Engineering, 2013, 5, 37-42
http://dx.doi.org/10.4236/eng.2013.59B007 Published Online September 2013 (http://www.scirp.org/journal/eng)
Copyright © 2013 SciRes. ENG
High-Impedance Bus Differential Protection Modeling
in ATP/MODELS
Mardênnia T. S. Alvarenga, Priscila L. Vianna, Kleber M. Silva
Power System Protection Labora t ory, Departmen t of E lectrical En gi ne ering, University of Brasilia, Brasilia, Brazil
Email: mardennia@gmail.com
Received July 2013
Abstract
This paper presents a modeling of a high-impedance bus differential protection logic using the ATP (Alternative Tran-
sients Program) MODELS language. The model is validated using ATP simulations on an electrical system consisting
of a sectionalized bus arrangement with four transmission lines (TLs) and two autotransformers. The obtained results
validate the model and present some of the advantages of using this type of bus protection, such as fast and safe opera-
tion, even when under adverse conditions such as current transformers (CTs) magnetic core saturation upon the occur-
rence of external faults.
Keywords: Bus Protection; High-Impedance Differential Protection; ATP; MODELS
1. Introduction
The increasing demand for energy supplies and lower
fares cause the electricity sector to operate close to its
stability limits, which may compromise the safety of its
operation. In this context, the protection of electric power
system plays a key role in order to extinguish system
faults quickly and appropriately, preserving the integrity
of the system components, avoiding blackouts of major
proportions and preserving load as much as possible.
Among faults in electric apparatus, sub station (S E ) bus
deserves serious attention. Even though faults in these
components are not very common—about 5%— [1], its
effects are very harmful to the system, and can often lead
it to instability.
With respect to the station-bus protection, two tech-
niques are widely used: low impedance differential pro-
tection and high-impedance differential protection. The
second one is typically used in SEs with rated voltage
greater or equal to 500 kV, where buses have arrange-
ments with fixed topology and there are less occurrences
of switching mane uvers in CTs secondar y circuits.
Softwares traditionally used for analysis of protection
systems use component models dedicated to the analysis
of the power system at fundamental frequency. As a re-
sult, the transient performances of the protection systems
are not evaluated. In this way, EMTP (Eletromagnetic
Transient Programs) softwares have shown to be an ap-
propriate alternative for modeling and simulating protec-
tive relays, since they use more thorough models of the
sys te m co mponents and provide suitable environments to
link user -defined numeric relays models.
In the state-of-art of relay modeling in EMTP software,
most papers on the subject deal with the transmission
lines (TL) distance protection [2-5]. In [2], a distance
relay is modeled in EMTP program and its performance
is compared with the one of a manufactured relay. In [3]
and [4], distance protection schemes applied to three
terminals line and double circuit lines are evaluated, re-
spectively. In both researches, the relay is modeled with
the use of MODELS language of ATP. In [5], a Visual
C++ based program is implemented to obtain the FOR-
TRAN code that represents the functional blocks of the
relay, which is incorporated in a PSCAD/EMTDC simu-
lation.
To the authors’ best knowledge, there are no papers in
the state-of-art that present high-impedance bus differen-
tial protection modeling and simulation in EMTP soft-
wares, which became the motivation and objective for the
development of this paper: propose, implement and vali-
date a high-impedance bus differential protection model in
ATP for use in power system protection schemes analysis.
The proposed model of the numerical differential pro-
tection was done using MODELS language of ATP and
can be divided into four modules: signal condition, data
acquisition, phasor estimation and differential analysis.
The first one implements the model of an anti-aliasing
analog filter. The second one implements the models of
the Sample/Holder and A/D Converter. In the third mod-
ule, the phasor’s amplitude and argument are calculated
in the fundamental frequency. Finally, the high-impedance
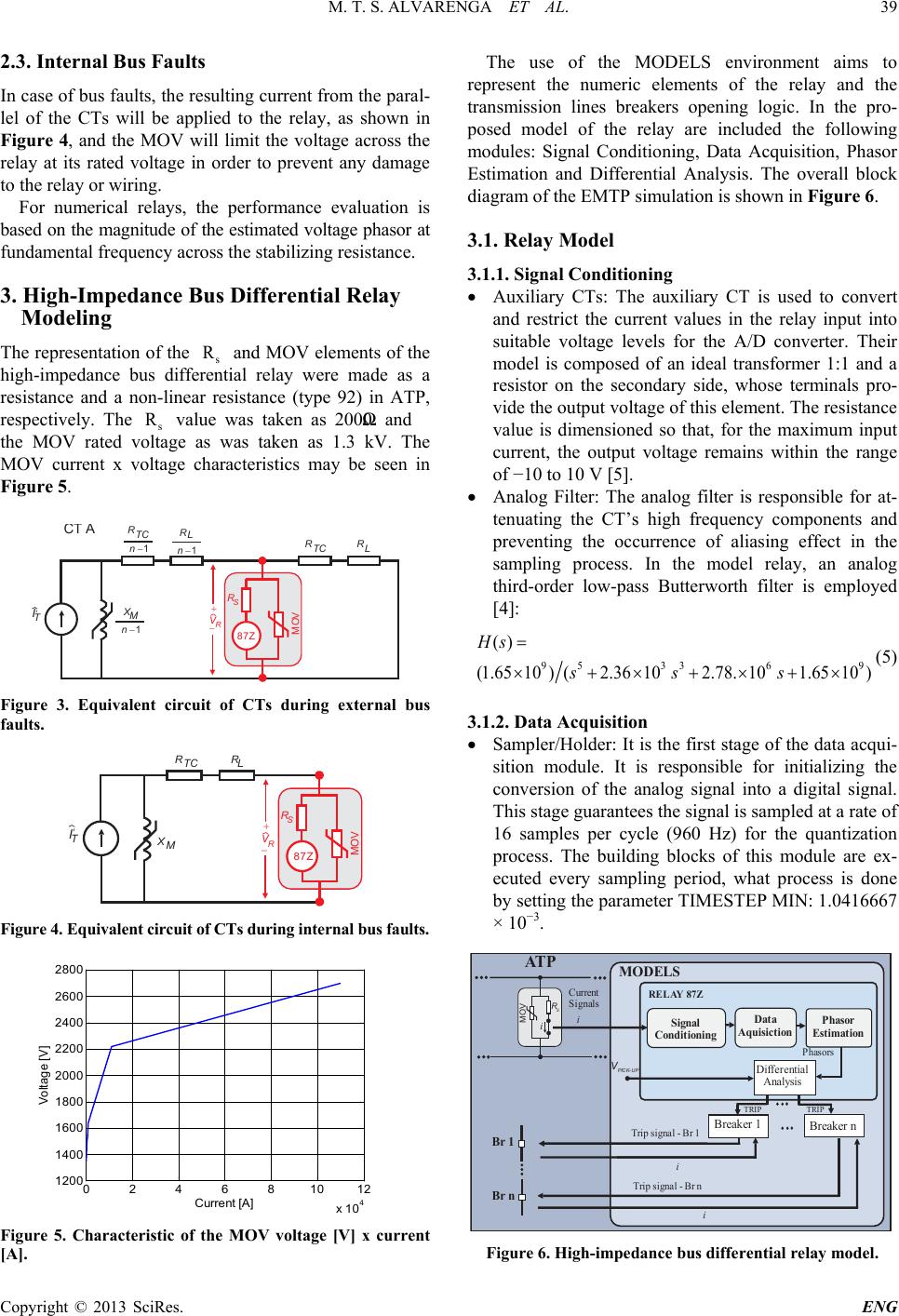
bus differential protection logic is implemented in the