Energy and Power Engineering, 2013, 5, 24-27
doi:10.4236/epe.2013.53B006 Published Online May 2013 (http://www.scirp.org/journal/epe)
An Automatic Synchronization Method for Distributed
Power Electro nics System
Cheng Zhang1, Chi Sun2, Sheng Ai2
1College of Electrical and Electronic Engineering, Huazhong University of Science and Technology, Wuhan, China
2National Key Laboratory for Vessel Integrated Power System Technology, Naval University of Engineering, Wuhan, China
Email: zcxs417@163.com
Received 2013
ABSTRACT
Currently, the high-speed serial fiber-optic ring net communication is a main method for performing the distributed
control network topology and control mode. Because of a network transmission delay inherent in the topology, syn-
chronization between nodes has become a critical issue which needs to be studied. The existing synchronization meth-
ods largely depend on the complex communication protocol. Therefore, this paper has proposed a method of automatic
measurement and compensation of synchronization delay, and analyzed its operating principle and implementation
procedure in detail. The results obtained from the experiments prove the proposed method to be correct, effective and
practicable.
Keywords: Power Electronics Converter System(PECS); Distributed Control; Delay Automatic Measurement;
Synchronization
1. Introduction
With the advent of power electronics building blocks
(PEBB), the conventional centralized control mode tends
to be replaced by the distributed control network topol-
ogy and control mode in the high-capacity PECS. Cur-
rently, the high-speed serial fiber-optic ring net commu-
nication is a main method for performing the complex
distributed control, lots of references [1-10] are found to
have made an extensive study of the high-speed serial
fiber-optic communication network topology. Because of
a network transmission delay inherent in the topology,
the solution to the synchronization between the nodes of
the system has become critical in the high-speed serial
fiber-optic ring net topology.
The synchronization method of the high-speed serial
fiber-optic ring net communication was analyzed and
studied in [2-7]. A synchronization method based on PES
Net fiber-optic ring net communication was analyzed in
[2-5]. The synchronization method used for PES Net is
based on the communication protocol defined by the user.
In the protocol, the delay between the nodes is preset by
the user. If there is a change in the delay between the
nodes, it is necessary to modify the communication pro-
tocol so as to limit the system in applications due to low
flexibility. A dual fiber-optic ring net(DRPES Net) pro-
posed in [6,7] helps improve the system’s redundancy
and reliability. A communication network topology
based on the hardware switching data source proposed in
[10] can greatly reduce the delay of the whole network,
with an error in the delay between the nodes as 60ns, but
has not taken into account the effect of the lengths of
fiber-optic lines between the nodes on the system’s syn-
chronization delay compensation.
This paper has presented a method for the automatic
measurement and compensation of the system’s synchro-
nization delay. The method can automatically calculate
the overall network transmission delay and total number
of salve nodes of the system and can according to differ-
ent lengths of the fiber optical lines used, work out the
processing delay of communication data and command
through each slave node, thereby compensating for the
synchronization delay of each node in the system auto-
matically.
2. Synchronization of the High-speed Fiber
Optic Ring Net Communication Network
for the PECS
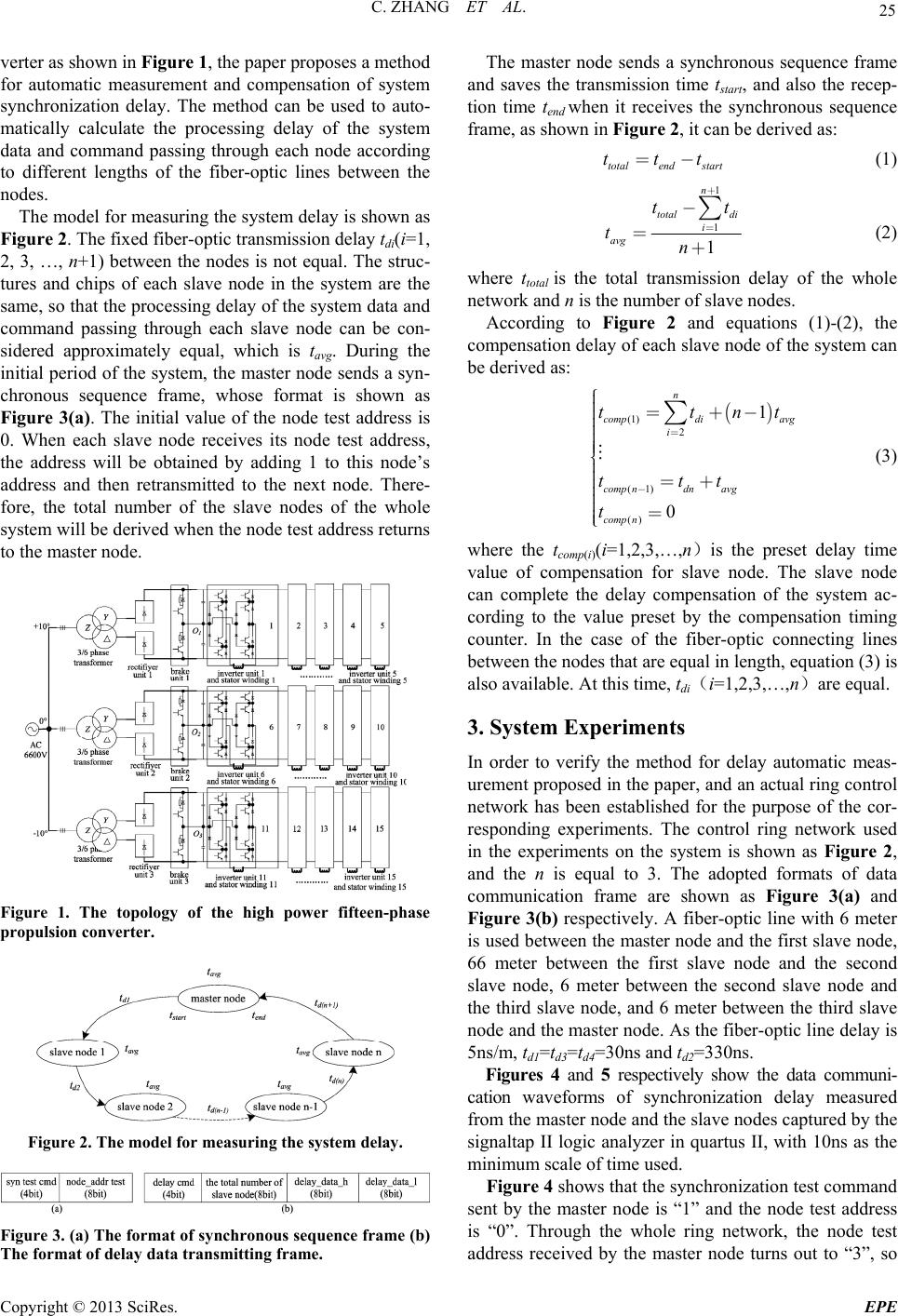
The topology of the high-power fifteen-phase propulsion
converter for marine propulsion is shown as Figure 1.
Each inverter unit and brake unit is regarded as a node.
There are 18 slave nodes altogether, with each node
equipped with a slave controller. The whole control net-
work is formed into a ring net with the communication
rate of 125 Mbps by a single optical fiber. It can be seen
from Figure 1 that the distance between nodes of the
system is unequal in the actual laying-out. For the con-
Copyright © 2013 SciRes. EPE