Development of a Client-Server System for 3D Scene Change Detection
18
mations including rotation, translation, and scaling.
Our system chooses Lin’s algorithm as our image
processing algorithm on the server side, the details will
be introduced in next section.
3. System Overview
3.1. Change Detection Algorithm
We use Lin’s method to detection change in the server
side. In their algorithm, temporal changes are detected by
using 3D scene geometry at time A (reference) and the
image of the same scene at time B (query). To quickly
detect changes and visualize them for operators at a
regular observation, the method uses 3D-2D matching
between a 3D reference scene and 2D query images fol-
lowed by 2D-2D feature comparison between 2D training
and query images, which is superior to either of 3D-3D
or 2D-2D matching.
In the case of 3D-3D matching [3,9,10], two 3D
scenes are registered for change detection. This may be
able to provide a detail comparison between reference
and query 3D scenes, however, this approach is not suit-
able because 1) online and real-time 3D reconstruction is
very difficult and still a challenging problem, and 2) a 3D
laser range finder is not easy to handle at the places of
our task because of its heavy weight and the need of
electric power. In the case of 2D-2D matching [11-13],
images (or videos) taken by a fixed camera are compared
to detect changes, or more commonly, moving objects.
This approach is also not appropriate for the detection
purpose: a number of fixed cameras are needed to cover
the whole scene of the observed place, hence, it is im-
practical if in particular the scene is wide and large. If the
scene is observed by a hand-held camera for taking a
number of 2D images, the problem above may not arise.
However, reference and query 2D images are very diffi-
cult to register unless they have a large overlapping area
in each pair of the images.
In contrast, Lin’s approach uses the combination of
3D-3D and 2D-2D matching. Assume that 3D scene
geometry is given but only at time A as a reference 3D
scene, hence no 3D range finder is necessary. At time B
(query), a hand-held camera is used to take images of the
same scene, and the reference 3D geometry is used for
3D-2D matching for camera pose estimation. This en-
ables us to perform a robust 3D-2D matching.
3.2. Model Overview
In order to develop a client-server 3D scene change de-
tection system, we choose an android based tablet device
as a client for image acquisition and result visualization
in our system. We implement a client application which
can communicate with a server through network connec-
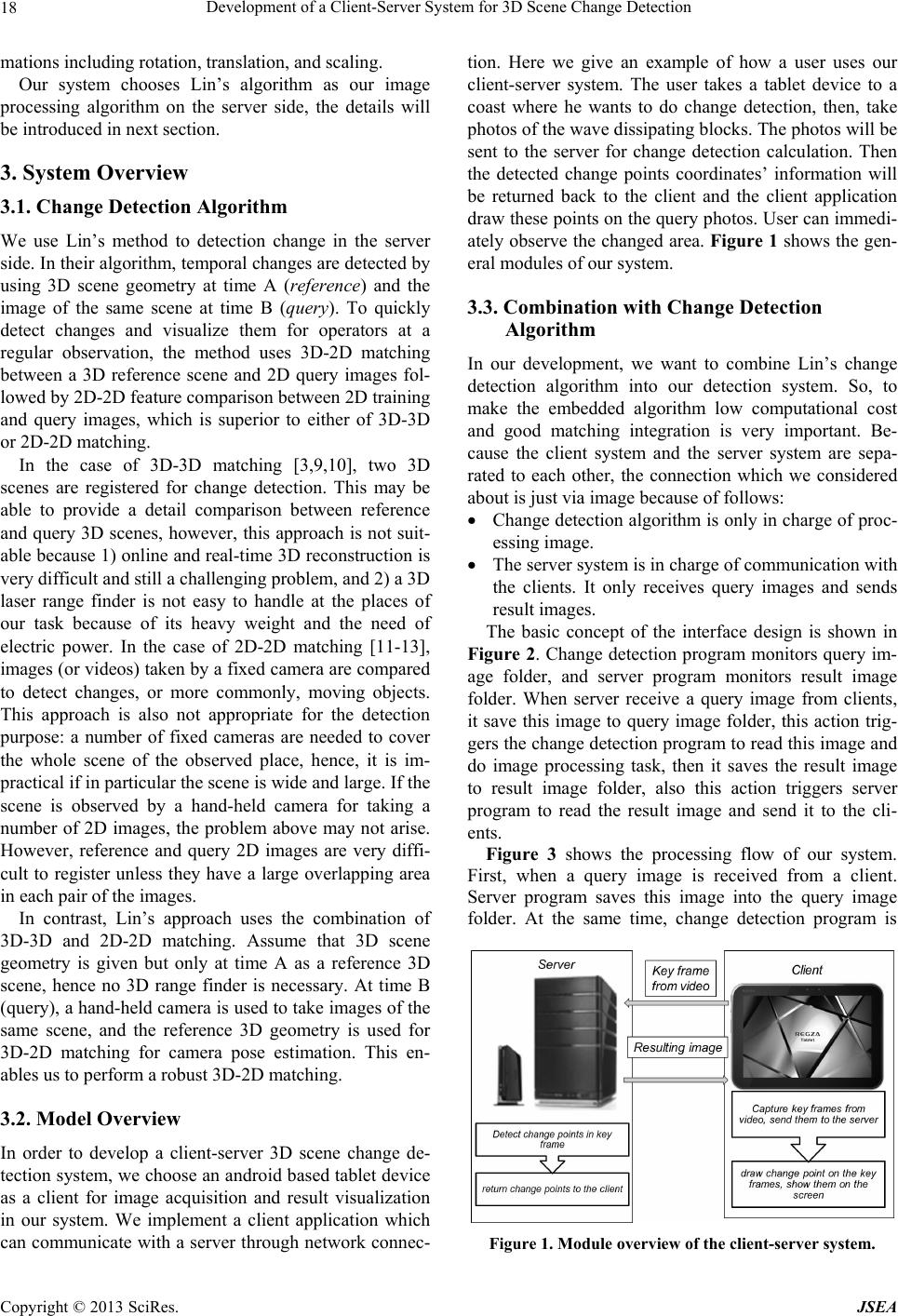
tion. Here we give an example of how a user uses our
client-server system. The user takes a tablet device to a
coast where he wants to do change detection, then, take
photos of the wave dissipatin g blocks. Th e photo s will be
sent to the server for change detection calculation. Then
the detected change points coordinates’ information will
be returned back to the client and the client application
draw these points on the query photos. User can immedi-
ately observe the changed area. Figure 1 shows the gen-
eral modules o f ou r syst em.
3.3. Combination with Change Detection
Algorithm
In our development, we want to combine Lin’s change
detection algorithm into our detection system. So, to
make the embedded algorithm low computational cost
and good matching integration is very important. Be-
cause the client system and the server system are sepa-
rated to each other, the connection which we considered
about is just via image because of follows:
Change detection algorithm is only in charge of proc-
essing image.
The server system is in charge of communication with
the clients. It only receives query images and sends
result images.
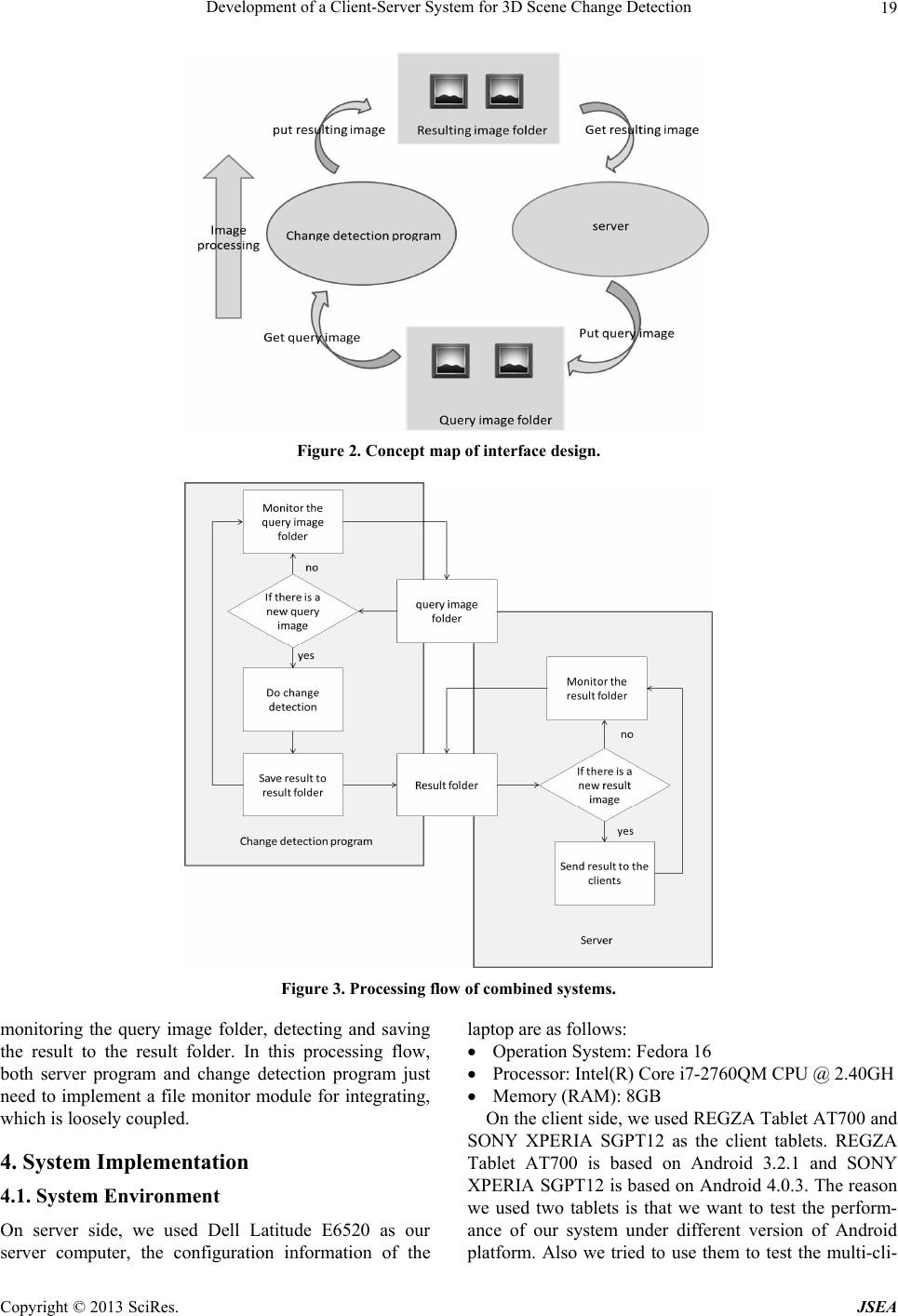
The basic concept of the interface design is shown in
Figure 2. Change detection program monitors query im-
age folder, and server program monitors result image
folder. When server receive a query image from clients,
it save this image to query image folder, this action trig-
gers the change detection program to read this image and
do image processing task, then it saves the result image
to result image folder, also this action triggers server
program to read the result image and send it to the cli-
ents.
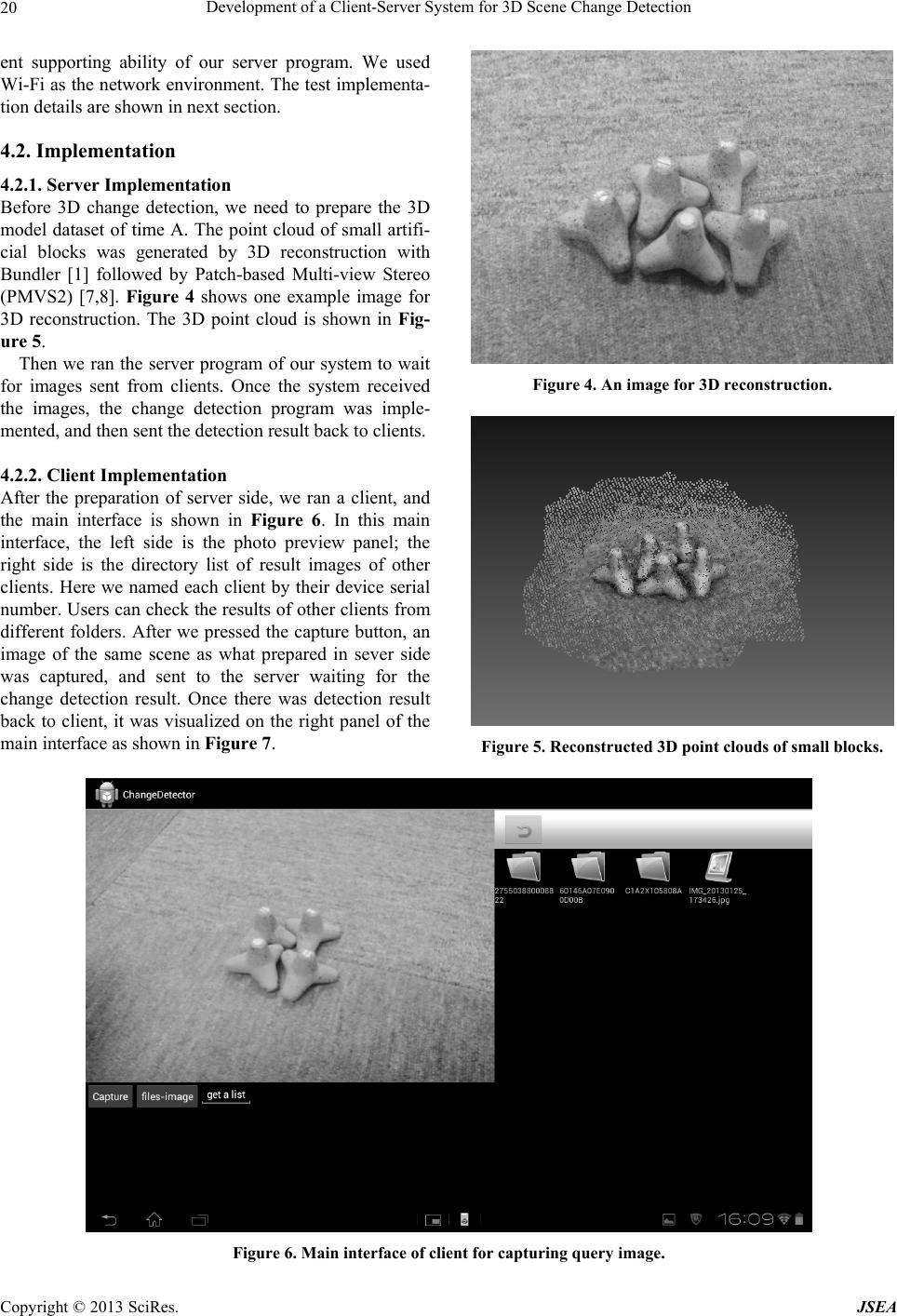
Figure 3 shows the processing flow of our system.
First, when a query image is received from a client.
Server program saves this image into the query image
folder. At the same time, change detection program is
Figure 1. Module overview of the client-server system.
Copyright © 2013 SciRes. JSEA