Journal of Signal and Information Processing, 2013, 4, 14-18
doi:10.4236/jsip.2013.43B003 Published Online August 2013 (http://www.scirp.org/journal/jsip)
SAR Imaging of Moving Target Based on Quadratic Phase
Function
Chao Wang, Shaobin Li
School of Electronics information Engineering Harbin Institute of Technology Harbin, China.
Email: wangchao517@hit.edu.cn, lishaobin411@163.com
Received March, 2013.
ABSTRACT
In this paper, a novel signal processing technique has been developed to refocus moving targets image from their
smeared responses in the Synthetic Aperture Radar (SAR) image according to the characteristics of the received signals
for moving targets. Quadratic Phase Function is introduced to the parameters estimation for moving target echo and
SAR imaging. Our method is available even under a low SNR environment and acquiring an exact SAR image of mov-
ing targets. The simulated results demonstrated the validity of the algorithm proposed.
Keywords: Synthetic Aperture Radar; Moving Targets; Quadratic Phase Function
1. Introduction
Airborne synthetic aperture radar (SAR) detection and
imaging of moving targets on the ground has been a sub-
ject of long-standing interest in both civil and military
applications such as battlefield reconnaissance, fire as-
sessment, traffic management and monitoring ocean cur-
rents. If there are moving targets in the observed scene,
SAR cannot simultaneously produce clear images of both
stationary and moving targets because they have different
Doppler frequency respectively, the target motion in-
duced phase errors, which interact with the matched filter
processing or cross-range compression, cause these im-
ages to be mislocated in the cross-range dimension and
smeared in both the cross-range and the range domains,
we can only focus on either the stationary target or the
moving target. How to detect moving targets in the
background of stationary objects called clutter is premise
for SAR imaging of moving targets, this problem is usu-
ally solved by applying the displaced phase center an-
tenna (DPCA) [1] or its modern extension, the space-
time adaptive processing (STAP) [2]. Radar returns from
terrain and stationary objects can be suppressed after
using DPCA or STAP, only the returns from moving
targets are used to reconstruct radar images.
Moving targets echo signal is generally characterized
by the linear frequency modulated (LFM) signal, before
obtain the focused images of moving targets, the pa-
rameters of LMF should be estimated firstly, and then
construct correct match filter of range and azimuth direc-
tions for imaging. In which, initial frequency and chirp
rate as the basic parameters of LMF, their estimation
problem has been an important research content of the
signal processing. In previous investigations, several
parameter estimation methods based on Maximum Like-
lihood (ML) [3] estimation cannot be implemented in
engineering because of a huge amount of computation.
Some signal processing methods such as Radon-Wigner
Transform (RWT) [4], Radon-Ambiguity Transform
(RAT) [5], Fractional Fourier Transform (FrFT) [6] have
been usually used in estimation of LMF parameters. It is
worth mentioning that WVD combine with Radon
Transform as a commonly used method of detection and
estimation for LMF can achieve an idea result. However,
there is cross-term interference associated with the WVD.
When the signal contains more than one component, the
WVD will generate cross-term interference between
components that occurs at spurious locations of the
time-frequency plane.
In this paper the Quadratic Phase Function (QPF) [7]
[8] is introduced to the SAR moving target imaging, and
a new SAR imaging algorithm based on the Quadratic
Phase Function is presented. This method can achieve an
idea result for moving targets imaging. The simulated
results demonstrate the validity of this algorithm.
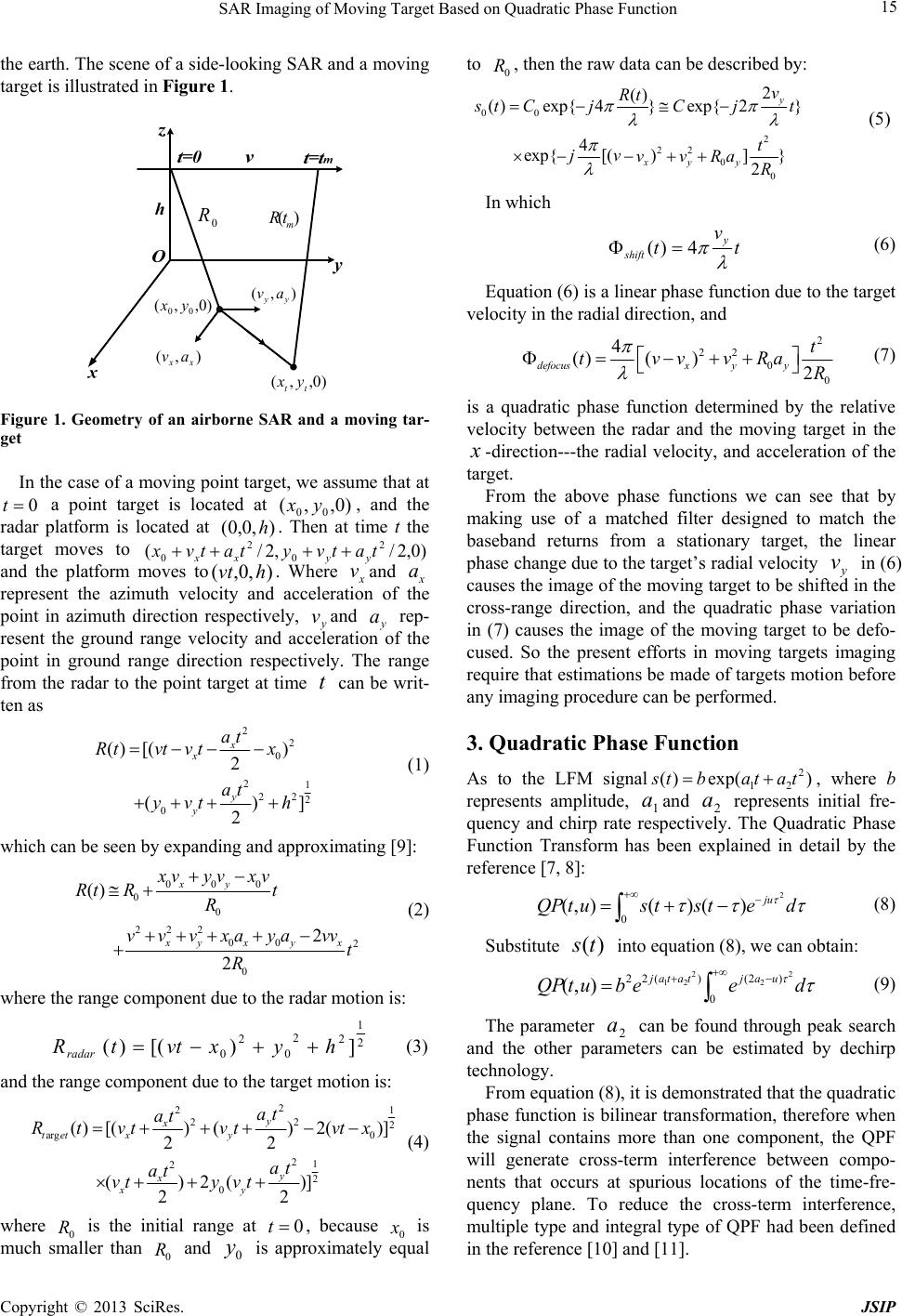
2. Radar Returns of Moving Targets
In this section, we setablish the signal model for the
received signal in SAR imaging of moving targets, here,
take the ground coordinate system for the reference co-
ordinate system and without considering the rotation of
Copyright © 2013 SciRes. JSIP