 American Journal of Computational Mathematics, 2013, 3, 231-241 http://dx.doi.org/10.4236/ajcm.2013.33033 Published Online September 2013 (http://www.scirp.org/journal/ajcm) Wave Equation Simulation Using a Compressed Modeler Victor Pereyra Energy Resources Engineering, Stanford University, Stanford, USA Email: pereyra@stanford.edu Received July 30, 2013; revised August 20, 2013; accepted August 27, 2013 Copyright © 2013 Victor Pereyra. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT Repeated simulations of large scale wave propagation problems are prevalent in many fields. In oil exploration earth imaging problems, the use of full wave simulations is becoming routine and it is only hampered by the extreme compu- tational resources required. In this contribution, we explore the feasibility of employing reduced-order modeling tech- niques in an attempt to significantly decrease the cost of these calculations. We consider the acoustic wave equation in two-dimensions for simplicity, but the extension to three-dimensions and to elastic or even anysotropic problems is clear. We use the proper orthogonal decomposition approach to model order reduction and describe two algorithms: the traditional one using the SVD of the matrix of snapshots and a more economical and flexible one using a progressive QR decomposition. We include also two a posteriori error estimation procedures and extensive testing and validation is presented that indicates the promise of the approach. Keywords: Wave Equation; POD; Model Order Reduction; Earth Imaging 1. Introduction We consider the problem of the repeated simulation of acoustic wave propagation in complex media. This is the basic problem of the seismic method for hydrocarbon exploration and for many other applications. In the past 20 years or so there has been considerable activity in this area and many different approaches have been proposed. A limitation of these methods in the oil exploration in- dustry today, when large scale 3D regions are in question, is the cost of the forward simulations, i.e., the repeated solution of the acoustic or elastic wave equation in a large 3D mesh. This cost is exacerbated if one considers that a routine 3D survey involves thousands of sources and corresponding receivers, producing millions of seis- mograms in terabyte size multi-dimensional arrays. Model Order Reduction (MOR) (compressed mod- eling) refers to a collection of techniques to reduce the number of degrees of freedom of the very large scale dynamical systems that result after space discretization of time-dependent partial differential equations. Some of these techniques have been successfully employed in the simulation of VLSI circuits, computational fluid mechan- ics, real-time control, heat conduction, flow in porous media, and other problems [1-3]. In comparison, not much has been done for wave propagation in the time domain, although it does not seem that there are fundamental dif- ficulties for its application and activity in this area is picking up [4-8]. The method is particularly attractive for linear problems. Even with the use of large scale clusters, techniques that use full fidelity wave solvers are daunting for many imaging and data processing tasks. In [7], we have shown how to obtain very large reductions in the cost of solving the acoustic wave equation many times for related prob- lems by using the method of Proper Orthogonal De- composition (POD), a MOR technique that basically projects a large dimensional space discretized dynamical system into a much smaller one, using orthogonal basis derived from a set of snapshots of one or at most a few full simulations. In this paper we enhance the solvers used in [7] by adding absorbing boundary conditions that are essential to simulate problems of real interest, where sources and receivers are generally on the free surface. We propose to use the full fidelity and reduced order codes in several applications that require the repeated simulation of closely related problems, such as those in which only the position of the source or its frequency changes, or in the case of full wave form inversion, when the material properties are slowly varying in an optimiza- tion loop. The purpose of this contribution is to show the feasibility of using this approach to reduce considerably the demand in computer resources, while still preserving enough accuracy to make them useful in these real life applications. In separate publications we shall apply these C opyright © 2013 SciRes. AJCM  V. PEREYRA 232 techniques to problems in seismic imaging. We show results of an implementation for the two di- mensional acoustic wave equation based on a high order finite difference method. There are two codes associated with it: a full fidelity forward solver (used to generate the snapshots and for error control) and a reduced order solver. There are also two versions of the MOR code: in the first one we use the Singular Value Decomposition of the matrix of snapshots in order to trim those that are unnec- essary and to generate an orthogonal basis. In the second and new version, we consider instead a progressive QR algorithm (within the HF code), which helps select a well conditioned basis of snapshots and that ends automati- cally with an orthogonal basis (the Q part). The second code is faster and produces as good or even a better basis as the first one, so it will be preferred in further devel- opments. As a preliminary step we study the projection error as the model is perturbed from the base one, from which the snapshots are taken. It is shown that if the basis is well chosen, the distance of the High Fidelity (HF) solution to the base subspace is small and grows slowly, i.e., as hoped for, most of the action occurs close to this low dimensional subspace, even for substantial departures from the baseline model. This assesment uses the HF solution and therefore is not practical in estimating the error of actual MOR solutions. For this purpose we develop and test an a posteriori computable approximation error analy- sis. We emphasize that what is generated is an error es- timate, not an error bound. In fact, if this estimate is suf- ficiently good, it can be used to correct the solution and increase its accuracy, as we demonstrate. In [4], the authors derive a priori error bounds for POD. They present several numerical examples showing the sharpness of their estimates. In [9], an a-posteriori error bound is derived for some control problems using POD. The closest treatment to the one presented here is in [10], where the authors study carefully the a posteriori errors for nonlinear dynamical ordinary differential equations including interesting numerical examples. They concen- trate on bounds rather than estimates as we do here. We illustrate the techniques on various examples of increase- ing complexity. The larger 2D examples approach in size those that would be useful in 3D when localization tech- niques are used for solving large problems in parallel. 2. Wave Equation in 2D We consider the acoustic wave equation in 2D in second order form and in inhomogeneous media. We also add absorbing boundary conditions [11], to allow the solution of more realistic problems than in [7]. The equation to be solved numerically is: 22 ,2, tt t wvxzwButxz wxz w ,, (1) where the last two terms account for the absorbing boundary conditions on every side of the computational box (assumed to be 0,max0, maxxz) with the exception of the top (free surface). We define 2 0 ,coshxzU , where 0,U are parameters and is the distance to the boundary in number of mesh points. Obviously, , z decays rapidly away from the artificial boundaries and it has a maximum value of 0. This has the effect of damping spurious reflections caused by the artificial boundaries. As boundary conditions we leave the top free, while at the artificial boundaries we use the absorbing boundary conditions described above. If we discretize in space Equation (1) we obtain: U 2 tt t wAwBut Dw . (2) The matrix of the spatial discretization, accounting for the terms 22 ,vw xzw, is generated in sparse format. We use an 8th order discretization in space and solve the resulting large system of ODE’s by the off-the-shelf integrator Runge, Kutta, Fehlberg RKF45. D is a diagonal matrix that contains the value of at each grid point. The 8th order discretization of the Laplacian requires 17 mesh points. For each coordinate direction we use the weights given in [12] for an eight order approximation to the second derivative. Due to the length of the 8th order stencil, we use a 5-point second order approximation to the Laplacian for points in the three mesh lines adjacent to the boundary. We then solve one or a few of these problems using the HF code in order to produce a number of snapshots, i.e., values of the field variable w at all the spatial mesh points, for selected times. In the abscense of additional information, we will choose these snapshots evenly spaced in the time integration interval. Assuming a linear ordering for the mesh points (z faster than x, say), we form a matrix ,nl where is the number of mesh points and l is the number of snapshots. If is the singular value decomposition (SVD) of this matrix, we threshold the singular values to eliminate the columns of U that are associated with small SVs, and call n T lll UV Unk the resulting matrix, with .kl As we show later, this potentially expensive step can be replaced by a progressive QR algorithm that, as a bonus, provides dynamical adaptivity in the selection of snapshots. In the next step we make the Ansatz for the solution of ** ,,wxt Uat where the time-dependent coefficients k * at are to be determined. By introducing this Ansatz in (2), we Copyright © 2013 SciRes. AJCM 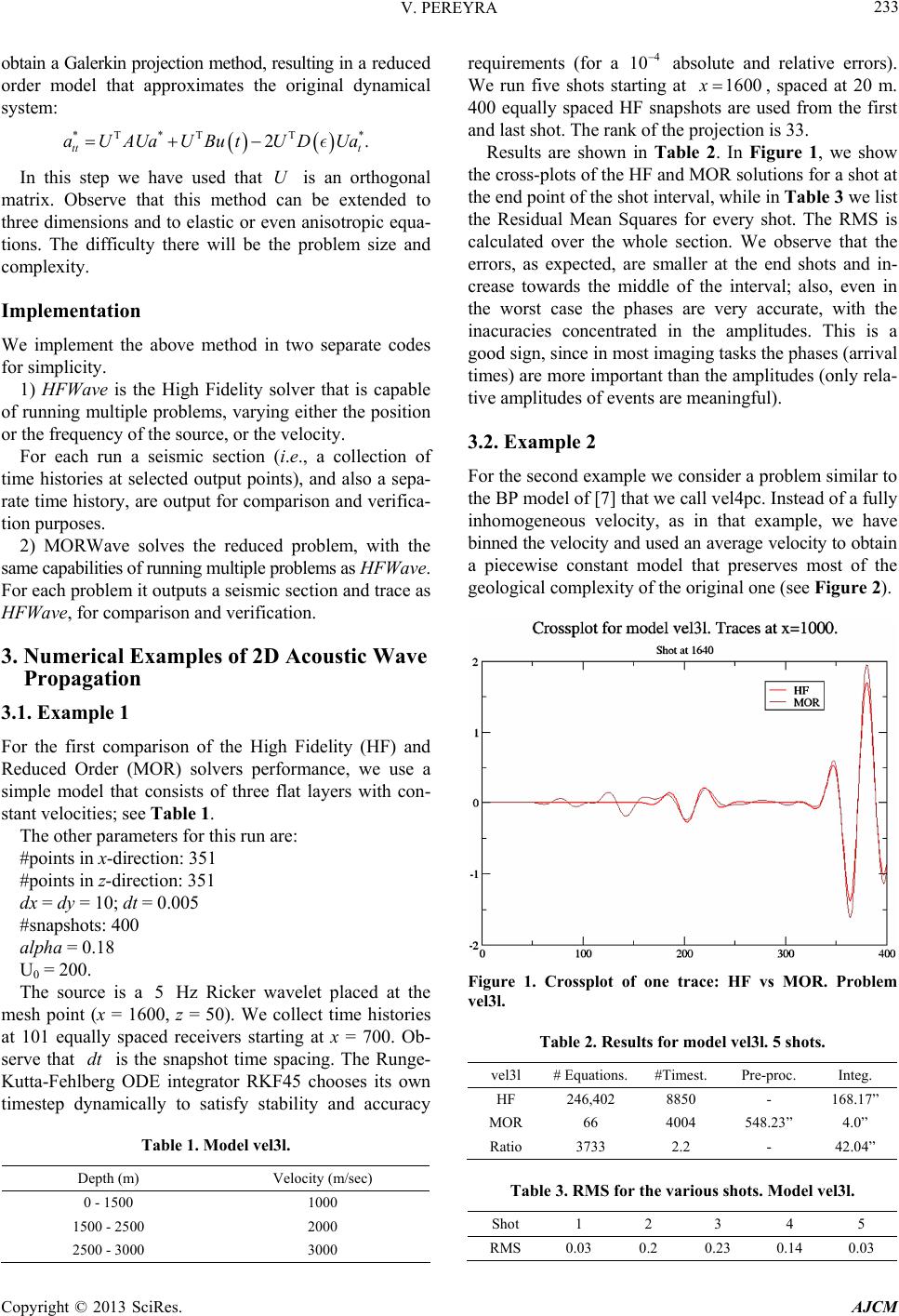 V. PEREYRA 233 obtain a Galerkin projection method, resulting in a reduced order model that approximates the original dynamical system: *T*T T 2. tt t aUAUaU ButU DUa* In this step we have used that U is an orthogonal matrix. Observe that this method can be extended to three dimensions and to elastic or even anisotropic equa- tions. The difficulty there will be the problem size and complexity. Implementation We implement the above method in two separate codes for simplicity. 1) HFWave is the High Fidelity solver that is capable of running multiple problems, varying either the position or the frequency of the source, or the velocity. For each run a seismic section (i.e., a collection of time histories at selected output points), and also a sepa- rate time history, are output for comparison and verifica- tion purposes. 2) MORWave solves the reduced problem, with the same capabilities of running multiple problems as HFWave. For each problem it outputs a seismic section and trace as HFWave, for comparison and verification. 3. Numerical Examples of 2D Acoustic Wave Propagation 3.1. Example 1 For the first comparison of the High Fidelity (HF) and Reduced Order (MOR) solvers performance, we use a simple model that consists of three flat layers with con- stant velocities; see Table 1. The other parameters for this run are: #points in x-direction: 351 #points in z-direction: 351 dx = dy = 10; dt = 0.005 #snapshots: 400 alpha = 0.18 U0 = 200. The source is a Hz Ricker wavelet placed at the mesh point (x = 1600, z = 50). We collect time histories at 101 equally spaced receivers starting at x = 700. Ob- serve that is the snapshot time spacing. The Runge- Kutta-Fehlberg ODE integrator RKF45 chooses its own timestep dynamically to satisfy stability and accuracy 5 dt Table 1. Model vel3l. Depth (m) Velocity (m/sec) 0 - 1500 1000 1500 - 2500 2000 2500 - 3000 3000 requirements (for a 4 10 absolute and relative errors). We run five shots starting at , spaced at 20 m. 400 equally spaced HF snapshots are used from the first and last shot. The rank of the projection is 33. 1600x Results are shown in Table 2. In Figure 1, we show the cross-plots of the HF and MOR solutions for a shot at the end point of the shot interval, while in Table 3 we list the Residual Mean Squares for every shot. The RMS is calculated over the whole section. We observe that the errors, as expected, are smaller at the end shots and in- crease towards the middle of the interval; also, even in the worst case the phases are very accurate, with the inacuracies concentrated in the amplitudes. This is a good sign, since in most imaging tasks the phases (arrival times) are more important than the amplitudes (only rela- tive amplitudes of events are meaningful). 3.2. Example 2 For the second example we consider a problem similar to the BP model of [7] that we call vel4pc. Instead of a fully inhomogeneous velocity, as in that example, we have binned the velocity and used an average velocity to obtain a piecewise constant model that preserves most of the geological complexity of the original one (see Figure 2). Figure 1. Crossplot of one trace: HF vs MOR. Problem vel3l. Table 2. Results for model vel3l. 5 shots. vel3l # Equations.#Timest. Pre-proc. Integ. HF 246,402 8850 - 168.17” MOR 66 4004 548.23” 4.0” Ratio 3733 2.2 - 42.04” Table 3. RMS for the various shots. Model vel3l. Shot 1 2 3 4 5 RMS 0.03 0.2 0.23 0.14 0.03 Copyright © 2013 SciRes. AJCM 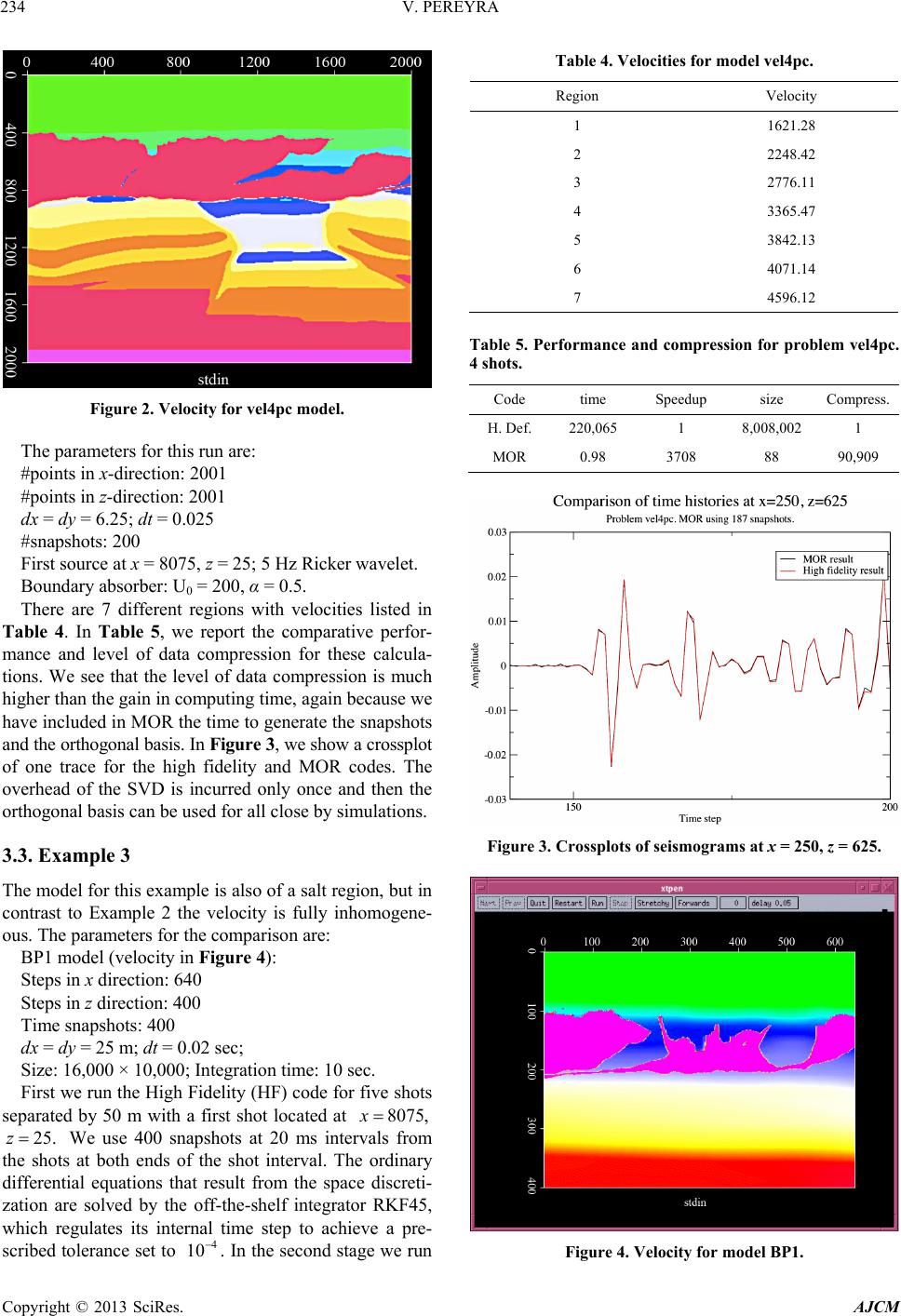 V. PEREYRA 234 Figure 2. Velocity for vel4pc model. The parameters for this run are: #points in x-direction: 2001 #points in z-direction: 2001 dx = dy = 6.25; dt = 0.025 #snapshots: 200 First source at x = 8075, z = 25; 5 Hz Ricker wavelet. Boundary absorber: U0 = 200, α = 0.5. There are 7 different regions with velocities listed in Table 4. In Table 5, we report the comparative perfor- mance and level of data compression for these calcula- tions. We see that the level of data compression is much higher than the gain in computing time, again because we have included in MOR the time to generate the snapshots and the orthogonal basis. In Figure 3, we show a crossplot of one trace for the high fidelity and MOR codes. The overhead of the SVD is incurred only once and then the orthogonal basis can be used for all close by simulations. 3.3. Example 3 The model for this example is also of a salt region, but in contrast to Example 2 the velocity is fully inhomogene- ous. The parameters for the comparison are: BP1 model (velocity in Figure 4): Steps in x direction: 640 Steps in z direction: 400 Time snapshots: 400 dx = dy = 25 m; dt = 0.02 sec; Size: 16,000 × 10,000; Integration time: 10 sec. First we run the High Fidelity (HF) code for five shots separated by 50 m with a first shot located at 8075,x We use 400 snapshots at 20 ms intervals from the shots at both ends of the shot interval. The ordinary differential equations that result from the space discreti- zation are solved by the off-the-shelf integrator RKF45, which regulates its internal time step to achieve a pre- scribed tolerance set to . In the second stage we run 25.z 4 10 Table 4. Velocities for model vel4pc. Region Velocity 1 1621.28 2 2248.42 3 2776.11 4 3365.47 5 3842.13 6 4071.14 7 4596.12 Table 5. Performance and compression for problem vel4pc. 4 shots. Code time Speedup size Compress. H. Def. 220,065 1 8,008,002 1 MOR 0.98 3708 88 90,909 Figure 3. Crossplots of seismograms at x = 250, z = 625. Figure 4. Velocity for model BP1. Copyright © 2013 SciRes. AJCM 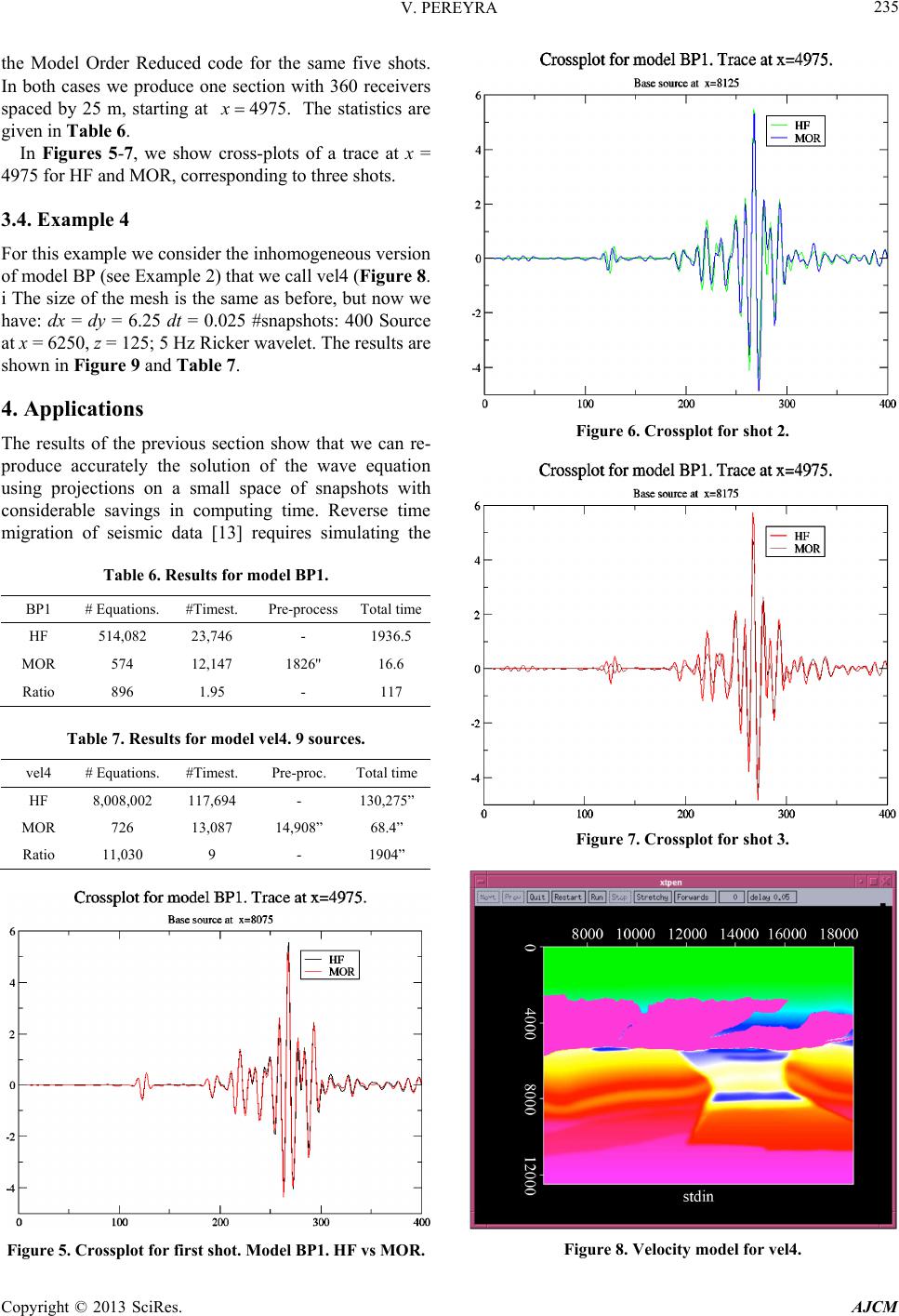 V. PEREYRA 235 the Model Order Reduced code for the same five shots. In both cases we produce one section with 360 receivers spaced by 25 m, starting at 4975.x The statistics are given in Table 6. In Figures 5-7, we show cross-plots of a trace at x = 4975 for HF and MOR, corresponding to three shots. 3.4. Example 4 For this example we consider the inhomogeneous version of model BP (see Example 2) that we call vel4 (Figure 8. i The size of the mesh is the same as before, but now we have: dx = dy = 6.25 dt = 0.025 #snapshots: 400 Source at x = 6250, z = 125; 5 Hz Ricker wavelet. The results are shown in Figure 9 and Table 7. 4. Applications The results of the previous section show that we can re- produce accurately the solution of the wave equation using projections on a small space of snapshots with considerable savings in computing time. Reverse time migration of seismic data [13] requires simulating the Table 6. Results for model BP1. BP1 # Equations. #Timest. Pre-process Total time HF 514,082 23,746 - 1936.5 MOR 574 12,147 1826'' 16.6 Ratio 896 1.95 - 117 Table 7. Results for model vel4. 9 sources. vel4 # Equations. #Timest. Pre-proc. Total time HF 8,008,002 117,694 - 130,275” MOR 726 13,087 14,908” 68.4” Ratio 11,030 9 - 1904” Figure 5. Crossplot for first shot. Model BP1. HF vs MOR. Figure 6. Crossplot for shot 2. Figure 7. Crossplot for shot 3. Figure 8. Velocity model for vel4. Copyright © 2013 SciRes. AJCM 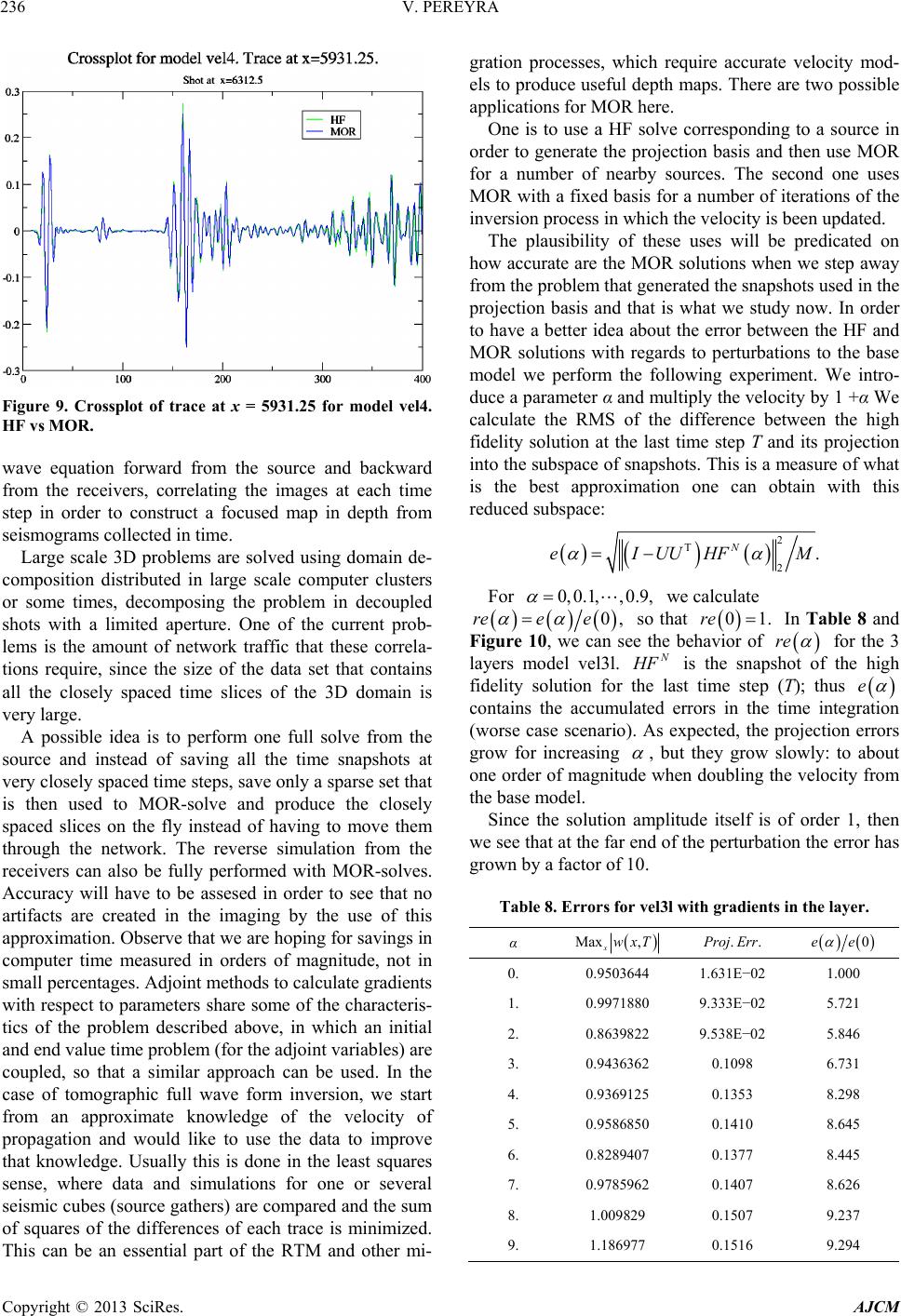 V. PEREYRA 236 Figure 9. Crossplot of trace at x = 5931.25 for model vel4. HF vs MOR. wave equation forward from the source and backward from the receivers, correlating the images at each time step in order to construct a focused map in depth from seismograms collected in time. Large scale 3D problems are solved using domain de- composition distributed in large scale computer clusters or some times, decomposing the problem in decoupled shots with a limited aperture. One of the current prob- lems is the amount of network traffic that these correla- tions require, since the size of the data set that contains all the closely spaced time slices of the 3D domain is very large. A possible idea is to perform one full solve from the source and instead of saving all the time snapshots at very closely spaced time steps, save only a sparse set that is then used to MOR-solve and produce the closely spaced slices on the fly instead of having to move them through the network. The reverse simulation from the receivers can also be fully performed with MOR-solves. Accuracy will have to be assesed in order to see that no artifacts are created in the imaging by the use of this approximation. Observe that we are hoping for savings in computer time measured in orders of magnitude, not in small percentages. Adjoint methods to calculate gradients with respect to parameters share some of the characteris- tics of the problem described above, in which an initial and end value time problem (for the adjoint variables) are coupled, so that a similar approach can be used. In the case of tomographic full wave form inversion, we start from an approximate knowledge of the velocity of propagation and would like to use the data to improve that knowledge. Usually this is done in the least squares sense, where data and simulations for one or several seismic cubes (source gathers) are compared and the sum of squares of the differences of each trace is minimized. This can be an essential part of the RTM and other mi- gration processes, which require accurate velocity mod- els to produce useful depth maps. There are two possible applications for MOR here. One is to use a HF solve corresponding to a source in order to generate the projection basis and then use MOR for a number of nearby sources. The second one uses MOR with a fixed basis for a number of iterations of the inversion process in which the velocity is been updated. The plausibility of these uses will be predicated on how accurate are the MOR solutions when we step away from the problem that generated the snapshots used in the projection basis and that is what we study now. In order to have a better idea about the error between the HF and MOR solutions with regards to perturbations to the base model we perform the following experiment. We intro- duce a parameter α and multiply the velocity by 1 +α We calculate the RMS of the difference between the high fidelity solution at the last time step T and its projection into the subspace of snapshots. This is a measure of what is the best approximation one can obtain with this reduced subspace: 2 T 2. N eIUUHF M For 0, 0.1,, 0.9, we calculate 0,ree e so that In Table 8 and Figure 10, we can see the behavior of 01re . re for the 3 layers model vel3l. N F is the snapshot of the high fidelity solution for the last time step (T); thus e contains the accumulated errors in the time integration (worse case scenario). As expected, the projection errors grow for increasing , but they grow slowly: to about one order of magnitude when doubling the velocity from the base model. Since the solution amplitude itself is of order 1, then we see that at the far end of the perturbation the error has grown by a factor of 10. Table 8. Errors for vel3l with gradients in the layer. α Max , xwxT ..Proj Err 0ee 0. 0.9503644 1.631E−02 1.000 1. 0.9971880 9.333E−02 5.721 2. 0.8639822 9.538E−02 5.846 3. 0.9436362 0.1098 6.731 4. 0.9369125 0.1353 8.298 5. 0.9586850 0.1410 8.645 6. 0.8289407 0.1377 8.445 7. 0.9785962 0.1407 8.626 8. 1.009829 0.1507 9.237 9. 1.186977 0.1516 9.294 Copyright © 2013 SciRes. AJCM 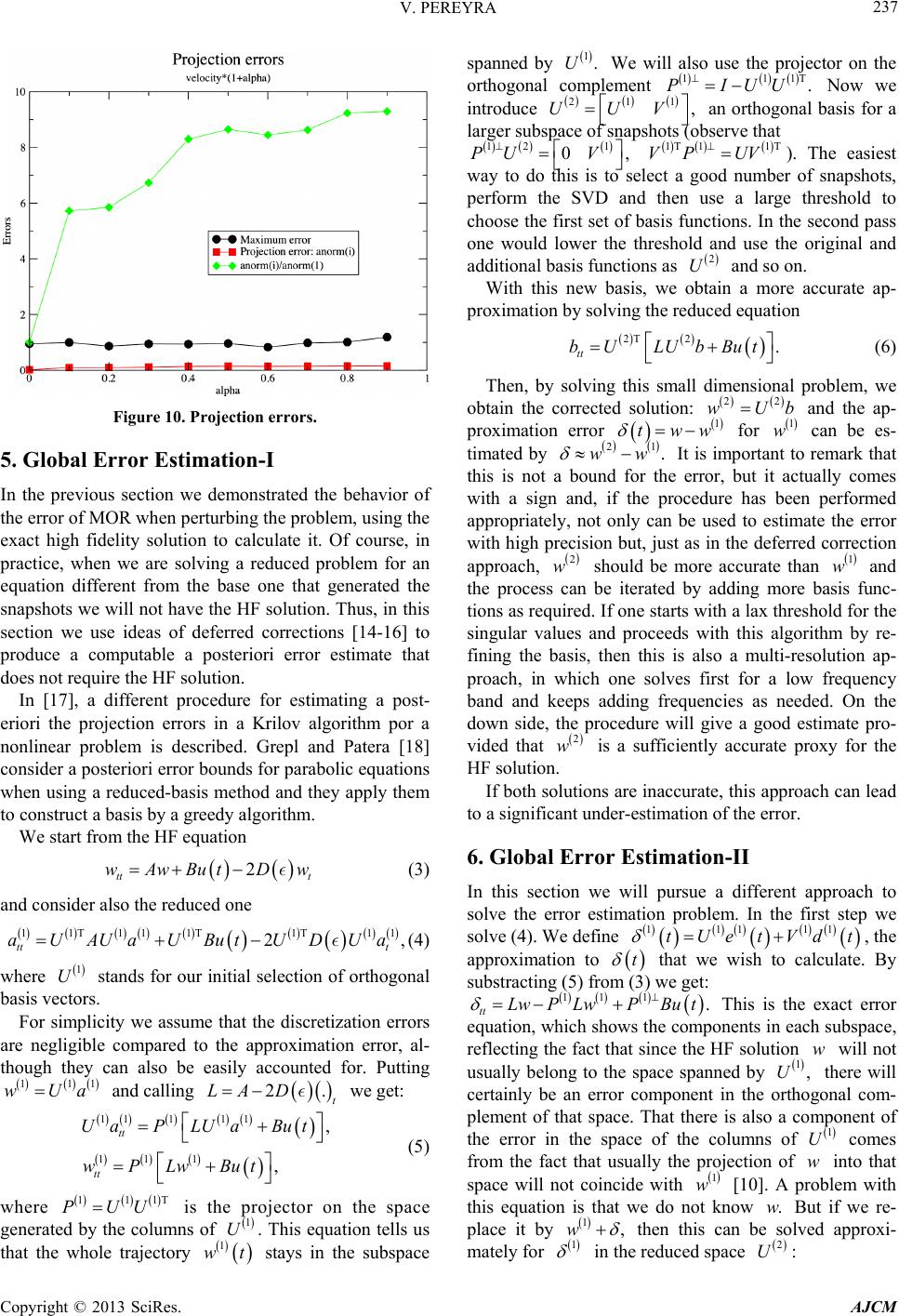 V. PEREYRA 237 Figure 10. Projection errors. 5. Global Error Estimation-I In the previous section we demonstrated the behavior of the error of MOR when perturbing the problem, using the exact high fidelity solution to calculate it. Of course, in practice, when we are solving a reduced problem for an equation different from the base one that generated the snapshots we will not have the HF solution. Thus, in this section we use ideas of deferred corrections [14-16] to produce a computable a posteriori error estimate that does not require the HF solution. In [17], a different procedure for estimating a post- eriori the projection errors in a Krilov algorithm por a nonlinear problem is described. Grepl and Patera [18] consider a posteriori error bounds for parabolic equations when using a reduced-basis method and they apply them to construct a basis by a greedy algorithm. We start from the HF equation 2 tt t wAwBut Dw (3) and consider also the reduced one 11T111T1T11 2 tt t aUAUaUButUDUa, 1. T 1T (4) where stands for our initial selection of orthogonal basis vectors. 1 U For simplicity we assume that the discretization errors are negligible compared to the approximation error, al- though they can also be easily accounted for. Putting and calling we get: 11 wUa 2t LA D 11 111 11 1 , , tt tt UaP LUaBut wPLwBut (5) where is the projector on the space generated by the columns of . This equation tells us that the whole trajectory stays in the subspace 111 PUU 1 U 1 wt spanned by We will also use the projector on the orthogonal complement Now we introduce 1.U UU 11 .PIUU 1 ,V 21 an orthogonal basis for a larger subspace of snapshots (observe that 12 PU 1 0,V ). The easiest way to do this is to select a good number of snapshots, perform the SVD and then use a large threshold to choose the first set of basis functions. In the second pass one would lower the threshold and use the original and additional basis functions as and so on. 1T 11T VP UV 2 U With this new basis, we obtain a more accurate ap- proximation by solving the reduced equation 2T 2. tt bU LUbBut (6) Then, by solving this small dimensional problem, we obtain the corrected solution: and the ap- proximation error for can be es- timated by It is important to remark that this is not a bound for the error, but it actually comes with a sign and, if the procedure has been performed appropriately, not only can be used to estimate the error with high precision but, just as in the deferred correction approach, should be more accurate than and the process can be iterated by adding more basis func- tions as required. If one starts with a lax threshold for the singular values and proceeds with this algorithm by re- fining the basis, then this is also a multi-resolution ap- proach, in which one solves first for a low frequency band and keeps adding frequencies as needed. On the down side, the procedure will give a good estimate pro- vided that is a sufficiently accurate proxy for the HF solution. 22 wU 1 w 1 w b tw 21 .ww 2 w 2 w 1 w If both solutions are inaccurate, this approach can lead to a significant under-estimation of the error. 6. Global Error Estimation-II In this section we will pursue a different approach to solve the error estimation problem. In the first step we solve (4). We define , the approximation to 11111 tUetVdt t 1.PBu t w 1,U 1 U w 1 w .w , that we wish to calculate. By substracting (5) from (3) we get: tt This is the exact error equation, which shows the components in each subspace, reflecting the fact that since the HF solution will not usually belong to the space spanned by there will certainly be an error component in the orthogonal com- plement of that space. That there is also a component of the error in the space of the columns of comes from the fact that usually the projection of into that space will not coincide with [10]. A problem with this equation is that we do not know But if we re- place it by 11 LwP Lw 1 w then this can be solved approxi- mately for 1 in the reduced space 2:U Copyright © 2013 SciRes. AJCM 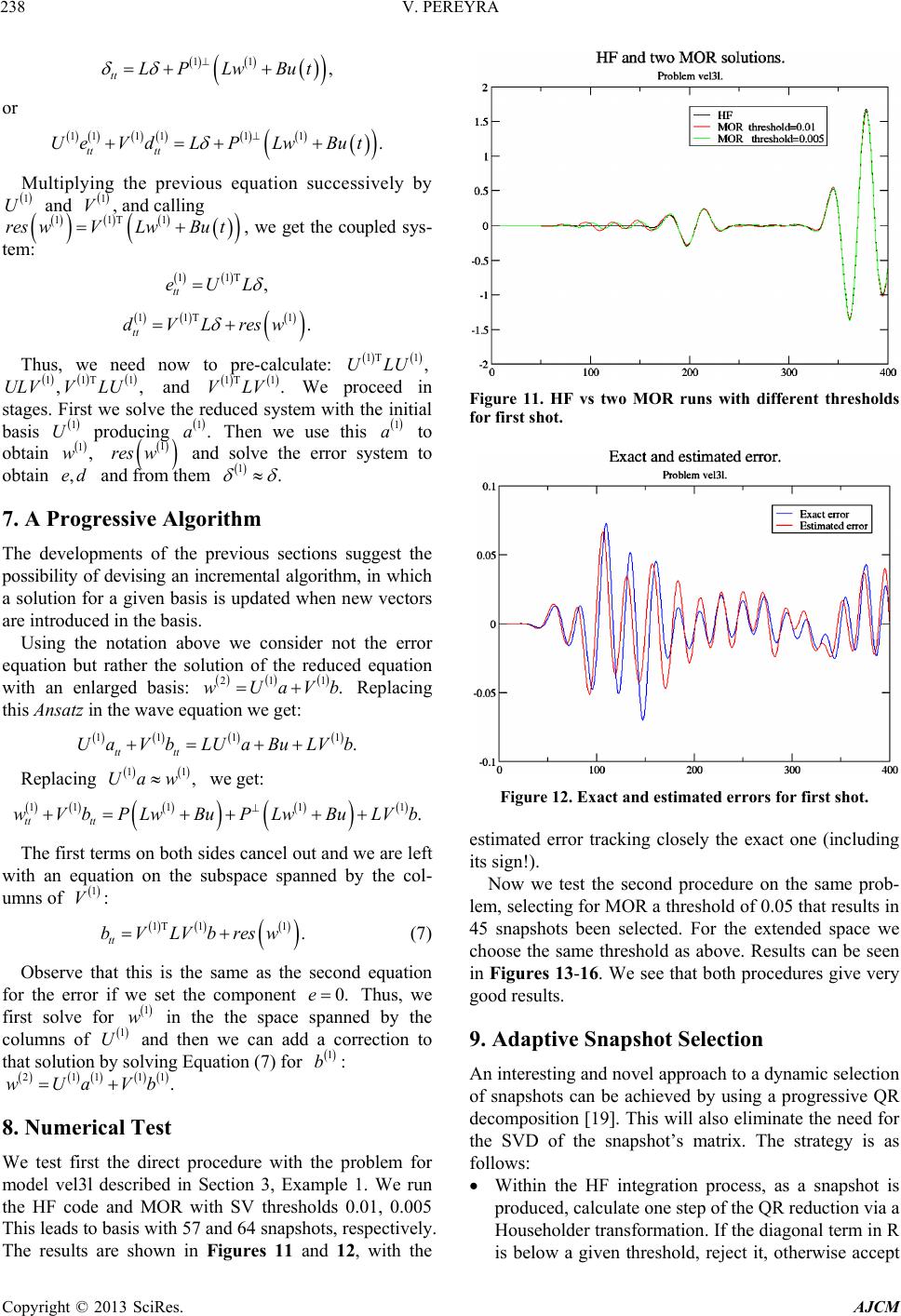 V. PEREYRA 238 11 , tt LPLw But or 111 111. tt tt UeVdL PLwBut Multiplying the previous equation successively by , a , we get the coupled sys- tem: 1 U res and nd calling 1 V 11 V T1 wLwBu t 11T , tt eUL 11T 1 . tt dVLresw Thus, we need now to pre-calculate: and We proceed in stages. First we solve the reduced system with the initial basis produ Then we use this to obtain and solve the error system to obtain and from them 1T1,ULU 1 a 11T 1 ,,ULV V LU 1 Ucin 1,wres w ,ed 1T 1.VLV 1. 1. g a 1 7. A Progressive Algorithm The developments of the previous sections suggest the possibility of devising an incremental algorithm, in which a solution for a given basis is updated when new vectors are introduced in the basis. Using the notation above we consider not the error equation but rather the solution of the reduced equation with an enlarged basis: Replacing this Ansatz in the wave equation we get: 21 1 .wUaVb 11 1. tttt UaVbLUaBu LVb 1 1 1 Replacing we get: 1,Ua w 11 111 . tt tt wVbPLw BuPLw BuLVb The first terms on both sides cancel out and we are left with an equation on the subspace spanned by the col- umns of : 1 V 1T11 . tt bVLVbresw (7) Observe that this is the same as the second equation for the error if we set the component Thus, we first solve for in the the space spanned by the columns of U and then we can add a correction to that solution by solving Equation (7) for 0.e 1:b 1 w 1 1 V 21 .wU b 1 a 8. Numerical Test We test first the direct procedure with the problem for model vel3l described in Section 3, Example 1. We run the HF code and MOR with SV thresholds 0.01, 0.005 This leads to basis with 57 and 64 snapshots, respectively. The results are shown in Figures 11 and 12, with the Figure 11. HF vs two MOR runs with different thresholds for first shot. Figure 12. Exact and estimated errors for first shot. estimated error tracking closely the exact one (including its sign!). Now we test the second procedure on the same prob- lem, selecting for MOR a threshold of 0.05 that results in 45 snapshots been selected. For the extended space we choose the same threshold as above. Results can be seen in Figures 13-16. We see that both procedures give very good results. 9. Adaptive Snapshot Selection An interesting and novel approach to a dynamic selection of snapshots can be achieved by using a progressive QR decomposition [19]. This will also eliminate the need for the SVD of the snapshot’s matrix. The strategy is as follows: Within the HF integration process, as a snapshot is produced, calculate one step of the QR reduction via a Householder transformation. If the diagonal term in R is below a given threshold, reject it, otherwise accept Copyright © 2013 SciRes. AJCM 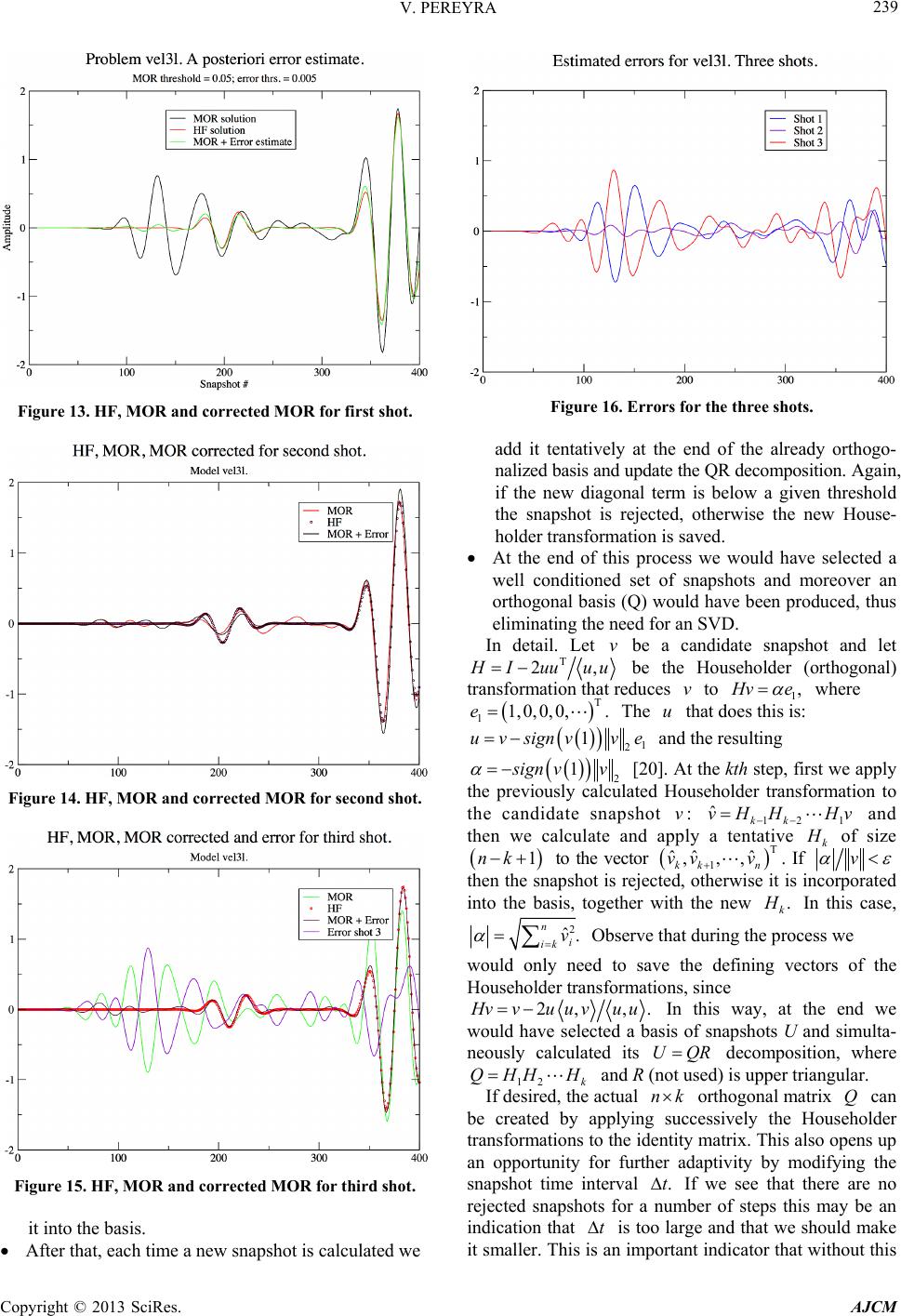 V. PEREYRA 239 Figure 13. HF, MOR and corrected MOR for first shot. Figure 14. HF, MOR and corrected MOR for second shot. Figure 15. HF, MOR and corrected MOR for third shot. it into the basis. After that, each time a new snapshot is calculated we Figure 16. Errors for the three shots. add it tentatively at the end of the already orthogo- nalized basis and update the QR decomposition. Again, if the new diagonal term is below a given threshold the snapshot is rejected, otherwise the new House- holder transformation is saved. At the end of this process we would have selected a well conditioned set of snapshots and moreover an orthogonal basis (Q) would have been produced, thus eliminating the need for an SVD. In detail. Let be a candidate snapshot and let T 2 ,Iuu uu be the Householder (orthogonal) transformation that reduces to 1 v, ve where The u that does this is: T 11,0,0,0, .e 1 2 1uvsignv ve and the resulting 2 1 ign vv [20]. At the kth step, first we apply the previously calculated Householder transformation to the candidate snapshot : 12 1 and then we calculate and apply a tentative ˆkk vHH Hv k of size 1nk to the vector kkn . If T 1ˆ ,,,v ˆˆ vv v then the snapshot is rejected, otherwise it is incorporated into the basis, together with the new . k In this case, 2 ˆ. n i ik v Observe that during the process we would only need to save the defining vectors of the Householder transformations, since 2, ,. vvuuv uu In this way, at the end we would have selected a basis of snapshots U and simulta- neously calculated its UQR decomposition, where 12 k QHHH and R (not used) is upper triangular. If desired, the actual nk orthogonal matrix can be created by applying successively the Householder transformations to the identity matrix. This also opens up an opportunity for further adaptivity by modifying the snapshot time interval Q .t If we see that there are no rejected snapshots for a number of steps this may be an indication that t is too large and that we should make it smaller. This is an important indicator that without this Copyright © 2013 SciRes. AJCM  V. PEREYRA 240 vital information could only be detected before by ex- perimentation. Systematic skipping more than one snap- shot indicates that the step is too small and that can be enlarged, making the process more economical. These step modifications should be done with caution to avoid too many fluctuations, although they do not change much the integration aspects that are actually controlled by RKF45. Output points do not really increase or alter the flow of the integration. The only loose end is how to choose appropriately. Observe that is the norm of the component of orthogonal to the current basis, or in other words 2sin ,v where is the an- gle that forms with the current basis. The larger v is the more independent will be from the existing basis. For instance, choosing implies that no v 0.174 that forms an angle 10 with the existing basis subspace would be accepted. 10. Numerical Examples for Progressive QR We test the new strategy from the previous section on model vel3l. This time we consider 22 shots separated by 10 m and collect snapshots from the two ends and center shots. The statistics are shown in Tables 9 and 10. The line MOR + HF accounts for the pro-rated cost of three HF solves (320/22). The ratio between HF and this more realistic cost is 3.1495. MOR uses 175 basis functions selected and orthogonalized in HF. The accuracy at the center of the two intervals (shots 5 and 15) is good. The threshold used for the angle be- tween a new snapshot and the existing basis was Now we consider the larger model BP1 with 21 shots separated by 10ms and using three of those to extract snapshots (1, 11, 21). MOR used 120 basis functions in this calculation. Again, the accuracy in the middle shots is good. The compression factor is 5.6. 2.87 .87sin20.05 . 11. Conclusion We have shown that a POD reduced-order modeling can be successfully employed to reduce the cost of repeated solutions of the acoustic wave equation in two-dimen- Table 9. Errors for vel3l with gradients in the layer Method Preproc. Integration Total HF 9 1242 1251 MOR 198 19.8 217.8 MOR + HF (3 shots) 377.4 19.8 397.2 Table 10. Model BP1. 21 shots. Method Preproc. Integration Total HF 300 23,262 23,562 MOR 504 33.6 538 MOR + HF (3 shots) 4170 33.6 4201 sions, while still preserving enough accuracy. This has been exemplified using some complex earth models from oil exploration, an important area of application. A pos- teriori error estimation was discussed and two procedures were described and exemplified. The POD procedure was implemented via the traditional SVD approach and through a more economical and flexible progressive QR algorithm, which also lead to an adaptive selection of snapshots and a well-conditioned basis. For additional comparisons, including a realistic full seismic survey see [21]. REFERENCES [1] D. J. Lucia, P. S. Beran and W. A. Silva, “Reduced-Order Modeling: New Approaches for Computational Physics,” Progress in Aerospace Sciences, Vol. 40, No. 1-2, 2001, pp. 51-117. doi:10.1016/j.paerosci.2003.12.001 [2] T. J. Klemas, “Full-Wave Algorithms for Model Order Reduction and Electromagnetic Analysis of Impedance and Scattering,” PhD Thesis, MIT, Electrical Engineering, 2005. [3] F. Troltzsch, S. Volkwein, L. X. Wang and R. V. N. Mel- nik, “Model Reduction Applied to Square Rectangular Martensitic Transformations Using Proper Orthogonal Decomposition,” Applied Numerical Mathematics, Vol. 57, No. 5-7, 2007, pp. 510-520. doi:10.1016/j.apnum.2006.07.004 [4] D. Chapelle, A. Gariah and J. Sainte-Marie, “Galerkin Approximation with Proper Orthogonal Decomposition: New Error Estimates and Illustrative Examples,” ESAIM: Mathematical Modeling and Numerical Analysis, Vol. 46, Cambridge University Press, 2012, pp. 731-757. [5] S. Herkt, M. Hinze and R. Pinnau, “Convergence Analy- sis of Galerkin POD for Linear Second Order Evolution Equations,” Manuscript, 2011. [6] K. Grau, “Applications of the Proper Orthogonal Decom- position Method,” WN/CFD/07/97, 1997. [7] V. Pereyra and B. Kaelin, “Fast Wave Propagation by Model Order Reduction,” ETNA, Vol. 30, 2008, pp. 406- 419. [8] S. Weiland, “Course Model Reduction,” Department of Electrical Engineering, Eindhoven University of Tech- nology, 2005. [9] F. Troltzsch and S. Volkwein, “POD A-Posteriori Error Estimates for Linear-Quadratic Optimal Control Prob- lems,” Computational Optimization and Applications, Vol. 44, No. 1, 2009, pp. 83-115. doi:10.1007/s10589-008-9224-3 [10] M. Rathinam and L. R. Petzold, “A New Look at Proper Orthogonal Decomposition,” SIAM Journal on Numerical Analysis, Vol. 41, No. 5, 2003, pp. 1893-1925. doi:10.1137/S0036142901389049 [11] R. Kosloff and D. Kosloff, “Absorbing Boundaries for Wave Propagation Problems,” Journal of Computational Physics, Vol. 63, No. 2, 1986, pp. 363-376. doi:10.1016/0021-9991(86)90199-3 Copyright © 2013 SciRes. AJCM  V. PEREYRA Copyright © 2013 SciRes. AJCM 241 [12] H. B. Keller and V. Pereyra, “Symbolic Generation of Finite Difference Formulas,” Mathematics of Computa- tion, Vol. 32, 1978, pp. 955-971. doi:10.1090/S0025-5718-1978-0494848-1 [13] B. Biondi and G. J. Shan, “Prestack Imaging of Over- turned Reflections by Reverse Time Migration,” SEG Annual Meeting, 2002. [14] V. Pereyra, “Iterated Deferred Corrections for Nonlinear Operator Equations,” Numerische Mathematik, Vol. 10, No. 4, 1967, pp. 316-323. doi:10.1007/BF02162030 [15] V. Pereyra, J. W. Daniel and L. L. Schumaker, “Iterated Deferred Corrections for Initial Value Problems,” Acta Científica Venezolana, Vol. 19, 1968, pp. 128-135. [16] P. E. Zadunaisky, “A Method for the Estimation of Errors Propagated in the Numerical Solution of a System of Or- dinary Differential Equations,” In: G. I. Kontopoulos, Ed., The Theory of Orbits in the Solar System and in Stellar Systems. Proceedings from Symposium No. 25 Held in Thessaloniki, International Astronomical Union, Acade- mic Press, London, 1964, p. 281. [17] M. Rewienski and J. White, “A Trajectory Piecewise- Linear Approach to Model Order Reduction and Fast Simulation of Nonlinear Circuits and Micromachined Devices,” IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, Vol. 22, No. 2, 2003, pp. 155-170. doi:10.1109/TCAD.2002.806601 [18] M. A. Grepl and A. T. Patera, “A Posteriori Error Bounds for Reduced-Basis Approximations of Parametrized Para- bolic Partial Differential Equations,” ESAIM: Mathe- matical Modelling and Numerical Analysis, Vol. 39, No. 1, 2005, pp. 157-181. doi:10.1051/m2an:2005006 [19] G. H. Golub and C. F. Van Loan, “Matrix Computations,” 3rd Edition, Johns Hopkins University Press, Baltimore, 1996. [20] P. C. Hansen, V. Pereyra and G. Scherer, “Least Squares Data Fitting with Applications,” Johns Hopkins Univer- sity Press, Baltimore, 2012. [21] C. L. Wu, D. Bevc and V. Pereyra, “Model Order Reduc- tion for Efficient Seismic Modeling,” Accepted for Pub- lication in SEG 83rd Annual Meeting Extended Abstracts, Houston, 2013.
|