Combining Multiple Cues for Pedestrian Detection in Crowded Situations
Copyright © 2013 SciRes. JSIP
65
6. Acknowledgements
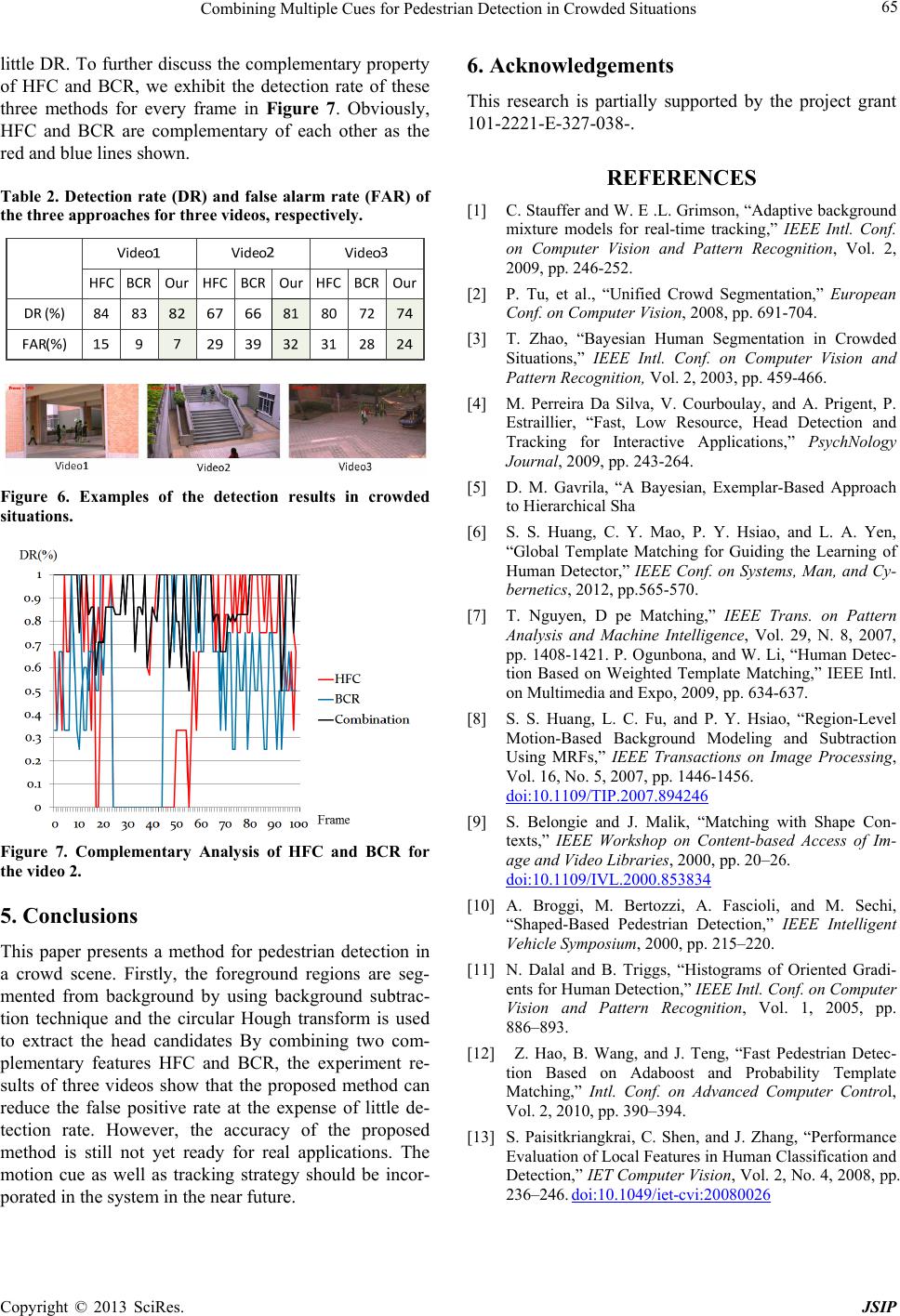
little DR. To further discuss the comple mentary property
of HFC and BCR, we exhibit the detection rate of these
three methods for every frame in Figure 7. Obviously,
HFC and BCR are complementary of each other as the
red and blue lines shown.
This research is partially supported by the project grant
101-2221-E-327-038-.
REFERENCES
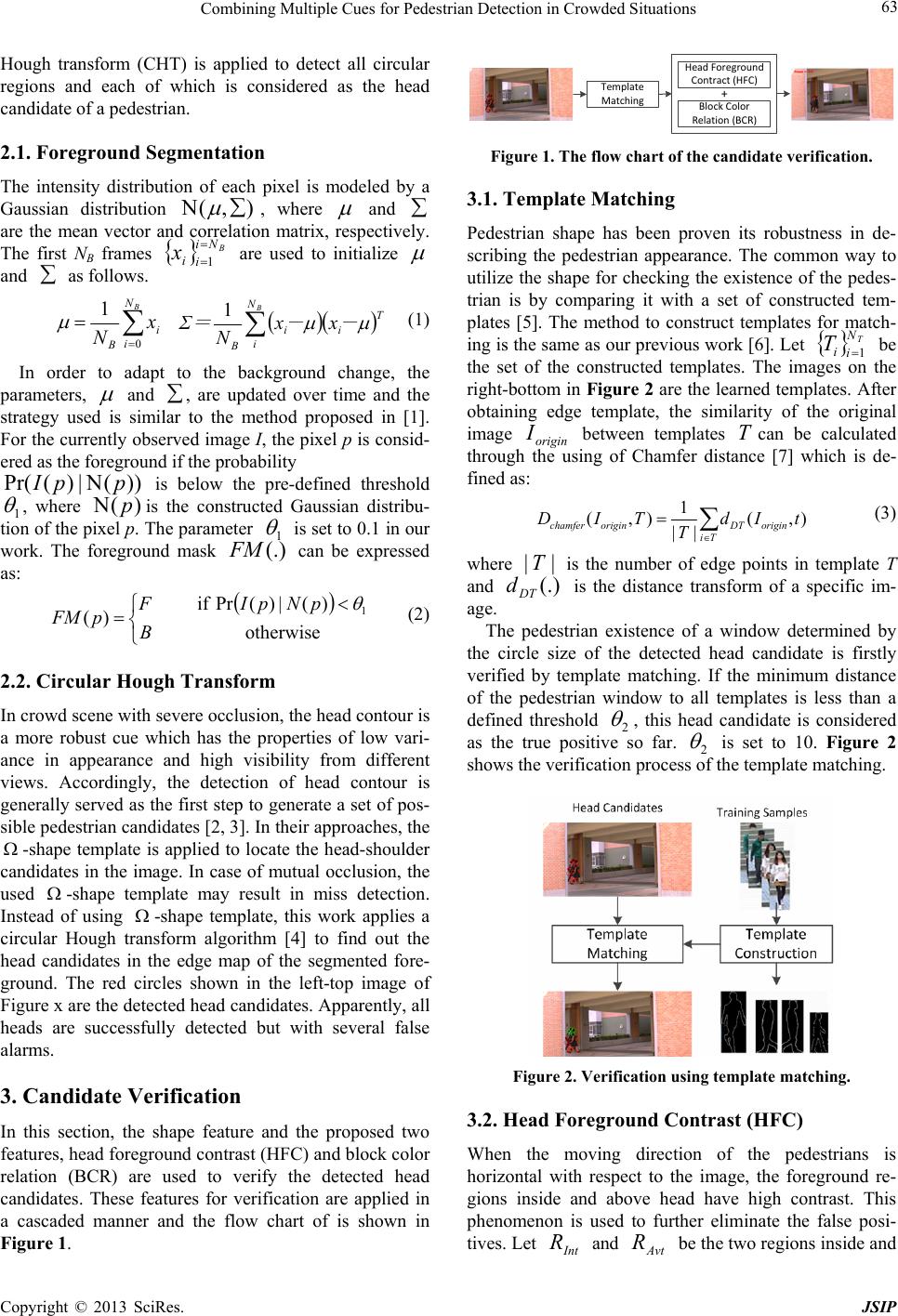
Table 2. Detection rate (DR) and false alarm rate (FAR) of
the three approaches for three videos, respectively. [1] C. Stauffer and W. E .L. Grimson, “Adaptive background
mixture models for real-time tracking,” IEEE Intl. Conf.
on Computer Vision and Pattern Recognition, Vol. 2,
2009, pp. 246-252.
[2] P. Tu, et al., “Unified Crowd Segmentation,” European
Conf. on Computer Vision, 2008, pp. 691-704.
[3] T. Zhao, “Bayesian Human Segmentation in Crowded
Situations,” IEEE Intl. Conf. on Computer Vision and
Pattern Recognition, Vol. 2, 2003, pp. 459-466.
[4] M. Perreira Da Silva, V. Courboulay, and A. Prigent, P.
Estraillier, “Fast, Low Resource, Head Detection and
Tracking for Interactive Applications,” PsychNology
Journal, 2009, pp. 243-264.
[5] D. M. Gavrila, “A Bayesian, Exemplar-Based Approach
to Hierarchical Sha
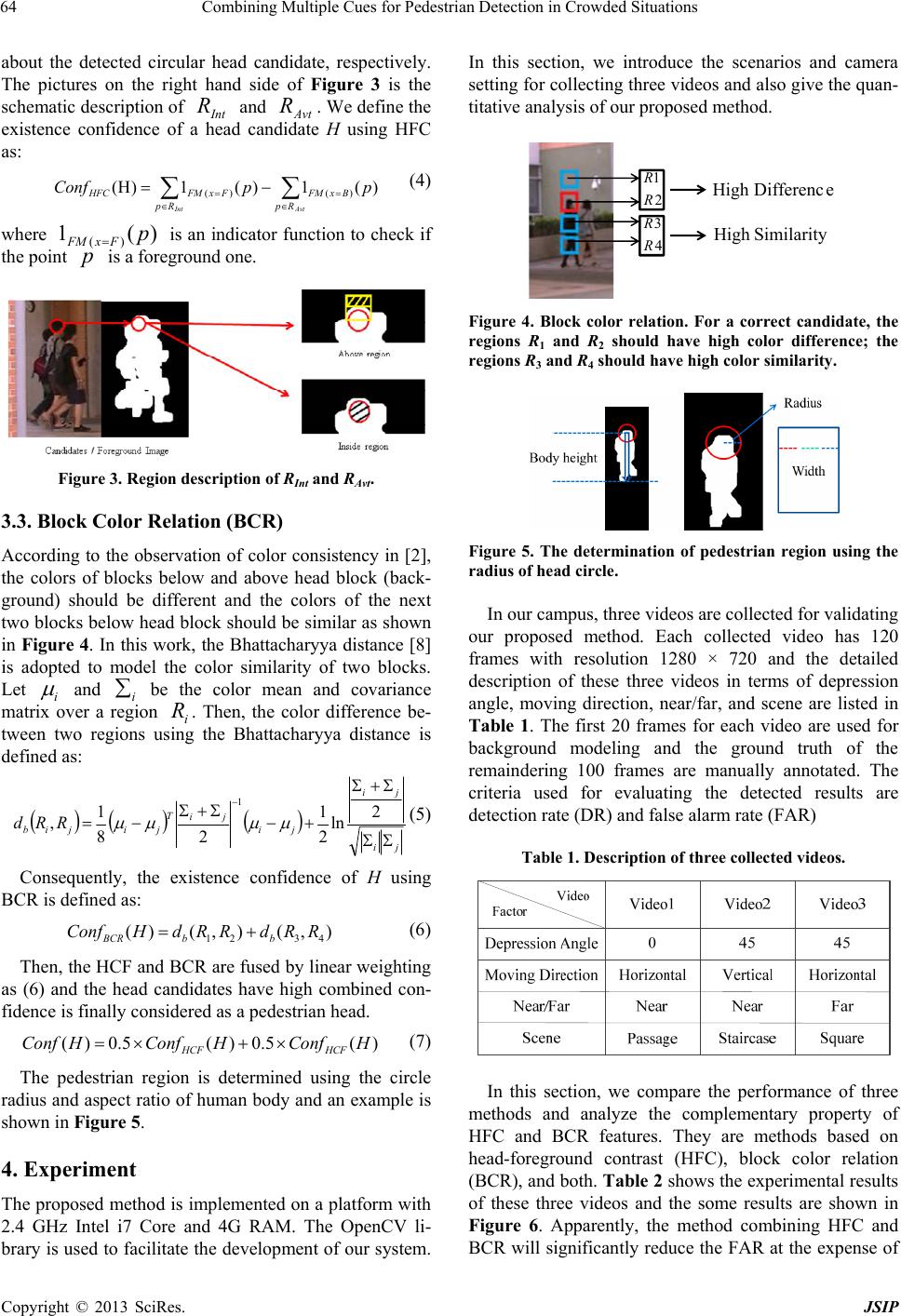
Figure 6. Examples of the detection results in crowded
situations. [6] S. S. Huang, C. Y. Mao, P. Y. Hsiao, and L. A. Yen,
“Global Template Matching for Guiding the Learning of
Human Detector,” IEEE Conf. on Systems, Man, and Cy-
bernetics, 2012, pp.565-570.
[7] T. Nguyen, D pe Matching,” IEEE Trans. on Pattern
Analysis and Machine Intelligence, Vol. 29, N. 8, 2007,
pp. 1408-1421. P. Ogunbona, and W. Li, “Human Detec-
tion Based on Weighted Template Matching,” IEEE Intl.
on Multimedia and Expo, 2009, pp. 634-637.
[8] S. S. Huang, L. C. Fu, and P. Y. Hsiao, “Region-Level
Motion-Based Background Modeling and Subtraction
Using MRFs,” IEEE Transactions on Image Processing,
Vol. 16, No. 5, 2007, pp. 1446-1456.
doi:10.1109/TIP.2007.894246
[9] S. Belongie and J. Malik, “Matching with Shape Con-
texts,” IEEE Workshop on Content-based Access of Im-
age and Video Libraries, 2000, pp. 20–26.
doi:10.1109/IVL.2000.853834
Figure 7. Complementary Analysis of HFC and BCR for
the video 2.
[10] A. Broggi, M. Bertozzi, A. Fascioli, and M. Sechi,
“Shaped-Based Pedestrian Detection,” IEEE Intelligent
Vehicle Symposium, 2000, pp. 215–220.
5. Conclusions
This paper presents a method for pedestrian detection in
a crowd scene. Firstly, the foreground regions are seg-
mented from background by using background subtrac-
tion technique and the circular Hough transform is used
to extract the head candidates By combining two com-
plementary features HFC and BCR, the experiment re-
sults of three videos show that the proposed method can
reduce the false positive rate at the expense of little de-
tection rate. However, the accuracy of the proposed
method is still not yet ready for real applications. The
motion cue as well as tracking strategy should be incor-
porated in the system in the near future.
[11] N. Dalal and B. Triggs, “Histograms of Oriented Gradi-
ents for Human Detection,” IEEE Intl. Conf. on Computer
Vision and Pattern Recognition, Vol. 1, 2005, pp.
886–893.
[12] Z. Hao, B. Wang, and J. Teng, “Fast Pedestrian Detec-
tion Based on Adaboost and Probability Template
Matching,” Intl. Conf. on Advanced Computer Control,
Vol. 2, 2010, pp. 390–394.
[13] S. Paisitkriangkrai, C. Shen, and J. Zhang, “Performance
Evaluation of Local Features in Human Classification and
Detection,” IET Computer Vision, Vol. 2, No. 4, 2008, pp.
236–246. doi:10.1049/iet-cvi:20080026