Y. B. LI ET AL.
Copyright © 2013 SciRes. ENG
which are also usually used in continuous BP measure-
ment systems [11,12,14]. The PPG signal is caused only
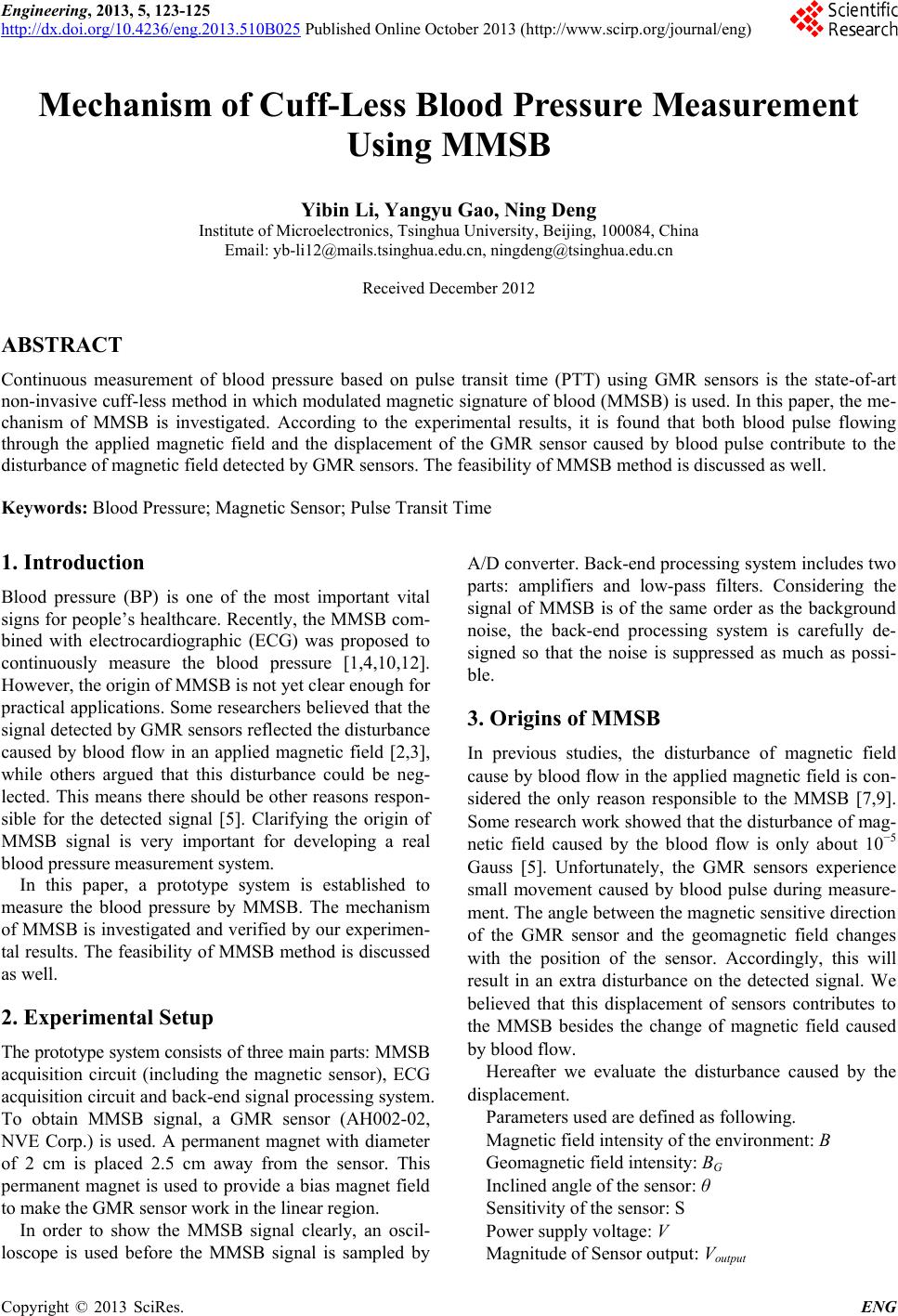
by the changes of blood flow. The MMSB signal should
have a similar shape as Figure 2’s signal if MMSB is
also caused only by blood flow under the magnetic sen-
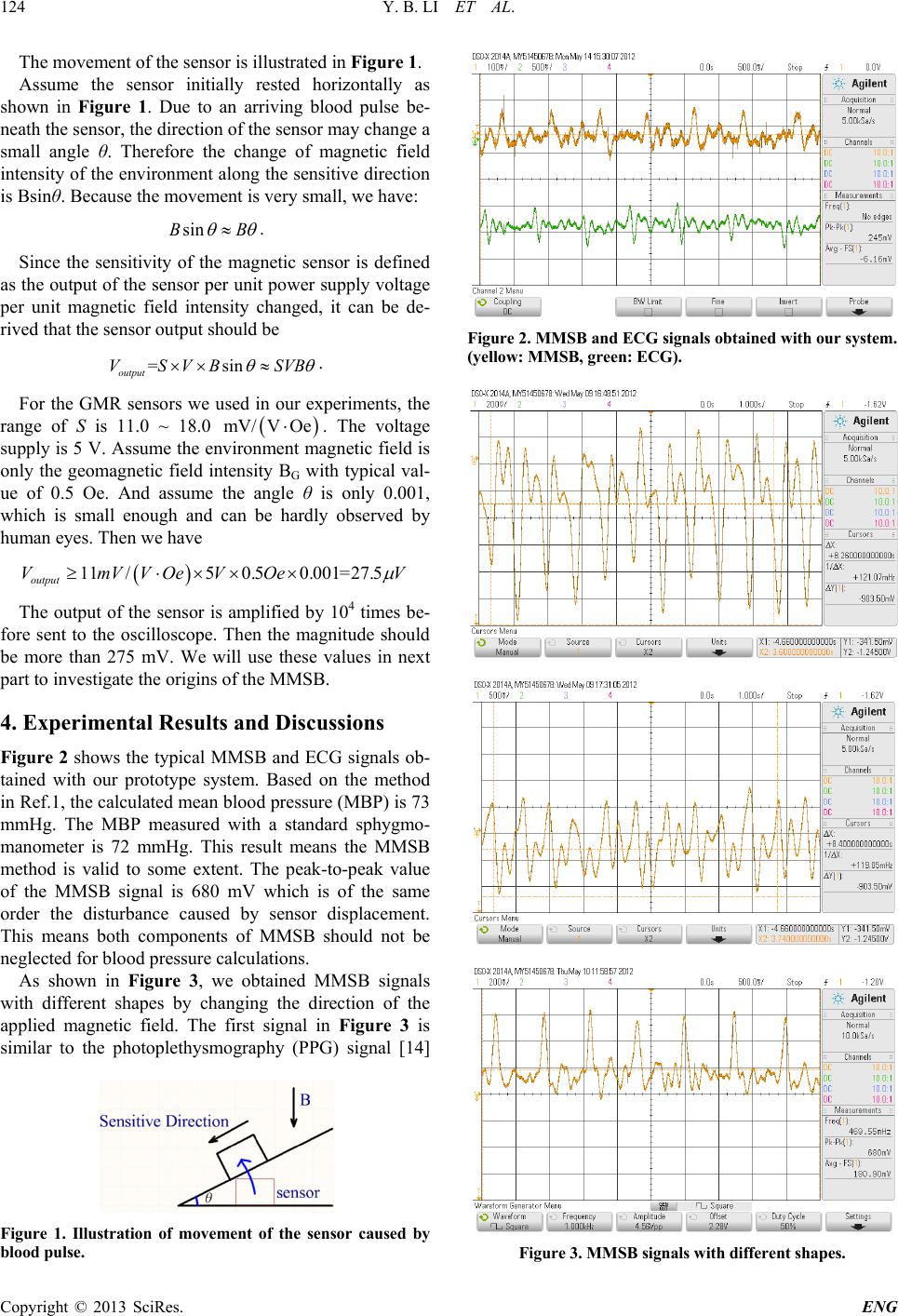
sor like the case of first signal. Now the question is: why
did we obtain MMSB signals with deferent shapes? The
only reasonable explanation is that the both origins we
mentioned above contribute to the MMSB at the same
time. Which kind of shape we would get is determined
by the competition of the two components. The meanings
of the different shapes will be studied in other papers.
PTT is usually defined as the time delay between the
peak of the R wave of the ECG waveform and the up-
stroke of a peripheral pulse wave signal [1]. The output
of magnetic sensor due to the position variation makes
the measurement much more complicated. It seems that
this will cast a shadow on the feasibility of applying
MMSB on bloo d pre ssure measurement. Fortunately, this
is not the case. Although both origins will contribute to
the MMSB signals, the MMSB will be still highly related
to blood pressure. The only negative effect is the MMSB
signal could be too small to be detected if these two me-
chanisms lead to opposite change of the detected mag-
netic field. As a result, to improve the feasibility and
reliability of the measurement, shielding the geomagnetic
field is an effective solution.
5. Conclusion
In this paper, origin of the MMSB is investigated. We
confirm that the MMSB signal consists of two compo-
nents based on experimental results. One is from change
of the blood flow in the applied magnetic field. The other
is from the sensor displacement caused by the blood
pulse. According to our study, the MMSB method is still
feasible for blood pressure measurement. A method to
improve the feasibility and reliability of the measurement
is proposed as well.
REFERENCES
[1] C. T. Phua and G. Lissorgues, “Measurement of Blood
Pressure Using Magnetic Method of Blood Pulse Acqui-
sition,” Proceedings of the 2009 IEEE 3rd International
Conference on Nano/Molecular Medicine and Engineer-
ing, October 2009, Taiwan, pp. 112-115.
[2] C. T. Phua, G. Lissorgues and B.Mercier, “Non-Invasive
Acquisition of Blood Pulse using Magnetic Disturbance
Technique,” Proceedings 23rd International Confe- rence
of Biomedical Engineering (ICBME), 2008, pp. 786-789.
[3] J. Joseph, J. Venkataraman, V. Jagadeesh Kumar and S.
Suresh, “Non-Invasive Estimation of Arterial Compli-
ance,” IEEE International Instrumentation & Measure-
ment Technology Conference (I2MTC), 2011, pp. 480-
484.
[4] J. Joseph and V. Jay ashankar, “Magnetic Sensor for Non-
Invasive Detection of Blood Pulse and Estimation of Ar-
terial Compliance,” 2010 IEEE EMBS Conference on
Biomedical Engineering & Sciences (IECBES 2010), 30
November-2 December 2010, Kuala Lumpur, Malaysia,
pp. 170-175.
[5] F. L. Sinatra, “Understanding the Interaction between
Blood Flow and an Applied Magnetic Field,” University
of South Florida, 2010.
[6] J. Joseph, V. Jayashankar and K. V. Jagadeesh, “A PC
Based System for Non-Invasive Measurement of Carotid
Artery Compliance,” 2009 IEEE Instrumentation & Meas-
urement Technology Conference, Singapore, May 2009,
pp. 656-661.
[7] C. T. Phua and G. Lissorgues, “Modeling of Pulsatile
Blood Flow in a Weak Magne tic Field,” Engineering and
Technology, World Academy of Science, Vol. 54, 2009
pp. 73-76.
[8] P. C. Teck, Lissorgues, “Non-Invasive Measurement of
Blood Flow Using Magnetic Disturbance Method”,
Gaelle 2009 International Conference on Biamedical and
Pharmaceutical Engineering, pp. 80-83.
[9] J. Labadin and A. Ahmadi, “Mathematical Modeling of
the Arterial Blood Flow,” Proceedings of the 2nd IMT-
GT Regional Conference on Mathematics, Statistics and
Applications, University Sains Malaysia, Penang, June
2006, pp. 222-226.
[10] H. Gesche, D. Grosskurth, G. Kuechler and A. Patzak,
“Continuous Blood Pressure Measurement by Using the
Pulse Transit Time: Comparison to a Cuff-Ba se d Method,”
European Journal of Applied Physiology, Vol. 112, No. 1,
2012, pp. 309-315.
http://dx.doi.org/10.1007/s00421-011-1983-3
[11] W. Chen, T. Kobayashi, S. Lchikawa, Y. Takeuchi and T.
Togawa, “Continuous Estimation of Systolic Blood Pres-
sure Using the Pulse Arrival Time and Intermittent Cali-
bration,” Medical & Biological Engineering & Compu-
ting, Vol. 38, 2000, pp. 569-574.
http://dx.doi.org/10.1007/BF02345755
[12] L. A. Geddes, M. H. Voelz, C. E. Babb s and W. A. Tacker,
“Pulse Transit Time as an Indicator of Arterial Blood
Pressure,” Psychophysiology, Vol. 18, 1981, pp. 71-74.
http://dx.doi.org/10.1111/j.1469-8986.1981.tb01545.x
[13] J. S. Ki m, Y. J. Chee, J. W. Park, J. W. Choi and K. Suk
Park, “A New Approach for Non-Invasive Monitoring or
Blood Pressure on a Toilet Seat,” Physiol.Means, Vol. 27,
2006, pp. 211-230.
[14] Y. Yoon, J. H. Cho and G. Yoon, “Non-Constrained
Blood Pressure Monitoring Using ECG and PPG for Per-
sonal Healthcare,” Journal of Medicine System, Vol. 33,
2009, pp. 261-266.
http://dx.doi.org/10.1007/s10916-008-9186-0