American Journal of Computational Mathematics, 2013, 3, 7-12
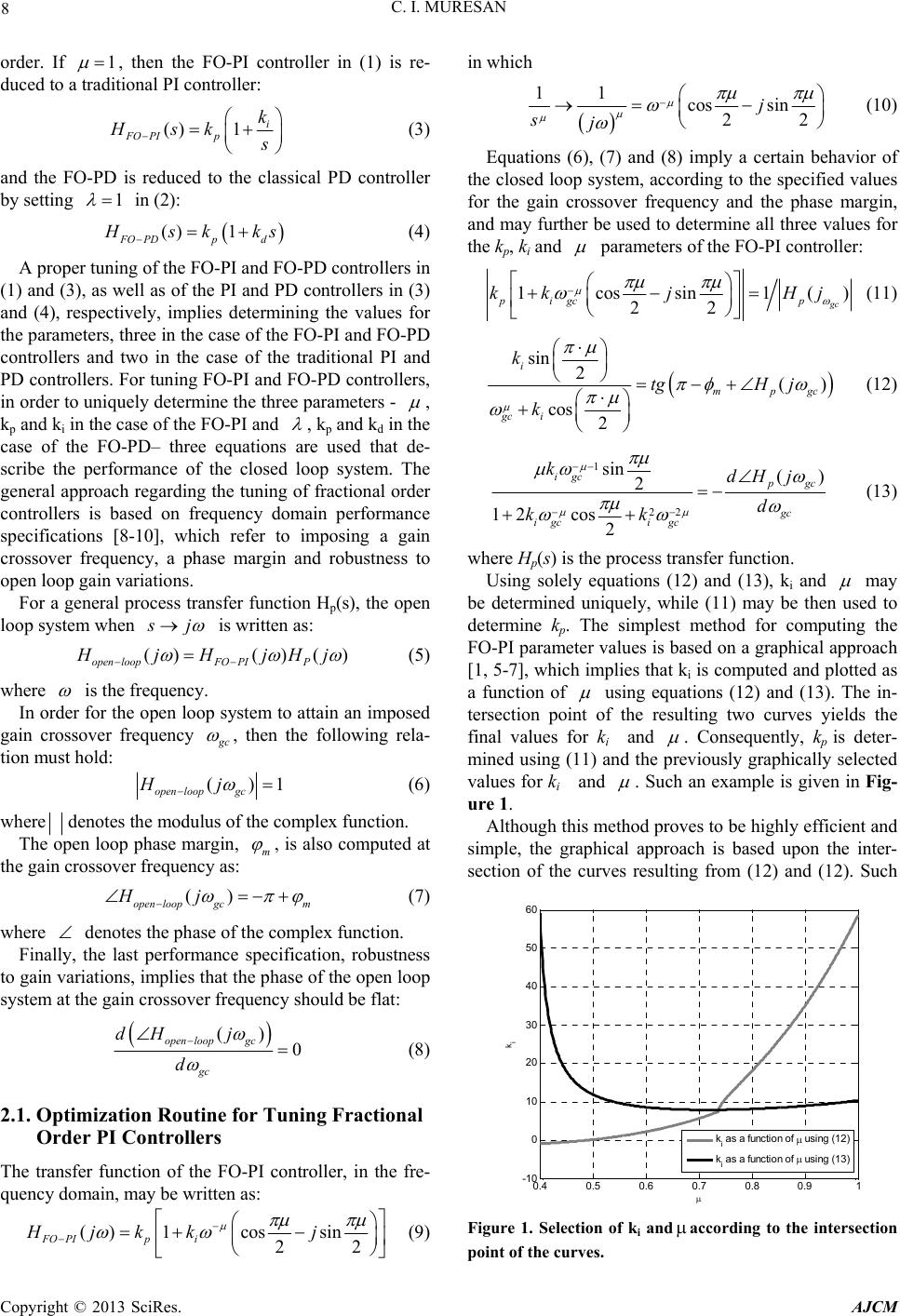
doi:10.4236/ajcm.2013.33B002 Published Online September 2013 (http://www.scirp.org/journal/ajcm)
Simplified Optimization Routine for Tuning Robust
Fractional Order Controllers
Cristina I. Muresan
Department of Automation, Faculty of Automation and Computer Science, Technical, University of Cluj-Napoca, Romania
Email: Cristina.Pop@aut.utcluj.ro
Received June, 2013
ABSTRACT
Fractional order controllers have been used intensively over the last decades in controlling different types of processes.
The main methods for tuning such controllers are based on a frequency domain approach followed by optimization rou-
tine, generally in the form of the Matlab fminsearch, but also evolving to more complex routines, such as the genetic
algorithms. An alternative to these time consuming optimization routines, a simple graphical method has been proposed.
However, these graphical methods are not suitable for all combinations of the imposed performance specifications. To
preserve their simplicity, but also to make these graphical methods generally applicable, a modified graphical method
using a very straightforward and simple optimization routine is proposed within the paper. Two case studies are pre-
sented, for tuning fractional order PI and PD controllers.
Keywords: Fractional Order Controllers; Graphical Tuning; Simplified Optimization Routine
1. Introduction
Fractional order PIDs (FO-PIDs) have been employed in
various engineering fields ranging applications in a wide
variety of domains. The fractional order PID controller is
in fact a generalization of the classical integer order PID.
In the fractional order PID control algorithm, the error
signal is integrated and differentiated to any order, rather
than to an integer order as with the traditional PIDs. The
fractional order PIDs have two supplementary parame-
ters compared to the traditional PIDs. It is for this reason,
that the fractional order PIDs have the potential to meet
more design specifications than the traditional PIDs and
hence to increase the performance and robustness of
closed loop systems [1-4]. A couple of interesting meth-
ods have been proposed for tuning such FO-PIDs with
the great majority centered upon Matlab’s fminsearch or
graphical approaches [1, 5-7]. The current trend nowa-
days is directed to the latter methods, since they require
less computational and time resources. Nevertheless, if
no exact solution exists, the current graphical methods
fail at the tuning of the FO-PID controller.
The purpose of this paper is to design an improved
graphical method for tuning FO-PI and FO-PD control-
lers, based upon an optimization routine that selects the
best possible tuning option even in the case of no exact
solution. For exemplification, two case studies are con-
sidered. The first case study implies the design of FO-PI
control for a simple first order process. The second case
study consists in the design of a FO-PD controller for a
second order process with integrator effect. Simulation
results in both case studies show that the fractional order
controllers tuned using the proposed algorithm can meet
all performance specifications. To exemplify the opti-
mized graphical methods for tuning fractional order con-
trollers, the first case study has no exact solution, while
the second case study has an exact solution.
The paper is organized as follows. Section 2 contains
the main contribution of the present paper, with a de-
scription of the fractional order PI and PD optimized
graphical tuning algorithms, while Section 3 presents the
two case studies. The final section contains the conclud-
ing remarks.
2. Optimization Routine for Tuning
Fractional Order Controllers
The transfer function of the fractional order PI (FO-PI)
controller is given by:
()1 i
FO PIp
k
Hsk
(1)
while the transfer function for the fractional order PD
(FO-PD) controller is given by:
() 1
FO PDpd
sk ks
(2)
where kp, ki and kd are the proportional, integral and de-
rivative gains and
and
are the fractional
Copyright © 2013 SciRes. AJCM