A. S. JABER ET AL.
Copyright © 2013 SciRes. EPE
462
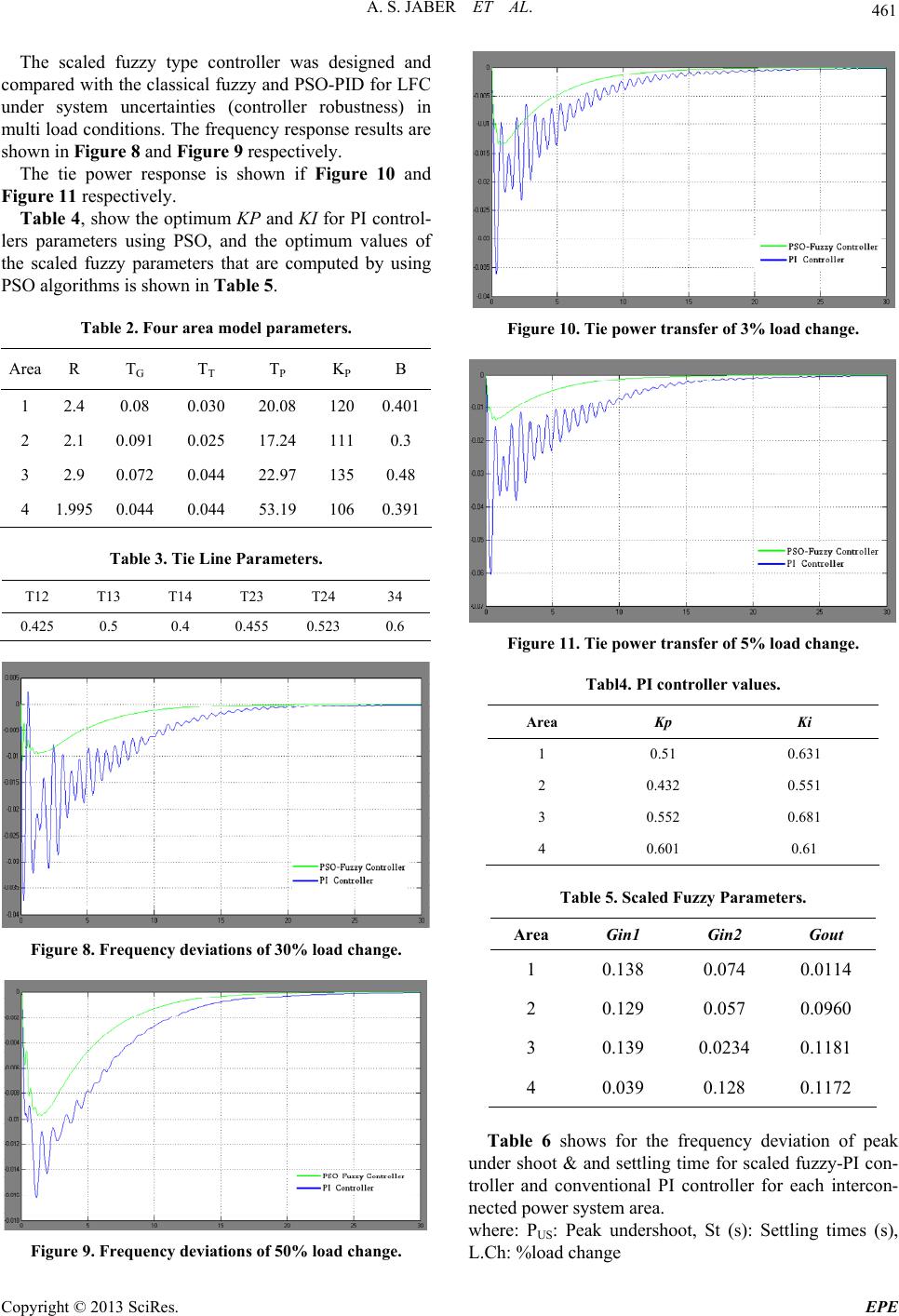
Response Comparison For Scaled Table 6. Frequency
Fuzzy-PI Controller And Conventional PI Controller.
PI controller PSO fuzzy controller
L.Ch
Ps)
US St (PUS S.t (s)
1 0. 0 0818 21.2 .004514.23
2 0.0233 23.1 0.0081 14.97
3 0.0361 23.7 0.0132 15.12
4 0.0472 24.5 0.0178 15.43
5 0.0605 24.81 0.0227 15.91
able 7. Power transfer response Comparison of scaled
oller
T
fuzzy-PI controller and conventional PI controller.
PI controller PSO fuzzy contr
L.Ch
PUS*1 US
0^-3 St (s) P St (s)
1 3 5.342 22.4 .32117.14
2 10.938 23.2 6.712 18.52
3 16.311 23.7 9.131 18.79
4 22.331 23.9 12.342 19.31
5 27.211 24.8 16.201 20.54
Table 7 shows for the total power transfer deviation of
pe
d method performance is
de
ak under shoot & and settling time for scaled fuzzy-PI
controller and conventional PI controller for each inter-
connected power system area.
The robustness of the propose
monstrated based on ITAE that is under step change in
the different demands as
1
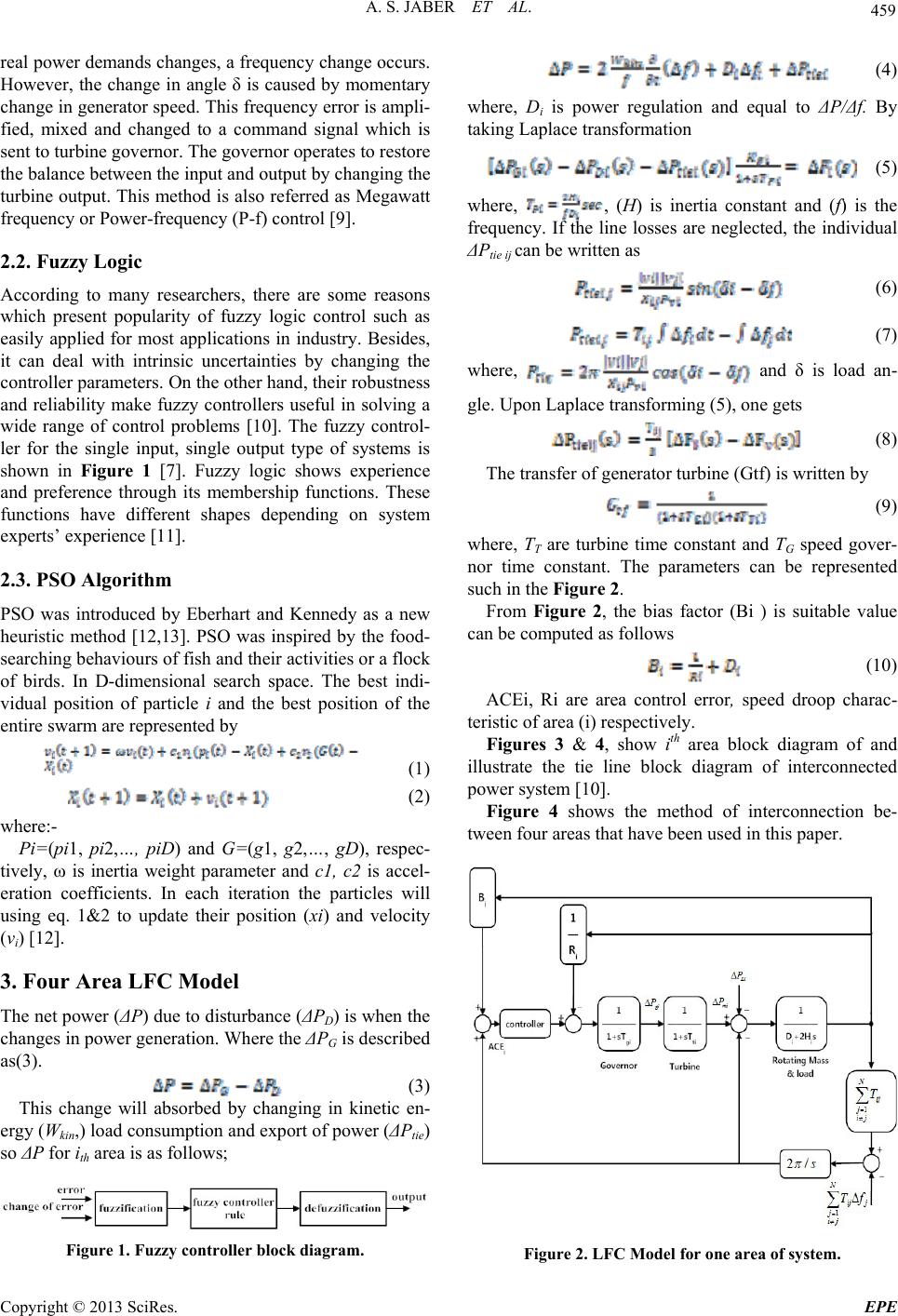
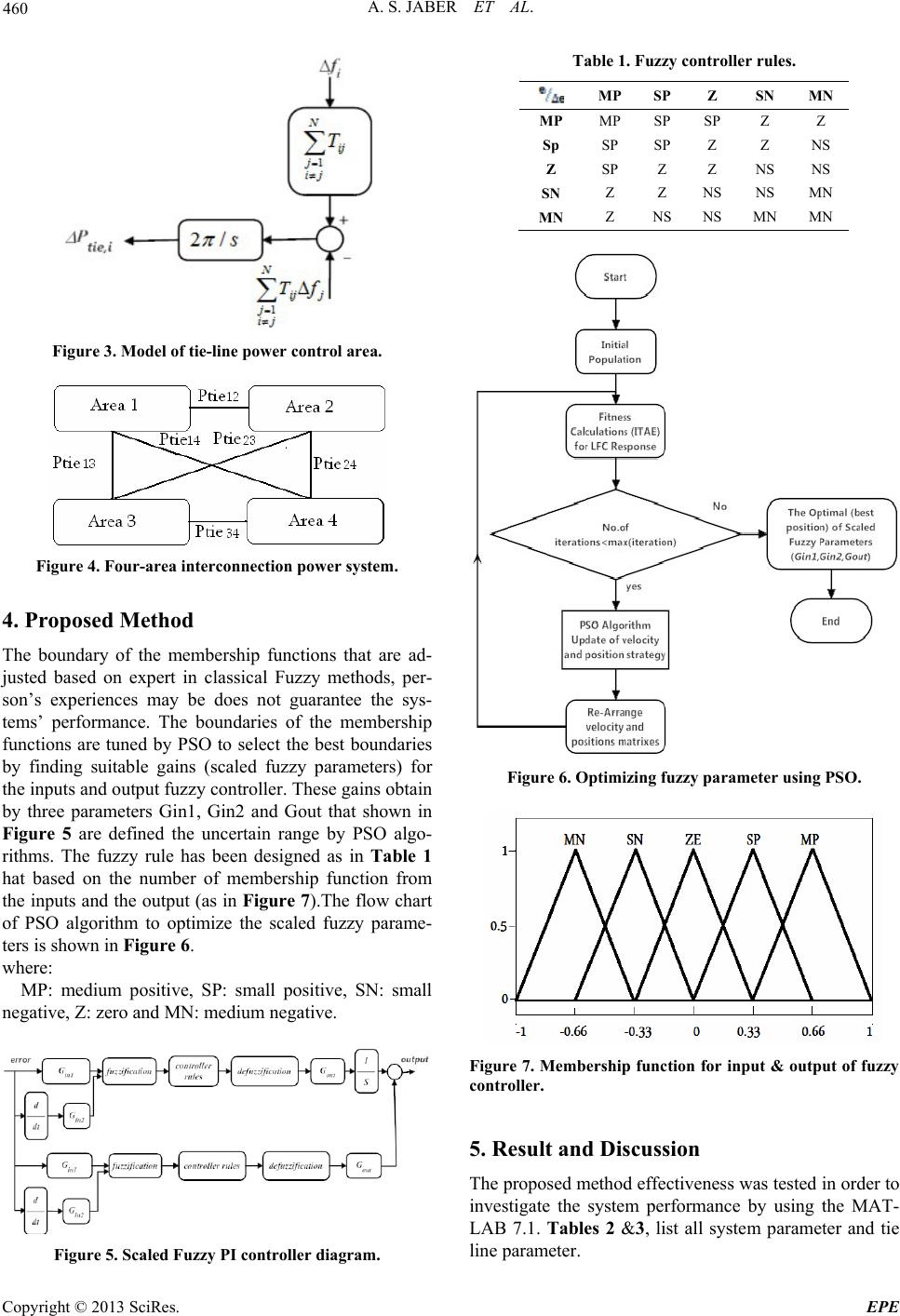
Finally, from tables (6,7) and figures (8 to 11) of
ch
6. Conclusions
ces PSO-FLC to improve the
step
ange, the scaled Fuzzy controller has better perform-
ance than the optimized PI controller at all operating
conditions. Therefore, the performance comparison be-
tween both controllers indicates that the frequency re-
sponse of the proposed method has smaller undershoot
and shorter in settling time with respect to PI controller.
This paper introduper-
formance of four-area power system and the linearization
in errors is considered as parametric uncertainties. Each
area consists of the turbine, governor and power system
which modelled by first-order transfer functions. In addi-
tion, PSO was used to adjust the input and the output of
FLC memberships. Simulation results proved that the
proposed scaled FLC has obtained fast response and less
undershoots compared to conventional PI controller.
REFERENCES
[1] Y. Wang, R. Zhou and C. Wen, “Robust Load-frequency
Controller Design for Power Systems,” Generation,
Transmission and, Vol. 140, No. 1, 1993.
[2] E. Çam and İ. Kocaarslan, “Load Frequency Control in
Two Area Power Systems using Fuzzy Logic Controller,”
Energy Conversion and Management, Vol. 46, No. 2,
2005, pp. 233-243. doi:10.1016/j.enconman.2004.02.022
[3] A. A. Ghany, “Design of Static Output Feedback PID
controller via ILMI method for a Power System Stabi-
lizer,” Power System Conference, MEPCON, 2008.
[4] A. Stankovic, “On Robust Control Analysis and Design
for Load Frequency Regulation,” Power Systems, IEEE,
Vol. 13, No. 2, 1998, pp. 449-455. doi:10.1109/59.667367
[5] K. Parmar, S. Majhi and D. Kothari, “Multi-area Load
Frequency Control in a Power System using Optimal Out-
put Feedback Method,”(PEDES) & 2010 Power, 2010.
[6] C. Chang and W. Fu, “Area Load Frequency Control
using Fuzzy Gain Scheduling of PI Controllers,” Electric
Power Systems Research, 1997.
doi:10.1016/S0378-7796(96)01199-6
[7] S. Broujeni, S. Hemmati and H. Fayazi, “Load Frequency
Control in Multi Area Electric Power System using Ge-
netic Scaled Fuzzy Logic,” Int. J. Phys. Sci, 2011.
[8] J. Hertz, A. Krogh and R. Palmer, “Introduction to the
Theory of Neural Computation,” 1991.
[9] H. Saadat, Power System Analysis, Mcgraw-Hill, 2005.
[10] T. W.Yang, R. Zhang and C. Zhang, “Research of Real-
izing PID Controller Based On FPGA,” Microcomputer
Information, 2005, pp. 2-11.
[11] K Tomsovic “Fuzzy,” in International Conference On
Intelligent System Application, 1999.
[12] J. Kennedy and R. Eberhart, “Particle Swarm Optimiza-
tion,” Neural Networks, 1995. Proceedings, pp. 2-6.
[13] A. Jaber, A. Ahmad and A. Abdalla, “Advance Two-Area
Load Frequency Control Using Particle Swarm Optimiza-
tion Scaled Fuzzy Logic,” Advanced Materials Research,
Vol. 622-623, 2013, pp. 80-85.