M. BLANCO ET AL.
Copyright © 2013 SciRes. ENG
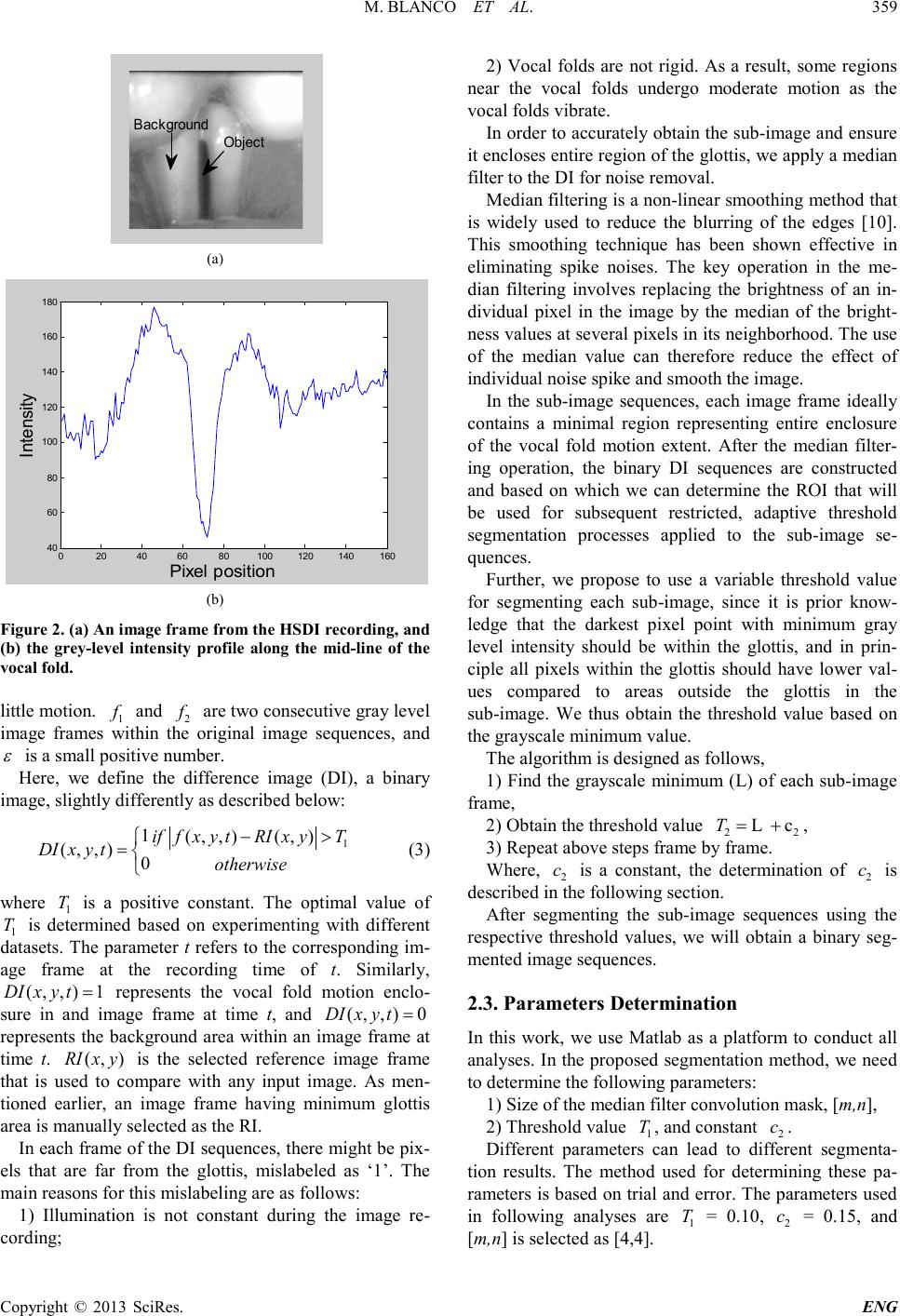
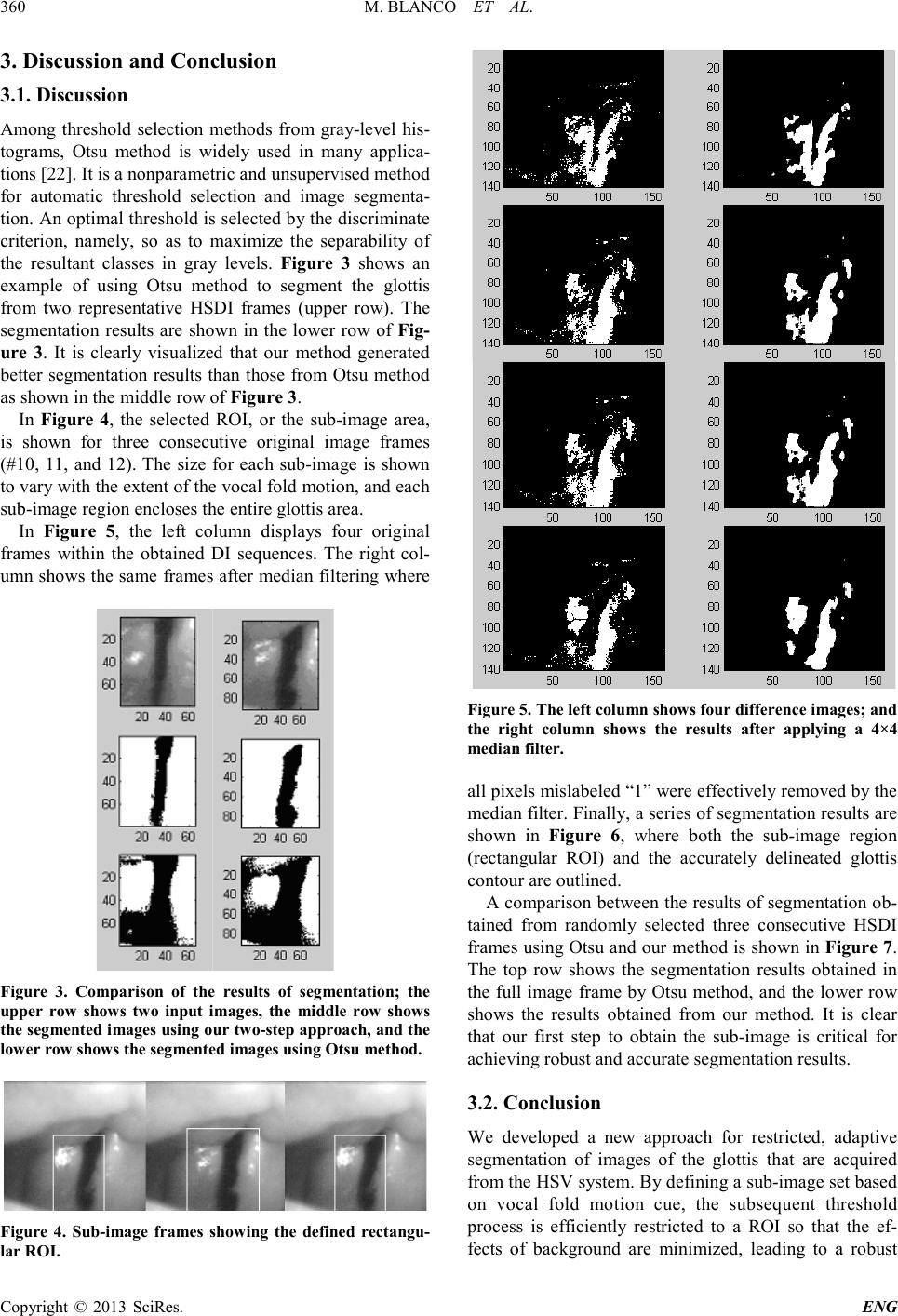
Figure 6. Serial segmentation results: the rectangle marks
the defined ROI within which a restricted thresholding is
performed to delineate the glottis (outlined).
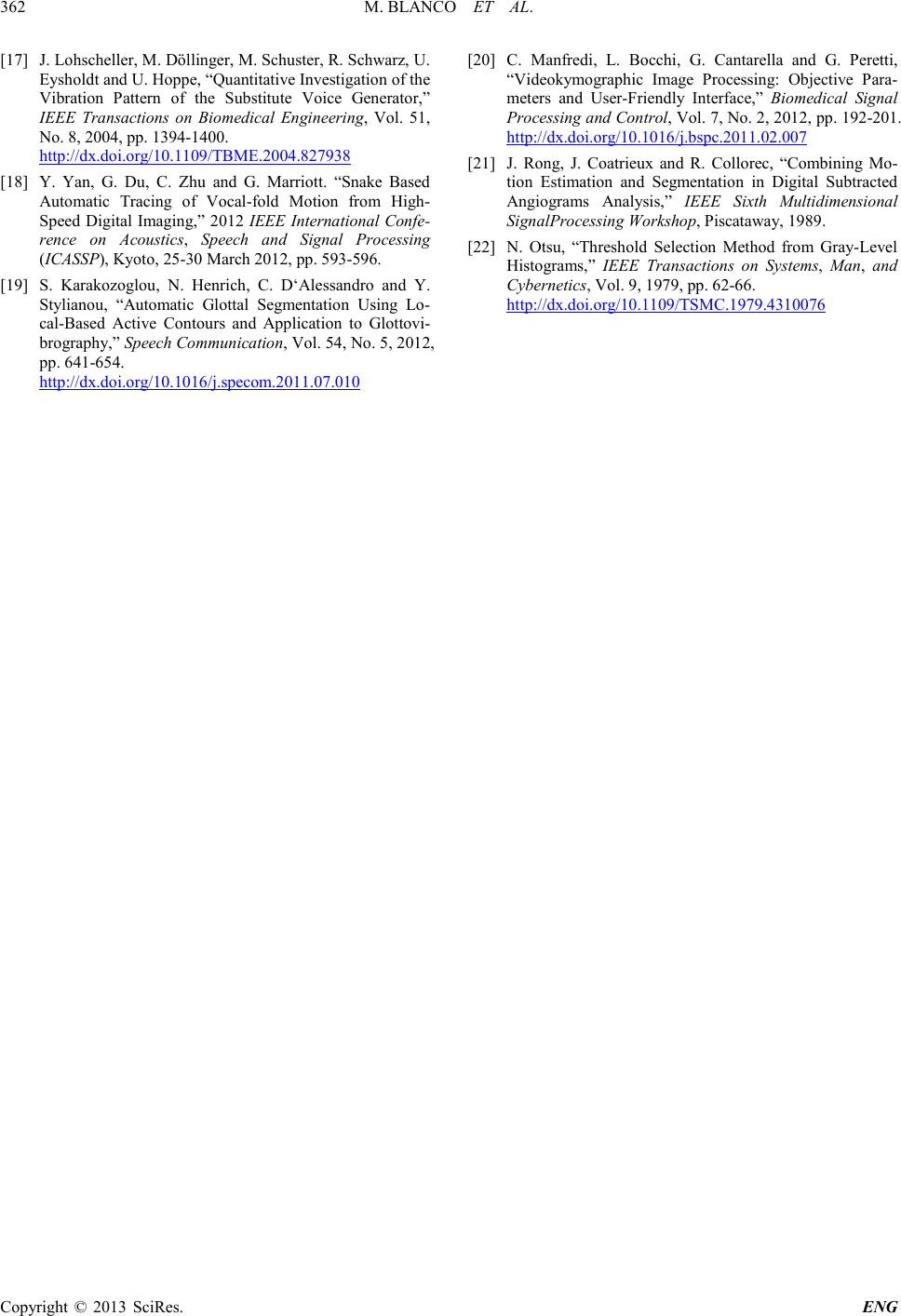
Figure 7. Results of segmentation from direct thresholding
(top r ow) and f r om our algorithm (lower row).
and accurate segmentation outcome. From the segmenta-
tion results obta ined from several c linical HSDI data sets
using the proposed method, we can conclude that our
method is effective and practical for applications in clin-
ical settings.
REFERENCES
[1] R. Timke, H. von Leden and P. Moore, “Laryngeal Vi-
brations: Measurements of the Glottic Wave. Part I: The
Normal Vibratory Cycle,” AMA Archives Otolaryngology,
Vol. 68, 1958, pp. 1-19.
http://dx.doi.org/10.1001/archotol.1958.00730020005001
[2] J. Booth and D. Childers, “Automated Analysis of Ultra
High-Speed Laryngeal Films,” IEEE Transactions on
Biomedical Engineering, Vol. 26, 1979, pp. 18 5-192.
http://dx.doi.org/10.1109/TBME.1979.326556
[3] J. Noordzij and P. Woo, “Glottal Area Waveform Analy-
sis of Benign Vocal Fold Lesions before and after Sur-
gery,” Annals of Otology, Rhinology, and Laryngology,
Vol. 109, 2000, pp. 441-446.
[4] Y. Yan, K. Ahmad, M. Kunduk and D. Bless, “Analysis
of Vocal Fold Vibrations from High-Speed Laryngeal
Images Using a Hilbert Transform-Based Methodology,”
Journal of Voice, Vol. 2, 2005, pp. 161-175.
http://dx.doi.org/10.1016/j.jvoice.2004.04.006
[5] X . Chen, D. Bles s and Y. Yan. “A Segmen tation Scheme
Based on Rayleigh Distribution Model for Extracting
Glottal Waveform from High-speed Laryngeal Images,”
27th Annual International Conference of the Engineering
in Medicine and Biology Society, Shanghai, 17-18 Janu-
ary 2005, pp. 6269-6272.
[6] Y. Yan, D. Bless and X. Chen, “Biomedical Image Anal-
ysis in High-speed Laryngeal Imaging of Voice Produc-
tion,” 27th Annual International Conference of the Engi-
neering in Medicine and Biology Society, Shanghai,
17-18 January 2005, pp. 7684-7687.
[7] K. Ahmad, Y. Yan and D. Bless, “Vocal-Fold Vibratory
Characteristics in Normal Female Speakers from
High-speed Digital Imaging,” Journal of Voice, Vol. 26,
No. 2, 2012, pp. 239-253.
http://dx.doi.org/10.1016/j.jvoice.2011.02.001
[8] K. Ahmad, Y. Yan and D. Bless, “Vocal Fold Vibratory
Characteristics of Healthy Geriatric Females—Analysis
of High-Speed Digital Images,” Journal of Voice, Vol. 26,
No. 6, 2012, pp. 751-759.
http://dx.doi.org/10.1016/j.jvoice.2011.12.002
[9] Y. Yan and K. Izdebski, “Integrated Spatio-Temporal
Analysis of High-Speed Laryngeal Imaging and Abnor-
mal Vo cal F un ction s—Their Role and Applications in the
Study of Normal and Abnormal Vocal Functions,” In: G.
Demenko, Ed., Speech and Language Technology,
Poznan, 2012.
[10] M. Sonka, V. Hlavac and R. Boyle, “Image Processing,
Analysis and Machine Vision,” 3rd Edition, Thomson
Books /C ole, Toro nt o, 20 08, pp. 74-77.
[11] K. Fu and J. Mui, “A Survey on Image Segmentation,”
Pattern Recognition, Vol. 13, No.1, 1981, pp. 3-16.
http://dx.doi.org/10.1016/0031-3203(81)90028-5
[12] M. Atkins and B. Mackiewich, “Fully Automatic Seg-
mentation of the Brain in MRI,” IEEE Transactions on
Medical Imaging, Vol. 17, No. 1, 1998, pp . 98-107.
http://dx.doi.org/10.1109/42.668699
[13] J. Duncan and N. Ayache, “Medical Image Analysis:
Progress Over Two Decades and the Challenges Ahead,”
IEEE Transactions on Pattern Analysis and Machine In-
telligence, Vol . 2 2, 20 00, pp. 85-106.
[14] Y. Yan, X. Chen, and D. Bless, “Automatic Tracing of
Vocal-Fold Motion from High-Speed Digital Images,”
IEEE Transactions on Medical Imaging, Vol. 53, No. 7,
2006, pp . 1394-1400.
http://dx.doi.org/10.1109/TBME.2006.873751
[15] J. Lohscheller, H. Toy, F. Rosanowski, U. Eysholdt and
M. Döllinger, “Clinically Evaluated Procedure for the
Reconstruction of Vocal Fold Vibrations from Endoscop-
ic Digital High-Speed Videos,” Medical Image Analysis,
Vol. 11, No. 4, 2007, pp. 400-413.
http://dx.doi.org/10.1016/j.media.2007.04.005
[16] B. Marendic, N. Galats ano s and D. Bless, “A N e w Acti v e
Contour Algorithm for Tracking Vibrating Vocal Folds,”
IEEE International Conference on Image Processing,
2001, pp . 397-400.