New Approach in Processing of the Infrared Image Sequence for Moving Dim Point Targets Detection
148
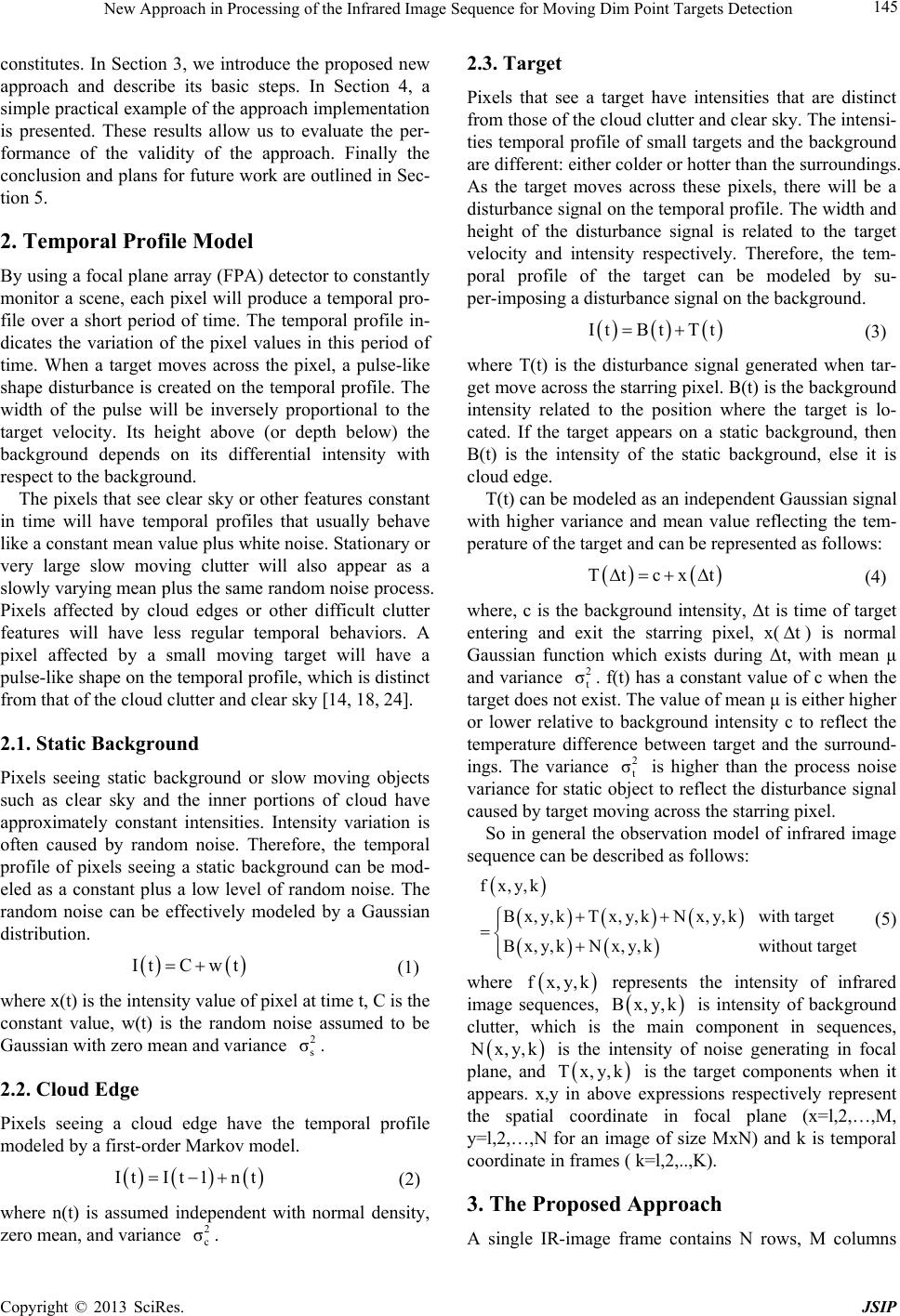
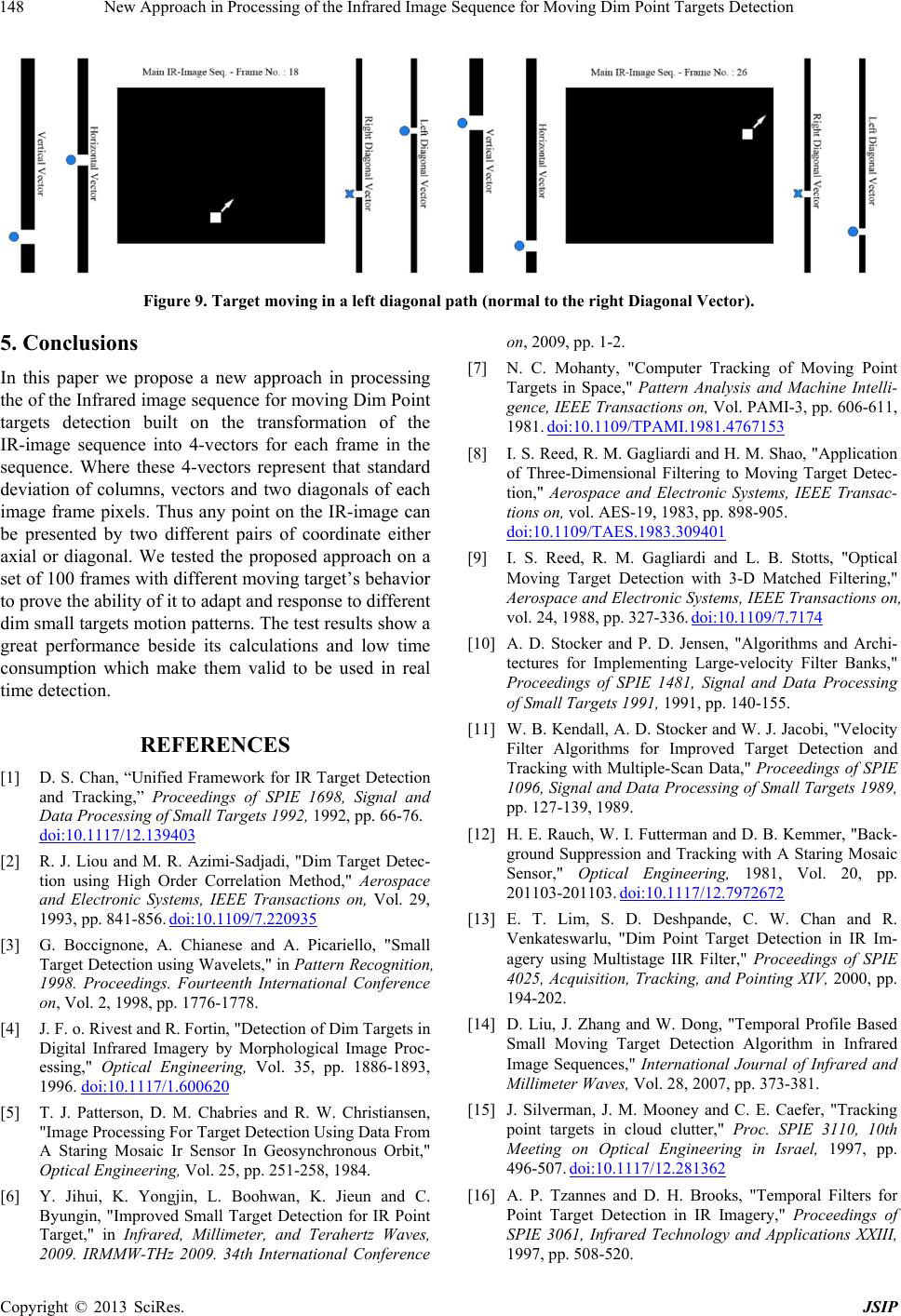
Figure 9. Target moving in a left diagonal path (normal to the right Diagonal Vector).
5. Conclusions
In this paper we propose a new approach in processing
the of the Infrared image sequence for moving Dim Point
targets detection built on the transformation of the
IR-image sequence into 4-vectors for each frame in the
sequence. Where these 4-vectors represent that standard
deviation of columns, vectors and two diagonals of each
image frame pixels. Thus any point on the IR-image can
be presented by two different pairs of coordinate either
axial or diagonal. We tested the proposed approach on a
set of 100 frames with different moving target’s behavior
to prove the ability of it to adapt and response to different
dim small targets motion patterns. The test results show a
great performance beside its calculations and low time
consumption which make them valid to be used in real
time detection.
REFERENCES
[1] D. S. Chan, “Unified Framework for IR Target Detection
and Tracking,” Proceedings of SPIE 1698, Signal and
Data Processing of Small Targets 1992, 1992, pp. 66-76.
doi:10.1117/12.139403
[2] R. J. Liou and M. R. Azimi-Sadjadi, "Dim Target Detec-
tion using High Order Correlation Method," Aerospace
and Electronic Systems, IEEE Transactions on, Vol. 29,
1993, pp. 841-856. doi:10.1109/7.220935
[3] G. Boccignone, A. Chianese and A. Picariello, "Small
Target Detection using Wavelets," in Pattern Recognition,
1998. Proceedings. Fourteenth International Conference
on, Vol. 2, 1998, pp. 1776-1778.
[4] J. F. o. Rivest and R. Fortin, "Detection of Dim Targets in
Digital Infrared Imagery by Morphological Image Proc-
essing," Optical Engineering, Vol. 35, pp. 1886-1893,
1996. doi:10.1117/1.600620
[5] T. J. Patterson, D. M. Chabries and R. W. Christiansen,
"Image Processing For Target Detection Using Data From
A Staring Mosaic Ir Sensor In Geosynchronous Orbit,"
Optical Engineering, Vol. 25, pp. 251-258, 1984.
[6] Y. Jihui, K. Yongjin, L. Boohwan, K. Jieun and C.
Byungin, "Improved Small Target Detection for IR Point
Target," in Infrared, Millimeter, and Terahertz Waves,
2009. IRMMW-THz 2009. 34th International Conference
on, 2009, pp. 1-2.
[7] N. C. Mohanty, "Computer Tracking of Moving Point
Targets in Space," Pattern Analysis and Machine Intelli-
gence, IEEE Transactions on, Vol. PAMI-3, pp. 606-611,
1981. doi:10.1109/TPAMI.1981.4767153
[8] I. S. Reed, R. M. Gagliardi and H. M. Shao, "Application
of Three-Dimensional Filtering to Moving Target Detec-
tion," Aerospace and Electronic Systems, IEEE Transac-
tions on, vol. AES-19, 1983, pp. 898-905.
doi:10.1109/TAES.1983.309401
[9] I. S. Reed, R. M. Gagliardi and L. B. Stotts, "Optical
Moving Target Detection with 3-D Matched Filtering,"
Aerospace and Electronic Systems, IEEE Transactions on,
vol. 24, 1988, pp. 327-336. doi:10.1109/7.7174
[10] A. D. Stocker and P. D. Jensen, "Algorithms and Archi-
tectures for Implementing Large-velocity Filter Banks,"
Proceedings of SPIE 1481, Signal and Data Processing
of Small Targets 1991, 1991, pp. 140-155.
[11] W. B. Kendall, A. D. Stocker and W. J. Jacobi, "Velocity
Filter Algorithms for Improved Target Detection and
Tracking with Multiple-Scan Data," Proceedings of SPIE
1096, Signal and Data Processing of Small Targets 1989,
pp. 127-139, 1989.
[12] H. E. Rauch, W. I. Futterman and D. B. Kemmer, "Back-
ground Suppression and Tracking with A Staring Mosaic
Sensor," Optical Engineering, 1981, Vol. 20, pp.
201103-201103. doi:10.1117/12.7972672
[13] E. T. Lim, S. D. Deshpande, C. W. Chan and R.
Venkateswarlu, "Dim Point Target Detection in IR Im-
agery using Multistage IIR Filter," Proceedings of SPIE
4025, Acquisition, Tracking, and Pointing XIV, 2000, pp.
194-202.
[14] D. Liu, J. Zhang and W. Dong, "Temporal Profile Based
Small Moving Target Detection Algorithm in Infrared
Image Sequences," International Journal of Infrared and
Millimeter Waves, Vol. 28, 2007, pp. 373-381.
[15] J. Silverman, J. M. Mooney and C. E. Caefer, "Tracking
point targets in cloud clutter," Proc. SPIE 3110, 10th
Meeting on Optical Engineering in Israel, 1997, pp.
496-507. doi:10.1117/12.281362
[16] A. P. Tzannes and D. H. Brooks, "Temporal Filters for
Point Target Detection in IR Imagery," Proceedings of
SPIE 3061, Infrared Technology and Applications XXIII,
1997, pp. 508-520.
Copyright © 2013 SciRes. JSIP