N. T. HAI ET AL.
Copyright © 2013 SciRes. ENG
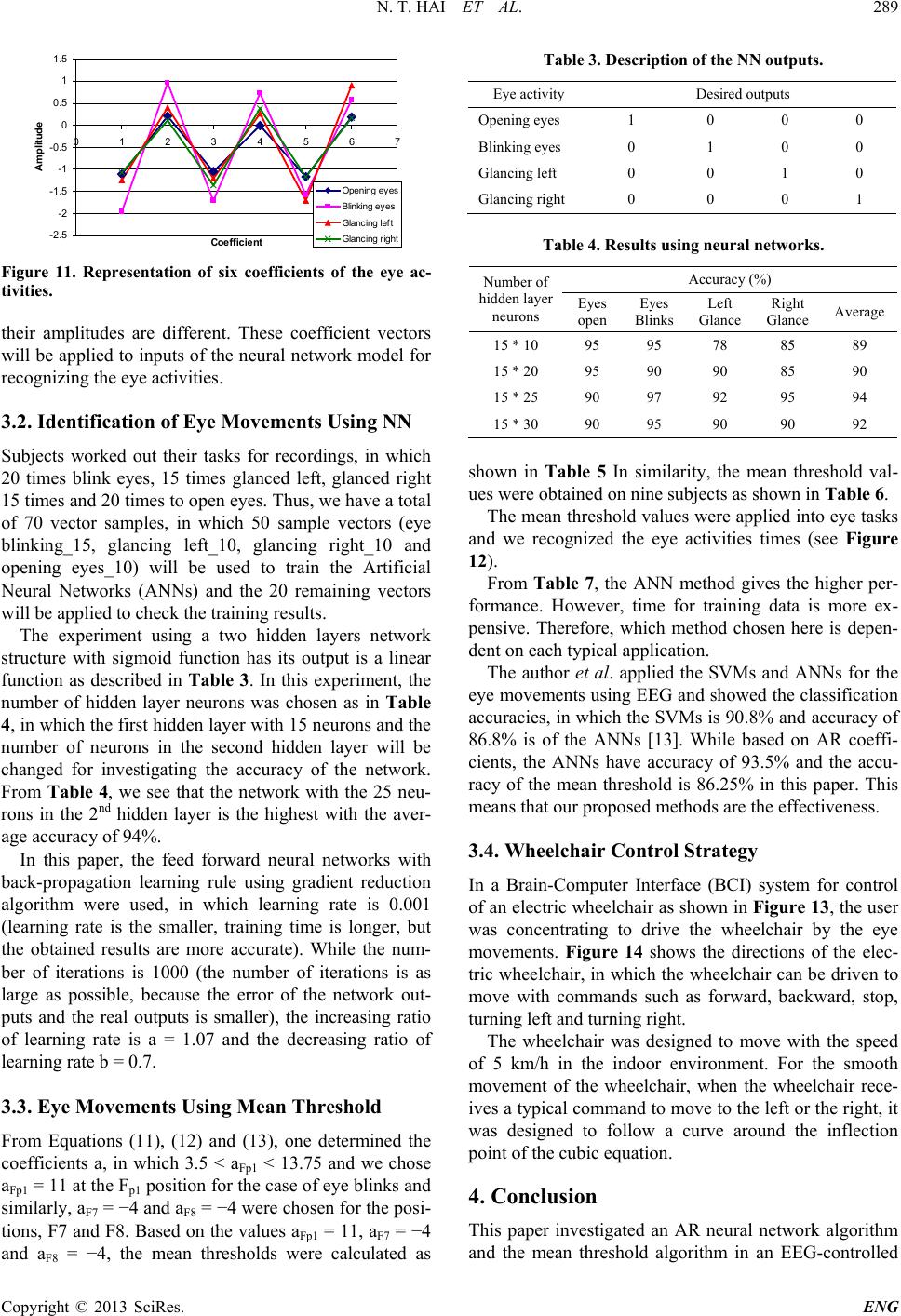
Figure 13. A user is controlling the wheelchair.
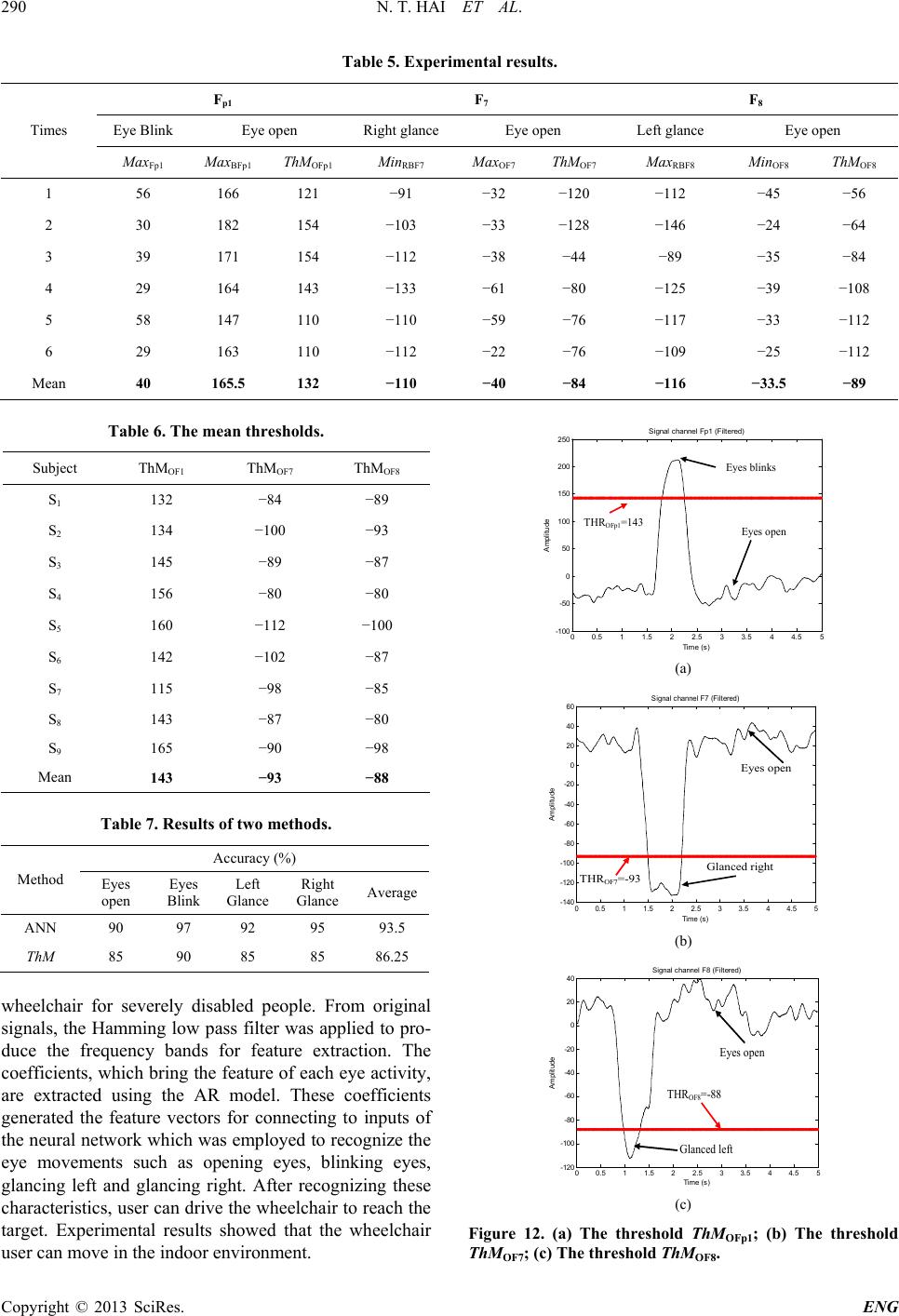
Figure 14. The directions of the wheelchair motion.
5. Acknowledgements
We would like to thank Vietnam National University in
Ho Chi Minh City for supporting research grant No.
C2013-28-06. Furthermore research was partly supported
by a research fund from International University in Ho
Chi Minh City. Finally, an honorable mention goes to our
volunteers and colleagues for supports on us in complet-
ing this project.
REFERENCES
[1] J. Wolpaw, N. Birbaumer, D. McFarland, G. Pfurtschel-
lere and T. Vaughan, “Brain-Computer Interfaces for
Communication and Control,” Clinical Neurophysiology,
2002, pp. 767-791.
http://dx.doi.org/10.1016/S1388-2457(02)00057-3
[2] N. Ince, F. Goksu, A. Tewfik and S. Arica, “Adapting
Subject Specific Motor Imagery EEG Patterns in Space-
Time-Frequency for a Brain Computer Interface,” Bio-
medical Signal Processing and Control, 2009, pp. 236-
246. http://dx.doi.org/10.1016/j.bspc.2009.03.005
[3] N. Weiskopf, F. Scharnowski, R. Veit, R. Goebel, N.
Birbaumer and K. Mathiak, “Self-Regulation of Local
Brain Activity Using Real-Time Functional Magnetic
Resonance Imaging (fMRI),” Journal of Physiology,
2004, pp. 357-373.
[4] S. Lloyd-Fox, A. Blasi and ElwellCE, “Illuminating the
Developing Brain: The Past, Present and Future of Func-
tional Near Infrared Spectroscopy,” Neuroscience-Bio-
behavioral, 2010, pp. 269-284.
[5] G. E. Fabiani, D. J. McFarland, J. R. Wolpaw and G.
Pfurtscheller, “Conversion of EEG Activity into Cursor
Movement by a Brain-Computer Interface,” Transactions
on Neural Systems and Rehabilitation Engineering, Vol.
12, pp. 331-338.
http://dx.doi.org/10.1109/TNSRE.2004.834627
[6] C. Guger, W. Harkam, C. Hertnaes and G. Pfurtscheller,
“Prosthetic Control by an EEG-Based Brain-Computer
Interface (BCI),” IEEE Transactions on Robotics, Vol. 21,
2005.
[7] D. J. Krusienski and J. J. Shih, “A Case Study on the
Relation between Electroencephalographic and Electro-
corticographic Event-Related Potentials,” 32nd Annual
International Conference of the IEEE EMBS, 2010.
[8] D. J. McFarland and J. R. Wolpaw, “EEG-Based Com-
munication and Control: Speed-Accuracy Relationships,”
Applied Psychophysiology and Biofeedback, Vol. 28,
2003, pp. 217-231.
http://dx.doi.org/10.1023/A:1024685214655
[9] B. Blankertz, G. Dornhege, M. Krauledat, K.-R. Müller,
V. Kunzmann, F. Losch and G. Curio, “The Berlin Brain-
Computer Interface: EEG-Based Communication Without
Subject Training,” IEEE Transactions on Neural Systems
and Rehabilitation Engineering, Vol. 14, 2006, pp. 147-
152. http://dx.doi.org/10.1109/TNSRE.2006.875557
[10] X. Gao, D. Xu, M. Cheng and S. Gao, “A BCI-Based
Environmental Controller for the Motion-Disabled,” IEEE
Transactions on Neural Systems and Rehabilitation En-
gineering, Vol. 11, 2003, pp. 137-140.
http://dx.doi.org/10.1109/TNSRE.2003.814449
[11] K. S. Ahmed, “Wheelchair Movement Control VIA Hu-
man Eye Blinks,” American Journal of Biomedical Engi-
neering, Vol. 1, 2011, pp. 55-58.
[12] T. Q. D. Khoa and M. Nakagawa, “Functional Near
Infrared Spectroscope for Cognition Brain Tasks by
Wavelets Analysis and Neural Networks,” International
Journal of Biological and Life Sciences, Vol. 4, 2008, pp.
28-33.
[13] R. Singla, B. Chambayil, A. Khosla and J. Santosh,
“Comparison of SVM and ANN for Classification of Eye
Events in EEG,” Journal of Biomedical Science and En-
gineering, Vol. 4, 2011, pp. 62-69.
[14] S. Chabaa, A. Zeroual and J. Antari, “Identification and
Prediction of Internet Traffic Using Artificial Neural
Networks,” Intelligent Systems & Applications, Vol. 2,
2010, pp. 147-155.
http://dx.doi.org/10.4236/jilsa.2010.23018
[15] N.-J. Huan and R. Palaniappan, “Neural Network Clas-
sification of Autoregressive Features from Electroence-
phalogram Signals for Brain-Computer Interface Design,”
Journal of Neural Engineering, Vol. 1, 2004, pp. 142-150.
http://dx.doi.org/10.1088/1741-2560/1/3/003