equa- tion solution of the following form E 1 TTT T 0. ii iii iii iiiii EQA EAA EBRBEBBEA (13) Open Access OJAppS  J. M. NTAGANDA Open Access OJAppS 424 It is obvious that the linearization around every oper- ating point gives the system for which the equations have the form (10). Because there are operating points, we have systems which have this form. Therefore, ac- cording to the relation (11) controls are determined. The defuzzyfication method [12] permits to determine only one system and only one control . S S S k Then, this transformation gives the following equation: U 1, 0,,1, kkk xAxBUCk N (14) , 0,,, kk UKxk N (15) where ,, 11 11 , 11 11 , , and , SS iiikiiik ii SS ii ii ii SS i iiki iik ii SS ii ii ii xA xB AB xx xC xK CK xx 0.2671 1 0.9654 2 0.7329 3 0.0346 0.9738 1 0.6989 2 3 0.7604 0.7329 0.0346 0.7604 , 1.49330.7329 0.0346 0.0191 4.6877 0.3011 0.0191 , ee fA ee fA eee ee fA A e A ee gA ee e gA e g CVH CV H CfHVHVH V CV H CVHH CgH 0.0262 0.3011 4.6877 0.30110.0382 . ee A eee AA VH VHV Let us set the following variable change , (16) TT , and , eee e AA XGGII UHHVV .(18) Therefore, the system (17) is written as the follows 1.3285 1 12 11223 0.6253 2 21 112 23 d d d d . ee ee fA ee ee ggA XXGXI t CUHCU VC XXI XG t CUHC UVC and where ii designates membership degree part- ner to the operating point i . f g (19) 3. Numerical Approaches for Solving the Optimal Control Problem (1)-(2) Using explicit Euler scheme on an uniform grid , the system (19) is approximated by the following (see Equation (20)) 3.1. Fuzzy Logic Strategy To approximate the optimal control problem (1)-(2), we propose to use the explicit Euler scheme. The stability of this scheme constitutes an advantage to approach some ordinary differential equations. where max T hN . To approximate the objective function of the problem (1), we use the rectangular method. Hence, we obtain From the function and given by (3) and (4) respectively, the Taylor expansion around e and allows the system (2) to become e A V 1.3285 12 3 0.6253 12 3 d d d, d fA f ggAg GGI CHCVC t IIG CHCVC t (17) 1TT 12 0 ,, N N kkkk k XUXRXU RUh (21) where T 1, 2, , kkk XXX . and are the matrix 1 R2 R ab 11 12 22 00 , 00 RR ab k f k g The system (20) has two following nonlinear factors: where 1.3285 1, 11,2,11,22, 1.3285 2,12 3 0.6253 2, 12,1,11,22, 0.6253 1,12 3 1 1 , e kkkfkf ee ee kffA e kkk gkg ee ee kggA XhXhXICUCU hGXICH CVC XhXhXGCUCU hIXGCH CVC (20)  J. M. NTAGANDA 425 1.3285 2 0.6253 1 and . e e NL XXI NL XXG The objective is to linearize these terms. This mecha- nism allows determining the Takagi-Sugeno fuzzy sys- tem. For this, we apply the fuzzy strategy and we con- sider the case of health person who exercises most regu- larly by jogging. We take Ge = 90 mg/dl and Ie = 30 μU/dl. The equilibrium of cardiovascular respiratory pa- rameters values e and for someone who does physical activity are given by the table (See [17]). e A V We consider a universe of discourse which has two linguistic variables: glucose (GL) and insulin (INS). Taking account of the physiology, we consider 60,140G and 20, 40I. Therefore, the glucose (resp. insulin) is low if 60Gmgdl (resp. I = < 20 μU/dl). If (resp. I) is included between 60 and G 140mgdl (resp. 20 and 40Udl ), we suppose that the glucose (resp. insulin) is normal. While if (resp. ) we say that the glucose (resp. insulin) is the highest. Then, GLB (Low glucose), GLN (Normal glucose) and GLE (the highest glucose) constitute the terms (fuzzy sets) of the linguistic variable GL. In an analogous way, INSB (Low insulin), INSN (Normal in- sulin) and INSE (the highest insulin) are the terms of the variable linguistic INS. 140G 40 I According the relation (18) and equilibrium values given by the Table 1, we have 130, 50X and 215, 5X . During the physical activity, the glucose (resp. insulin) varies such that we can consider a universe of discourse where the labels are centered at −30, 10 and 50 (resp. −15, −5 and 5). Then, we suppose that the- ses centers constitute the operating points values of the system (20). We designate these points as Mi, 1,i2, 3 , for the first equation of the system (20) and as for the second. It is obvious that these points take the corresponding values in the labels centers of a uni- verse of discourse , i N 1,2, 3,i [10]. Membership functions asso- ciated to this labeling are represented in the Figure 2. To simplify, we consider only the Taylor expansion of first order around the operating points i and i. We obtain three systems of the following form (see Equation (22)) N Finally, the optimal control problem (1)-(2) can be formulated as follows. Find solution of T 0 ,, N UU U 1N 1 TT 12 0 min ,kk kk Uk XUXRXU RUh (23) subject to 1,, , , 1,2,3, kikkikkik XAXBUCi (24) where 10 , 1,2,3 01 i h Ai h 0.6253 0.6253 12 1.3285 1.3285 12 , 1,2,3 ee ifi iee igi NI CNI C Bh MG CMG C i f g f g Let us set 0.6253 123 1.3285 123 , 1, 2, 3. ee ee iffA iee ee iggA GNI CHCVC Ch IMGCHCVC i 100N and , then the follow- in Table 1. Equilibrium of cardratory system Parameter G (mg/dl) I (μU/dl He (Beats/min) (L/min) max 10T g results are 0 found .90, 1,2,3 00.9 i Ai 12 3 0.2133 1.95780.15501.4225 , 0.00011 0.00390.000050.0019 0.1256 1.1526 0.00003 0.0013 BB B 123 4.01425.3775 6.0648 , , . 2.9543 2.9769 2.9851 CCC iovascular-respi parameters in the jogging case. e ee A V Value 90 30 140 15 (22) 1.3285 1, 11,11,22, 1.3285 123 0.6253 2, 12,11,22, 0.6253 123 1 , 1 . 1,2,3 e kki fkfk ee ee iffAf e kki gkgk ee ee iggAg XhXhNGCUCU hGNGCH CV C XhXhMICUCU hIMICHCVCi Open Access OJAppS 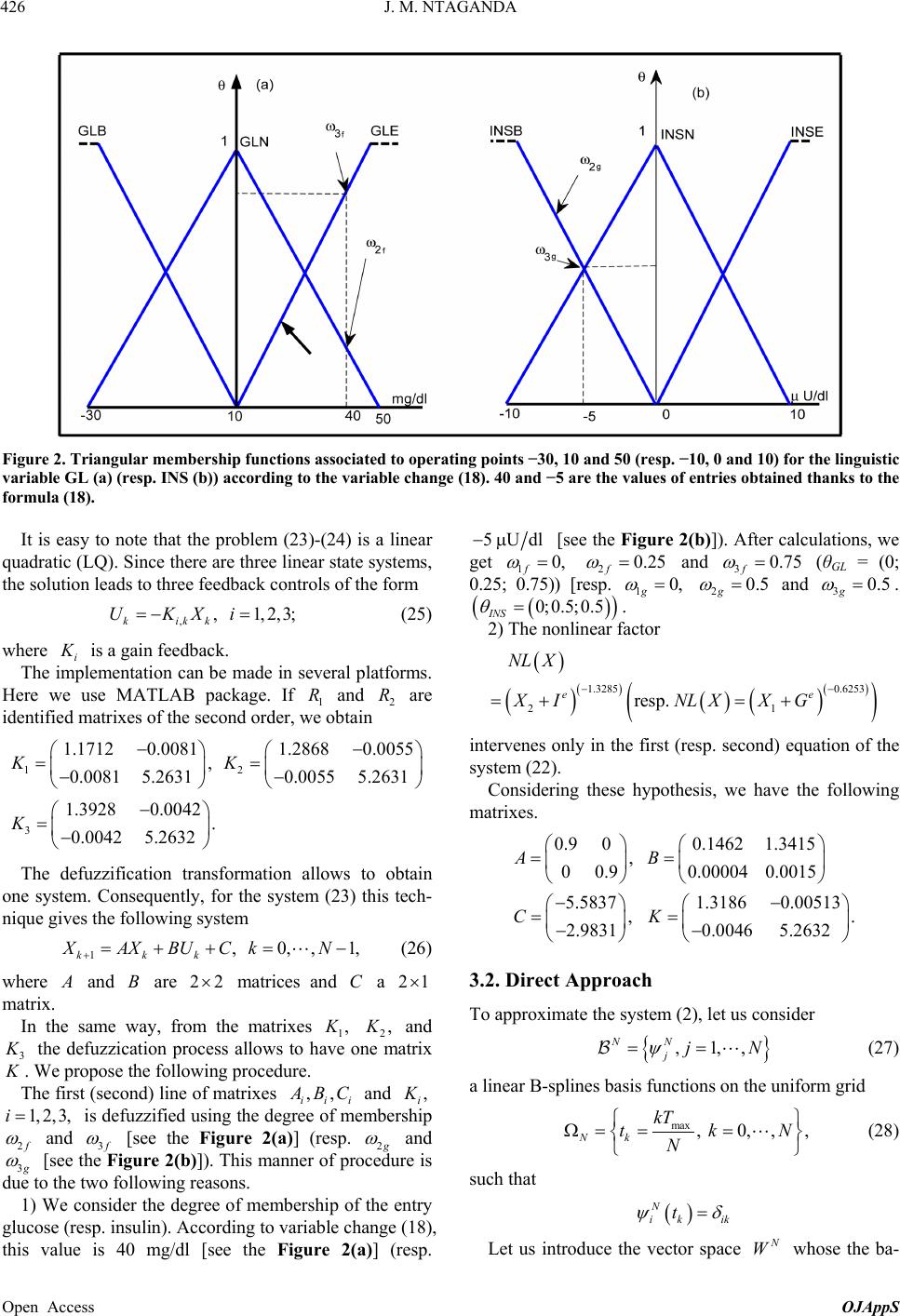 J. M. NTAGANDA 426 Figure 2. Triangular membership functions associated to operating points −30, 10 and 50 (resp. −10, 0 and 10) for the linguistic variable GL (a) (resp. INS (b)) according to the variable change (18). 40 and −5 are the values of entries obtained thanks to the formula (18). It is easy to note that the problem (23)-(24) is a linear quadratic (LQ). Since there are three linear state systems, the solution leads to three feedback controls of the form (25) ,, 1,2,3; kikk UKXi where i is a gain feedback. The implementation can be made in several platforms. Here we use MATLAB package. If and are identified matrixes of the second orde s (26) where 1 R r, we obtain 2 R 12 1.1712 0.00811.2868 0.0055 , 0.0081 5.26310.00555.2631 KK 3.00425.2632 1.39280.0042 . 0 K The defuzzification transformation allows to obtain one system. Consequently, for the system(23) thitech- nique gives the following system 1, 0,,1, kkk XAXBUCk N and are matrices and a B22C21 matrix. In the same way, from the matrixes 1, 2, and 3 K the defuzzication process allows to haatrix ve one m . We propose the following procedure. The first (second) line of matrixes ,, iii BC and , i 1,2, 3,i is defuzzified using the dembgree of meership 2 and 3 [see the Figure 2(a)] (resp. 2 and 3 [see he the Figure 2(b)]). This ma reaso consider the degree of membership of the entry glle change thi nner of procedure is due to t two following ns. 1) We ucose (resp. insulin). According to variab (18), s value is 40 mg/dl [see the Figure 2(a)] (resp. 5Udl get 1 [see the Figure 2(b)]). After calculations, we 0, f 20.25 f and 30.75 f (θ = (0; 0.2 GL 5; 0.75)) [resp. 1g0, 20.5 g and 30.5 g . 0.5 . linear factor 0;0.5 S ) The non ; IN 2 NL X 1.3285 0.6253 21 resp. ee XINL XXG int quatio the sy Consi matr ch To aus consider ervenes only in the first (resp. second) en of stem (22). dering these hypothesis, we have the following ixes. 0.9 00.146 ,AB 21.3415 00.90.00004 0.0015 5.58371.3186 0.00513 ,. 2.98310.0046 5.2632 CK 3.2. Direct Approa pproximate the system (2), let ,1,, NN jjN (27) a linear B-splines basis functions on the uniform grid max , 0,,, Nk tk N N kT (28) such that N ik ik t W Let us introduce the vector space whose the ba- Open Access OJAppS  J. M. NTAGANDA 427 sis is . dim N WW Let us co olation o We have r and let us take the in- terp perator WN 1NN nside 00,WC T : N N WW (29) satisfying ,1, N kk ttk ,.N (30) We verify easily that 0 N N EE (31) 0 sup 1. N NE E W (32) 0 Now, let us set NN 0 , and Nk fff NNNk kk k ggg N k (33) with , and , k kAk , kk kA fHtV tg gHtVt Theref lowing form ore, the system () can be ap solution of the system proached by the fol- Find 2 , NNN GI W 1.3285 dN d NN GI f t G (34) 0.6253 dN d NN P Gg t (35) ,0 ,0 0, 0 NNN GPII , N (36) such that 0,0 0 N N GG (37) 0,00. N N II ( his approximation, we have the follow- The tion sequence of the system (34)-(36) co ve 38) According to t sult. Proposition [8] solu ing re n- rges uniformly toward the solution of the system (2) on the interval max 0, ,T ximate the max 0.T optimTo apal problem (1)-(2), let pro T , us set GI the state vector, T 000 , GI the initial state vector, T , eee GI tlibrium state vector, the control vector and the equilibrium control v he wanted equi T ,A HV , ee HV T e A ector; 0 ,,, e ii i xx xi and e i designate the components th i th i of the vector 0 ,, e x,xx and . e Therefore, the problem (1)-(2) can ta compact form ke the following 2 min N QJ max TN ax 2 22 d, ee t xbtt 011 ii ij jj ij where T , NNN xxx is solution of the approximated so (39) 12 lution (34)-(36). We must determine 12 , MMM ap- Q 2 MM an proximate so that we can w (40) Therefore, wfunction by lution of (39) in .It is nec- essary to noterite QW ,, 1,2. M j kk tj 0 M M j k e can approximate the objective 22 , 11 1 , Ne Me ii kijjkj ki j t xbt 22M ax MN J (41) where max T tN . The convergence of the discreet o tive function (41) toward the continuous objective func- en by the proble al control problem (1)-(2) is a mini- mraint. The discreet tio written as follows. bjec- tion givm (39) has been shown in [8]. Finally, the optim isation problem with const formula- n of such problem can be Find 11 ,MM M solution of 11 T T 12 min , MM M MM N JtYRYR M (42) subject to 1.3285 0.6253 d d d, d N NN N NN GGIf t I Gg t where (43) is a matrix 12M such that the com- ponents , k e those function in and Y is ar the matrix such that the ,ponent is th ik com , e ik i tx where T 12 , NNN xxx is the solution of (1)-(2) associated to . 4. Numerical Simulation Wte cardiovasculartory response to glucose and insulin dynamic for a 30-year-old trained e consider the acu respira Open Access OJAppS  J. M. NTAGANDA 428 women whose mean values are given in Table 1 [17 The solutions of the optimal control problem (23)-(2 and (42)-(43) can be determined in several platform. n of these solutions is made using M ges. To solve the problem (23)-(26) by fuzzy logic strategy only one program is enough. Using direct approach, the solutions of the problem (42)-(43) are give sion of programs based on MATLAB function used in optimization that is fmincon. This function is a MAT- rogrws solving e by A pproach integratin and direct aponsequently, t r the execution of main MATLAB DIR r. The results are tel(R) core (TM)2 Duo fu ]. 4) The AT-implementatio LAB packa n by a succes- LAB pam which allo minimization prob- lem with constraints. In this section, we notHLF, ADIR to designate respectively the hybrid ag fuzzy logic proach. Che Table 2 gives us the results found afte program for AHLF, Aespectively obtained using a Processor In CPU, 2.20 GHZ. Table 2 shows that the time execution of the main program to solve the problem (1)-(2) by AHLF is very small compared to one of ADIR. This argument justifies the precision of the fuzzy logic strategy. Considering jogging as physical activity for a 30-year old trained woman, the variations of the optimal parame- ters is obtained using the hybrid approach integrating zzy logic and the direct approach. The results are given in the curves represented in the Figure 3. Table 2. Minimal values of the objective function (Jopt) and the execution time (T) of main program for the resolution of the optimal control problem (1)-(2) by AHLF, ADIR. AHLF ADIR Jopt 10.0524 35.8572 T (Second) 5.8125 20.286 Figure 3. Optimal parameters for a 30 year old woman with jogging as her physical activity. The curve in solid line representse wanted valucurve in dasdi- cates theimal paramee hybrid a inte- grating the fuzzy logic strategy For-old womrate and alveolar ventilation play a crucial ro in the control of the car- diovascular-respiratory system. Consequently, their sta- bility ensures the performance of sportsman in general and of woman in particular. For a woman of 30 years old where jogging is her regular physical activity, we see that 2.5 minutes after the starting of the exercise the variation of the heart rate reaches the value close to the equilib- rium value before having its oscillation around this value (Figure 3(a)). The solutions from AHLF and ADIR show that after 5 minutes of the starting time the optimal al- veolar ventilation (Figure 3(b)) increases to reach the wanted equilibrium value and the glucose (Figure 3(c)) decreases gradually to reach the wanted value in 10 min- utes before its oscillation around this value. The use of these approaches allows also the optimal insulin to in /j.1365-2362.32.s3.5.x th op e. The hed line in tter for th . pproach r a 30-yeaan, the heart le - crease and to reach the maximum that is close to the wanted value at 3th minute before its oscillation around his value (Figure 3(d)). Comparing the results using AHLF and ADIR, it is important to see in the Figure 3 that they are much closed. 5. Conclusion Remarks In this work, we compared two approaches to determine the optimal trajectories of glucose and insulin as response to controls of cardiovascular-respiratory system subjected to a physical activity. The finding results for two used methods are satisfactory and closed. But the hybrid ap- proach integrating the fuzzy logic strategy has an advan- tage over the direct approach in term of time. Conse- quently, it constitutes an important approach for the resolution of the optimal control problem. In particular, it gives the optimal trajectories of glucose-insulin system in the same way so thet it ensures their performance. REFERENCES [1] R. N. Bergman, D. T. Finegood and S. E. Kahn, “The Evolution of Beta-Cell Dysfunction and Insulin Resis- tance in Type 2 Diabetes,” European Journal of Clinical Investigation, Vol. 32, Suppl. 3, 2002, pp. 35-45. http://dx.doi.org/10.1046 Normal Blood Glucose Re- d Physiology, Vol. 16, No. 5, [2] V. W. Bolie, “Coefficients of gulation,” Journal of Applie 1961, pp. 783-788. [3] R. N. Bergman, L. S. Phillips and C. Cobelli, “Physiol- ogic Evaluation of Factors Controlling Glucose Tolerance in Man: Measurement of Insulin Sensitivity and Beta-Cell Glucose Sensitivity from the Response to Intravenous Glucose,” The Journal of Clinical Investigation, Vol. 68, No. 6, 1981, pp. 1456-1467. http://dx.doi.org/10.1172/JCI110398 [4] C. Cobelli, G. Pacini, G. Toffolo and L. Sacca, “Estima- tion of Insulin Sensitivity and Glucose Clearance from Minimal Model: New Insights from Labeled IVGTT,” Ame- Open Access OJAppS  J. M. NTAGANDA Open Access OJAppS 429 [5] C. Cobelli, A. Caumo and M. Omenetto, “Minimal Model SG Overestimimation: Improved Accuracy by ament Model,” Ame- . Um- Distribu- Physical Activity,” rican Journal of Physiology, Vol. 250, No. 5, 1986, pp. E591-E598. ation and SI Underest Bayesian Two-Compart rican Journal of Physiology, Vol. 277, No. 3, 1999, pp. E481-E488. [6] R. Hovorka, F. Shojaee-Moradie, P. V. Carroll, L. J. Chas- sin, I. J. Gowrie, N. C. Jackson, R. S. Tudor, A. M pleby and R. H. Jones, “Partitioning Glucose tion/Transport, Disposal, and Endogenous Production during IVGTT,” American Journal of Physiology: Endo- crinology and Metabolism, Vol. 282, No. 5, 2002, pp. E992-E1007. [7] M. S. Anirban Roy and R. S. Parker, “Dynamic Modeling of Exercise Effects on Plasma Glucose and Insulin Lev- els,” Journal of Diabetes Science and Technology, Vol. 1, No. 3, 2007, pp. 338-347. [8] J. M. Ntaganda and B. Mampassi, “Modelling Glucose and Insulin in Diabetic Human during 2012 Proceeding of the 4th International Conference on Mathamatical Sciences (ICM), United Arab Emirates Uni- versity, 11-14 March 2012, pp. 331-344. [9] S. J. Yakowitz, “The Stagewise Kuhn-Tucker Condition and Differential Dynamic Programming,” IEEE Transac- tions on Automatic Control, Vol. 31, No. 1, 1986, pp. 25- 30.http://dx.doi.org/10.1109/TAC.1986.1104123 [10] N. K. Masmoudi, C. Rekik, M. Djemel and N. Derbel, ‘‘Decomposition and Hierarchical Control for Discrete Complex Systems by Fuzzy Logic Controllers,” SSD '09. 6th International Multi-Conference on Systems, Signals and Devices, Djerba, 23-26 March 2009, pp. 1-6. [11] M. Sugeno and K. Murakami, “Fuzzy Parking Control of Model Car,” The 23rd IEEE Conference on Decision and Vol. 15, Control, Vol. 23, 1984, pp. 902-903. [12] T. Takagi and M. Sugeno, “Fuzzy Identification of Sys- tems and Its Applications to Modeling and Control,” IEEE Transactions on Systems, Man and Cybernetics, No. 1, 1985, pp. 116-132. http://dx.doi.org/10.1109/TSMC.1985.6313399 [13] M. I. Park, E. Kim, S. Ji and M. Park, “A New Approach to Fuzzy Modeling,” IEEE Transactions on Fuzzy Sys- tems, Vol. 5, No. 3, 1987, pp. 328-337. [14] D. Jacobson, D. Lele and J. L. Speyer, “New Necessary Conditions of Optimality for Control Problems with Sta- te-Variable Inequality Constraints,” Journal of Mathema- tical Analysis and Applications, Vol. 35, No. 2, 1971, pp. 255-284. http://dx.doi.org/10.1016/0022-247X(71)90219-8 [15] H. Kwakernaak and R. Savan Systems,” Wiley Inter-Science, New York, 1972 , “Linear Optimal Control . eck, “Modelling [16] E. Trélat, “Contrôle Optimal: Théorie et Applications,” Vuibert, Collection Mathématiques Concrètes, Paris, 2005. [17] J. M. Ntaganda, B. Mampassi and D. S Blood Partial Pressures of the Human Cardiovascular/ Respiratory System,” Applied Mathematics and Compu- tation, Vol. 187, No. 2, 2007, pp. 1100-1108. http://dx.doi.org/10.1016/j.amc.2006.09.016
|