 American Journal of Computational Mathematics, 2013, 3, 195-204 http://dx.doi.org/10.4236/ajcm.2013.33028 Published Online September 2013 (http://www.scirp.org/journal/ajcm) Jovian Problem: Performance of Some High-Order Numerical Integrators Shafiq Ur Rehman1,2 1Department of Mathematics, The University of Auckland, Auckland, New Zealand, 2Department of Mathematics, University of Engineering and Technology, Lahore, Pakistan Email: s.rehman@math.auckland.ac.nz, srehman@uet.edu.pk Received July 3, 2013; revised August 1, 2013; accepted August 9, 2013 Copyright © 2013 Shafiq Ur Rehman. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT N-body simulations of the Sun, the planets, and small celestial bodies are frequently used to model the evolution of the Solar System. Large numbers of numerical integrators for performing such simulations have been developed and used; see, for example, [1,2]. The primary objective of this paper is to analyse and compare the efficiency and the error growth for different numerical integrators. Throughout the paper, the error growth is examined in terms of the global errors in the positions and velocities, and the relative errors in the energy and angular momentum of the system. We performed numerical experiments for the different integrators applied to the Jovian problem over a long interval of du- ration, as long as one million years, with the local error tolerance ranging from 10−16 to 10−8. Keywords: N-Body Simulations; Jovian Problem; Numerical Integrators; CPU-Time 1. Introduction Computational astronomers make extensive use of accu- rate N-body simulations when studying the dynamics of the planets, asteroids and other small celestial bodies in the Solar System. These simulations are performed by first deriving a set of differential equations for the accel- eration of the N bodies in the simulation, and specifying the initial positions and velocities of the bodies at time t = t0. Generally, the initial value problems (IVPs) that occur for N-body simulations are a mixture of first- and second-order differential equations, but the sort of prob- lems we are considering are of the form, 000 , ,=,=,ytftytyt yyt y 0 k (1.1) where 0 and 0 denote the initial posi- tions and velocities, the operator denotes differentiation with respect to time t, and is a suffi- ciently smooth function. Here, is the dimension of the IVP, which in some cases may change over time, as bodies are added or removed in the simulations. In some cases, these equations can be solved analytically, but mostly the differential equations are too complicated to find analytical solutions, necessitating the use of ap- proximation techniques to find the numerical approxi- mate solution. A wide range of integrators, for example, Runge-Kutta [3,4], Linear multistep [5], Runge-Kutta- k yk y :fk k Nyström [6], and Störmer [7] are used to find a numeri- cal solution to the differential equations at 0 =tt ih , with and time-step h, which can depend on i. =1,2,i 2. Jovian Problem The Jovian problem (see, for example, [1]) models the orbital motion of the Sun and the four Gas giants, Jupiter, Saturn, Uranus and Neptune, interacting through Newto- nian gravitational forces. The Jovian problem is often used in numerical experiments, because the Gas giants collectively drive much of the dynamics of the Solar System. Let , be the position vector of the body of the Jovian problem, where the bodies are ordered from Sun to Neptune and the coordi- nate system is the three-dimensional Cartesian system with the origin at the barycentre (centre of mass) of the bodies. Then the equations of motion for the body can be written as =,, ,=1,,5 T iiii rxyzi th i th i 5 3 =1, 2 , =1,,5, jj i i jji ji rt rt rt i rt rt (1.2) where 2 denotes the L2-norm and is the gravita- tional constant G times the mass m of the body, i.e, th j = j Gm . For each body we have a second-order differential equation for the x-, y-, and z-component, C opyright © 2013 SciRes. AJCM  S. U. REHMAN 196 giving us fifteen second-order differential equations in total. We express units of distance in astronomical units, the independent variable in Earth days and the mass in Solar mass. j We use the symmetry of interactions to reduce the number of calculations in the subroutine for evaluating the acceleration for the Jovian problem. Consider the individual terms in the summation and observe m 33 22 . jii j ji ji r trtrtrt rt rtrt rt 1 Hence, once this term for j is calculated, we can update the acceleration for the second body by symmetry. Using this symmetry, we found that the subroutine for the evaluation of the force term for the Jovian problem reduces to approximately half of the CPU-time. r Unlike the Kepler problem, an analytical solution for the Jovian problem is unavailable. Therefore, numerical experiments using the Jovian problem require a reference solution in order to obtain an estimate of the error in the position and velocity. The reference solution has to be more accurate than the numerical solution. Since we plan to test the numerical integrators near the limit of double- precision arithmetic (16 2.2 0 ), it is essential to use quadruple-precision arithmetic for the reference solution. Therefore, for long-term simulations, obtaining a refer- ence solution can require considerable CPU-time. Different types of errors are discussed throughout this paper. The global error is of major importance in the measurement of the quality of the numerical solution. We measure this global error in position and velocity, and also measure the relative error in energy and angular momentum. For the total error in the system the main source of error is the integration error, which consists of a truncation and round-off error. While performing ac- curate simulations, the round-off error contributes sig- nificantly to the global error because computers store numbers to only a certain precision. So, there will always be a loss of accuracy when performing long-term simula- tions. For fixed-step-size schemes, Brouwer [8] showed that, if the step-size is smaller than a prescribed value, the round-off error for conserved quantities, such as total energy and angular momentum, grows as 1 2 t and for other dynamical variables, such as coordinates of parti- cles, as 2 3 t. This error growth is known as Brouwer’s law in the literature; see, for example, [9,10]. In contrast, when the round-off error is systematic, the power laws become and , respectively. In addition to these aspects, we investigate other effects of the round-off er- ror here. 2 t First we define the types of errors used in this paper. Let yn and yt be the vectors of the solution calculated numerically and the reference solution, respectively, and n y and t y are the vectors of the derivative to the nu- merical and reference solutions, respectively. Then the norm of the global errors in the position and the velocity are given by 22 = ,= rntvnt Ety yEty y , where, 2 is the unweighted L2-norm. Physical systems often have conserved quantities, for example, the total energy H or the total angular momen- tum L as for Kepler’s two-body problem and the Jovian problem. Usually, these quantities will not be conserved exactly by the numerical solution and this derivation provides assessment about the accuracy of the solution. The total energy is defined as 1 2 =1=1 =1 1 , 2 NNN ij ii ijij ij mm Hmv G d where G is the gravitational constant, the mass of the body, i v its velocity, and 2jiij i m =|| th i||rrd the distance between the and bodies. The relative error in the energy can be calculated as th ith j 0 0 , rel H HH where 0 is the total energy at the initial time . However, we use H0=t 0 0 =, rel GH GH HGH to calculate rel , because the value of H=Gm is known more accurately than . m The total angular momentum L and the relative error of the angular momentum are defined as rel L 02 =1 02 = ,= N iiirel i LL LmrvL L , where 0 is the angular momentum at the initial time . Note that a reference solution is not required to calculate rel L 0=t and rel , unlike for the errors in the position and velocity. Hence, less computing resources are needed to measure the performance of the integrators here. However, rel and rel, being scalar quantities, impose only one constraint; if we look at the error in position or velocity then every component of or has to be small. L H L r E v The phase error is the difference between the phase angle of the numerical solution and the reference solution. The phase error is defined by E 22 cos =nt nt yy yy . Copyright © 2013 SciRes. AJCM  S. U. REHMAN Copyright © 2013 SciRes. AJCM 197 2s =1 j hbK j, and the round-off error caused by adding terms on the right-hand side of (1.3). If the integration time-step is small then j j j is small compared to 1n 2 1=1 s n hyhbK y . Hence, the round-off error will be dominated by adding j j to 1n 2 1=1 s nj hbK hy y . In each time-step we estimate the round-off error caused by adding 1=1j to 1n and then update the solution as follows; First, calculate 2 hs nj bK j y hy where is the angle between the numerical solution and the reference solution. 3. Numerical Methods and Integrators Explicit Runge-Kutta-Nyström methods (ERKN) were introduced by E. J. Nyström in 1925 [6]. The efficiency of an ERKN method depends upon the approach for controlling the error in the numerical approximations. One way of controlling the error is to use an adaptive step-size technique. In order to control the local error of a single step, a pair of formulae of different orders is used in such a way that the function evaluations of the two methods are identical. If the numerical solution n is obtained by using the lower-order formula, then the pair is said to be implemented in lower-order mode. However, it is recommended for efficiency reasons that the solution yn be obtained using the higher-order formula for the next step [11], and the pair operated in this fashion is said to be implemented in higher-order mode or local extrapola- tion. In this paper we are using two variable-step-size ERKN integrators: Integrator ERKN689 is a nine stage, 6-8 FSAL pair [12] and integrator ERKN101217 is a seventeen stage, 10-12 non-FSAL pair [12]. y 2 1 =1 =, s njj j hyhb K where δ is the estimated round-off error on the previous time-step (at the start of the integration 0= ). Since =1 j j j and δ are small compared to 1n 2 1 s n hyhbK y , the error caused in the formation of is negligible. The solution is then updated to 1 = , nn Yy and the estimated round-off error for the time-step is calculated as =nn Yy (1.4) The solution is then updated as n . The velocity formula also uses the same concept to control the round- off error. = n yY 3.1. Round-Off Error Control for ERKN Integrators In this paper, we perform experiments with tolerance close to the machine precision (). Therefore, we investigate the possibility of reducing the growth of round-off error in the explicit Runge-Kutta-Nyström in- tegrators using the technique known as compensated summation [13]. The idea of compensated summation is based on estimating the dominant contribution term of the round-off error. To explain the round-off error control technique, we consider the following solution formula 16 2.2 10 2 11 =1 = s nn njj j yy hy hbK . (1.3) We used the round-off error control technique to in- vestigate the maximum error in position (r) and velocity (v) for the Jovian problem described in Sec- tion 2. The integration was performed over years using E 6 10 E =1L2 0i TO , for . Table 1 shows the maximum values of Er and Ev for the explicit Runge- Kutta-Nyström integrators ERKN689 and ERKN101217. The column labelled With contains Er and Ev calculated when the integration is performed with round-off error control, whereas the column labeled Without contains the percentage variation corresponding to the values in column With when calculated Er and Ev by performing integration with-out round-off error control. =4,5,,8i For ERKN6 89, the maximum values for Er and Ev with round-off error control are always less than Er and Ev without round-off error control. The only exception is for , where the values of Er and Ev in the 10 10= TOL Equation (1.3) contains three types of errors; the integration error already in n from the previous time- step, the round-off error in the formation of y 1n hy and Table 1. The maximum values of Er and Ev for ERKN689 and ERKN101217 obtained with and with-out round-off error control applied to the Jovian problem over one million years for the local error tolerances 10−8, 10−10, 10−128, 10−14, 10−16. ERKN689 ERKN101217 Er Ev Er Ev TOL With Without With Without With Without With Without 10−8 4.37 × 10−2 +0.02% 6.31 × 10−5 +0.02% 4.70 × 10−1 +0.21% 6.78 × 10−4 +0.29% 10−10 1.11 × 10−4 −0.91% 1.60 × 10−7 −0.63% 1.63 × 10−3 −0.62% 2.35 × 10−6 −0.86% 10−12 1.70 × 10−6 +71.8% 1.94 × 10−9 +68.9% 4.82 × 10−5 −0.21% 6.63 × 10−8 −0.15% 10−14 9.74 × 10−7 +86.0% 9.35 × 10−10 +84.4% 2.42 × 10−5 −6.61% 3.33 × 10−8 −7.77% 10−16 2.28 × 10−6 +71.0% 1.58 × 10−9 +78.5% 8.71 × 10−6 −7.40% 1.19 × 10−8 −6.25% 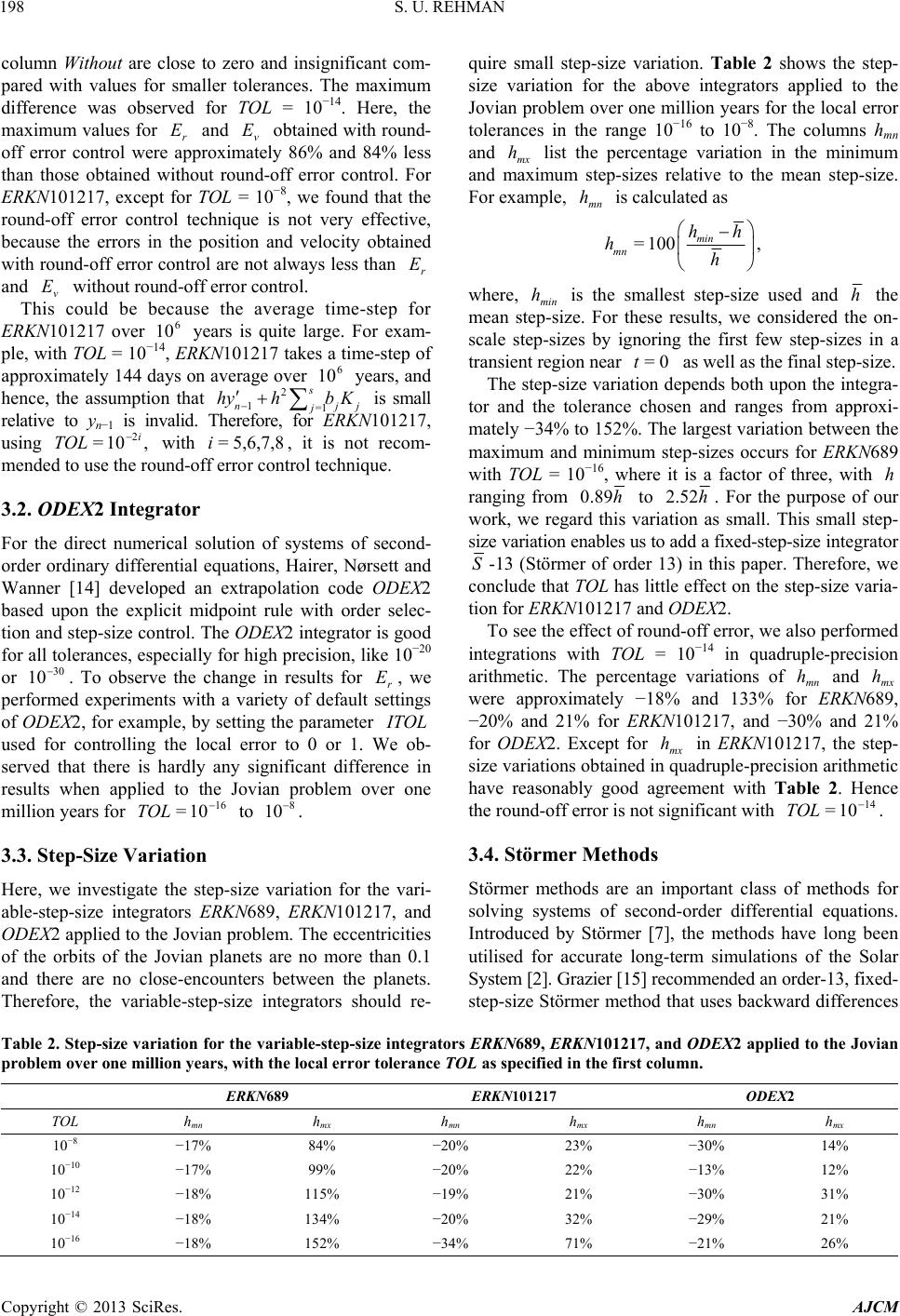 S. U. REHMAN 198 column Without are close to zero and insignificant com- pared with values for smaller tolerances. The maximum difference was observed for TOL = 10−14. Here, the maximum values for r and v obtained with round- off error control were approximately 86% and 84% less than those obtained without round-off error control. For ERKN101217, except for TOL = 10−8, we found that the round-off error control technique is not very effective, because the errors in the position and velocity obtained with round-off error control are not always less than and without round-off error control. E E r E v This could be because the average time-step for ERKN101217 over years is quite large. For exam- ple, with TOL = 10−14, ERKN101217 takes a time-step of approximately 144 days on average over years, and hence, the assumption that =1 nj j j is small relative to yn−1 is invalid. Therefore, for ERKN101217, using with , it is not recom- mended to use the round-off error control technique. E 6 10 6 10 sb K 2 1 hy h 5,6,7,8=i,10= 2i TOL 3.2. ODEX2 Integrator For the direct numerical solution of systems of second- order ordinary differential equations, Hairer, Nørsett and Wanner [14] developed an extrapolation code ODEX2 based upon the explicit midpoint rule with order selec- tion and step-size control. The ODEX2 integrator is good for all tolerances, especially for high precision, like 10−20 or . To observe the change in results for r, we performed experiments with a variety of default settings of ODEX2, for example, by setting the parameter used for controlling the local error to 0 or 1. We ob- served that there is hardly any significant difference in results when applied to the Jovian problem over one million years for to . 30 10E ITOL 16 10= TOL 8 10 3.3. Step-Size Variation Here, we investigate the step-size variation for the vari- able-step-size integrators ERKN689, ERKN101217, and ODEX2 applied to the Jovian problem. The eccentricities of the orbits of the Jovian planets are no more than 0.1 and there are no close-encounters between the planets. Therefore, the variable-step-size integrators should re- quire small step-size variation. Table 2 shows the step- size variation for the above integrators applied to the Jovian problem over one million years for the local error tolerances in the range 10−16 to 10−8. The columns hmn and mx list the percentage variation in the minimum and maximum step-sizes relative to the mean step-size. For example, is calculated as h mn h =100 , min mn hh hh where, min is the smallest step-size used and hh the mean step-size. For these results, we considered the on- scale step-sizes by ignoring the first few step-sizes in a transient region near as well as the final step-size. 0=t The step-size variation depends both upon the integra- tor and the tolerance chosen and ranges from approxi- mately −34% to 152%. The largest variation between the maximum and minimum step-sizes occurs for ERKN689 with TOL = 10−16, where it is a factor of three, with ranging from h 0.89h to h2.52 . For the purpose of our work, we regard this variation as small. This small step- size variation enables us to add a fixed-step-size integrator S-13 (Störmer of order 13) in this paper. Therefore, we conclude that TOL has little effect on the step-size varia- tion for ERKN101217 and ODEX2. To see the effect of round-off error, we also performed integrations with TOL = 10−14 in quadruple-precision arithmetic. The percentage variations of mn and mx were approximately −18% and 133% for ERKN689, −20% and 21% for ERKN101217, and −30% and 21% for ODEX2. Except for mx in ERKN101217, the step- size variations obtained in quadruple-precision arithmetic have reasonably good agreement with Table 2. Hence the round-off error is not significant with . h TOL h 14 h 10= 3.4. Störmer Methods Störmer methods are an important class of methods for solving systems of second-order differential equations. Introduced by Störmer [7], the methods have long been utilised for accurate long-term simulations of the Solar System [2]. Grazier [15] recommended an order-13, fixed- step-size Störmer method that uses backward differences Table 2. Step-size variation for the variable-step-size integrators ERKN689, ERKN101217, and ODEX2 applied to the Jovian problem over one million years, with the local error tolerance TOL as specified in the first column. ERKN689 ERKN101217 ODEX2 TOL hmn h mx hmn hmx hmn hmx 10−8 −17% 84% −20% 23% −30% 14% 10−10 −17% 99% −20% 22% −13% 12% 10−12 −18% 115% −19% 21% −30% 31% 10−14 −18% 134% −20% 32% −29% 21% 10−16 −18% 152% −34% 71% −21% 26% Copyright © 2013 SciRes. AJCM 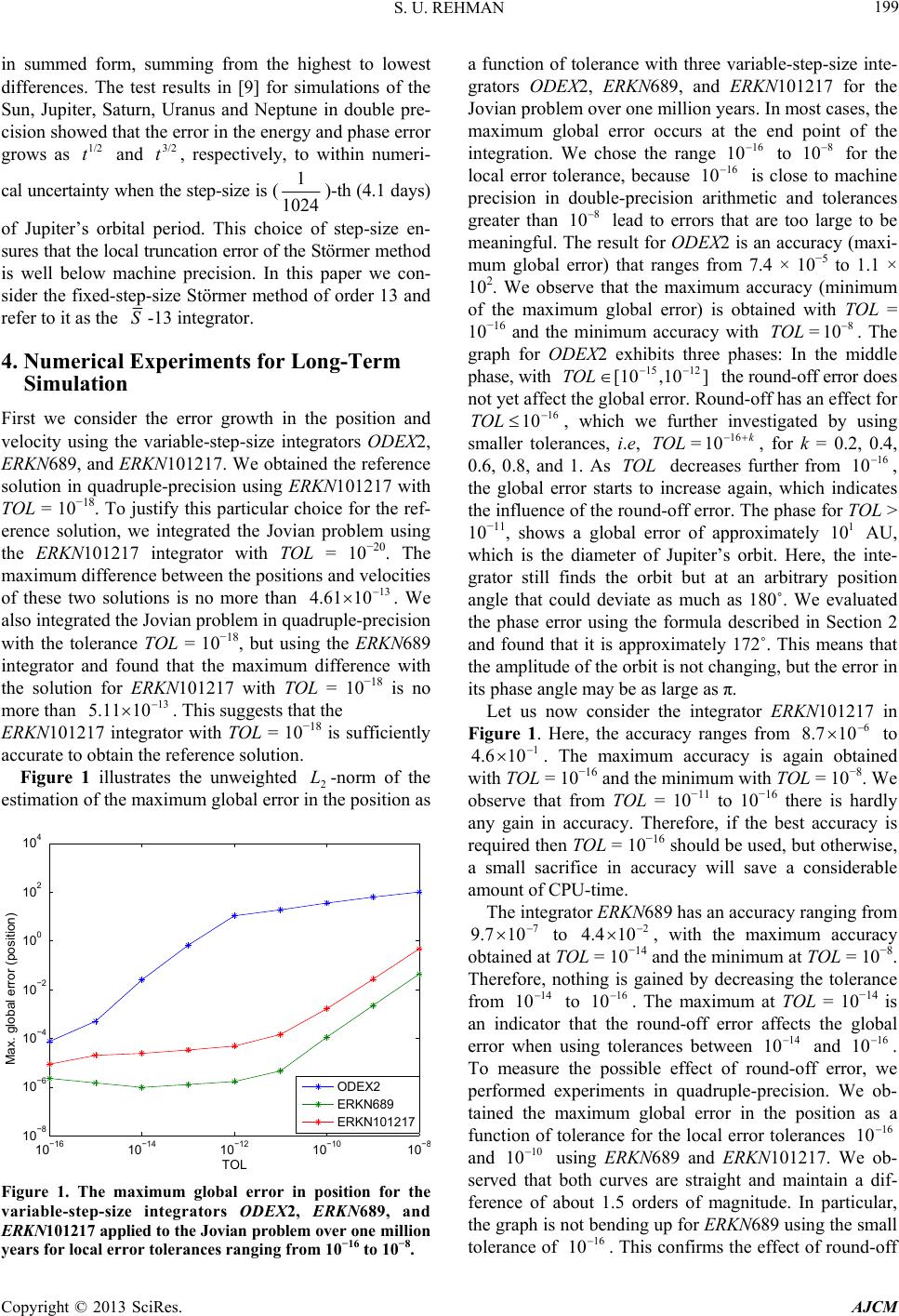 S. U. REHMAN 199 in summed form, summing from the highest to lowest differences. The test results in [9] for simulations of the Sun, Jupiter, Saturn, Uranus and Neptune in double pre- cision showed that the error in the energy and phase error grows as and , respectively, to within numeri- 1/2 t3/2 t cal uncertainty when the step-size is (1024 1)-th (4.1 days) of Jupiter’s orbital period. This choice of step-size en- sures that the local truncation error of the Störmer method is well below machine precision. In this paper we con- sider the fixed-step-size Störmer method of order 13 and refer to it as the S-13 integrator. 4. Numerical Experiments for Long-Term Simulation First we consider the error growth in the position and velocity using the variable-step-size integrators ODEX2, ERKN689, and ERKN101217. We obtained the reference solution in quadruple-precision using ERKN101217 with TOL = 10−18. To justify this particular choice for the ref- erence solution, we integrated the Jovian problem using the ERKN101217 integrator with TOL = 10−20. The maximum difference between the positions and velocities of these two solutions is no more than . We also integrated the Jovian problem in quadruple-precision with the tolerance TOL = 10−18, but using the ERKN689 integrator and found that the maximum difference with the solution for ERKN101217 with TOL = 10−18 is no more than . This suggests that the ERKN101217 integrator with TO L = 10−18 is sufficiently accurate to obtain the reference solution. 13 104.61 13 105.11 Figure 1 illustrates the unweighted 2-norm of the estimation of the maximum global error in the position as L 10−16 10−14 10−12 10−10 10 10−8 10−6 10−4 10−2 100 102 104 Max. global error (position) ODEX2 ERKN689 ERKN101217 Figure 1. The maximum global error in position for the variable-step-size integrators ODEX2, ERKN689, and ERKN101217 applied to the Jovian problem over one million years for local error tolerances ranging from 10−16 to 10−8. a function of tolerance with three variable-step-size inte- grators ODEX2, ERKN689, and ERKN101217 for the Jovian problem over one million years. In most cases, the maximum global error occurs at the end point of the integration. We chose the range to 16 10 8 10 for the local error tolerance, because is close to machine precision in double-precision arithmetic and tolerances greater than 16 10 8 10 lead to errors that are too large to be meaningful. The result for ODEX2 is an accuracy (maxi- mum global error) that ranges from 7.4 × 10−5 to 1.1 × 102. We observe that the maximum accuracy (minimum of the maximum global error) is obtained with TO L = 10−16 and the minimum accuracy with 8 TO =10L . The graph for ODEX2 exhibits three phases: In the middle phase, with the round-off error does not yet affect the global error. Round-off has an effect for , which we further investigated by using smaller tolerances, i.e, , for k = 0.2, 0.4, 0.6, 0.8, and 1. As decreases further from , the global error starts to increase again, which indicates the influence of the round-off error. The phase for TOL > 10−11, shows a global error of approximately AU, which is the diameter of Jupiter’s orbit. Here, the inte- grator still finds the orbit but at an arbitrary position angle that could deviate as much as 180˚. We evaluated the phase error using the formula described in Section 2 and found that it is approximately 172˚. This means that the amplitude of the orbit is not changing, but the error in its phase angle may be as large as π. ] 12 10= ,10[10 15 TOL TOL TOL 16 10 TOL k16 16 10 1 10 Let us now consider the integrator ERKN101217 in Figure 1. Here, the accuracy ranges from to . The maximum accuracy is again obtained with TOL = 10−16 and the minimum with TOL = 10−8. We observe that from TOL = 10−11 to 10−16 there is hardly any gain in accuracy. Therefore, if the best accuracy is required then TOL = 10−16 should be used, but otherwise, a small sacrifice in accuracy will save a considerable amount of CPU-time. 6 108.7 1 104.6 The integrator ERKN689 has an accuracy ranging from to , with the maximum accuracy obtained at TOL = 10−14 and the minimum at TOL = 10−8. Therefore, nothing is gained by decreasing the tolerance from to . The maximum at TOL = 10−14 is an indicator that the round-off error affects the global error when using tolerances between and . To measure the possible effect of round-off error, we performed experiments in quadruple-precision. We ob- tained the maximum global error in the position as a function of tolerance for the local error tolerances and using ERKN689 and ERKN101217. We ob- served that both curves are straight and maintain a dif- ference of about 1.5 orders of magnitude. In particular, the graph is not bending up for ERKN 689 using the small tolerance of . This confirms the effect of round-off 7 109.7 14 10 10 10 2 104.4 16 10 16 10 14 10 16 10 16 10 Copyright © 2013 SciRes. AJCM 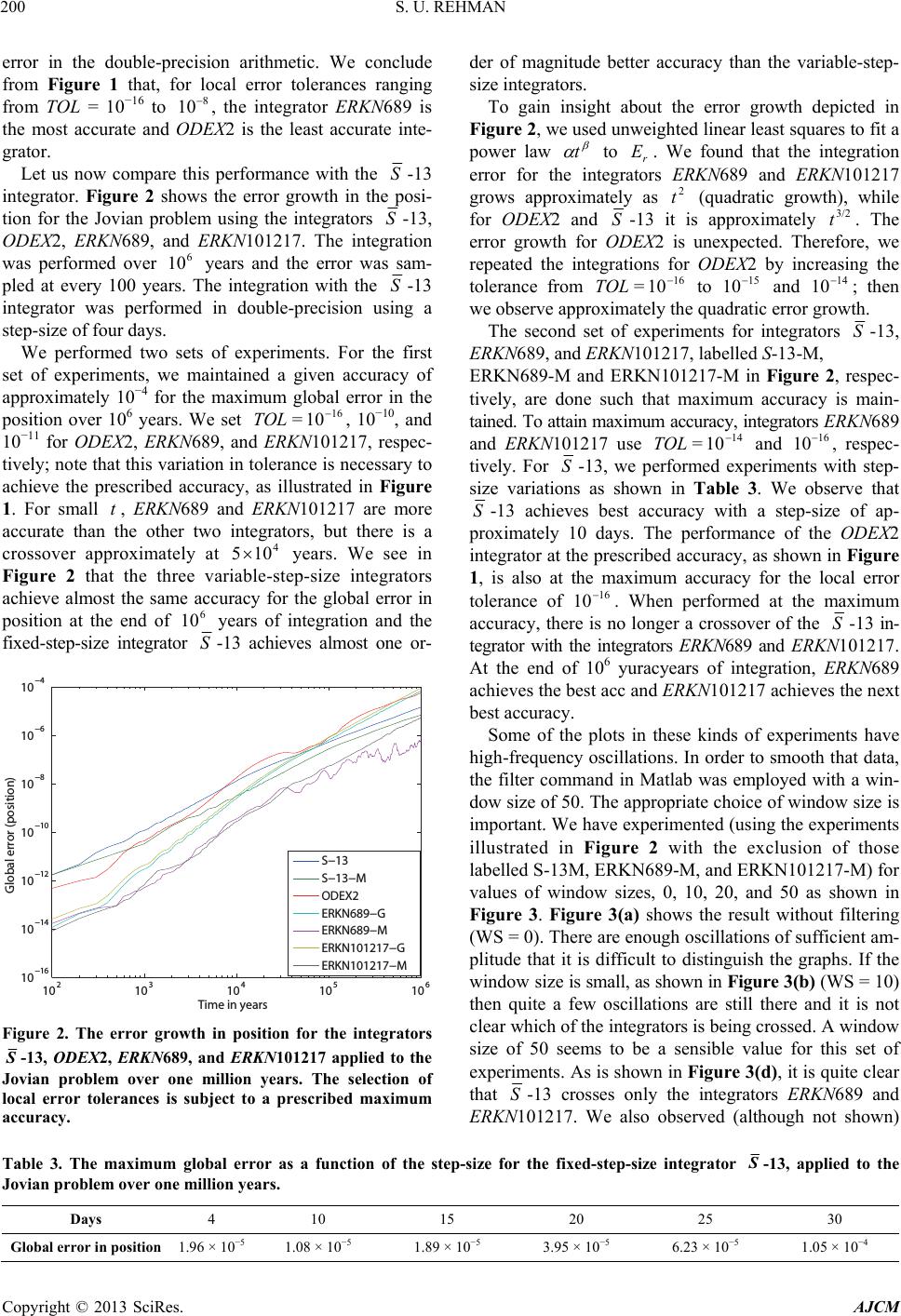 S. U. REHMAN 200 error in the double-precision arithmetic. We conclude from Figure 1 that, for local error tolerances ranging from TOL = 10−16 to , the integrator ERKN689 is the most accurate and ODEX2 is the least accurate inte- grator. 8 10 Let us now compare this performance with the S-13 integrator. Figure 2 shows the error growth in the posi- tion for the Jovian problem using the integrators S-13, ODEX2, ERKN689, and ERKN101217. The integration was performed over years and the error was sam- pled at every 100 years. The integration with the 6 10 S-13 integrator was performed in double-precision using a step-size of four days. We performed two sets of experiments. For the first set of experiments, we maintained a given accuracy of approximately 10−4 for the maximum global error in the position over 106 years. We set , 10−10, and 10−11 for ODEX2, ERKN689, and ERKN 101217, respec- tively; note that this variation in tolerance is necessary to achieve the prescribed accuracy, as illustrated in Figure 1. For small 16 10= TOL , ERKN689 and ERKN101217 are more accurate than the other two integrators, but there is a crossover approximately at 5 years. We see in Figure 2 that the three variable-step-size integrators achieve almost the same accuracy for the global error in position at the end of years of integration and the fixed-step-size integrator 4 10 6 10 S-13 achieves almost one or- 10 2 10 3 10 4 10 5 10 6 10 −16 10 −14 10 −12 10 −10 10 −8 10 −6 10 −4 Time in years Global error (position) S−13 S−13−M ODEX2 ERKN689−G ERKN689−M ERKN101217−G ERKN101217−M Figure 2. The error growth in position for the integrators -13, ODEX2, ERKN689, and ERKN101217 applied to the Jovian problem over one million years. The selection of local error tolerances is subject to a prescribed maximum accuracy. der of magnitude better accuracy than the variable-step- size integrators. To gain insight about the error growth depicted in Figure 2, we used unweighted linear least squares to fit a power law to r. We found that the integration error for the integrators ERKN689 and ERKN101217 grows approximately as (quadratic growth), while for ODEX2 and t E 2 t S-13 it is approximately . The error growth for ODEX2 is unexpected. Therefore, we repeated the integrations for ODEX2 by increasing the tolerance from to and ; then we observe approximately the quadratic error growth. 3/2 t 14 1016 10=TOL15 10 The second set of experiments for integrators S-13, ERKN689, and ERKN101217, labelled S-13-M, ERKN689-M and ERKN101217-M in Figure 2, respec- tively, are done such that maximum accuracy is main- tained. To attain maximum accuracy, integrators ERKN689 and ERKN101217 use and 14 10= TOL 16 10 , respec- tively. For S-13, we performed experiments with step- size variations as shown in Table 3. We observe that S-13 achieves best accuracy with a step-size of ap- proximately 10 days. The performance of the ODEX2 integrator at the prescribed accuracy, as shown in Figure 1, is also at the maximum accuracy for the local error tolerance of . When performed at the maximum accuracy, there is no longer a crossover of the 16 10 S-13 in- tegrator with the integrators ERKN689 and ERKN101217. At the end of 106 yuracyears of integration, ERKN689 achieves the best acc and ERKN101217 achieves the next best accuracy. Some of the plots in these kinds of experiments have high-frequency oscillations. In order to smooth that data, the filter command in Matlab was employed with a win- dow size of 50. The appropriate choice of window size is important. We have experimented (using the experiments illustrated in Figure 2 with the exclusion of those labelled S-13M, ERKN689-M, and ERKN101217-M) for values of window sizes, 0, 10, 20, and 50 as shown in Figure 3. Figure 3(a) shows the result without filtering (WS = 0). There are enough oscillations of sufficient am- plitude that it is difficult to distinguish the graphs. If the window size is small, as shown in Figure 3(b) (WS = 10) then quite a few oscillations are still there and it is not clear which of the integrators is being crossed. A window size of 50 seems to be a sensible value for this set of experiments. As is shown in Figure 3(d), it is quite clear that S-13 crosses only the integrators ERKN689 and ERKN101217. We also observed (although not shown) Table 3. The maximum global error as a function of the step-size for the fixed-step-size integrator -13, applied to the Jovian problem over one million years. Days 4 10 15 20 25 30 Global error in position 1.96 × 10−5 1.08 × 10−5 1.89 × 10−5 3.95 × 10−5 6.23 × 10−5 1.05 × 10−4 Copyright © 2013 SciRes. AJCM 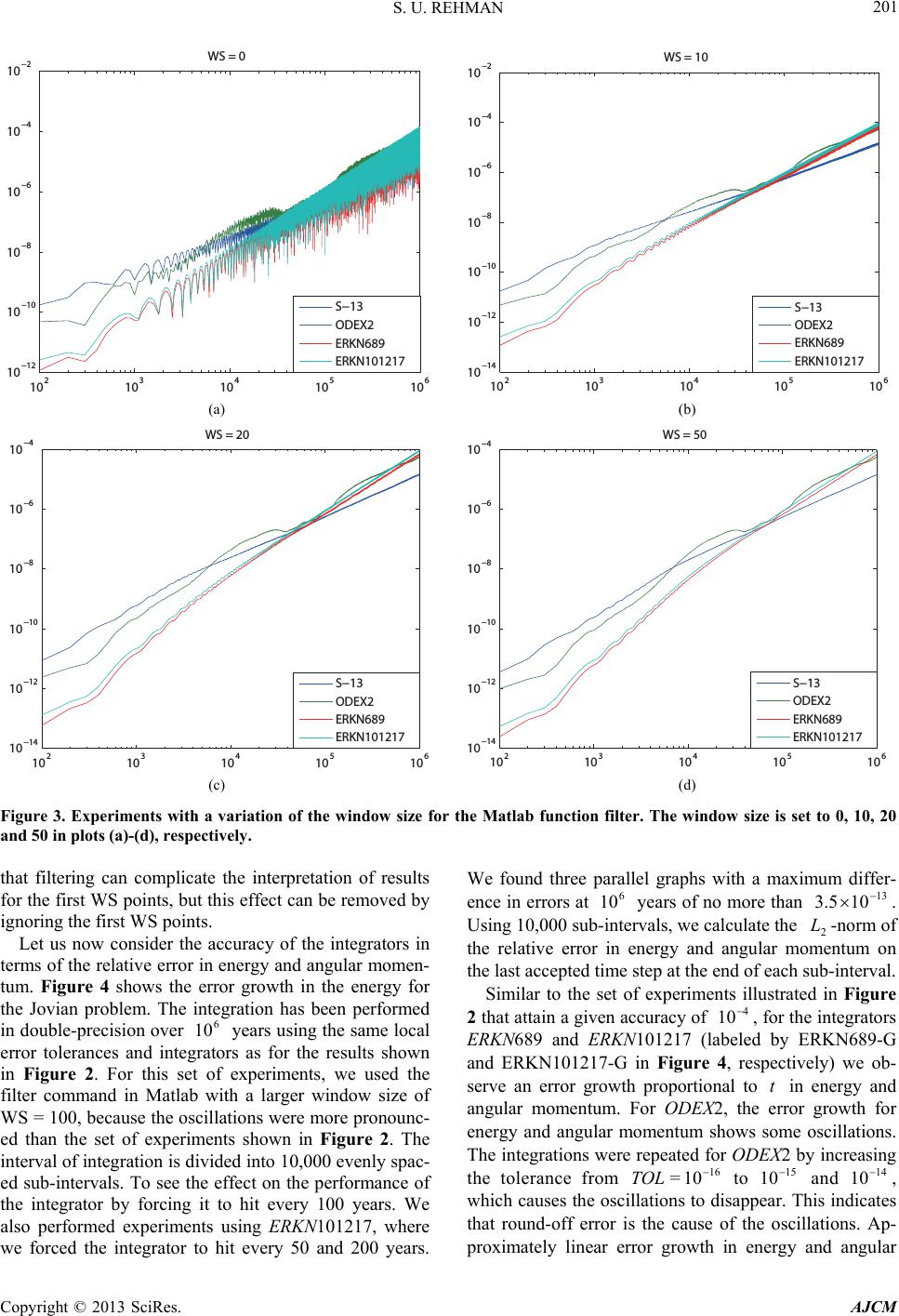 S. U. REHMAN 201 10 2 10 3 10 4 10 5 10 6 10 −12 10 −10 10 −8 10 −6 10 −4 10 −2 WS = 0 S−13 ODEX2 ERKN689 ERKN101217 10 2 10 3 10 4 10 5 10 6 10 −14 10 −12 10 −10 10 −8 10 −6 10 −4 10 −2 WS = 10 S−13 ODEX2 ERKN689 ERKN101217 (a) (b) 10 2 10 3 10 4 10 5 10 6 10 −14 10 −12 10 −10 10 −8 10 −6 10 −4 WS = 20 S−13 ODEX2 ERKN689 ERKN101217 10 2 10 3 10 4 10 5 10 6 10 −14 10 −12 10 −10 10 −8 10 −6 10 −4 WS = 50 S−13 ODEX2 ERKN689 ERKN101217 (c) (d) Figure 3. Experiments with a variation of the window size for the Matlab function filter. The window size is set to 0, 10, 20 and 50 in plots (a)-(d), respectively. that filtering can complicate the interpretation of results for the first WS points, but this effect can be removed by ignoring the first WS points. Let us now consider the accuracy of the integrators in terms of the relative error in energy and angular momen- tum. Figure 4 shows the error growth in the energy for the Jovian problem. The integration has been performed in double-precision over years using the same local error tolerances and integrators as for the results shown in Figure 2. For this set of experiments, we used the filter command in Matlab with a larger window size of WS = 100, because the oscillations were more pronounc- ed than the set of experiments shown in Figure 2. The interval of integration is divided into 10,000 evenly spac- ed sub-intervals. To see the effect on the performance of the integrator by forcing it to hit every 100 years. We also performed experiments using ERKN101217, where we forced the integrator to hit every 50 and 200 years. 6 10 We found three parallel graphs with a maximum differ- ence in errors at years of no more than . Using 10,000 sub-intervals, we calculate the 2-norm of the relative error in energy and angular momentum on the last accepted time step at the end of each sub-interval. 6 10 13 103.5 L Similar to the set of experiments illustrated in Figure 2 that attain a given accuracy of , for the integrators ERKN689 and ERKN101217 (labeled by ERKN689-G and ERKN101217-G in Figure 4, respectively) we ob- serve an error growth proportional to 4 10 in energy and angular momentum. For ODEX2, the error growth for energy and angular momentum shows some oscillations. The integrations were repeated for ODEX2 by increasing the tolerance from to and , which causes the oscillations to disappear. This indicates that round-off error is the cause of the oscillations. Ap- proximately linear error growth in energy and angular 16 10= TOL 15 1014 10 Copyright © 2013 SciRes. AJCM 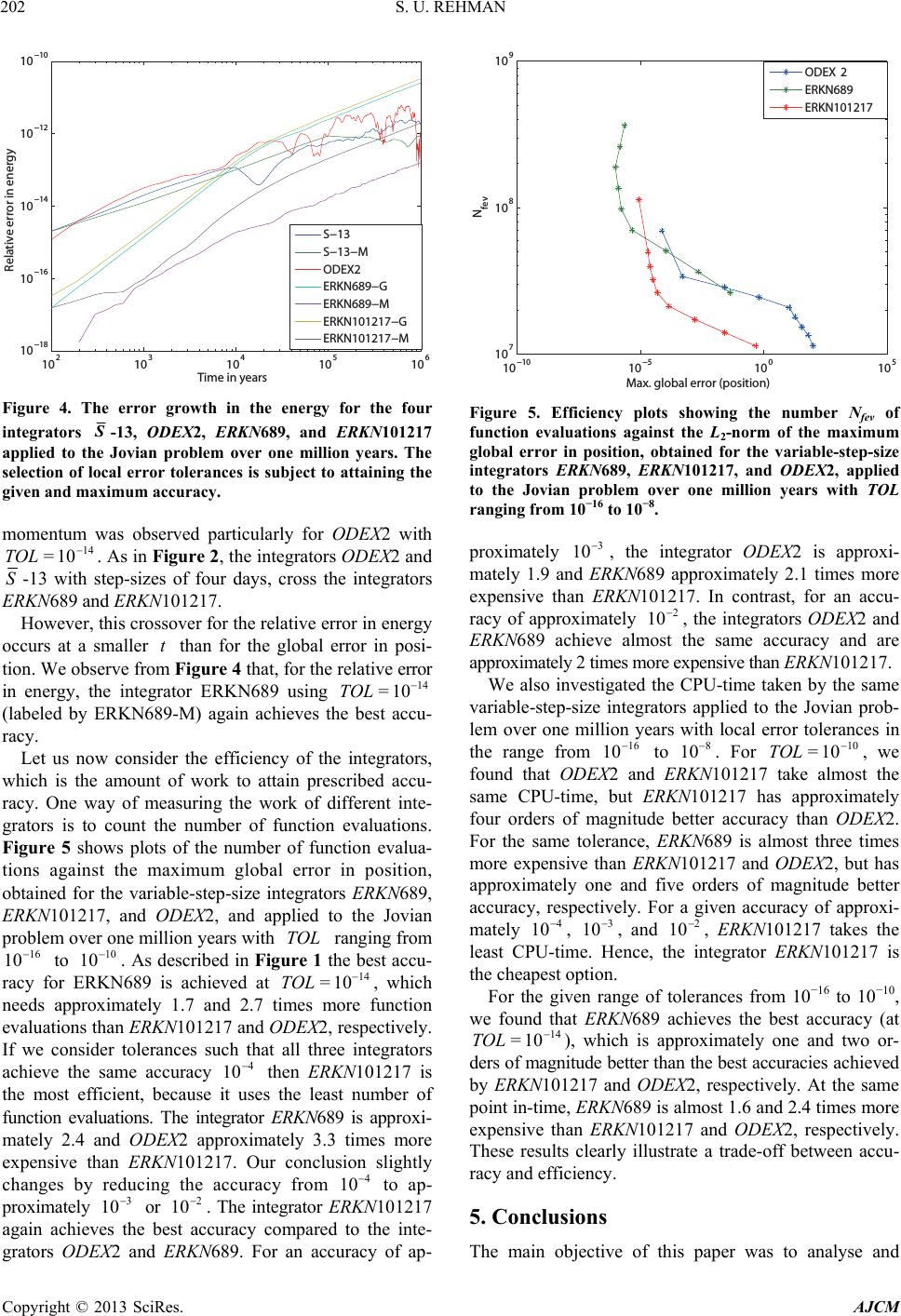 S. U. REHMAN 202 10 2 10 3 10 4 10 5 10 6 10 −18 10 −16 10 −14 10 −12 10 −10 Time in years Relative error in energy S−13 S−13−M ODEX2 ERKN689−G ERKN689−M ERKN101217−G ERKN101217−M Figure 4. The error growth in the energy for the four integrators -13, ODEX2, ERKN689, and ERKN101217 applied to the Jovian problem over one million years. The selection of local error tolerances is subject to attaining the given and maximum accuracy. momentum was observed particularly for ODEX2 with . As in Figure 2, the integrators ODEX2 and 14 10= TOL S-13 with step-sizes of four days, cross the integrators ERKN689 and ERKN101217. However, this crossover for the relative error in energy occurs at a smaller than for the global error in posi- tion. We observe from Figure 4 that, for the relative error in energy, the integrator ERKN689 using 14 =10TOL (labeled by ERKN689-M) again achieves the best accu- racy. Let us now consider the efficiency of the integrators, which is the amount of work to attain prescribed accu- racy. One way of measuring the work of different inte- grators is to count the number of function evaluations. Figure 5 shows plots of the number of function evalua- tions against the maximum global error in position, obtained for the variable-step-size integrators ERKN689, ERKN101217, and ODEX2, and applied to the Jovian problem over one million years with ranging from to . As described in Figure 1 the best accu- racy for ERKN689 is achieved at , which needs approximately 1.7 and 2.7 times more function evaluations than ERKN101217 and ODEX2, respectively. If we consider tolerances such that all three integrators achieve the same accuracy then ERKN101217 is the most efficient, because it uses the least number of function evaluations. The integrator ERKN689 is approxi- mately 2.4 and ODEX2 approximately 3.3 times more expensive than ERKN101217. Our conclusion slightly changes by reducing the accuracy from TOL TOL 16 10 10 10 14 =10 4 10 4 10 to ap- proximately or . The integrator ERKN101217 again achieves the best accuracy compared to the inte- grators ODEX2 and ERKN689. For an accuracy of ap- 3 10 2 10 10 −10 10 −5 10 0 10 5 10 7 10 8 10 9 Max. global error (position) N fev ODEX 2 ERKN689 ERKN101217 Figure 5. Efficiency plots showing the number Nfev of function evaluations against the L2-norm of the maximum global error in position, obtained for the variable-step-size integrators ERKN689, ERKN101217, and ODEX2, applied to the Jovian problem over one million years with TOL ranging from 10−16 to 10−8. proximately , the integrator ODEX2 is approxi- mately 1.9 and ERKN689 approximately 2.1 times more expensive than ERKN101217. In contrast, for an accu- racy of approximately , the integrators ODEX2 and ERKN689 achieve almost the same accuracy and are approximately 2 times more expensive than ERKN101217. 3 10 2 10 We also investigated the CPU-time taken by the same variable-step-size integrators applied to the Jovian prob- lem over one million years with local error tolerances in the range from to . For , we found that ODEX2 and ERKN101217 take almost the same CPU-time, but ERKN101217 has approximately four orders of magnitude better accuracy than ODEX2. For the same tolerance, ER KN689 is almost three times more expensive than ERKN101217 and ODEX2, but has approximately one and five orders of magnitude better accuracy, respectively. For a given accuracy of approxi- mately , , and , ERKN101217 takes the least CPU-time. Hence, the integrator ERKN101217 is the cheapest option. 16 10 3 8 10 2 10 10 10= TOL 4 10 10 For the given range of tolerances from 10−16 to 10−10, we found that ERKN689 achieves the best accuracy (at ), which is approximately one and two or- ders of magnitude better than the best accuracies achieved by ERKN101217 and ODEX2, respectively. At the same point in-time, ERKN689 is almost 1.6 and 2.4 times more expensive than ERKN101217 and ODEX2, respectively. These results clearly illustrate a trade-off between accu- racy and efficiency. 14 10= TOL 5. Conclusions The main objective of this paper was to analyse and Copyright © 2013 SciRes. AJCM 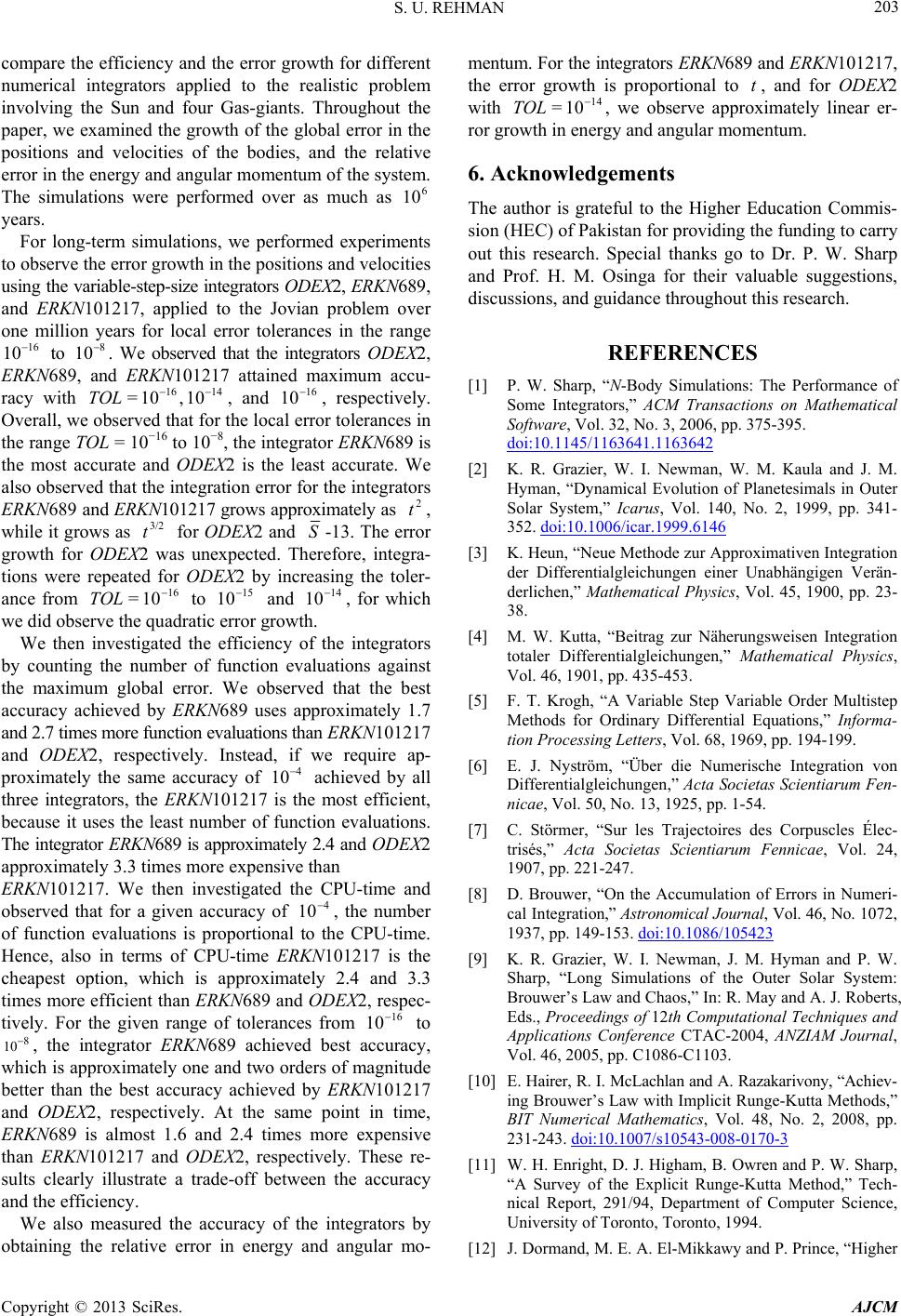 S. U. REHMAN 203 compare the efficiency and the error growth for different numerical integrators applied to the realistic problem involving the Sun and four Gas-giants. Throughout the paper, we examined the growth of the global error in the positions and velocities of the bodies, and the relative error in the energy and angular momentum of the system. The simulations were performed over as much as years. 6 10 For long-term simulations, we performed experiments to observe the error growth in the positions and velocities using the variable-step-size integrators ODEX2, ERKN689, and ERKN101217, applied to the Jovian problem over one million years for local error tolerances in the range to . We observed that the integrators ODEX2, ERKN689, and ERKN101217 attained maximum accu- racy with , and , respectively. Overall, we observed that for the local error tolerances in the range TOL = 10−16 to 10−8, the integrator ERKN689 is the most accurate and ODEX2 is the least accurate. We also observed that the integration error for the integrators ERKN689 and ERKN101217 grows approximately as , while it grows as for ODEX2 and 16 108 10 TO 16 14 =10 ,10L 3/2 t 16 10 2 t S-13. The error growth for ODEX2 was unexpected. Therefore, integra- tions were repeated for ODEX2 by increasing the toler- ance from to and , for which we did observe the quadratic error growth. 16 10= 10TOL 1514 10 We then investigated the efficiency of the integrators by counting the number of function evaluations against the maximum global error. We observed that the best accuracy achieved by ERKN689 uses approximately 1.7 and 2.7 times more function evaluations than ERKN101217 and ODEX2, respectively. Instead, if we require ap- proximately the same accuracy of achieved by all three integrators, the ERKN101217 is the most efficient, because it uses the least number of function evaluations. The integrator ERKN689 is approximately 2.4 and ODEX2 approximately 3.3 times more expensive than ERKN101217. We then investigated the CPU-time and observed that for a given accuracy of , the number of function evaluations is proportional to the CPU-time. Hence, also in terms of CPU-time ERKN101217 is the cheapest option, which is approximately 2.4 and 3.3 times more efficient than ERKN689 and ODEX2, respec- tively. For the given range of tolerances from to , the integrator ERKN689 achieved best accuracy, which is approximately one and two orders of magnitude better than the best accuracy achieved by ERKN101217 and ODEX2, respectively. At the same point in time, ERKN689 is almost 1.6 and 2.4 times more expensive than ERKN101217 and ODEX2, respectively. These re- sults clearly illustrate a trade-off between the accuracy and the efficiency. 4 10 10 4 16 10 8 10 We also measured the accuracy of the integrators by obtaining the relative error in energy and angular mo- mentum. For the integrators ERKN689 and ERKN101217, the error growth is proportional to , and for ODEX2 with , we observe approximately linear er- ror growth in energy and angular momentum. 14 10= TOL 6. Acknowledgements The author is grateful to the Higher Education Commis- sion (HEC) of Pakistan for providing the funding to carry out this research. Special thanks go to Dr. P. W. Sharp and Prof. H. M. Osinga for their valuable suggestions, discussions, and guidance throughout this research. REFERENCES [1] P. W. Sharp, “N-Body Simulations: The Performance of Some Integrators,” ACM Transactions on Mathematical Software, Vol. 32, No. 3, 2006, pp. 375-395. doi:10.1145/1163641.1163642 [2] K. R. Grazier, W. I. Newman, W. M. Kaula and J. M. Hyman, “Dynamical Evolution of Planetesimals in Outer Solar System,” Icarus, Vol. 140, No. 2, 1999, pp. 341- 352. doi:10.1006/icar.1999.6146 [3] K. Heun, “Neue Methode zur Approximativen Integration der Differentialgleichungen einer Unabhängigen Verän- derlichen,” Mathematical Physics, Vol. 45, 1900, pp. 23- 38. [4] M. W. Kutta, “Beitrag zur Näherungsweisen Integration totaler Differentialgleichungen,” Mathematical Physics, Vol. 46, 1901, pp. 435-453. [5] F. T. Krogh, “A Variable Step Variable Order Multistep Methods for Ordinary Differential Equations,” Informa- tion Processing Letters, Vol. 68, 1969, pp. 194-199. [6] E. J. Nyström, “Über die Numerische Integration von Differentialgleichungen,” Acta Societas Scientiarum Fen- nicae, Vol. 50, No. 13, 1925, pp. 1-54. [7] C. Störmer, “Sur les Trajectoires des Corpuscles Élec- trisés,” Acta Societas Scientiarum Fennicae, Vol. 24, 1907, pp. 221-247. [8] D. Brouwer, “On the Accumulation of Errors in Numeri- cal Integration,” Astronomical Journal, Vol. 46, No. 1072, 1937, pp. 149-153. doi:10.1086/105423 [9] K. R. Grazier, W. I. Newman, J. M. Hyman and P. W. Sharp, “Long Simulations of the Outer Solar System: Brouwer’s Law and Chaos,” In: R. May and A. J. Roberts, Eds., Proceedings of 12th Computational Techniques and Applications Conference CTAC-2004, ANZIAM Journal, Vol. 46, 2005, pp. C1086-C1103. [10] E. Hairer, R. I. McLachlan and A. Razakarivony, “Achiev- ing Brouwer’s Law with Implicit Runge-Kutta Methods,” BIT Numerical Mathematics, Vol. 48, No. 2, 2008, pp. 231-243. doi:10.1007/s10543-008-0170-3 [11] W. H. Enright, D. J. Higham, B. Owren and P. W. Sharp, “A Survey of the Explicit Runge-Kutta Method,” Tech- nical Report, 291/94, Department of Computer Science, University of Toronto, Toronto, 1994. [12] J. Dormand, M. E. A. El-Mikkawy and P. Prince, “Higher Copyright © 2013 SciRes. AJCM  S. U. REHMAN Copyright © 2013 SciRes. AJCM 204 Order Embedded Runge-Kutta-Nyström Formulae,” IMA Journal of Numerical Analysis, Vol. 7, No. 4, 1987, pp. 423-430. doi:10.1093/imanum/7.4.423 [13] L. F. Shampine and M. K. Gordon, “Computer Solution of Ordinary Differential Equations,” W. H. Freeman, San Francisco, 1975. [14] E. Hairer, S. P. Nørsett and G. Wanner, “Solving Ordi- nary Differential Equations I: Nonstiff Problems,” Sprin- ger-Verlag, Berlin, 1987. [15] K. R. Grazier, “The Stability of Planetesimal Niches in the Outer Solar System: A Numerical Investigation,” PhD Thesis, University of California, 1997.
|