Communications and Network, 2013, 5, 666-670
http://dx.doi.org/10.4236/cn.2013.53B2119 Published Online September 2013 (http://www.scirp.org/journal/cn)
Channel Estimation for SCM-OFDM Systems by Modified
Kalman Filter*
Tao Peng1, Yue Xiao1, Shaoqian Li1, Huaqiang Shu2, Eric Pierre Simon2
1Nation Key Lab of Sci. and Techno. On Commun., University of Electronic Science and Technology of China, Chengdu, China
2IEMN Lab, TELICE Group University of Lille, Lille, France
Email: tpeng.cn@gmail.com
Received July 2013
ABSTRACT
In this paper, the problem of channel estimation for superposition coded modulation-orthogonal frequency division
multiplexing (SCM-OFDM) systems over frequency selective channels is investigated. Assuming that the path delays
are known, a new channel estimator based on modified Kalman filter algorithms is introduced for the estimation of the
multipath Rayleigh channel complex gains (CG). In the simulation, the mean square error (MSE) and bit-error-rate
(BER) performances are given to verify the effectiveness of the Kalman estimation algorithms for SCM-OFDM sys-
tems.
Keywords: Superposition Coded Modulation (SCM); Orthogonal Frequency Division Multiplexing (OFDM); Channel
Estimation; Kalman Filter
1. Introduction
As a kind of non-orthogonal multiple access scheme,
interleave division multiple access (IDMA) was devel-
oped by Ping et al. [1,2], in which random interleavers
were employed as the only means of user separation. In
general, IDMA outperforms conventional code division
multiple access (CDMA) in terms of power and band-
width efficiency. The key innovation of IDMA is the
introduction of low-rate channel coding, chip-level inter-
leaving and low-complexity multiu s e r detection.
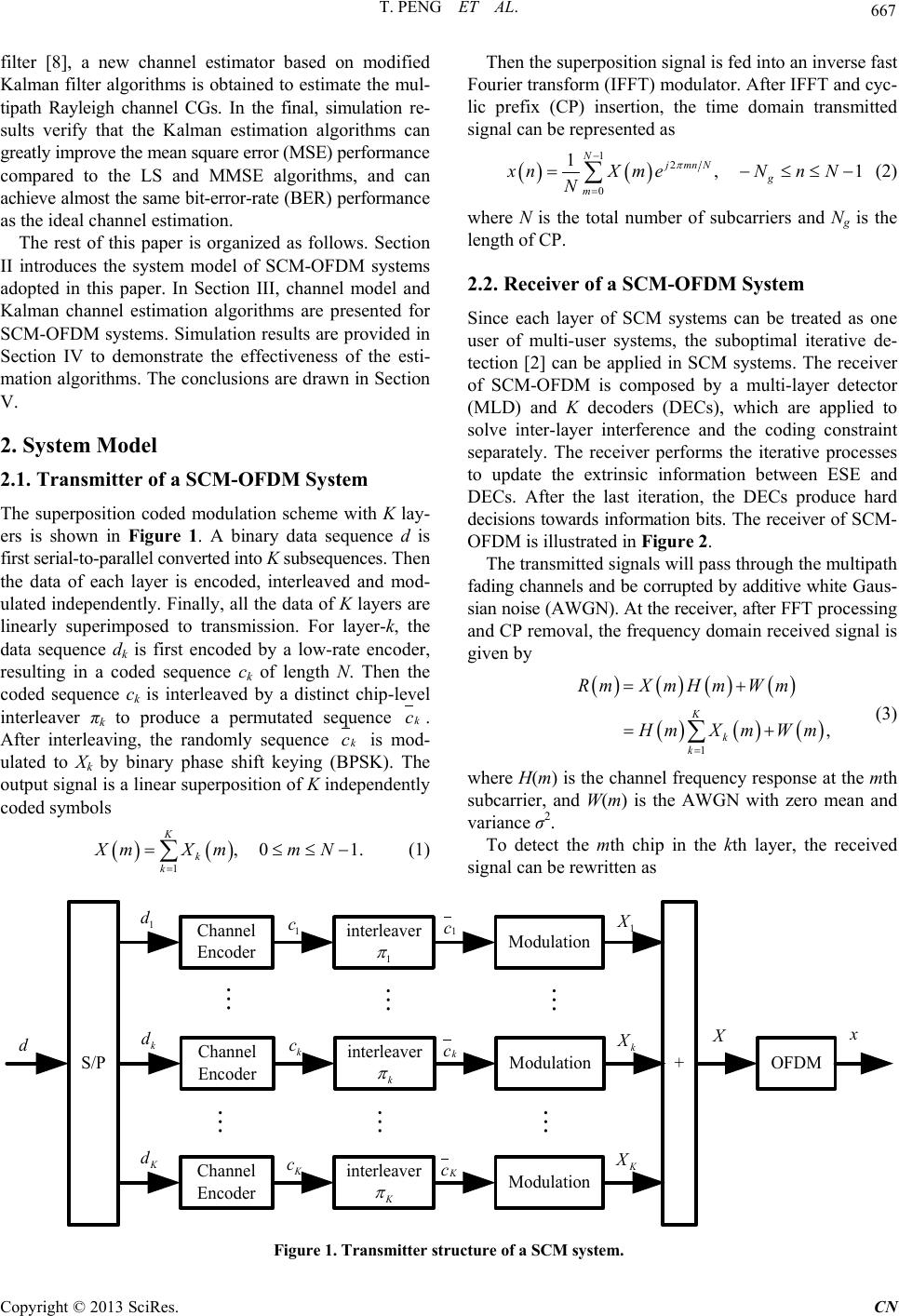
Motivated by the concept of IDMA, superposition
coded modulation (SCM) partitions the data to multi layer,
where each layer is treated by a user equivalently. The
low-rate encoder for all layers is typically identical, and
the interleaver of every layer is distinct, which is used to
combat the inter-layer interference. SCM has several ad-
vantages over conventional coded modulation schemes
such as trellis-coded modulation (TCM) and bit-inter -
leaved coded-modulation with iterative decoding (BICM-
ID). First, the transmitted signal of SCM can be approx-
imated as a Gaussian variable according to the central
limit theorem. Second, for adaptive modulation, the rate
adaptation can be simply realized in SCM by adjusting
the number of layers. Furthermore, a low-cost chip-by-
chip iterative detection a lgorithm can be adopted in SCM,
where the complexity is independent of the number of
layers [3,4]. Furthermore, SCM can be combined with
orthogonal frequency division multiplexing (OFDM) to
combat the frequency selective fading and improve the
throughput [5].
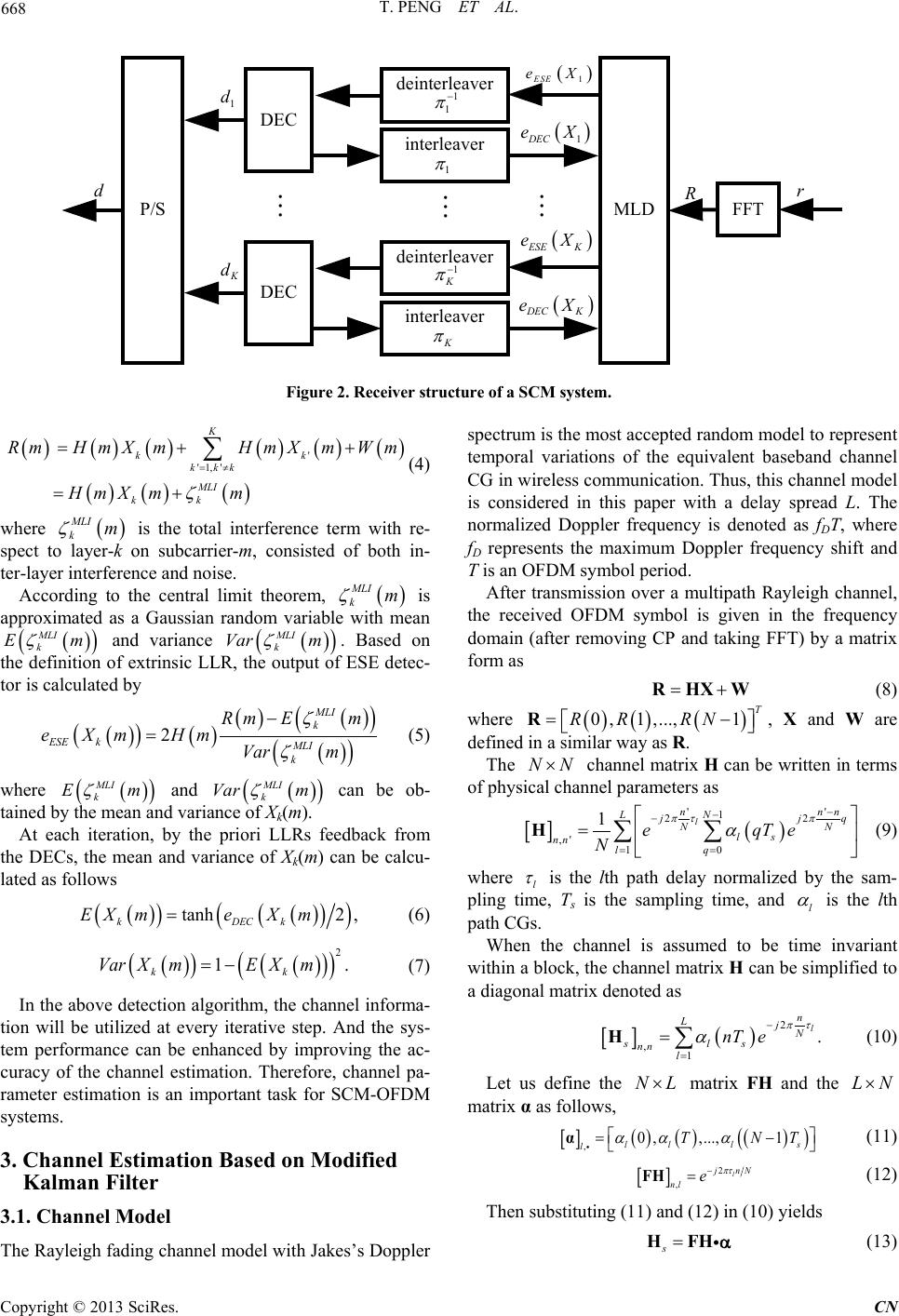
For signal detection in the receiver, reliable channel
information is needed. There have only been few litera-
tures regarding channel estimation for IDMA and SCM
systems. For example, least square (LS) and minimum
mean square error (MMSE) algorithms are employed to
estimate channel response of IDMA systems [6,7]. How-
ever, these estimation algorithms perform per-user chan-
nel estimation using pilot symbols in the frequency do-
main, which lead to poor estimation performance.
To alleviate this problem, channel estimation for SCM-
OFDM systems is investig ated in this paper. The estima-
tion of physical channel parameters includes estimating
multipath delays and multipath complex gains (CGs). It
is well known that the path delays are quasi-invariant
over several OFDM blocks whereas the CGs may change
significantly even within one OFDM block. Therefore, the
delays are assumed to be perfectly estimated and only the
problem of CGs estimation is considered in this paper.
Due to the excellent estimation performance of Kalman
This work was supported by the Foundation Project of National
Key
Laboratory of Science and Technology on Communications under
Grant 9140C020404120C0201, National High
-
Tech R&D Program
of China (
“863” Project under Grant number 2011AA01A105), N
onal Grand Special Science and
Technology Project of China under
Grant No. 2010ZX03006
-002-
02, and the Fundamental Research
Funds for the Central Universities.
Copyright © 2013 SciRes. CN