 American Journal of Operations Research, 2013, 3, 421-430 http://dx.doi.org/10.4236/ajor.2013.35040 Published Online September 2013 (http://www.scirp.org/journal/ajor) Several New Line Search Methods and Their Convergence Zhenjun Shi1, Kimberly Kendricks1, Zhiwei Xu2, Y on gn ing Tang3 1Department of Mathematics and Computer Science, Central State University, Wilberforce, USA 2Department of Computer and Information Science, The University of Michigan, Dearborn, USA 3School of Information Technology, Illinois State University, Normal, USA Email: zshi@centralstate.edu, kkendricks@centralstate.edu, zwxu@umich.edu, ytang@ilstu.edu Received September 28, 2012; revised January 7, 2013; accepted January 14, 2013 Copyright © 2013 Zhenjun Shi et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT In this paper, we propose several new line search rules for solving unconstrained minimization problems. These new line search rules can extend the accepted scope of step sizes to a wider extent than the corresponding original ones and give an adequate initial step size at each iteration. It is proved that the resulting line search algorithms have global con- vergence under some mild conditions. It is also proved that the search direction plays an important role in line search methods and that the step size approaches mainly guarantee global convergence in general cases. The convergence rate of these methods is also investigated. Some numerical results show that these new line search algorithms are effective in practical computation. Keywords: Unconstrained Minimization; Line Search Method; Global Convergence; Convergence Rate 1. Introduction Consider an unconstrained minimization problem min ,, n xxR (1) where is an n-dimensional Euclidean space, n R1 :n RR a continuously differentiable function. Throughout this paper, we use xfx as the gradient function of x. Given an initial point 0 , line search methods for solving (1) take the form 1,0,1,2, kkkk xx dk, (2) where k is the current iterate, k a search direction, and d k a step size. Let * be a minimizer of (1) and thus be a stationary point that satisfies *0gx . We denote k x by , k f * x by * , and k x by k , respectively. In line search methods, there are two things to do at each iteration. One thing is to find a search direction k, and the other is to choose the step size d k along the search direction . k On the one hand, the search direction is generally required to satisfy the descent condition d k d 0, T kk gd (3) which guarantees that k is a descent direction of d x at k . In order to ensure the global convergence of line search methods, we often require that the follow- ing condition holds, , T kk kk gd c gd (4) where 0,1c is a constant. The condition (4) is sometimes called the angle property (e.g., [1,2]). The choice of search direction k plays an important role in designing line search methods (e.g., [3]). There are many techniques for choosing the search direction at the kth iteration (e.g., [2,4,5]). d k d On the other hand, we should choose k to satisfy some line search rules. Line search rules can be classified into two types, exact line search rules and inexact line search rules. This paper is devoted to the case of inexact line search rules. There are three well-known inexact line search rules [6-9]. Armijo rule. Set scalars >0, 0,1 k s , and 0,1 2 . Choose k to be the largest in 2 ,, ,, kk k ss s such that . T kkk kk fx dgd (5) Remark. The original Armijo line search rule is to set k s with being a constant [8]. Goldstein rule. A fixed scalar 1 0, 2 is selected, C opyright © 2013 SciRes. AJOR  Z. J. SHI ET AL. 422 and k is chos en to satisfy 1 kkk k T kkk fxd f gd . (6) It is possible to show that if is bounded below, then there exists an interval of step sizes k f for which the relationships above are satisfied, and there are fairly simple algorithms for finding such a step size through a finite number of arithmetic operations. Wolfe Rule. Choose k to satisfy T kkkk kkk fx dgd (7) and , TT kkkk kk xddgd (8) where and are some scalars with 1 0, 2 and . ,1 Lemma 1.1 ([1]) For the Wolfe rule, we assume that there is a scalar such that xM for all n R. Let 1 0, 2 and , and assume that . Then there exists an interval ,1 <0 T kk gd 12 ,bb with , such that every 1 0b 2 b 12 ,bb satisfies (7) and (8). The above three line search rules can guarantee the existence of k under some mild conditions. However, how to find k is still a question. Especially, how to choose the initial step size k in the Armijo rule is also very important in practical computation. In fact, how to solve the inequalities (6), (7), (8) is also a problem in computation. Some implementable modified Armijo ru- les were proposed [10-13]. Moreover, some nonmono- tonic line search methods were also investigated [14-17]. However, can we find an approach to solve (6), (7), and (8) easily and economically? Sometimes, we first set an initial step size k and substitute the test step size k into the inequalities (6), (7), or (8); if this satisfies the inequalities, then we stop and find a step size k ; otherwise, we need to use back-tracking or for- ward-tracking to adjust the test step size until we find an accepted step size k . In order to find k easily and economically, we need to solve three problems. One problem is how to estimate the initial step size k . The second problem is how to adjust the test step size when the test step size doesn’t satisfy the inequalities. The third problem is whether we can extend the accepted scope of step sizes to a wider extent. Our research is focused on the second and third questions. In this paper, we propose several line search rules for solving unconstrained minimization problems. The modi- fied line search rules used in the methods can extend the range of acceptable step sizes and give a suitable initial step size at each iteration. It is proved that the resulting line search methods have global convergence under some mild conditions. It is also proved that the search direction plays an important role in line search methods and that the step size rule mainly guarantees the global conver- gence in general cases. Numerical results show that the resulting algorithms are effective in practical computa- tion. The remainder of the paper is organized as follows. In Section 2, we describe the modified line search rules and its properties. In Section 3, we analyze the global con- vergence of resulting line search methods, and in Section 4, we study further the convergence rate of the new line search methods. Numerical results are reported in Sec- tion 5. 2. Modified Line Search Rules We first assume that (H1). The function has a lowe r bound on f 000n n LxRfxfx , where R is given. (H2). The gradient xfx is uniformly con- tinuous in an open convex set B that contains . 0 L Sometimes, we further assume that (H3). The gradient is Lipschitz continuous in an open convex set B that contains , i.e., there exists such that 0 L 0L ,, . xgy LxyxyB (9) It is apparent that (H3) implies (H2). In the following three modified line search rules, we define 1 min,, 2 T kk kk k gd wd d (10) where 0, is a variable. Modified Armijo Rule. Set scalars 0, 0,1 k L and 1 0, 2 , and set 2. T kk k kk gd sLd Let k be the largest in 2 ,, ,, kk k ss s such that . kkk kk ffx ddw (11) Modified Goldstein Rule. A fixed scalar 1 0, 2 is selected, and k is chosen to satisfy 1. T kkkkkkkkkkk gdffxddw (12) Modified Wolfe Rule. The step size k is chosen to Copyright © 2013 SciRes. AJOR  Z. J. SHI ET AL. 423 satisfy kkkkkkk ffx ddwk (13) and , TT kkkk kk xddgd (14) where and are some scalars with 1 0, 2 and . ,1 Apparently, if k satisfies (5), or (6), or (7) and (8), then k also satisfies (11), or (12), or (13) and (14). We may obtain the conclusion from the fact that . T kkk kkkk dw gd Therefore, if (H1) holds, then the three modified line searches are feasible. As a result, the modified line searches can extend the range of acceptable step sizes k . For the above three modified line search rules, we de- note the three corresponding algorithms by Algorithm (NA), Algorithm (NG), and Algorithm (NW), respec- tively. 3. Global Convergence In this section, we will prove that if (H1) and (H2) hold, k satisfies (3), k d is chosen so that (11), or (12), or (13) and (14) hold. The related algorithms generate an infinite sequence k , then lim 0. T kk kk gd d (15) Theorem 3.1 Assume that (H1), (H2), and (3) hold, k L satisfies with and 00 0k mLM0 m0 being positive numbers. Algorithm (NA) with modified Armijo rule generates an infinite sequence k . Then (15) holds. Proof. For Algorithm (NA), by setting 12 ,, kk kk ksKks and by (11), we have 11 , kkk kkk, fsdwskK (16) 12 , kkk kkk. fdwk K (17) Since k is the largest one to satisfy the modified Armijo rule, we will have 2 , kk k kK , and then k makes the inequality sign of (11) change, i.e., 2 ,. kkkkkkkk fxddwk K By the mean value theorem on the left-hand side of the above inequality, we can find 0,1 k such that 2 ,. T kkkkk k kkkk kkkk T kk k gxd d ffxd dw gdk K Therefore, 2 ,. TT kkkkk kk xddgdkK (18) By (H1), (3), and (11), it follows that k is a non- increasing number sequence and bounded from below, and it has a limit. Furthermore, we get from (11) that 0, kkk k k dw (19) and thus, 12 . kkkkkkk k kK kK sdws dw (20) In order to prove (15), we use contrary proof to ab- surdity. Assume that there exists an and an infi- nite subset 0 30,1,K such that 3 ,. (21) T kk k gd kK d Since 12 0, 1,KK 3 , it is obvious that at least one of 1 K or 23 K is an infinite subset. If 12 K is an infinite subset then by (21) and (20) we have 13 13 1 12 00 min , 2 . kK K kkkk kK K kkkk kK kkkkkkk k kK kK MM sdws sdws sdws dw The contradiction shows that 13 K is not an infi- nite subset and 23 K must be an infinite subset. By (21) and (20), we have 23 23 2 12 1 min , 2 . kk kk kK K kkk k kK K kkk k kK kkkkkkk k kK kK dd dw dw sdws dw Therefore, Copyright © 2013 SciRes. AJOR  Z. J. SHI ET AL. 424 23 0 kk dkKK . (22) By the Cauchy-Schwartz inequality and (18), we ob- tain 23 1, kkkk k kkkkkk k T kkkk kk k T kk k gxd g . xdg d d xdg d gd kK K d d By , (22), and the above inequality, we have 2)(H 23 0, T kk k gd kK Kk d , which also contradicts (21). The contradiction shows that (15) holds. Theorem 3.2 Assume that (H1), (H2), and (3) hold. Algorithm (NG) with the modified Goldstein line search generates an infinite sequence k . Then (15) holds. Proof. By using the mean value theorem on the left- hand side inequality of (12), there exists 0,1 k such that 11 TT kkkkkkkk kkk , xddff g d . and thus, 1 TT kkkkk kk xdd g d (23) By the right-han d side of (12) and (H1), it follows that k is a monotone decreasing sequence and bounded below, and thus it has a limit. This shows that 0 . kkk k k dw (24) Using the contrary proof, if (15) doesn’t hold, then there exists an infinite subset and an 0,1,K 0 such that ,. (25) T kk k gd kK d By (25) and (24), we obtain 0 1 min , 2 , kkkk kK kkkk kK kkk k k dd dw dw and thus, 0, . (26) kk dkKk By the Cauchy-Schwartz inequa lity and (23), we have . kkkk k kkkkk k k T kkkk kk k T kk k gxd g xdgd d xdgd d gd d By (26) and (H2), and noting that 0, kkkkk dd kKk and the above inequality, we have 0, T kk k gd kKk d , which contradicts (25). The contradiction shows that (15) holds. Theorem 3.3 Assume that (H1), (H2), and (3) hold. Algorithm (NW) with modified Wolfe rule generates an infinite sequence k . Then (15 ) ho lds. Proof. Using contrary proof, if (15) doesn’t hold, then there exists an infinite subset and an such that (25) holds. By (H1) and (13), it follows that (24) holds, and thus (26) holds. 0,1,K 0 By the Cauchy-Schwartz inequa lity and (14), we have 1 11 1. kk TT kkkkkk kk kk gg ggdggd k d dd d By (H2), (26), and the above inequality, we have 0, T kk k gd kKk d, which is a contradiction to (25). The contradiction shows that (15) holds. Theorem 3.4 Assume that (H1), (H3), and (3) hold, Algorithm (NA) with 00 0k mLM , or Algorithm (NG), or Algorithm (NW) generates an infinite sequence k . Then there exists and 10,1,k00 such that 2 10 1 ,. T kk kk k gd fkk d (27) Proof. Since (H3) implies (H2), the conclusions in Theorems 3.1, 3.2, and 3.3 are also true. We will use these conclusions and notations in the proofs of these theorems to our proof. For Algorithm (NA), by (H3), the Cauchy-Schwartz Copyright © 2013 SciRes. AJOR  Z. J. SHI ET AL. 425 inequality, and (18), we have 2 2 1,, kkkkkk k T kkk kk T kk Ldg xdgd xdgd gdk K where 2 and k are defined in the proof of Theorem 3.1. Thus, 2 2 1, T kk k k gd kK Ld . (28) By (17), (28), and the proof of Theorem 3.1, we ob- tain 2 1 11 min ,1, 2 T kk kk k gd ff LLd 1 . (29) where By (16) and the proof of Theore m 3.1, we have 2 ,kKkk 2 111 00 1 min,1,,, 2 T kk kk k gd fkK MMd kk (30) where 1 is defined in the proof of Theorem 3.1. Set 0 00 11 minmin,1 ,min,1, 22LLMM it follows that (27) holds. For Algorithm (NG), by (H3), the Cauchy-Schwartz inequality, and (23), we have 2 , kkkkkkk k T kkkk kk T kk Ldgxdgd xdg gd d and thus, 2. T kk k k d Ld (31) By (12), (31), and Theorem 3.4, we have 2 2 11 min ,1,. 2 T kk kk k gd f LLd kk By setting 2 0min,1 , 2LL it follows that (27) holds. For Algorithm (NW), by (H3), the Cauchy-Schwartz 2 1T kk . k k d Ld (32) By (13), (32), and Theorem 3.1, we have inequality, and (14), we can prove that 2 11T gd 11 min,1, . 2kk kk k fkk LLd (33) By setting 0 11 min,1 , 2LL it follows that (27) holds. that (H1), (H2), and (4) hold, Theorem 3.5 Assume Algorithm (NA) with 00 0k mLM , or Algorithm (NG), or Algorithm (NW)finite sequence generates an in k . Then lim 0. k kg (34) Proof. By Theorems 3.1, 3.2, and (1 3.3, we obtain that 5) holds. By (4), when k, we have 22 22 20. TT gdgd kk kk kk kk k cg g dg d Therefore, (15) holds. that (H1), (H3), and (4) hold, ACorollary 3.1 Assume lgorithm (NA) with 00 0k mLM , or Algorithm (NG), or Algorithm (NW)finite sequence generates an in k . Then (34) holds. oof. By Theorem 3.5 and (4), we have Pr 2 T kk gd ff 10 2 22 2 00 kk k T kk kk kk d gd gc g dg By (H1) and the above inequality, we obtain that (34) ho vergence rate, we restrict our um . lds. Remark: Because (H3) implies (H2), it is obvious that the conditions of Corollary 3.1 imply the conditions of Theorem 3.5. Thus, Corollary 3.1 holds. 4. Convergence Rate In order to analyze the con discussion to the case of uniformly convex objective functions. We further ass ume that (H4): f is twice continuously differentiable and uni- fonvrmly coex on n R. Lemma 4.1 Asse that (H4) holds. Then (H1) and (H3) hold, x has a unique minimizer * , and there exists 0< mM such that 22 ,, ; Tn myyMyxy R (35) 2f xy Copyright © 2013 SciRes. AJOR  Z. J. SHI ET AL. 426 22 *** 11 ,; 22 converges to * at least -linearly. From the last inequality, we g thatQ et k n x R mxxf xfxMxx (36 converges to * ) 2, T2 xygx gyxymxy at least -linearly [18 R]. By setting (37) ,; n yR where and thus 22 *** ,. n T xx xxx gmxxxR (38) By (37) and (38), we can also obtain from the Cau Schwartz inequality that chy- xygxgymxy (39) and ** ,. n xxgxmxxxR (40) Its proof can be seen from (e.g., [18,19], etc.). case, the Lipschitz constant of the gradient function In this L x is . Theorem 4.1 Suppose thaH4) and (4) hold, any of e algtht ( the threorims generates an infinite sequen ce k . Then k converges to * at least R-linearly. Proof. By Corollary 3.1 and Lemma 4.1, it follow k s that erges to * conv . By Theorem 35, (4) and .(40), we have 2 T kk f10 2 2 0 2 2 22 2* 00 22 * 0 2. kk k T kk k kk kk k gd fd gd g gd cgcmx x cm ffx M By the above inequality and setting 22 0 2cm M , we can prove that 1 . In fact, by Td heorem 3.5 an (39), and noting th, we can obtain at LM 0, LM (41) and thus, 22 22 22 02 2221 cm cm c. By setting 2 1 , we have * From the above first inequality, we can say that * * 2*2 10 1 . k k x ffxffx 2 1kk fff fx k * 0 2 fx m , it follows that * 2 *2 2ffx x f0 *222 , kk xf mm kk x an d thus * xx , k k which shows that k * converges to at least 5. Numerical Results we iretical ehe gl geted line search methods r some ion, we will studnume- hms with the nerch tively. ion is R-linearly [18]. a ec In the above section s, nvestigated the theopro- prties and analyzed tobal convergenced conver- nce rate of rel an unde y the w line sea mild conditions. In this sect rical performance of algorit approaches. First, we choose some numerical examples to test the Alg ori thms ( NA) , (NG) , and ( NW) an d mak e some com- parisons to the algorith ms with the original line searches. The original line search methods are denoted by OA, OG, and OW, resp The numerical examples are from [12]. We use the same symbols to denote the problems. For example, (P5) denotes Problem (P5) in [12]. For each problem, the li- miting number of functional evaluations is set to 10,000, and the stopping condit 6 10 . k g (42) We choose a portable computer with a Pentium 1.2 MHz CPU and Matlab 6.1 to test our algorithms. The parameters are set to 0.38 , 0.87 , 0.618 , 01L , and 11 2 1 , T kkk k k xx gg Lxx (43) 1. kk forAlgorithm : Step 0. Given paramete k (NA)rs 0.38 , 0.87 , and : = 0; Step 1. If set k || k g6 |10 then stop else takin k g k dg ; S Ftep 2.ind step size k by using the modi- ijo rule; . Set fied Ar mStep 3kk1kk xd and set :1kk ep 1. , go to StFor the Goldstein and the modified Goldstein rules, we use e the following procedurto find the step size. Copyright © 2013 SciRes. AJOR 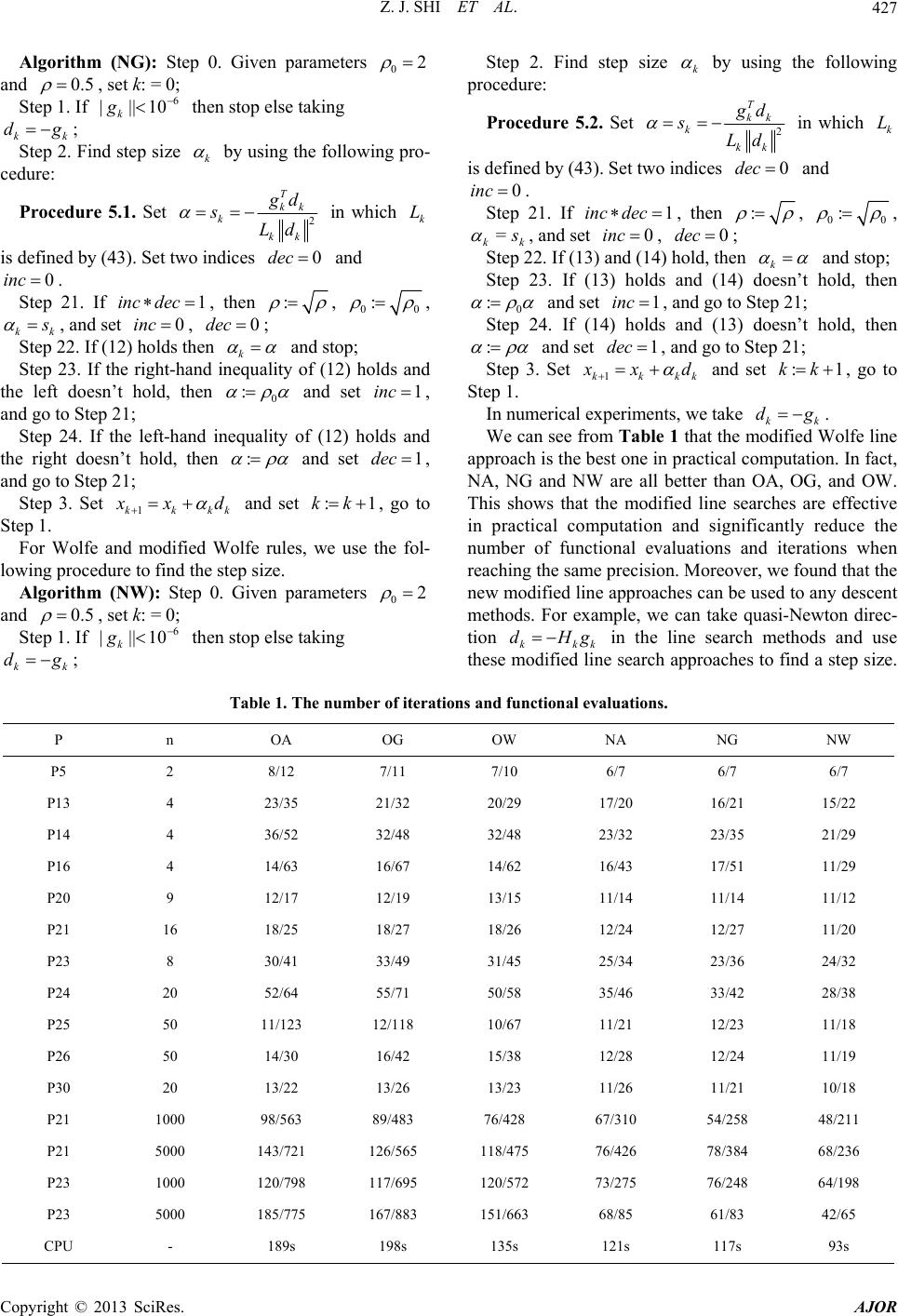 Z. J. SHI ET AL. Copyright © 2013 SciRes. AJOR 427 m (NG): Step 0. Given parameters Algorith 02 and 0.5 , s Step 1et k: = 0; . If then stop else taking 6 |||10 k g kk g ; Step 2. Find step size k d by using the following pro- ce 5.1. Set dure: Procedure 2 kk k T kk dich is Step 21. If , then sLd in wh k L defined by (43). Set two indices 0dec and 0inc . 1inc dec : , 00 : , kk , and set 0inc , 0dec ; Step 22. If (12) holds thenk lit and stop; y of lds and the lefoesn’t hold, then Step 23. If the right-hand inequa(12) ho t d 0 : and set 1inc , an1; Step left-ha inequay of (12) holds and th d go to Step 2 24. If thendlit e right doesn’t hold, then : and set 1dec , and go to Step 21; Step 3. Set 1kkkk xd t :1kk o Step 1. and se go t p size. ): Step 0. Given parameters , For Wolfe and modified Wolfe rules, we use the fol- lowing procedure to find the ste Algorithm (NW 02 and 0.5 , s Step 1et k: = 0; . If then stop else taking ind step sStep 2. Fize k by using the following procedure: 6 |||10 k g kk g ; d Procedure 5.2. Set 2 T kk k kk d in which sLd iso indices k L defined by (43). Set tw and 0dec 0inc . Step 21. If 1inc dec , then : , 0 :0 , ks= , and kset 0inc , 3) and (14) h0dec; Step 22. If (1old, then k 23. If (1s 4) doe sn’t and stop; Step 3) holdand (1 hold, then 0 : and set 1inc , and go to S tep 21; Step 24. If (14) holds and (13) doesn’t hold, then : and set dec , an d go to Step 2 1 ; 1 Step 3. Set 1kkkk xd and set :1kk , go to Step 1. experiments, w n see from Table 1 that the mWolfe line ap mputation. In fact, N In numericale take kk dg We ca. odified proach is the best one in practical co A, NG and NW are all better than OA, OG, and OW. This shows that the modified line searches are effective in practical computation and significantly reduce the number of functional evaluations and iterations when reaching the same precision. Moreover, we found that the new modified line approaches can be used to any descent methods. For example, we can take quasi-Newton direc- tion kkk dHg in the line search methods and use these modified line search approaches to find a step size. s and functional evaluations. Table 1. The numberat n of iterion P OA OG OW NA NG NW P5 2 6/7 6/7 8/12 7/11 7/10 6/7 P13 2 23/35 21/29 1 5 1 1 1 CPU - 189s 198s 135s 121s 117s 93s 4 23/35 21/32 20/29 17/20 16/21 15/22 P14 4 36/52 32/48 32/48 3/32 P16 4 14/63 16/67 14/62 16/43 17/51 11/29 P20 9 12/17 12/19 13/15 11/14 11/14 11/12 P21 16 18/25 18/27 18/26 12/24 12/27 11/20 P23 8 30/41 33/49 31/45 25/34 23/36 24/32 P24 20 52/64 55/71 50/58 35/46 33/42 28/38 P25 50 11/123 12/118 10/67 11/21 12/23 11/18 P26 50 14/30 16/42 15/38 12/28 12/24 11/19 P30 20 13/22 13/26 13/23 11/26 11/21 10/18 P21 00098/563 89/483 76/428 67/310 54/258 48/211 P21 00043/72126/56518/47576/426 78/384 68/236 P23 1000 120/798 117/695 120/572 73/275 76/248 64/198 P23 5000 185/775 167/883 151/663 68/85 61/83 42/65 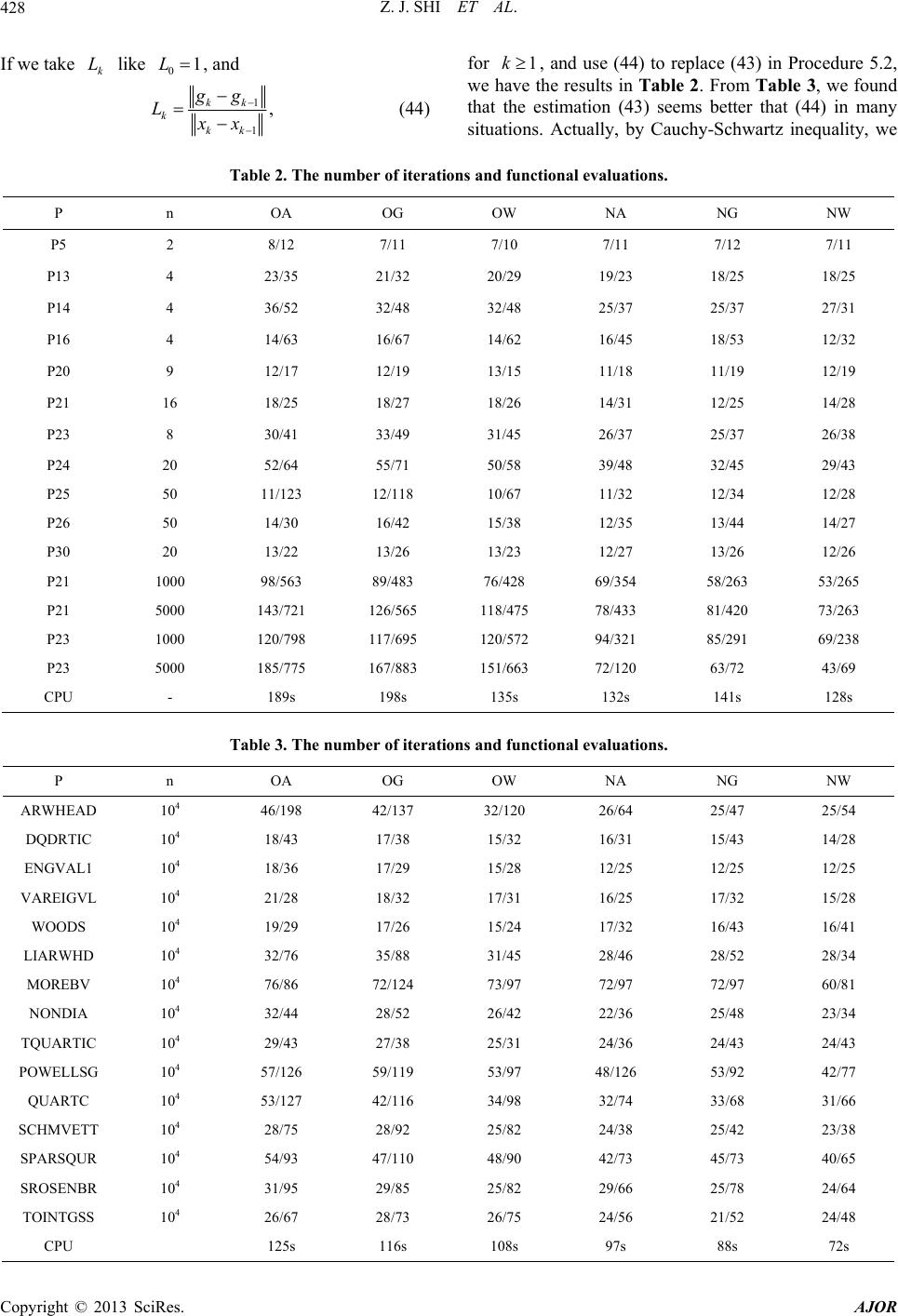 Z. J. SHI ET AL. 428 If we like , and take k L0 L1 1 1 , kk kkk gg xx ) f, and u to repla) in Pro5.2, we he results inTable 2. F Table 3, wound thstimatio) seems that (44) in many sits. Actua Cauchyneq, we 2. The number of iteration P n O L (44 or 1kse (44)ce (43cedure ave th at the e n (43rom better e f uationlly, by-Schwartz iuality Table s and functional evaluations. OW NA NG NW A OG P5 2 8/12 7/11 7/10 7/11 7/12 7/11 P13 4 18/25 18/25 P14 1 5 1 1 1 1 1 1 1 23/35 21/32 20/29 19/23 4 36/52 32/48 32/48 25/37 25/37 27/31 P16 4 14/63 16/67 14/62 16/45 18/53 12/32 P20 9 12/17 12/19 13/15 11/18 11/19 12/19 P21 16 18/25 18/27 18/26 14/31 12/25 14/28 P23 8 30/41 33/49 31/45 26/37 25/37 26/38 P24 20 52/64 55/71 50/58 39/48 32/45 29/43 P25 50 11/123 12/118 10/67 11/32 12/34 12/28 P26 50 14/30 16/42 15/38 12/35 13/44 14/27 P30 20 13/22 13/26 13/23 12/27 13/26 12/26 P21 00098/563 89/483 76/428 69/354 58/263 53/265 P21 00043/72126/56518/47578/433 81/420 73/263 P23 00020/79817/69520/57294/321 85/291 69/238 P23 5000 185/775 167/883 151/663 72/120 63/72 43/69 CPU - 189s 198s 135s 132s 141s 128s Tabe numbations and functional ens. le 3. Ther of itervaluatio P n OA OG OW NA NG NW ARWHEAD 10 46/198 42/137 32/120 26/64 25/47 25/54 4 DQDRTIC 104 15/43 14/28 ENGL1 P 33/68 S CPU 125s 116s 108s 97s 88s 72s 18/43 17/38 15/32 16/31 VA 10418/36 17/29 15/28 12/25 12/25 12/25 VAREIGVL 104 21/28 18/32 17/31 16/25 17/32 15/28 WOODS 104 19/29 17/26 15/24 17/32 16/43 16/41 LIARWHD 104 32/76 35/88 31/45 28/46 28/52 28/34 MOREBV 104 76/86 72/124 73/97 72/97 72/97 60/81 NONDIA 104 32/44 28/52 26/42 22/36 25/48 23/34 TQUARTIC 104 29/43 27/38 25/31 24/36 24/43 24/43 OWELLSG 104 57/126 59/119 53/97 48/126 53/92 42/77 QUARTC 104 53/127 42/116 34/98 32/74 31/66 SCHMVETT 104 28/75 28/92 25/82 24/38 25/42 23/38 SPARSQUR 104 54/93 47/110 48/90 42/73 45/73 40/65 ROSENBR 104 31/95 29/85 25/82 29/66 25/78 24/64 TOINTGSS 104 26/67 28/73 26/75 24/56 21/52 24/48 Copyright © 2013 SciRes. AJOR 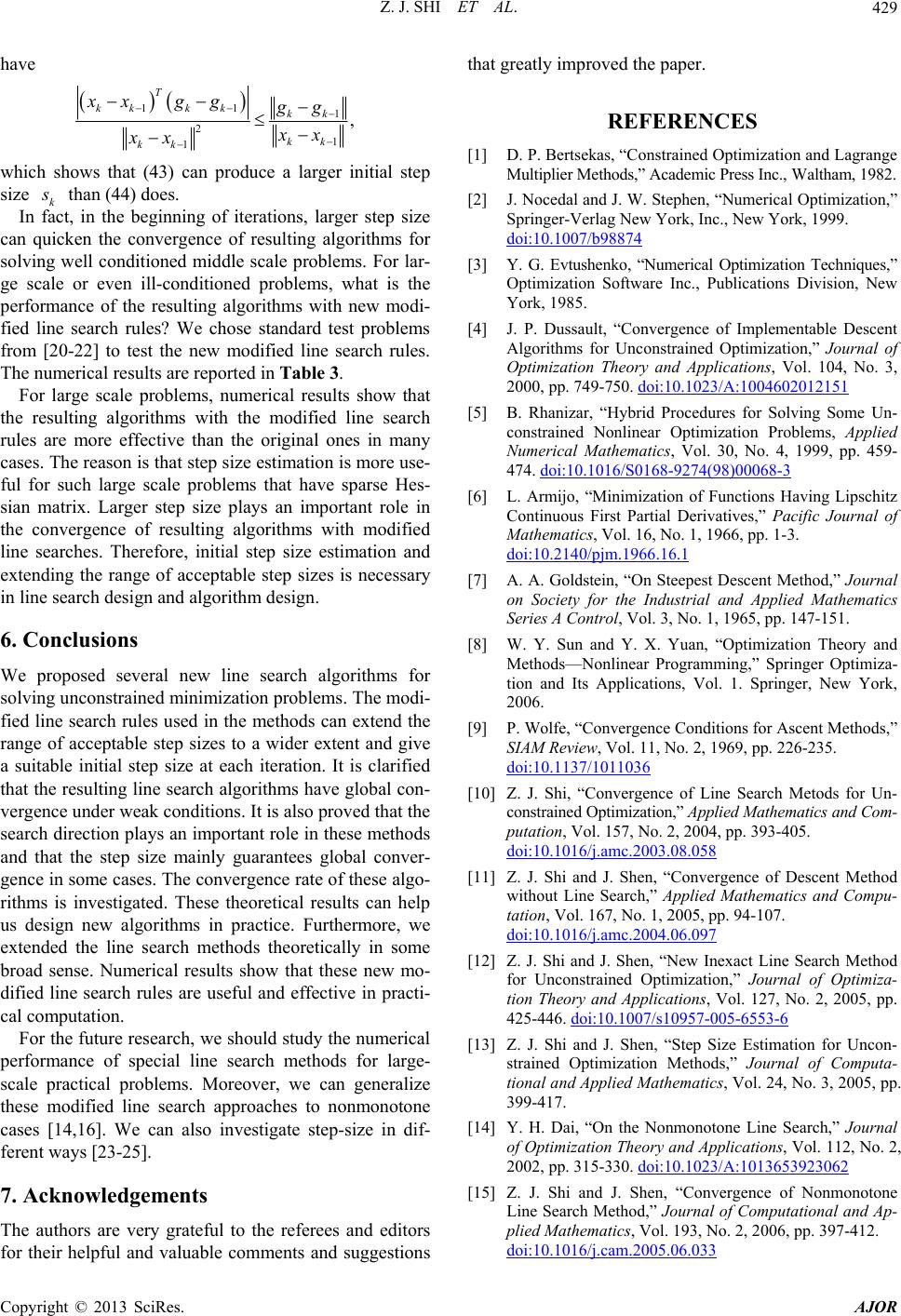 Z. J. SHI ET AL. 429 have 11 1 21 1 , T kkk kkk kk kk xx gg x xx hows that (43) can produce a larger initial step gg x which s size k than (44) does. In, in the beginning of iterations, larger step size can quicken the convergence of resulting algoms for solving well conditioned middle scale problems. For lar- m an extend the to a wider extent and p size at each iteration. It is clarified that greatly improved the paper. ERENCES [1] P. Bertsekaonstrained ization andrange s,” Academic Press Inc., Waltham, 1982. . Stephen, “Numerical Optimization,” , Inc., New York, 1999. factrith ge scale or even ill-conditioned problems, what is the perforance of the resulting algorithms with new modi- fied line search rules? We chose standard test problems from [20-22] to test the new modified line search rules. The numerical results are reported in Table 3. For large scale problems, numerical results show that the resulting algorithms with the modified line search rules are more effective than the original ones in many cases. The reason is that step size estimation is more use- ful for such large scale problems that have sparse Hes- sian matrix. Larger step size plays an important role in the convergence of resulting algorithms with modified line searches. Therefore, initial step size estimation and extending the range of acceptable step sizes is necessary in line search design and algorith m design . 6. Conclusions We proposed several new line search algorithms for solving unconstrained minimization problems. The modi- fied line search rules used in the methods c range of acceptable step sizes a suitable initial stegive that the resulting line search algorith ms have global con- vergence und er weak con d itions . It is also pro ved th at th e search direction plays an important role in these methods and that the step size mainly guarantees global conver- gence in some cases. The convergence rate of these algo- rithms is investigated. These theoretical results can help us design new algorithms in practice. Furthermore, we extended the line search methods theoretically in some broad sense. Numerical results show that these new mo- dified line search rules are useful and effective in practi- cal computation. For the future research, we should study the numerical performance of special line search methods for large- scale practical problems. Moreover, we can generalize these modified line search approaches to nonmonotone cases [14,16]. We can also investigate step-size in dif- ferent ways [23-25]. 7. Acknowledgements The authors are very grateful to the referees and editors for their helpful and valuable comments and suggestions Multiplier Method [2] J. Nocedal and J. W REF D. s, “COptim Lag Springer-Verlag New York doi:10.1007/b98874 [3] Y. G. Evtushenko, “Numerical Optimization Techniques,” Optimization Software Inc., Publications Division, New York, 1985. [4] J. P. Dussault, “Convergence of Implementable Descent Algorithms for Unconstrainedization,” Journal of Optimization , Vol. 104, No. 3, Optim Theory and Applications 2000, pp. 749-750. doi:10.1023/A:1004602012151 [5] B. Rhanizar, “Hybrid Procedures for Solving Some Un- constrained Nonlinear Optimization Problems, Applied Numerical Mathematics, Vol. 30, No. 4, 1999, pp. 459- 474. doi:10.1016/S0168-9274(98)00068-3 [6] L. Armijo, “Minimization of Functions Having Lipschitz Continuous First Partial Derivatives,” Pacific Journal of Mathematics, Vol. 16, No. 1, 1966, pp. 1-3. doi:10.2140/pjm.1966.16.1 [7] A. A. Goldstein, “On Steepest Descent Method,” Journal on Society for the Industrial and Applied Mathematics Series A Control, Vol. 3, No. 1, 1965, pp. 147-151. [8] W. Y. Sun and Y. X. Yuan, “Optimization Theory and Methods—Nonlinear Programming,” Springer Optimiza- tion and Its Applications, Vol. 1. Springer, New York, 2006. [9] P. Wolfe, “Convergence Conditions for Ascent Methods,” SIAM Review, Vol. 11, No. 2, 1969, pp. 226-235. doi:10.1137/1011036 [10] Z. J. Shi, “Convergence of Line Search Metods for Un- constrained Optimization,” Applied Mathematic s and Com- putation, Vol. 157, No. 2, 2004, pp. 393-405. doi:10.1016/j.amc.2003.08.058 [11] Z. J. Shi and J. Shen, “Convergence of Descent Method without Line Search,” Applied Mathematics and Compu- tation, Vol. 167, No. 1, 2005, pp. 94-107. doi:10.1016/j.amc.2004.06.097 [12] Z. J. Shi and J. Shen, “New Inexact Line Search Method for Unconstrained Optimization,” Journal of Optimiza- tion Theory and Applications, Vol. 127, No. 2, 200 425-446. 5, pp. 10957-005-6553-6doi:10.1007/s , 2005, pp. 23062 [13] Z. J. Shi and J. Shen, “Step Size Estimation for Uncon- strained Optimization Methods,” Journal of Computa- tional and Applied Mathematics, Vol. 24, No. 3 399-417. [14] Y. H. Dai, “On the Nonmonotone Line Search,” Journal of Optimization Theory and Applications, Vol. 112, No. 2, 2002, pp. 315-330. doi:10.1023/A:10136539 [15] Z. J. Shi and J. Shen, “Convergence of Nonmonotone Line Search Method,” Journal of Computational and Ap- plied Mathematics, Vol. 193, No. 2, 2006, pp. 397-412. doi:10.1016/j.cam.2005.06.033 Copyright © 2013 SciRes. AJOR  Z. J. SHI ET AL. 430 [16] W. Y. Sun, J. Y. Han and J. Sun, “Global Convergence of Nonmonotone Descent Methods for Unconstrained Opti- mization Problems,” Journal of Computational and Ap- plied Mathematics, Vol. 146, No. 1, 2002, pp. 89-98. doi:10.1016/S0377-0427(02)00420-X [17] H. C. Zhang and W. W. Hager, “A Nonmonotone Line Search Technique and Its Application to Unconstrained Optimization,” The SIAM Journal on Optimization, Vol. 14, No. 4, 2004, pp. 1043-1056. doi:10.1137/S1052623403428208 [18] J. M. Ortega and W. C. Rheinboldt, “Iterative Solution of Nonlinear Equations in Several Variables,” Academic Press, Walth am , 1970. [19] R. T. Rockafellar, “Convex Analysis,” Princeton Univer- sity Press, Princeton, 1970. [20] I. Bongartz, A. R. Conn, N. I. M. Gould and P. L. Toi “CUTE: Constrained and Unconstrai nt ned Testing Envi- , ronments,” ACM Transactions on Mathematical Software, Vol. 21, No. 1, 1995, pp. 123-160. doi:10.1145/200979.201043 [21] W. W. Hager and H. C. Zhang, “A New Conjugate Gra- dient Method with Guaranteed Descent and an Efficient Line Search,” The SIAM Journal on Optimization, Vol. 16, No. 1, 2005, pp. 170-192. doi:10.1137/030601880 [22] W. W. Hager and H. C. Zhang, “ DESCENT, A Conjugate Gradient Method Algorithm 851: CG with Guaran- teed Descent,” ACM Transactions on Mathematical Soft- ware, Vol. 32, No. 1, 2006, pp. 113-137. doi:10.1145/1132973.1132979 [23] A. I. Cohen, “Stepsize Analysis for Descent Methods,” Journal of Optimization Theory and Applications, Vol. 33, No. 2, 1981, pp. 187-205. doi:10.1007/BF00935546 [24] J. C. Gilbert and J. Nocedal, “Global Convergence Pro- perties of Conjugate Gradie nt Methods for The SIAM Journal on OptimizaOptimization,” tion, Vol. 2, No. 1, 1992, pp. 21-42. doi:10.1137/0802003 [25] Z. J. Shi, “A New Memory Gradient Method under Exact Line Search,” Asia-Pacific Journal of Operational Re- search, Vol. 20, No. 2, 2003, pp. 275-284. Copyright © 2013 SciRes. AJOR
|