Paper Menu >>
Journal Menu >>
 Energy and Power E ngineering, 2013, 5, 247-252 doi:10.4236/epe.2013.54B048 Published Online July 2013 (http://www.scirp .o rg/journal/epe) Copyright © 2013 SciRes. EPE Comparative Study on Electromagnetic and Electr omechanical Transient Model for Grid-connected Photovoltaic Pow er System Man Zhang1, Hao Sun2, Zhigang Chen2, Xiaorong Xie1, Qirong Jiang1 1State Key Lab. of Po wer Systems, Dep ar tment of Electri cal Engin eer ing, Tsinghua University, Beijing, China 2Guangdong Electric Power Design Institute, Guangzhou, China Email: zhangman08@gmail.com Received February, 2013 ABSTRACT With t he de vel op ment o f ne w ene rg y tech nolo gy, the re a re increasing applicatio ns of grid-connected photovoltaic pow- er generation system. However, there is little research on development of electromechanical model of large scale pho- tovoltaic power station. The computatio nal sp eed will be ve ry slo w if electr o magnetic tra nsient model is u sed for stabil- it y st ud y becau se of its complexity. Therefore, study on electromecha nical transient model of grid-connected photovol- taic power generation system is of great meaning. In this paper, electromagnetic transient model of photovoltaic power generation system is introduced first, and then a general electromechanical transient model is proposed. These two kinds of simulation model are set up in PSCAD. By comparing the simulation results of two models, the correctness and validity of the electromechanical transient model is verified. It provides reference model for efficient simulation and modeling of grid-connected photovoltaic power station in large-scale power systems. Keywords: Photovoltaic Power; Electromag netic Transient Model; Electromechanical Transient Model; Simulation Comparison 1. Introduction With the development of new energy technology, there are more and more applications of grid-connected pho- tovoltaic po wer generatio n syste m [1,2]. Transient model of both accuracy and efficiency is needed in power sys- tem dynamic analysis with photovoltaic power genera- tion. In the previous study, two models usually used as photovoltaic power generation model, of which one is the power flow model, and the other is electro- magnetic transient model. The former uses photovoltaic system just as a simple power source without considering its dynamic process [3-5], while the latter is established ac- cording to specific photovoltaic system, and strictly re- flects the maximum power point tracking(MPPT ) and the inverter control [6-9]. The latter is very detailed and can meet the requirements of grid transient process analysis, but it also has many problems, such as: 1) the electro- magnetic transient model is not universal because the internal structure and control method of photovoltaic syst em are diffe rent of di ffere nt manufactures, so a lot of work is needed if we want to establish electromagnetic transient model for different manufacturers and types, 2) the electromagnetic transient model needs proprietary equipment internal parameters, which are difficult to obtain, 3) the electromagnetic transient model needs small compute step because of its complexity, resulting in long computation time, and 4) at present, large power grid analysis often requires business or engineering si- mulation software, so in order to improve the automation level and expand the scale of calculation, unified model is needed for different kinds of power, including photo- voltaic. In conclusion, according to the demand of the electromechanical transient simulation of power system, a universal modeling method is needed while analyzing the common features of different kinds of photovoltaic power generation system. In this paper, electromagnetic transient model of pho- tovoltaic power generation system is introduced first ac- cording to the references, and then a general electrome- chanical transient model of grid-connected photovoltaic power system is proposed, and two simulation models are established in PSCAD/EMTDC. By comparing the simulation results of two models, the correctness and validity of the electromechanical transient model is veri- fied, which provides reference model for simulation and modeling of large scale grid-connected photovoltaic po wer station. 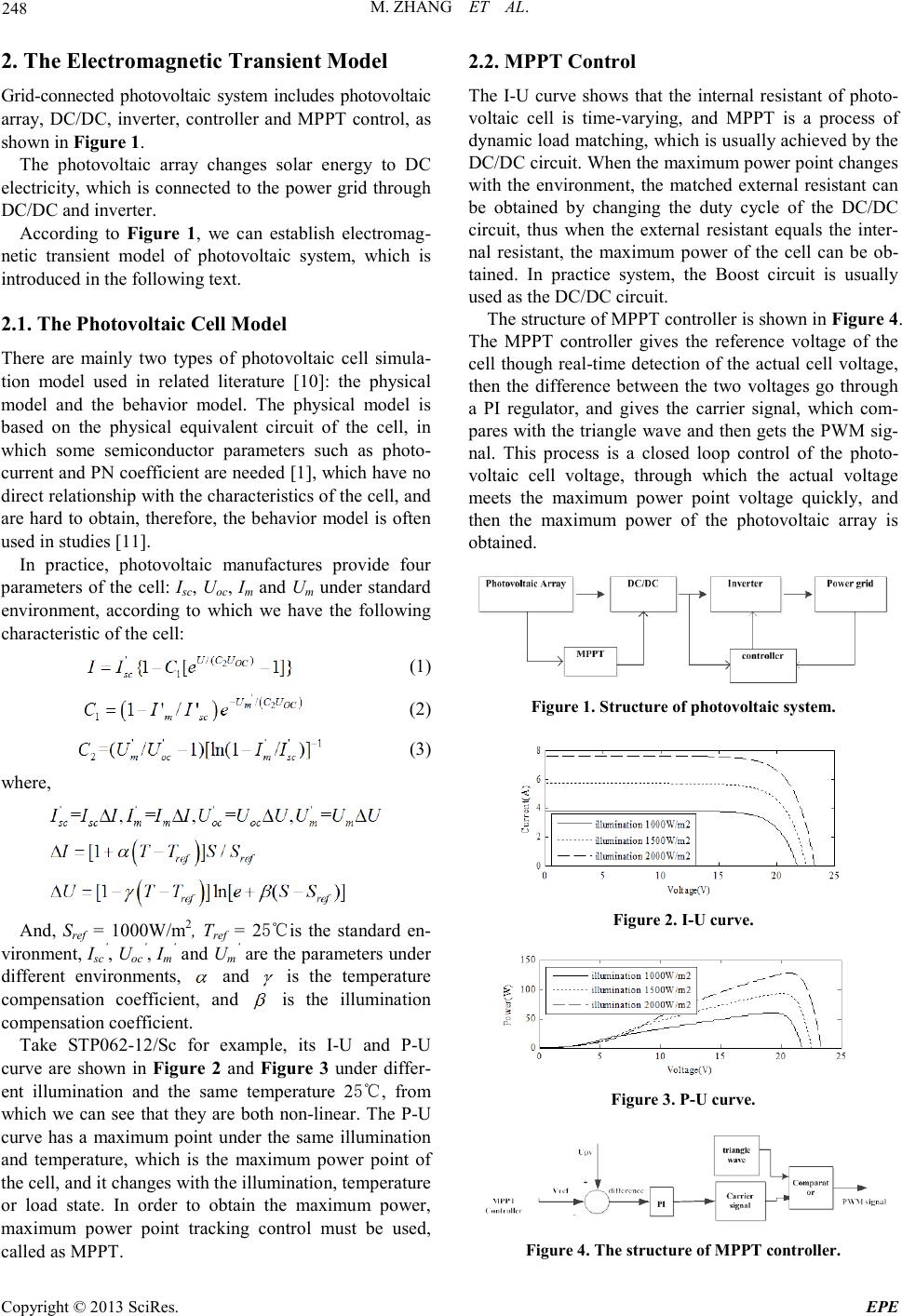 M. ZH AN G ET AL. Copyright © 2013 SciRes. EPE 248 2. The Electromagnetic Transient Model Grid-connected photovoltaic system includes photovol taic array, DC/DC, inverter, controller and MPPT control, as sho wn in Figure 1. The photovoltaic array changes solar energy to DC electricity, which is connected to the power grid through DC/DC and inverter. According to Figure 1, we can establish electromag- netic transient model of photovoltaic system, which is introduced in the following text. 2.1. The Photovoltaic Cell Model There are mainly two types of photovoltaic cell simula- tion model used in related literature [10]: the physical model and the behavior model. The physical model is based on the physical equivalent circuit of the cell, in which some semiconductor parameters such as photo- current and PN coefficient are needed [1] , which have no direct re lationship with the characteristics of the cell, and are hard to obtain, therefore, the behavior model is often used in studies [11]. In practice, photovoltaic manufactures provide four parameters of the cell: Isc, Uoc, Im and Um under standard environment, according to which we have the following characteristic of the cell: (1) (2) (3) where, And, Sref = 1000W/m2, Tref = 25℃is the standard en- vironment, Isc’, Uoc’, Im’ and Um’ are the parameters under different environments, and is the temperature compensation coefficient, and is the illumination compensatio n co e fficient. Take STP062-12/Sc for example, its I-U and P-U curve are shown in Figure 2 and Figure 3 under differ- ent illumination and the same temperature 25℃, from which we can see that they are both non-linear. The P-U curve has a maximum point under the same illumination and temperature, which is the maximum power point of the cell, and it changes with th e illumination, temperature or load state. In order to obtain the maximum power, maximum power point tracking control must be used, called as MPPT. 2.2. MPPT Control The I-U curve shows that the internal resistant of photo- voltaic cell is time-varying, and MPPT is a process of dynamic load matching, whic h is us uall y achi eve d by the DC/DC circuit. When the max i mu m power po i nt cha n ge s with the environment, the matched external resistant can be obtained by changing the duty cycle of the DC/DC circuit, thus when the external resistant equals the inter- nal resistant, the maximum power of the cell can be ob- tained. In practice system, the Boost circuit is usually used as the DC/DC circuit. The structure of MPPT co nt rol ler is sho wn i n Figure 4. The MPPT controller gives the reference voltage of the cell though real-time detection of the actual cell voltage, then the difference between the two voltages go through a PI regulator, and gives the carrier signal, which com- pares with the triangl e wave and then gets the PWM sig- nal. This process is a closed loop control of the photo- voltaic cell voltage, through which the actual voltage meets the maximum power point voltage quickly, and then the maximum power of the photovoltaic array is obtained. Figure 1 . Structure of photovoltaic syst em. Figure 2. I-U curve. Figure 3. P-U curve. Figure 4. T he structure of MPPT controller. 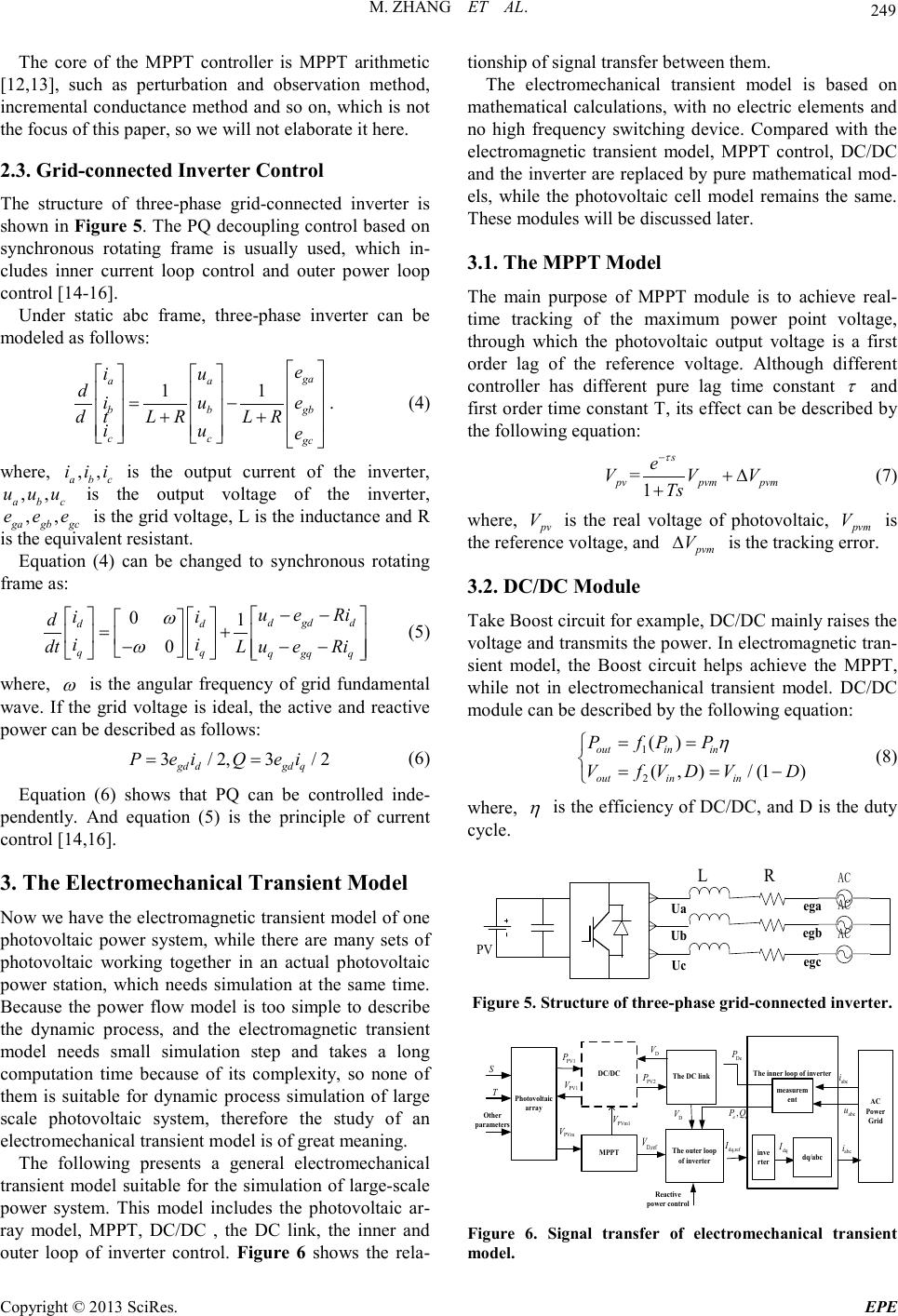 M. ZH AN G ET AL. Copyright © 2013 SciRes. EPE 249 The core of the MPPT controller is MPPT arithmetic [12,13], such as perturbation and observation method, incremental conductance method and so on, which is not the focus of this paper, so we will not elaborate it here. 2.3. Grid-connected Inverter Control The structure of three-phase grid-connected inverter is sho wn i n Figure 5. The PQ decoupling control based on synchronous rotating frame is usually used, which in- cludes inner current loop control and outer power loop control [14-16]. Under static abc frame, three-phase inverter can be modeled as follows: 11 ga aa bb gb cc gc e iu diue dt LRLR iue =− ++ . (4) where, ,, abc i ii is the output current of the inverter, ,, abc u uu is the output voltage of the inverter, ,, ga gb gc eee is the gr id vo lta ge, L is the ind ucta nce a nd R is the equivale nt re sistant. Equation (4) can be changed to synchronous rotating frame as: 01 0 d gdd dd qq q gqq u eRi ii d ii u eRi dt L ω ω −− =+ − −− (5) where, ω is the angular frequency of grid fundamental wave. If the grid voltage is ideal, the active and reactive power can be described as follows: 3/2, 3/2 gd dgd q P eiQei= = (6) Equation (6) shows that PQ can be controlled inde- pendently. And equation (5) is the principle of current control [14,16]. 3. The Electromechanical Transient Model Now we have the electromagnetic transient model of one photovoltaic power system, while there are many sets of photovoltaic working together in an actual photovoltaic power station, which needs simulation at the same time. Because the power flow model is too simple to describe the dynamic process, and the electromagnetic transient model needs small simulation step and takes a long computation time because of its complexity, so none of them is suitable for dynamic process simulation of large scale photovoltaic system, therefore the study of an electromechanical transient model is of great meaning. The following presents a general electromechanical transient model suitable for the simulation of large-scale power system. This model includes the photovoltaic ar- ray model, MPPT, DC/DC , the DC link, the inner and outer loop of inverter control. Figure 6 shows the rela- tionship of signal transfer between them. The electromechanical transient model is based on mathematical calculations, with no electric elements and no high frequency switching device. Compared with the electromagnetic transient model, MPPT control, DC/DC and the inverter are replaced by pure mathematical mod- els, while the photovoltaic cell model remains the same. These modules will b e discussed la te r. 3.1. The MPPT Model The main purpose of MPPT module is to achieve real- time tracking of the maximum power point voltage, through which the photovoltaic output voltage is a first order lag of the reference voltage. Although different controller has different pure lag time constant τ and first order ti me constant T, its e ffect can be described b y the followin g eq uation: =1 s pvpvm pvm e V VV Ts τ − +∆ + (7) where, pv V is the real voltage of photovoltaic, pvm V is the reference voltage, and pvm V∆ is the tracking error. 3.2. DC/DC Module Take Boo st circuit for exa mple, DC/DC main ly raise s the voltage and transmits the power. In electromagnetic tran- sient model, the Boost circuit helps achieve the MPPT, while not in electromechanical transient model. DC/DC module can be described by the follo wing equation: 1 2 () (,)/ (1) outin in out inin PfP P VfV DVD η = = == − (8) where, η is the efficiency of DC/D C, and D is the duty cycle. AC AC AC LR Ua Ub Uc ega egb egc PV Figure 5. Structure of three-phase grid-connected invert er. The inner loop of inverter The outer loop of inverter MPPT Photovoltaic array S T Other parameters PV1 P PV1 V PVm V DC/DC D,ref V The DC link PV2 P D V dq,ref I D V PVm1 V Reactive power control De P abc i abc u inve rter dq I dq/abc measurem ent , ee PQ abc i AC Power Grid Figure 6. Signal transfer of electromechanical transient mode l . 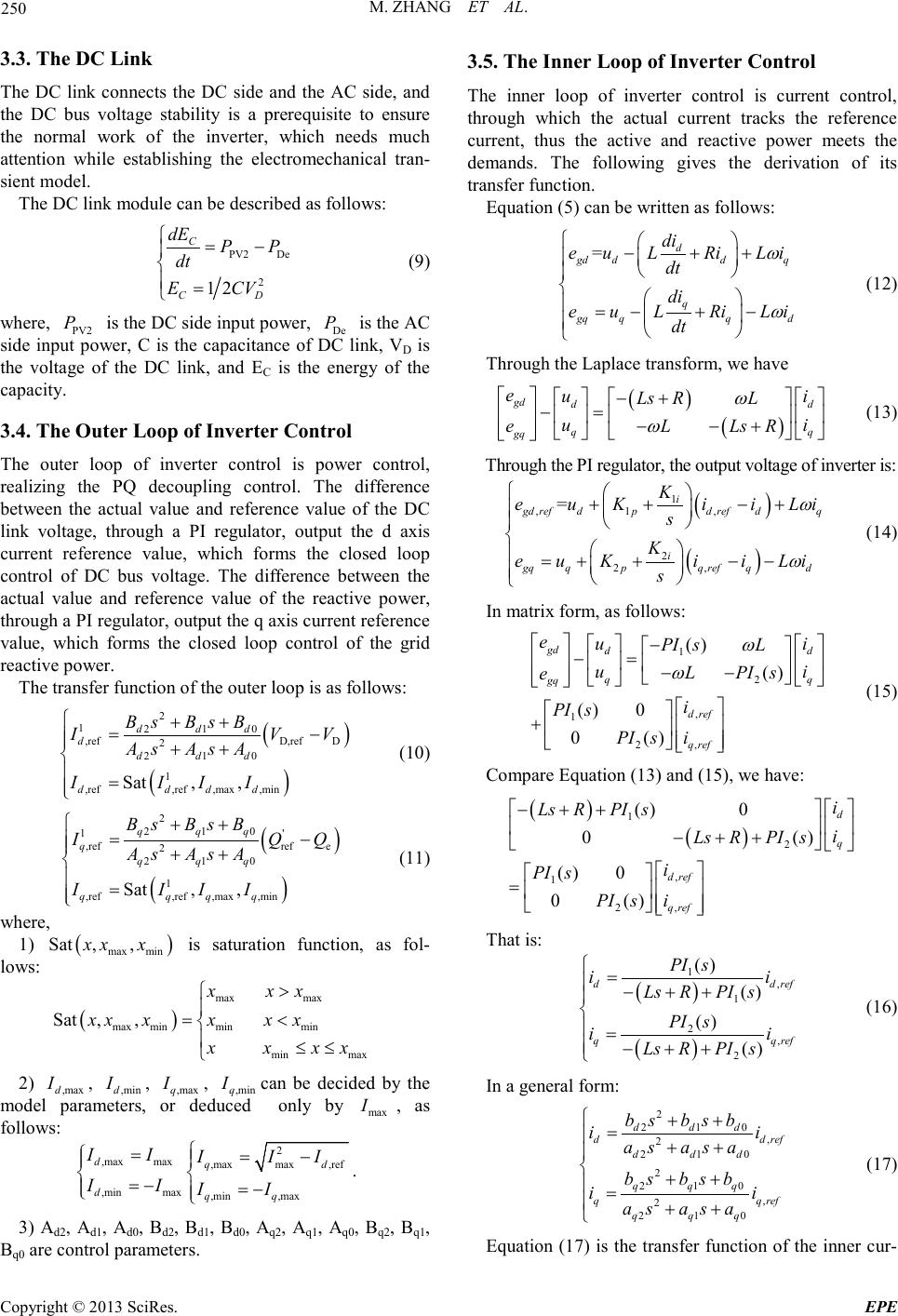 M. ZH AN G ET AL. Copyright © 2013 SciRes. EPE 250 3.3. The DC Link The DC link connects the DC side and the AC side, and the DC bus voltage stability is a prerequisite to ensure the normal work of the inverter, which needs much attention while establishing the electromechanical tran- sient model. The DC link module can be described as follows: PV2 De 2 12 C CD dE PP dt E CV = − = (9) where, PV2 P is the DC side inp ut po wer, De P is the AC side input power, C is the capacitance of DC link, VD is the voltage of the DC link, and EC is the energy of the capacity. 3.4. The Outer Loop of Inverter Control The outer loop of inverter control is power control, realizing the PQ decoupling control. The difference between the actual value and reference value of the DC link voltage, through a PI regulator, output the d axis current reference value, which forms the closed loop control of DC bus voltage. The difference between the actual value and reference value of the reactive power, thro ugh a P I re gula to r , o utp ut t he q axi s c ur r ent r e fer e nc e value, which forms the closed loop control of the grid reactive power. The transfer fu nction of the outer loop is as follows: ( ) ( ) 2 12 10 ,refD,ref D 2 2 10 1 ,ref,ref,max,min Sat, , d dd d d dd ddd d BsBs B I VV AsAs A III I ++ = − ++ = (10) ( ) ( ) 2 2 10 1' ,refref e 2 2 10 1 ,ref,ref,max ,min Sat,, q qq q q qq qqq q BsBs B I QQ AsAs A III I ++ = − ++ = (11) where, 1) ( ) max min Sat ,,xx x is saturation function, as fol- lows: ( ) max max max minminmin min max Sat,, x xx xxxxx x xx xx > = < ≤≤ 2) ,maxd I , ,mind I , ,maxq I , ,minq I can be decided by the model parameters, or deduced only by max I , as follows: 2 ,max max,maxmax ,ref ,minmax ,min ,max dqd dqq II I II II II = = − = −= − . 3) Ad2, Ad1, Ad0, Bd2, Bd1, Bd0, Aq2, Aq1, Aq0, Bq2, Bq1, Bq0 are control parameters. 3.5. The Inner Loop of Inverter Control The inner loop of inverter control is current control, through which the actual current tracks the reference current, thus the active and reactive power meets the demands. The following gives the derivation of its transfer function. Equation (5) c a n b e written as follows: = d gd ddq q gq qqd di euLRiL i dt di euLRiL i dt ω ω − ++ =− +− (12) Through t he Laplace transform, we ha ve ( ) ( ) gd dd qq gq e ui Ls RL ui LLs R e ω ω − + −= − −+ (13) Through the PI regulator, the output voltage of inverter is: ( ) ( ) 1 , 1, 2 2, = i gd refdpd refdq i gqqpqrefqd K euKiiLi s K e uKii Li s ω ω + +−+ =++−− (14) In matrix form, as follows: 1 2 , 1 2, () () () 0 0 () gd dd qq gq d ref q ref e ui PI sL ui LPI s e i PI s PI si ω ω − −= −− + (15) Compare Equation (13) and (15), we have: ( ) ( ) 1 2 , 1 2, () 0 0 () () 0 0 () d q d ref q ref i LsRPI s i LsRPI s i PI s PI si −+ + − ++ = That is: ( ) ( ) 1, 1 2, 2 () () () () dd ref qq ref PI s ii LsRPI s PI s ii LsRPI s = − ++ = − ++ (16) In a general form: 2 2 10 , 2 2 10 2 2 10 , 2 2 10 d dd dd ref d dd q qq qq ref q qq bsbs b ii asas a bsbs b ii asasa ++ = ++ ++ = ++ (17) Equation (17) is the transfer funct ion of the inner cur- 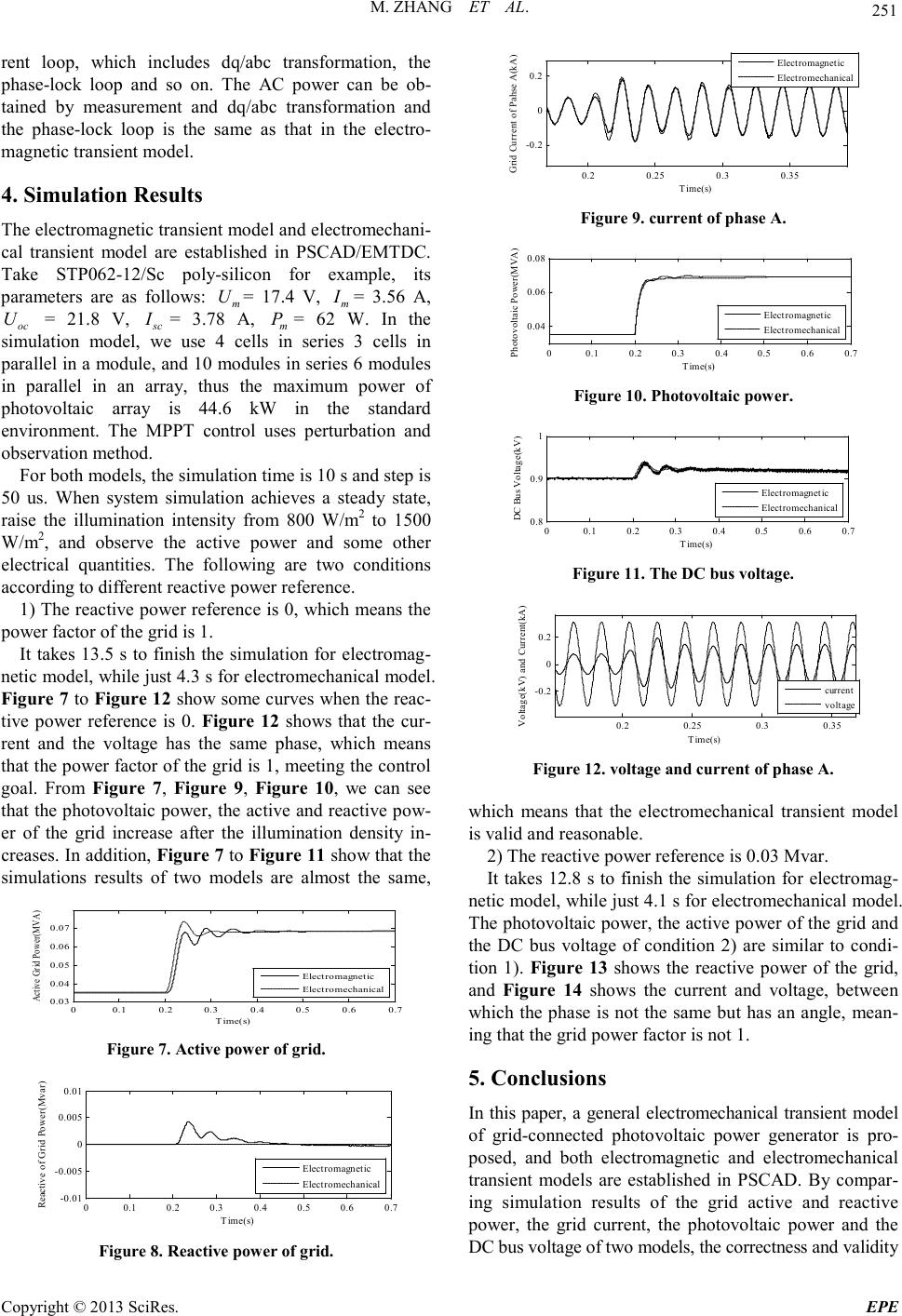 M. ZH AN G ET AL. Copyright © 2013 SciRes. EPE 251 rent loop, which includes dq/abc transformation, the phase-lock loop and so on. The AC power can be ob- tained by measurement and dq/abc transformation and the phase-lock loop is the same as that in the electro- magnetic transient model. 4. Simulation Results The electromagnetic transient model a nd electromechani- cal transient model are established in PSCAD/EMT DC. Take STP062-12/Sc poly-silicon for example, its parameters are as follows: m U= 17.4 V, m I = 3.56 A, oc U = 21.8 V, sc I = 3.78 A, m P = 62 W. In the simulation model, we use 4 cells in series 3 cells in parallel in a module, and 10 modules in series 6 modules in parallel in an array, thus the maximum power of photovoltaic array is 44.6 kW in the standard environment. The MPPT control uses perturbation and observation method. For both models, the simulation time is 10 s and step is 50 us. When system simulation achieves a steady state, raise the illumination intensity from 800 W/m2 to 1500 W/m2, and observe the active p ower and some other electrical quantities. The following are two conditions according to different reactive power reference. 1) The reactive power reference is 0, which means the power factor of the grid is 1. It takes 13.5 s to finish the simulation for electromag- netic model, while just 4.3 s fo r electromechanical model. Figure 7 to Figure 12 sho w some curves when the reac- tive power reference is 0. Figure 12 shows that the cur- rent and the voltage has the same phase, which means that the power factor of the grid is 1, meeting the control goal. From Figure 7, Figure 9, Figure 10, we can see that the photovoltaic p ower, t he active and reactive pow- er of the grid increase after the illumination density in- creases. In addition, Figure 7 to Figure 11 sho w that the simulations results of two models are almost the same, 00.1 0.2 0.3 0.4 0.5 0.6 0.7 0.03 0.04 0.05 0.06 0.07 Time(s) Active Gr id Po we r ( M VA) Elect r o m agnetic Elect r o m echanical Figure 7. Active power of grid. 00.1 0.2 0.30.4 0.5 0.60.7 -0.01 -0.005 0 0.005 0.01 Time ( s) Reactive o f Gr id Po wer( M v ar ) Electro magnet ic Electro mechanical Figure 8. Reactive power of grid. 0.2 0.25 0.3 0.35 -0.2 0 0.2 Time ( s) Grid Current of Pahse A(kA) Electro m agnetic Electro m echan ical Figure 9. current of phase A. 00.1 0.2 0.3 0.4 0.5 0.6 0.7 0.04 0.06 0.08 Time ( s) Photov olta ic Powe r (MV A) Electro m agnetic Electro m echan ical Figure 1 0. Photovoltaic power. 00.1 0.2 0.30.4 0.50.6 0.7 0.8 0.9 1 Time ( s) DC Bus Vo ltag e( kV) Electro m agnetic Electro m echan ical Figure 11. The DC bus voltage. 0.2 0.25 0.3 0 .35 -0.2 0 0.2 Time ( s) Voltage(kV) and Current(kA) curr en t voltage Figure 1 2. voltage and current of phase A . which means that the electromechanical transient model is valid and reasonable. 2) The reactive power reference is 0.03 Mvar. It takes 12.8 s to finish the simulation for electromag- netic model, while just 4.1 s fo r electromechanical model. The photovoltaic power, the active power of the grid and the DC bus voltage of condition 2) are similar to condi- tion 1). Figure 13 shows the reactive power of the grid, and Figure 14 shows the current and voltage, between which the phase is not the same but has an angle, mea n- ing that the grid power factor is not 1. 5. Conclusions In this paper, a general electro mechanical tra nsient model of grid-connected photovoltaic power generator is pro- posed, and both electromagnetic and electromechanical transient models are established in PSCAD. By co mpar- ing simulation results of the grid active and reactive power, the grid current, the photovoltaic power and the DC bus volt age of two model s , the correctne s s and validit y 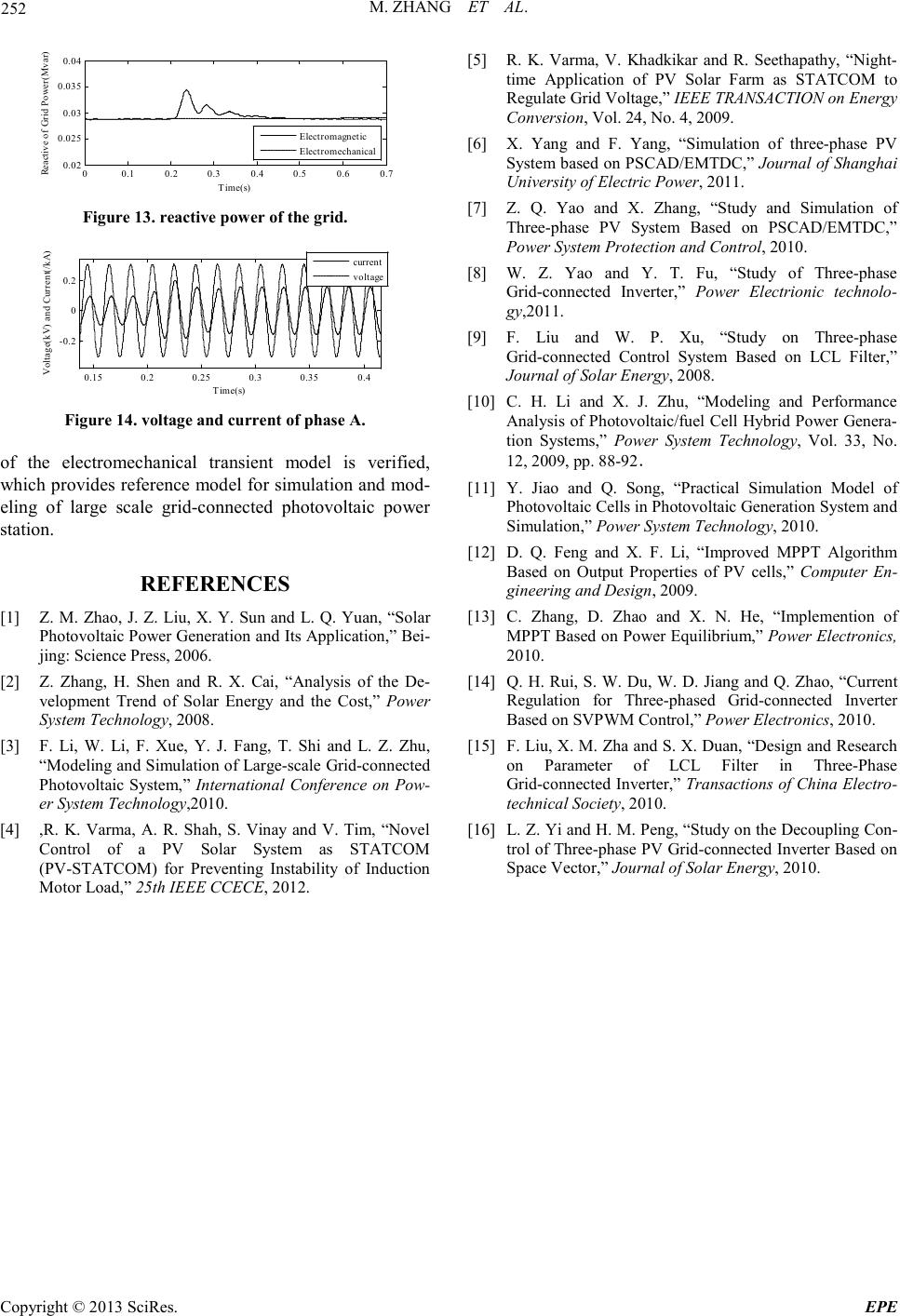 M. ZH AN G ET AL. Copyright © 2013 SciRes. EPE 252 00.1 0.2 0.30.4 0.50.6 0.7 0.02 0.025 0.03 0.035 0.04 Time ( s) Reactive o f Gr id Po wer( M v ar ) Electro m agnetic Electro m echan ical Figure 1 3. reactive power of the grid. 0.15 0.2 0.250.3 0.35 0.4 -0.2 0 0.2 Time ( s) Voltage(kV) and Current(/kA) curr en t volt age Figure 1 4. voltage and current of phase A . of the electromechanical transient model is verified, which provides reference model for simulation and mod- eling of large scale grid-connected photovoltaic power station. REFERENCES [1] Z. M. Zhao, J. Z. Liu, X. Y. Sun and L. Q. Yuan, “Solar Photovoltaic Power Generation and Its Application,” Bei- jing: Science Pres s , 2006. [2] Z. Zhang, H. Shen and R. X. Cai, “Analysis of the De- velopment Trend of Solar Energy and the Cost,” Power System Technology, 2008. [3] F. Li, W. Li, F. Xue, Y. J. Fang, T. Shi and L. Z. Zhu, “Modeling and Simulation of Large-scale Grid-connected Photovoltaic S yste m,” International Conference on Pow- er System Technology,2010. [4] ,R. K. Varma, A. R. Shah, S. Vinay and V. Tim, “Novel Control of a PV Solar System as STATCOM (PV-STATCOM) for Preventing Instability of Induction Motor Load,” 25th IEEE CCECE, 2012. [5] R. K. Varma, V. Khadkikar and R. Seethapathy, “Night- time Application of PV Solar Farm as STATCOM to Regulate Grid Voltage,” IEEE TRANSACTION on Energy Conversion , Vol. 24, No. 4, 2009. [6] X. Yang and F. Yang, “Simulation of three-phase PV System based on PSCAD/EMTDC,” Journal of Shanghai Universi ty of Electric Power, 2011. [7] Z. Q. Yao and X. Zhang, “Study and Simulation of Three-phase PV System Based on PSCAD/EMTDC,” Power System Protec t ion and Control, 2010. [8] W. Z. Yao and Y. T. Fu, “Study of Three-phase Grid-connected Inverter,” Power Electrionic technolo- gy,2011. [9] F. Liu and W. P. Xu, “Study on Three-phase Grid-connected Control System Based on LCL Filter,” Journal of Solar Energy, 2008. [10] C. H. Li and X. J. Zhu, “Modeling and Performance Analysis of Photovoltaic/fuel Cell Hybrid Power Genera- tion Sys t e m s ,” Power System Technology, Vol. 33, No. 12, 2009, pp. 88-92. [11] Y. Jiao and Q. Song, “Practical Simulation Model of Photovoltaic Cells in Photovoltaic Generation System and Simulation,” Power System Technology, 20 10 . [12] D. Q. Feng and X. F. Li, “Improved MPPT Algorithm Based on Output Properties of PV cells,” Computer En- gineering and Design, 2009 . [13] C. Zhang, D. Zhao and X. N. He, “I mp l e me ntion of MPPT Based on Power Equilibrium,” Power Electro nics, 2010. [14] Q. H. Rui, S. W. Du, W. D. Jiang and Q. Zhao, “Current Regulation for Three-phased Grid-connected Inverter Based on SVPWM Control,” Power Electronics, 2010. [15] F. Liu, X. M . Zha an d S. X. Du an , “Design and Research on Parameter of LCL Filter in Three-Phase Gri d-co nnected In verter,” Transactions of China Electro- technical Society, 2010. [16] L. Z. Yi and H. M. Peng, “Study on the Decoupling Con- trol of Three-phase P V Grid-conn ected Inverter Based on Space Vector,” Journ al of Solar Ener gy, 2010. |