Restricted Hysteresis Reduce Redundancy in Edge Detection 163
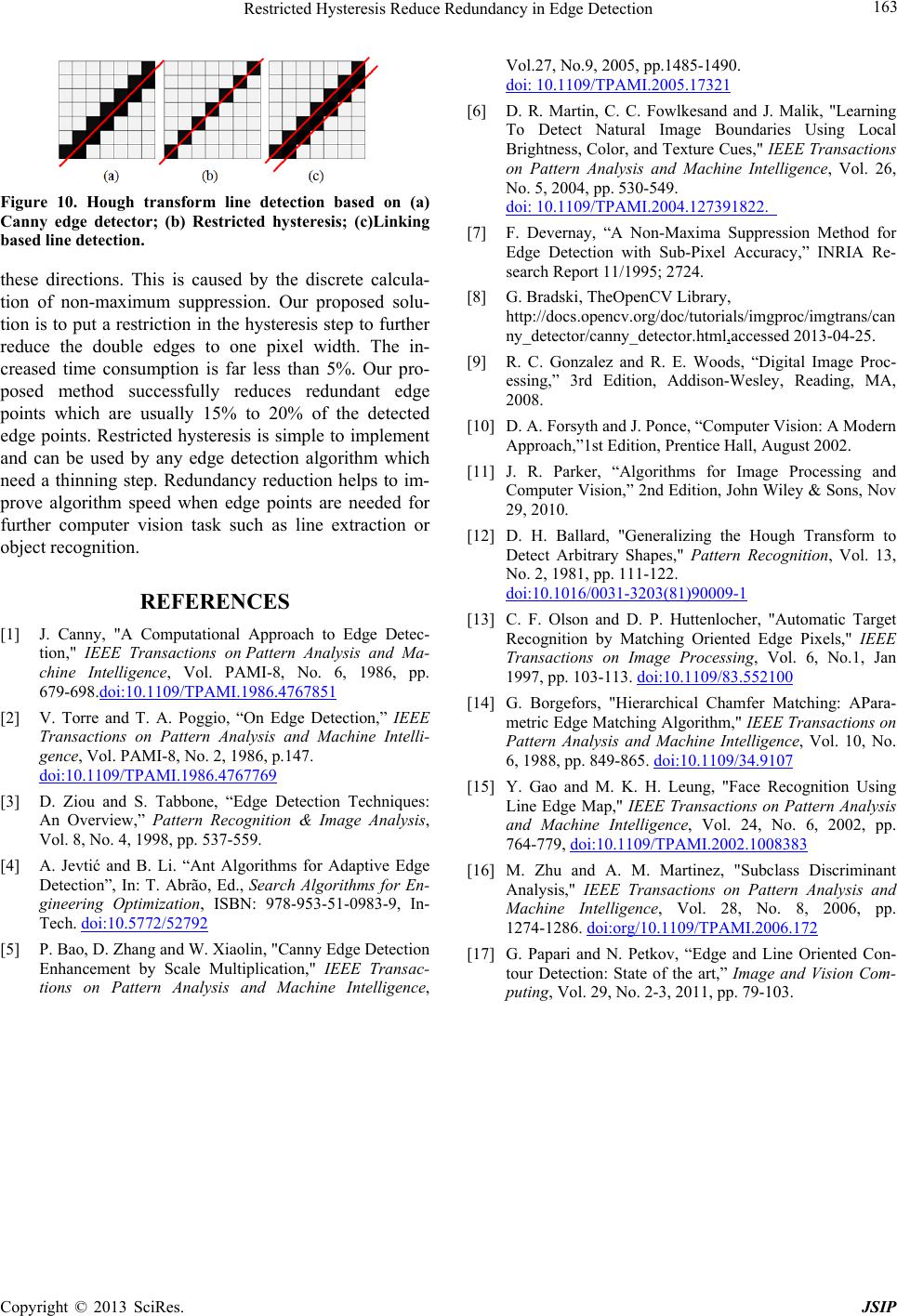
Figure 10. Hough transform line detection based on (a)
Canny edge detector; (b) Restricted hysteresis; (c)Linking
based line detection.
these directions. This is caused by the discrete calcula-
tion of non-maximum suppression. Our proposed solu-
tion is to put a restriction in the hysteresis step to further
reduce the double edges to one pixel width. The in-
creased time consumption is far less than 5%. Our pro-
posed method successfully reduces redundant edge
points which are usually 15% to 20% of the detected
edge points. Restricted hysteresis is simple to implement
and can be used by any edge detection algorithm which
need a thinning step. Redundancy reduction helps to im-
prove algorithm speed when edge points are needed for
further computer vision task such as line extraction or
object recognition.
REFERENCES
[1] J. Canny, "A Computational Approach to Edge Detec-
tion," IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, Vol. PAMI-8, No. 6, 1986, pp.
679-698.doi:10.1109/TPAMI.1986.4767851
[2] V. Torre and T. A. Poggio, “On Edge Detection,” IEEE
Transactions on Pattern Analysis and Machine Intelli-
gence, Vol. PAMI-8, No. 2, 1986, p.147.
doi:10.1109/TPAMI.1986.4767769
[3] D. Ziou and S. Tabbone, “Edge Detection Techniques:
An Overview,” Pattern Recognition & Image Analysis,
Vol. 8, No. 4, 1998, pp. 537-559.
[4] A. Jevtić and B. Li. “Ant Algorithms for Adaptive Edge
Detection”, In: T. Abrão, Ed., Search Algorithms for En-
gineering Optimization, ISBN: 978-953-51-0983-9, In-
Tech. doi:10.5772/52792
[5] P. Bao, D. Zhang and W. Xiaolin, "Canny Edge Detection
Enhancement by Scale Multiplication," IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
Vol.27, No.9, 2005, pp.1485-1490.
doi: 10.1109/TPAMI.2005.17321
[6] D. R. Martin, C. C. Fowlkesand and J. Malik, "Learning
To Detect Natural Image Boundaries Using Local
Brightness, Color, and Texture Cues," IEEE Transactions
on Pattern Analysis and Machine Intelligence, Vol. 26,
No. 5, 2004, pp. 530-549.
doi: 10.1109/TPAMI.2004.127391822.
[7] F. Devernay, “A Non-Maxima Suppression Method for
Edge Detection with Sub-Pixel Accuracy,” INRIA Re-
search Report 11/1995; 2724.
[8] G. Bradski, TheOpenCV Library,
http://docs.opencv.org/doc/tutorials/imgproc/imgtrans/can
ny_detector/canny_detector.html,accessed 2013-04-25.
[9] R. C. Gonzalez and R. E. Woods, “Digital Image Proc-
essing,” 3rd Edition, Addison-Wesley, Reading, MA,
2008.
[10] D. A. Forsyth and J. Ponce, “Computer Vision: A Modern
Approach,”1st Edition, Prentice Hall, August 2002.
[11] J. R. Parker, “Algorithms for Image Processing and
Computer Vision,” 2nd Edition, John Wiley & Sons, Nov
29, 2010.
[12] D. H. Ballard, "Generalizing the Hough Transform to
Detect Arbitrary Shapes," Pattern Recognition, Vol. 13,
No. 2, 1981, pp. 111-122.
doi:10.1016/0031-3203(81)90009-1
[13] C. F. Olson and D. P. Huttenlocher, "Automatic Target
Recognition by Matching Oriented Edge Pixels," IEEE
Transactions on Image Processing, Vol. 6, No.1, Jan
1997, pp. 103-113. doi:10.1109/83.552100
[14] G. Borgefors, "Hierarchical Chamfer Matching: APara-
metric Edge Matching Algorithm," IEEE Transactions on
Pattern Analysis and Machine Intelligence, Vol. 10, No.
6, 1988, pp. 849-865. doi:10.1109/34.9107
[15] Y. Gao and M. K. H. Leung, "Face Recognition Using
Line Edge Map," IEEE Transactions on Pattern Analysis
and Machine Intelligence, Vol. 24, No. 6, 2002, pp.
764-779, doi:10.1109/TPAMI.2002.1008383
[16] M. Zhu and A. M. Martinez, "Subclass Discriminant
Analysis," IEEE Transactions on Pattern Analysis and
Machine Intelligence, Vol. 28, No. 8, 2006, pp.
1274-1286. doi:org/10.1109/TPAMI.2006.172
[17] G. Papari and N. Petkov, “Edge and Line Oriented Con-
tour Detection: State of the art,” Image and Vision Com-
puting, Vol. 29, No. 2-3, 2011, pp. 79-103.
Copyright © 2013 SciRes. JSIP