P. DAHAL ET AL.
Copyright © 2013 SciRes. CN
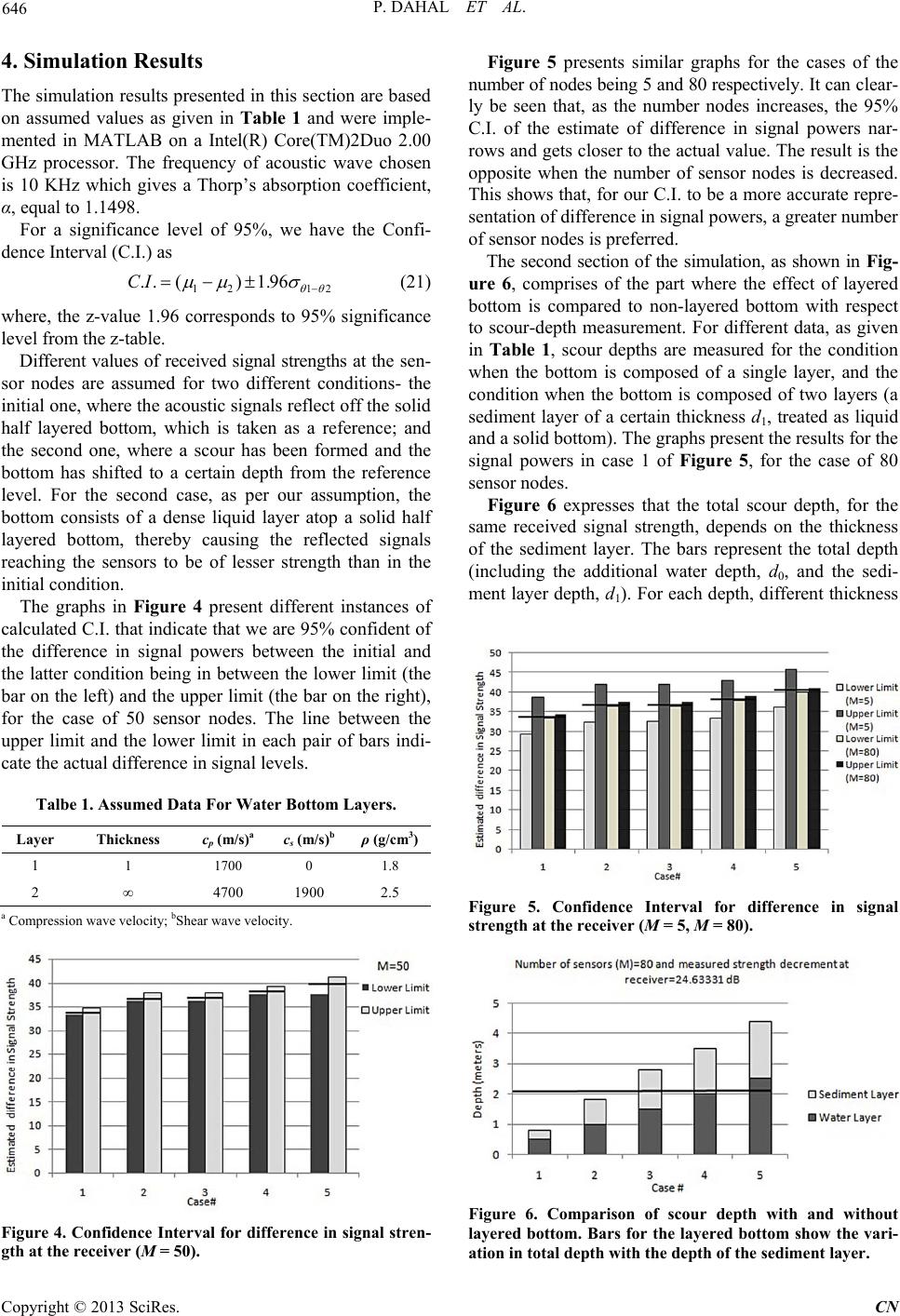
of the sediment layer is considered and the water depth is
calculated to account for the total loss in signal strength
as compared to the reference level. As the sediment layer
depth increases (shown by the lower portion of the bars),
the corresponding water layer depth also increases, thus
increasing the total scour depth. For instance, for a 24.63
dB signal loss measured at the receiver (with respect to
the condition when no scour was formed), an assumption
of 0.5 meters sediment layer thickness leads to a total
scour depth of approximately 0.8 meters. Likewise, for
the same signal loss measured, assuming a sediment layer
depth of 2 meters gives a total scour depth of around 1.8
meters.
However, the scour depth without considering the
layered approach (when the bottom is a single layered
half space), as shown by the straight line in Figure 6, is
constant and seems to deviate from the depths calculated
for a layered bottom. This shows that the single layered
approach, which is inconsistent with the real underwater
scenario as pointed out in literature, gives misleading
values for scour depth and the effect of sediment layer
thickness on scour depth cannot be neglected. The for-
mation of dense sediment layer above solid water bottom
results in different val ue s of scour depth.
5. Conclusion
Scour holes that ten d to make bridge foundatio ns weaker
to collapses sh ould be accurately measured. W e have suc-
cessfully shown the RSS for acoustic sensor networks.
Unlike ToF or ToA methods for range measurement in
underwater environment, in this paper we provided RSS
approach to measuring bridge scour depth. Simulations
show that the estimation of scour depth tends to approach
the real depth as the number of acoustic sensors em-
ployed is increased. Also, since in real underwater condi-
tions, erosion of sediments leads to the formation of a
dense water layer over the water bottom due to the dis-
solved sediments, an effort is made to compare the effect
of layered nature of water bottom on scour depth to that
of non-layered approach- the layered approach giving
more accurate values for scour depth. For instance, as
seen in the simulations, a sediment layer depth of 1.5
meters results in a total scour depth of 2.8 meters and this
value increases with the thickness of the sediment layer.
In contrast, when the sing le layered bottom is considered,
the resultant scour depth is about 2 meters. However,
since a single layered bottom assumption is fairly unrea-
listic, the result obtained could be misleading.
6. Acknowledgments
This work was sponsored in part by an Interdisciplinary
Research Grant of the University of Nebraska-Lincoln.
REFERENCES
[1] A. M. Shirhole and R. C. Holt, “Planning for a Compre-
hensive Bridge Safety Program,” Transportation Research
Record No. 1290, Transportation Research Board, Na-
tional Research Council, Washington, D.C., 1991.
[2] P. F. Lagasse, E. V. Richardson, J. D. Schall and G. R.
Price, “Instrumentation for Measuring Scour at Bridge
Piers and Abutments,” National Cooperative Highway
Research Program (NCHRP) Paper No. 396, Transporta-
tion Research Board, National Research Council, Wash-
ington, D.C., 1997.
[3] N. E. Yankielun and L. Zabilansky, “Laboratory Investi-
gation of Time-Domain Reflectometry System for Moni-
toring Bridge Scour,” Journal of Hydraulic Engineering,
Vol. 125, No. 12, 1999, pp. 1279-1284.
http://dx.doi.org/10.1061/(ASCE)0733-9429(1999)125:12
(1279)
[4] Y. B. Lin, J.-C. Chen, K.-C. Chang, J.-C. Chern and J.-S.
Lai, “Real Time Monitoring of Bridge Scour Using Fiber
Bragg Grating Sensors,” Smart Materials and Structures,
Vol. 14, No. 4, 2005, pp. 664-670.
http://dx.doi.org/10.1088/0964-1726/14/4/025
[5] J. -Y. L u, J. -H. Hong, C. -C. Su, C. -Y. Wang and J. -S.
Lai, “Field Measurements and Simulation of Bridge
Scour Depth Variation During Floods,” Journal of Hy-
draulic Engineering, Vol. 134, No. 6, 2008, pp. 810-821.
http://dx.doi.org/10.1061/(ASCE)0733-9429(2008)134:6(
810)
[6] N. B. Priyantha, A. Chakraborty and H. Balakrishnan,
“Cricket Location Support System,” Proceedings of the
Annual International Conference on Mobile Computing
and Networking, MOBICOM, 2000, pp. 32-43.
[7] J. Heidemann, W. Ye, J. Wills, A. Syed and Y. Li, “Re-
search Challenges and Applications for Underwater Sen-
sor Networking,” IEEE Wireless Communications and
Networking Conference, WCNC, Vol. 1, 2006, pp. 228-
235.
[8] G. Mao, B. Fidan and B. D. Anderson, “Wireless Sensor
Network Localization Techniques,” Computer Networks,
Vol. 51, No. 10, 2007, pp. 2529-2553.
http://dx.doi.org/10.1016/j.comnet.2006.11.018
[9] M. Erol, L. Vieira, A. Caruso, F. Paparella, M. Gerla and
S. Oktug, “Multi Stage Underwater Sensor Localization
Using Mobile Beacons,” Second International Confe-
rence on Sensor Technologies and Applications, 2008.
SENSORCOMM ‘08, 2008, pp. 710-714.
[10] E. Kim, S. Woo, C. Kim and K. Kim, “Lamsm: Localiza-
tion Algorithm with Merging Segmented Maps for Un-
derwater Sensor Networks,” Lecture Notes in Computer
Science (including subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics), Vol.
4809 NCS, 2007, pp. 445-454.
[11] M. Hosseini, H. Chizari, C. K. Soon and R. Budioarto,
“RSS-Based Distance Measurement in Underwater Acou-
stic Sensor Networks: An Application of the Lambert W
Function,” Proceedings of the 4th International Confe-
rence on Signal Processing and Communication Systems,
ICSPS, Gold Coast, 2010, pp. 1-4.
[12] P. Etter, “Underwater Acoustic Modeling and Simulation,”