Energy and Power Engineering, 2013, 5, 657-660
doi:10.4236/epe.2013.54B127 Published Online July 2013 (http://www.scirp.org/journal/epe)
Research on Con t rol Strategy of 2 - p h a s e
Interleaving Magnetic Integrated VRM
Rui Guo1,2, Con g Wang 1,Yugang Yang2
1School of Mechanical Electronic & Information Engineering, China University of Mining & Technology, Beijing, China
2Faculty of Electrical and Control Engineering, Liaoning Technical University, Huludao, Liaoning, China
Email: 13591991002@163.com
Received February, 2013
ABSTRACT
A kind of 2-phase interleaving coupled magnetic integrated VRM is studied and the corresponding passivity-based con-
trol strategy is put forward. The model of this kind of magnetic integrated VRM is constructed, and the performance of
this 2-phase interleaving magnetic integrated VRM of passivity-based control is verified by simulation experiments.
The results proved that this kind of passivity-based control strategy can decrease the steady state current ripple and the
dynamic output voltage under load disturbance.
Keywords: VRM; Magnetic Integrated; Interleaving; Coupled Inductors
1. Introduction
Nowadays, the topology used in VRM is mostly multi-
phase interleaving Buck converter, in which the magnetic
components have important effect on the performance of
VRM. In order to increase the power density and effi-
ciency of VRM, the magnetic integration technology is
applied to it [1-3]. However, each phase winding of the
multi-phase magnetic integrated VRM has a self induc-
tance, meanwhile, it can form coupled magnetic circuit
with the other phase windings. Therefore, it is difficult to
construct the model of VRM and the traditional linear
control methods can not meet the demand of the per-
formance [4]. A kind of 2-phase negative coupling mag-
netic integrated VRM is studied in this paper and its cir-
cuit model is constructed using linear system control
theory, what’s more, the corresponding nonlinear passiv-
ity-based control strategy is put forward to realize the
equality of each phase current and to improve the dy-
namic performance of VRM.
2. Model Building of 2-phase Interleaving
Magnetic Integrated VRM
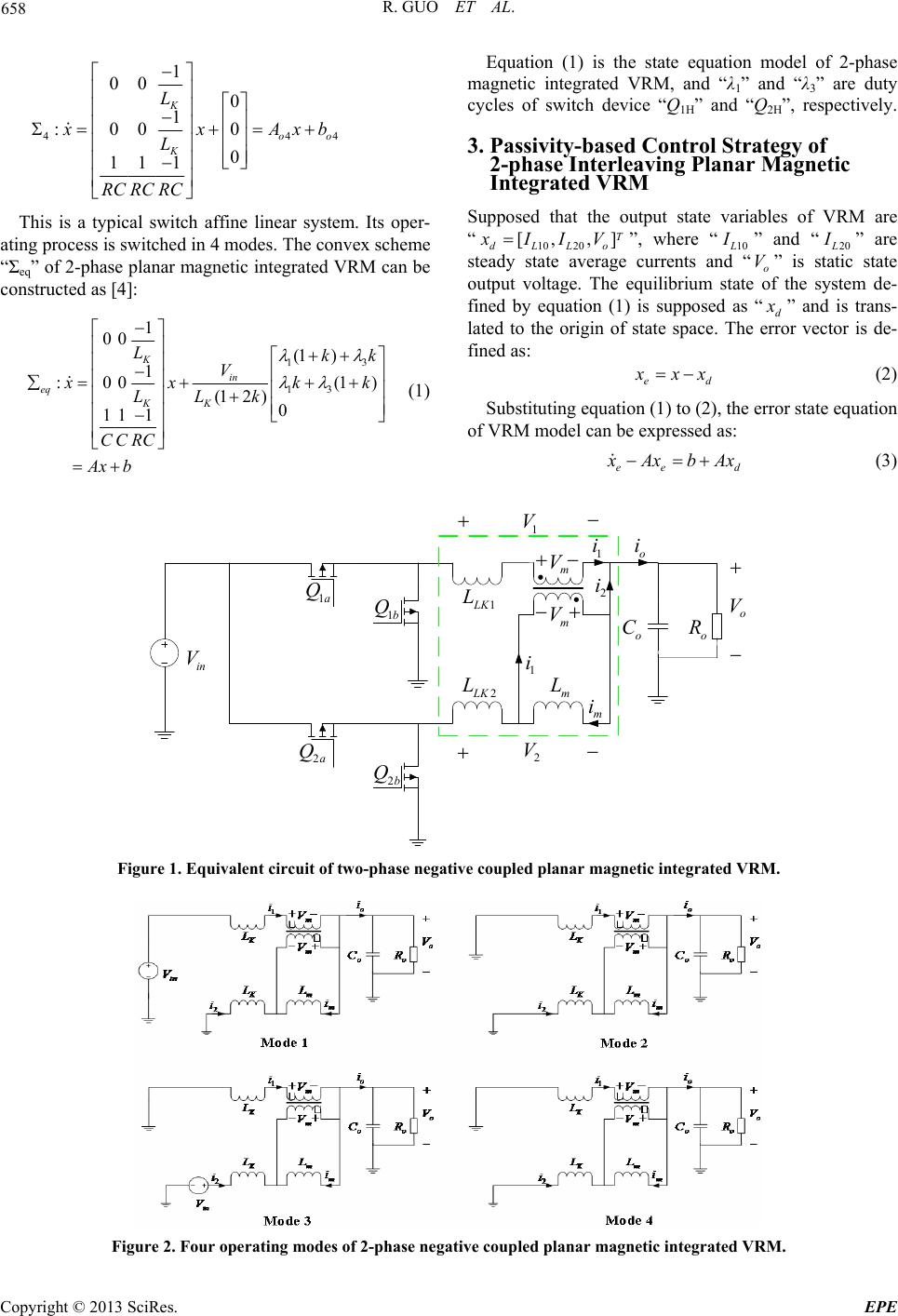
The model of 2-phase interleaving negative coupled
magnetic integrated VRM is shown in Figure 1. There
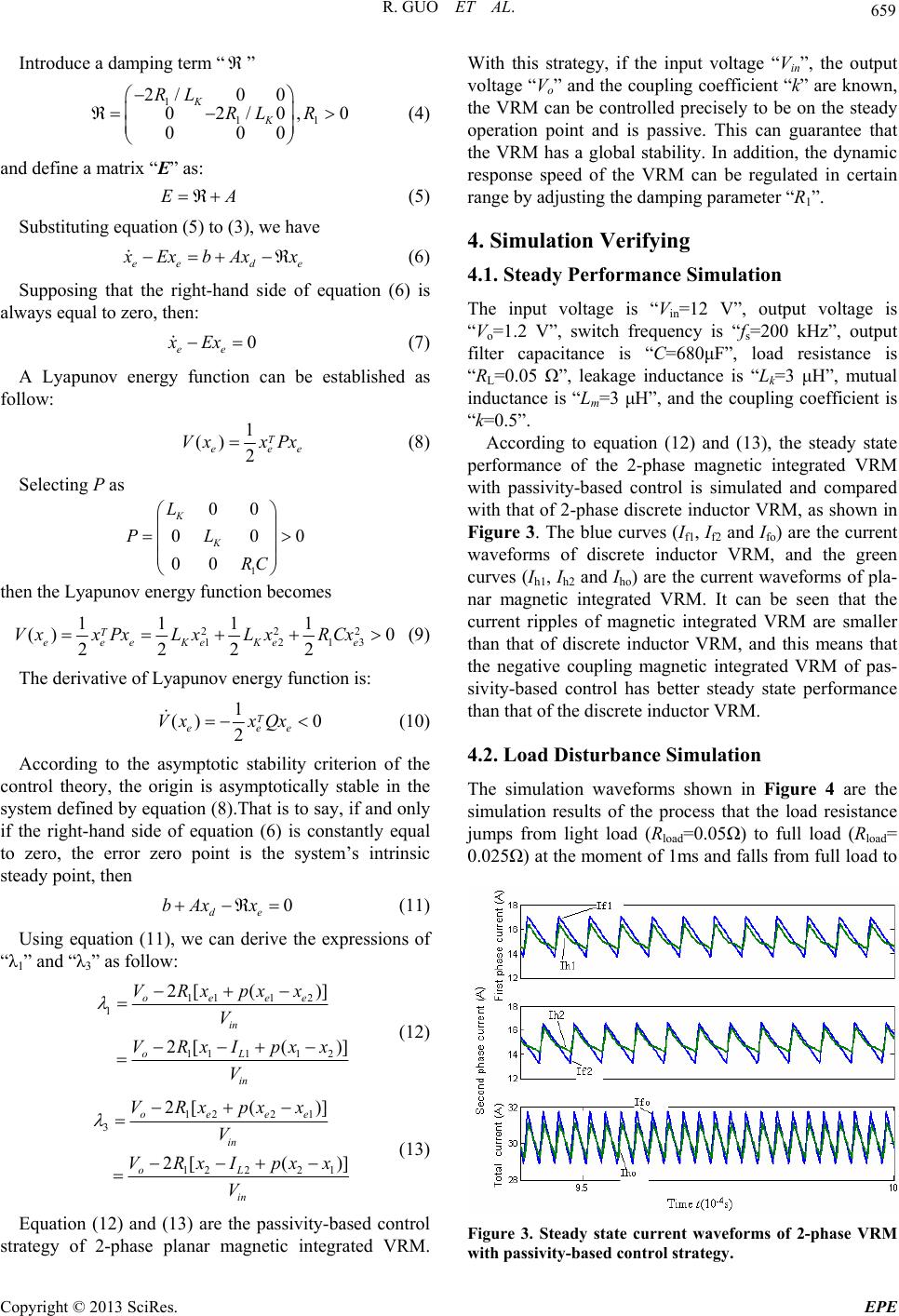
are 4 operation modes in each switch cycle, and the cor-
responding equivalent circuits are shown in Figure 2.
Supposed that VRM operates in the mode of continu-
ous current, and the 4 operating modes of VRM are de-
fined as “Σ1”, “Σ2”, “Σ3” and “Σ4”. The state variables are
selected as
123
T
x
xx, where “x1” and “x3” are cur-
rents “i1” and “i2”, “x3” is voltage “uc” , “Lk” is leakage
inductance, “k” is coupling coefficient, and “R” is the
load resistance. The models of the 4 modes “Σ1”, “Σ2”,
“Σ3” and “Σ4” are as follow:
11
22
3
1
00
1
1
:00 0
(12 )0
11 1
1
00
0
1
:00 0
0
11 1
1
00
1
:00
11 1
K
in
oo
KK
K
oo
K
K
in
KK
Lk
V
1
2
xA
LLk
RC RC RC
L
xxAxb
L
RC RCRC
L
V
xx
LL
RC RCRC
xb
33
0
1
(12 )0
oo
kAxb
k
*Sponsor: National Natural Science Foundation of China (No.
51177067 and No. 51077125)
Copyright © 2013 SciRes. EPE