Energy and Power Engineering, 2013, 5, 121-124
doi:10.4236/epe.2013.54B023 Published Online July 2013 (http://www.scirp.org/journal/epe)
Control of Unit Power Factor PWM Rectifier*
Meifang Xue, Mingzhi He
School of Electrical Engineering, Beijing Jiaotong University, Beijing, China
Email: xuemeifang12@gmail.com
Received March, 2013
ABSTRACT
To solve the problem of harmonic pollution to the power grid that caused by traditional diode rectifier and phase con-
trolled rectifier, the unit power factor PWM rectifier is designed. The topology structure of the rectifier circuit is intro-
duced and the double closed-loop control strategy in three-phase stationary coordinate system is analyzed. For the defi-
ciency of control strategy, the control strategy in two-phase synchronous rotating coordinate system is proposed. This
makes the independent control of active current and reactive current to be realized. The simulation model of the PWM
rectifier is built and the effectiveness of the control method proposed in this paper is verified by simulation.
Keywords: Control; PWM Rectifier; Unit Power Factor; d, q Coordinates
1. Introduction
Unity power factor PWM rectifier has the advantages of
high power factor, low harmonic content of grid side
current, energy bidirectional transmission etc, is widely
used in AC drive, reactive power compensation, active
power filter, unified power flow control, as well as unin-
terruptible power supply, etc[1]. This paper introduces
the topology of three-phase PWM rectifier, and describes
the control method of the rectifier in three-phase static
coordinate system. On the basis of the analysis of the
advantages and disadvantages of this control method, the
control method in two-phase synchronous rotating coor-
dinate system is put forward. Then the mathematical
model of three-phase PWM rectifier in d, q coordinates is
established and the single control of active current and
relative current is realized.
2. The Control Method of Three-phase
Voltage Source PWM Rectifier in
Three-phase Static Coordinate System
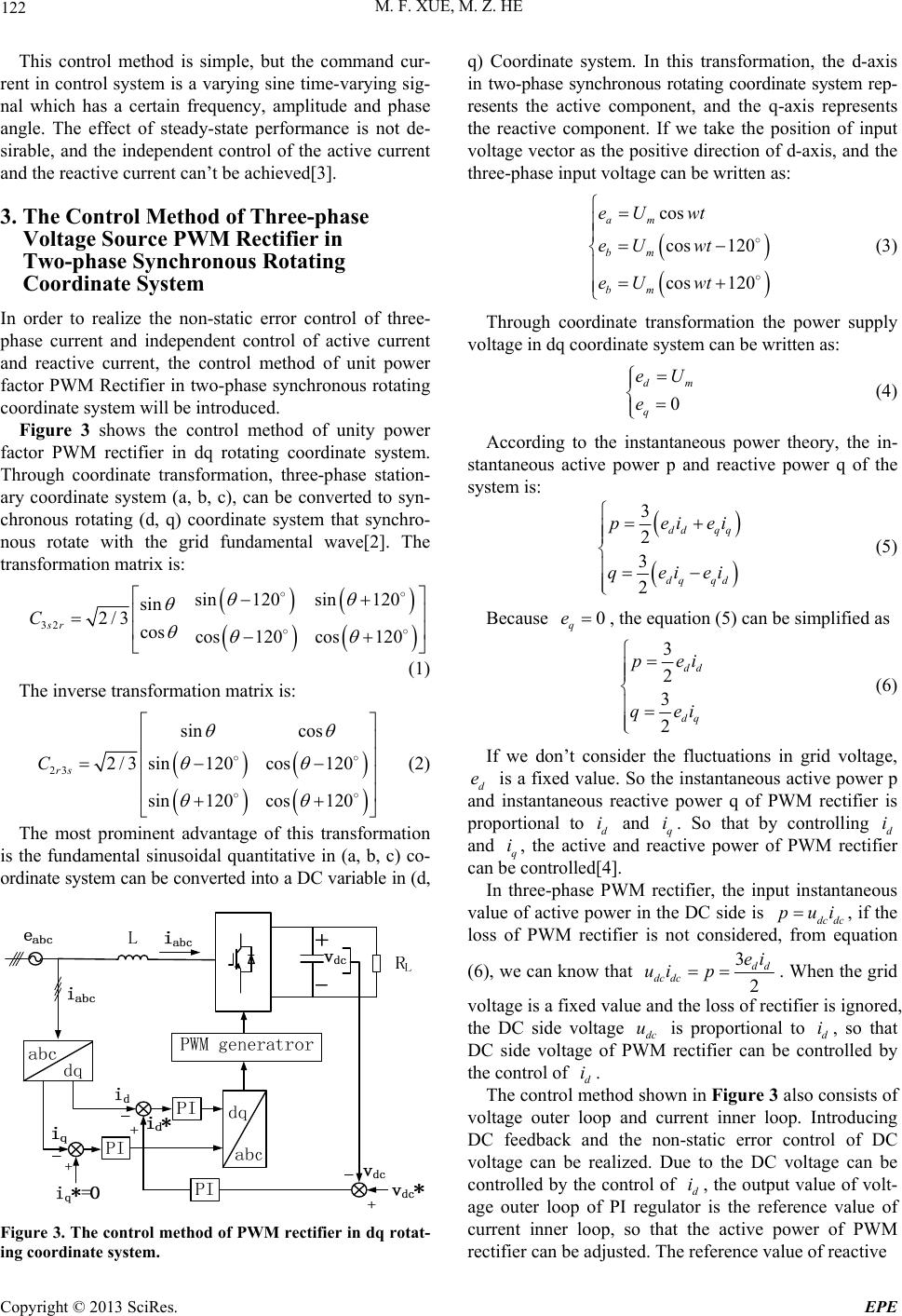
Figure 1 shows the topology of three-phase voltage source
PWM rectifier, abc
is three-phase voltage source, C is
the dc side filtering capacity and
eee
R is the load.
In order to realize the control of input current and
output voltage, the traditional method is controlling the
three-phase input current directly. The control of the in-
put current is also the control of the flow of energy, thus
the control of the output voltage can be realized. The
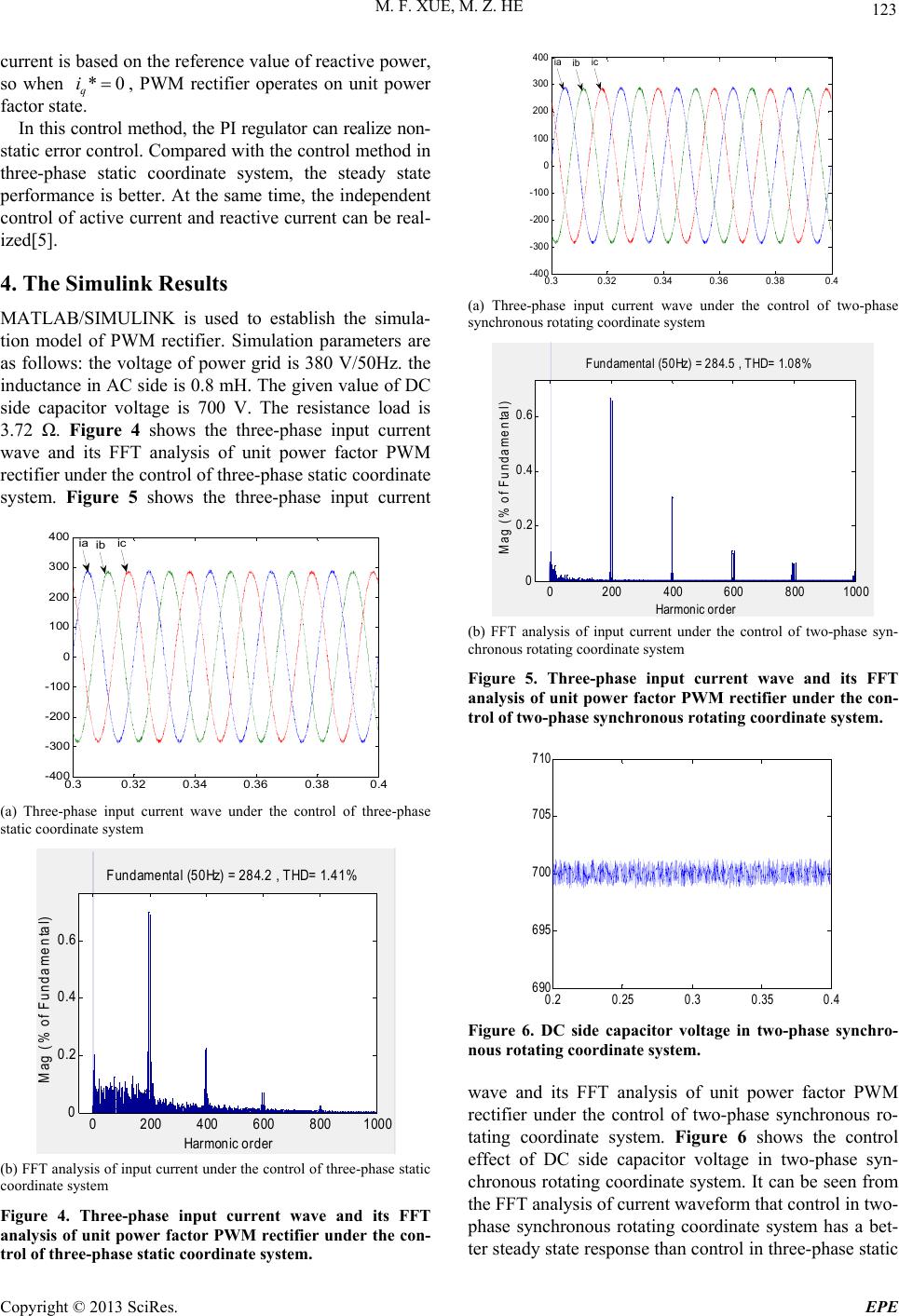
control method of PWM rectifier in the three-phase sta-
tionary coordinate system is shown in Figure 2.
In this control method, the outer loop controls the DC
voltage. The difference value of the command signal and
actual signal of DC side voltage is imported to PI regu-
lator. The output value of PI regulator is DC current sig-
nal m
, m
is proportional to the amplitude of AC input
current. So the command signal of three-phase AC cur-
rent a*
、*
b
、*
c
can be obtained by separately
multiplying m
by sinusoidal signal whose phase is the
same as three-phase voltage. The difference value of
command current and actual current is imported to PI
regulator, and the sinusoidal modulation wave can be
deserved. By comparing the sinusoidal modulation wave
with carrier wave, the PWM wave which can control the
switch can be deserved.
Figure 1. The topology of three-phase voltage source PWM
rectifier.
sin t
2
sin( )
3
t
2
sin( )
3
t
Figure 2. The control method of PWM rectifier in three-
phase stationary coordinate system.
*Project Supported by National Natural Science Foundation of China
(51207008)
Copyright © 2013 SciRes. EPE