Y. YANG ET AL.
590
model and spherical model. By using the Newton itera-
tion method to solve the nonlinear equations set up based
on the locating model, the precise locating of PD source
is achieved. The study shows that by using the above-
mentioned method, the locating precision is largely af-
fected by the estimated TDOA, in a non-linear manner.
In order to improve the precision of calculation of TDOA,
the sampling frequency of the digital instruments should
be very high, leading to high cost of locating system.
Moreover, the effect is especially satisfactory when de-
tecting the signals from a single set of equipment within
a short distance. However, when PD source is distant
away from the UHF sensor, the error of TDOA is still
large even with over sampling equipment. The vehi-
cle-mounted on-line monitoring and locating system of
PD is characterized by mobility, making it possible to
proceed along the route of inspection and stay close to
the power equipment to be detected. Based on this fea-
ture, this study puts forward the PD locating method us-
ing two-dimensional hyperbolic locating model (see
Figure 1). Compared with the three-dimensional locating
model, this method only determines the bearing of PD
source relative to the array of sensors, achieving low
precision of TDOA calculation. After using the location
algorithm for the power equipments suspected of PD,
other portable devices for PD detection could also be
used for further detection and precise location. The spe-
cific location model is as follows:
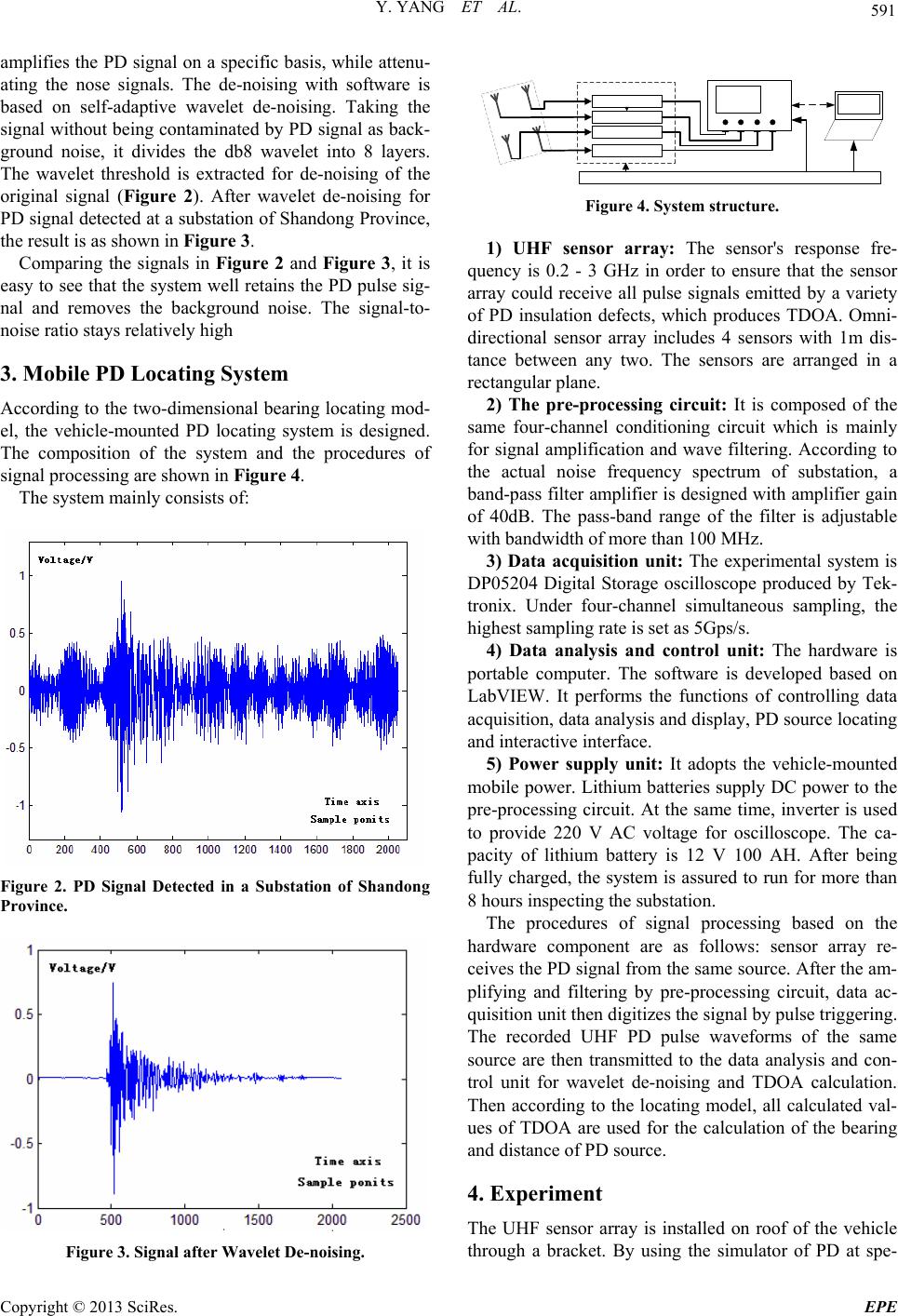
In order to obtain the bearing of PD source, only the
coordinates of X axis and Y axis are required. In the
two-dimensional hyperbolic locating model, it is as-
sumed that the power equipment and the UHF sensors
are in the same plane. As Figure 1 shows, P (x, y) is
taken as the position of PD source and the UHF sensor is
located at i or j (i, j=1,2,3,4). The distance from P, the
1
.
Locating algorithm diagram (top view).
Figure 1. Locating algorithm diagram (top view).
PD source, and the sensor is di, dj. In the process of PD
detection, TDOA at the UHF sensor receiving the UHF
PD signals can be calculated. Assuming the transmission
velocity is constant (velocity of light), the difference of
distance di-dj could be obtained. By making one differ-
ence constant (for example, d1 - d2 is constant, see Equa-
tion (1)), a unique single-branch hyperbolic curve could
be determined. According to the TDOA detected by dif-
ferent arrays of sensors (one array consists of any two
UHF sensors), different single-branch hyperbolic curves
are obtained. Any two single-branch hyperbolic curves,
as shown in Figure 1, could form binary quadratic equa-
tions as Equation (1). Then the two-dimensional coordi-
nates of PD source could be obtained by analytical solu-
tion. By means of coordinate transformation, the bearing
and the radial distance could be known. The six inde-
pendent delta-T calculated from antenna array can de-
termine the quadrant where PD happens. So the other
wrong intersections can be eliminated. Such as, if PD
source discharges in Quadrant I,dealt-T21(which means
T2-T1) must be negative.
(1)
where aij=(di-dj)/2 is length of semi-major axis;
bij2= cij2- aij2 is the square of the length of semi-minor
axis; cij is the focal distance of hyperbola, determined by
the size of antenna array
2.2. Arrival Time Difference Calculation
In the hyperbolic locating model, it can be seen that the
detection method of bearing of PD source is directly
based on TDOA of UHF PD signals. The error of the
calculated TDOA will inevitably affect the precision of
location. The System uses the cross-correlation algorithm
to estimate TDOA [7]. In the calculation of TDOA, it is
assumed that the sampling rate of locating system is
5Gps/s, which means that there is a deviation of sam-
pling interval. As a result, the error of the estimated
TDOA is ±0.2 ns. . When the noise level is high, espe-
cially when the peaks of PD signal are close, the TDOA
calculated by the cross-correlation algorithm will be af-
fected. The PD signal is the pulse signal with short PD
duration. When the noise signal of the wave front and
wave tail is large, mistaken translation points may occur,
leading to maximal correlation coefficient. In order to
obtain a relatively precise TDOA, the system adopts the
strategy of combining hardware filtering with software
de-noising. The hardware filtering is accomplished by
the front-end conditioning circuit. The purpose is to en-
able the sampling system to acquire PD signal during a
single collection task. The front-end conditioning circuit
Copyright © 2013 SciRes. EPE