Open Journal of Applied Sciences, 2013, 3, 41-46
doi:10.4236/ojapps.2013.32B008 Published Online June 2013 (http://www.scirp.org/journal/ojapps)
Estimation of Longitudinal Tire Force Using
Nonlinearity Observer
Suwat Kuntanapreeda
Department of Mechanical and Aerospace Engineering, Faculty of Engineering,
King Mongkut’s University of Technology North Bangkok, Bangkok, Thailand
Email: suwat@kmutnb.ac.th
Received 2013
ABSTRACT
Tire forces are the major forces propelling the road vehicles. They significantly affect the dynamic behavior of the ve-
hicles. Estimation of the tire forces is essential in vehicle dynamics and control. This paper presents an observer-based
scheme for estimation of the longitudinal tire force of electric vehicles in real time. The observer is based on a
nonlinearity observer method. The pole-placement technique is used for determination of the observer gains. Simulation
results demonstrate that the observer is able to estimate the tire force successfully. The experiments are implemented on
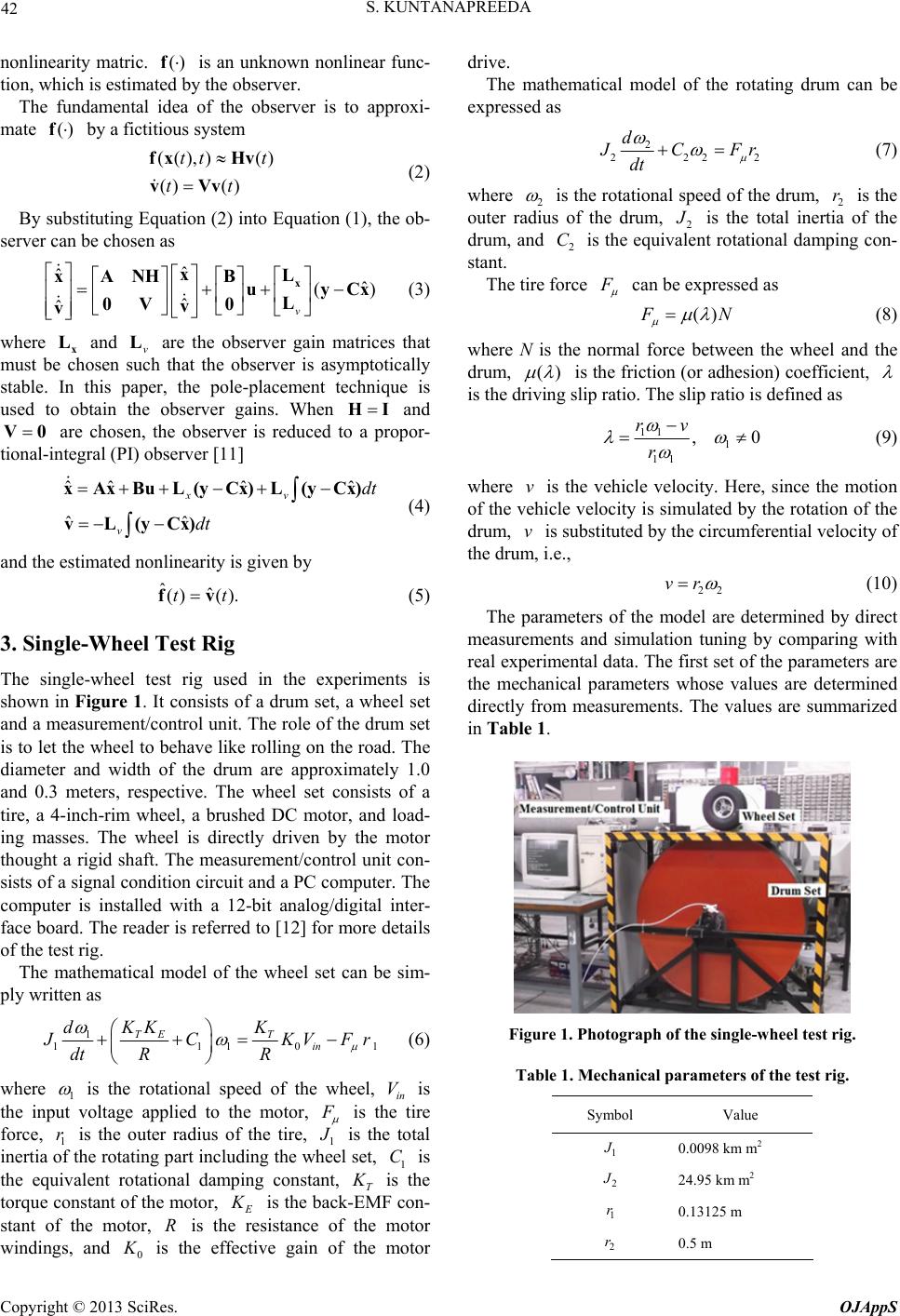
a single-wheel electric vehicle test rig. The test rig comprises an electric motor driven wheel and a free-rolling drum
simulating vehicle-on-road situations. Experimental results confirm the effectiveness of the present scheme.
Keywords: Estimation; Nonlinearity Observer; Tire Force; Traction Control; Electric Vehicles
1. Introduction
Electric vehicles (EVs) have become very attractive for
replacing conventional internal combustion engine vehi-
cles because of environmental and energy problems [1].
The research and development of EVs and hybrid EVs
have been investigated on various topics such as, for
example, propulsion systems [2], power converters [3],
and motion control [4].
Traction control plays an important role in vehicle mo-
tion control because it increases drive efficiency, safety,
and stability. Tire forces are essential in traction control.
They are the vehicular propulsive forces produced by
friction between the rolling wheel and the road surface.
The characteristic of the friction between the wheel and
the road surface is very nonlinear. It mainly depends on
the wheel slip and the tire/road surface condition. In [5],
an approach to estimate the tire-road friction during
normal drive is presented. The approach is based on a
Kalman filter to give estimates of the slip-slope. In [6],
an on-line least-squares method is used to estimate the
parameters concerned with a friction force margin. The
effect of the estimation is evaluated by applying the
method to the breaking control. A slip-based method to
estimate the maximum available tire-road friction during
breaking is developed in [7]. The method is based on the
hypothesis that the slope of the slip curve at the low-slip
region during normal driving can indicate the maximum
friction coefficient. In [8], vehicle-dynamics-based
methods for tire-road friction coefficients estimation are
reviewed. The methods include slip-slope-based, lateral-
ehicle-dynamics-based, and an EKF-based estimation
methods. In [9], three different observers are developed
for the estimation of slip ratios and longitudinal tire
forces. The observers include one that utilizes engine
torque, break torque, and GPS measurements, one that
utilizes torque measurements and an accelerometer, and
one that utilizes GPS measurements and an accelerome-
ter.
This paper presents an observer-based scheme for es-
timation of the longitudinal tire force of EVs using a
nonlinearity observer. Simulation and experimental stud-
ies are used to illustrate the effectiveness of the present
scheme. A single-wheel test rig is used as an experimen-
tal test bench.
2. Nonlinearity Observer
The nonlinearity observer developed in [10,11] is re-
viewed in this section. Consider the following nonlinear
system
()()( (),)()
() ()
tt tt
tt
t
xAxNfx Bu
yCx
(1)
where , , and are, respectively, the state vector,
the control vector, and the output vector, respectively.
, , and are, respectively, the system ma-
trix, the control input matrix, the output matrix, and the
xu
C
y
NA B
Copyright © 2013 SciRes. OJAppS