 Int. J. Communications, Network and System Sciences, 2013, 6, 351-360 http://dx.doi.org/10.4236/ijcns.2013.68038 Published Online August 2013 (http://www.scirp.org/journal/ijcns) Smart Street Lighting Control and Monitoring System for Electrical Power Saving by Using VANET Samir A. Elsagheer Mohamed1,2 1College of Computer, Qassim University, Buryadah, KSA 2Electrical Engineering Department, Faculty of Engineering, Asswan University, Aswan, Egypt Email: samhmd@qu.edu.sa, samirahmed@yahoo.com Received September 15, 2012; revised January 15, 2013; accepted February 15, 2013 Copyright © 2013 Samir A. Elsagheer Mohamed. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT The huge amount of electrical power of many countries is consumed in lighting the streets. However, vehicles pass with very low rate in specific periods of time and parts of the streets are not occupied by vehicles over time. In this paper, we propose a system that automatically switches off the light for the parts of the streets having no vehicles and turns on the light for these parts once there are some vehicles that are going to come. Logically, this system may save a large amount of the electrical power. In addition, it may increase the lifetime of the lamps and reduce the pollutions. This system automatically controls and monitors the light of the streets. It can light only the parts that have vehicles and help on the maintenance of the lighting equipments. Vehicular Ad-Hoc Networks (VANET) make it possible to propose such sys- tem. VANET enables the possibility to know the presence of vehicles, their locations, their directions and their speeds in real time. These quantities are what are needed to develop this system. An advantage of using VANET is that there is no need to use specific network and equipments to design the system, but VANET infrastructure will be used. This de- creases the cost and speed up the deployment of such system. This paper focuses on the proposal of different possible architectures of this system. Results show that the saved energy may reach up to 65% and an increase of the lifetime of the lamps of 53%. Keywords: Vehicular Ad-Hoc Networks; Street Lighting System; Power Saving; System Control; Monitoring 1. Introduction One of the most important civilization indexes is the de- velopment of a good transportation network. This includes streets, roads and highways that have to be adequately illuminated so that a sufficient visibility is guaranteed in order to decrease the accident rate and increase the flow of the vehicles and safety. However, these streets and roads are illuminated constantly for more than 13 hours daily. This in turn requires a huge amount of electrical power to light all the streets and roads. About 30% of the total electrical power of any country is consumed in light- ing the roads and the streets [1]. The spending cost for the energy is high. Additionally, environment pollution by the emitted CO2 is too high (See Table 1 for the esti- mated electricity use, cost and CO2 emissions for differ- ent locations in the world). We also know that for some roads, vehicles pass with very small rate in specific periods of time. In other words, if we divide the roads into small parts, with each part has a length of 500 meters (the minimum visibility range), we can find that in many roads only a very small number of these parts have vehicles that pass through them and the rest of the parts have no vehicles, but still consuming electrical power. This is a dynamic problem that means that any part of the road can be free and then shortly be occupied then free again, etc. That raises a natural question which is: is it possible to automatically cut the electricity for the parts of the roads that do not have vehicles and resume the current for these parts once there are some vehicles that are going to come? If this system could be implemented, it can save very large amount of the electrical power that can be used to develop other areas in the country. It can also increase the lifetime of the Lamps and hence decrease the main- tenance cost. Another benefit is to reduce the environ- ment pollution. Actually one reason that made it impossible to develop such a system in the past is that the presence of vehicles on any part of the road has to be known. In addition, it has to be known when some vehicles are going to enter to these parts shortly in order to decide on switching the C opyright © 2013 SciRes. IJCNS 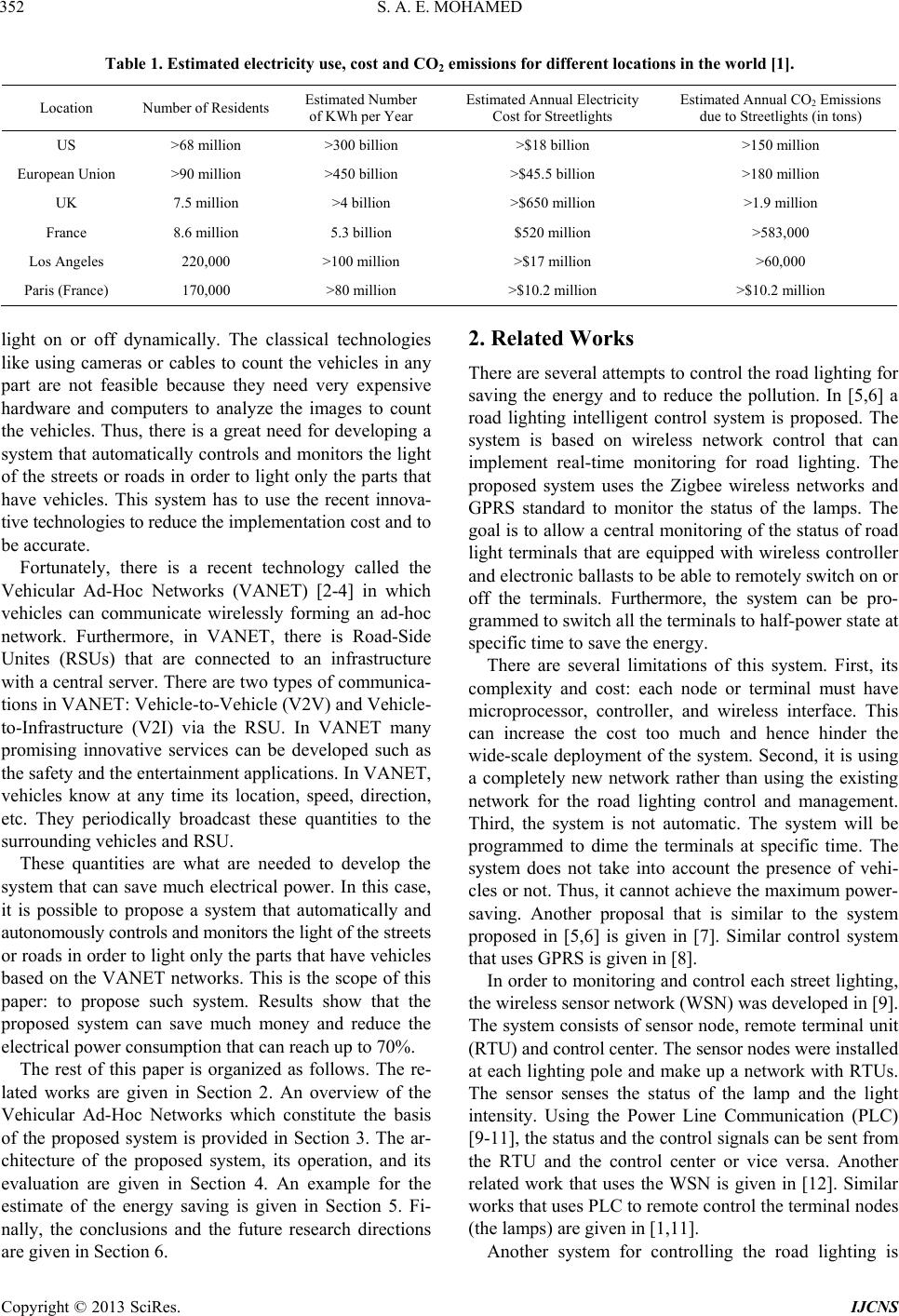 S. A. E. MOHAMED 352 Table 1. Estimated electricity use, cost and CO2 emissions for different locations in the world [1]. Location Number of Residents Estimated Number of KWh per Year Estimated Annual Electricity Cost for Streetlights Estimated Annual CO2 Emissions due to Streetlights (in tons) US >68 million >300 billion >$18 billion >150 million European Union >90 million >450 billion >$45.5 billion >180 million UK 7.5 million >4 billion >$650 million >1.9 million France 8.6 million 5.3 billion $520 million >583,000 Los Angeles 220,000 >100 million >$17 million >60,000 Paris (France) 170,000 >80 million >$10.2 million >$10.2 million light on or off dynamically. The classical technologies like using cameras or cables to count the vehicles in any part are not feasible because they need very expensive hardware and computers to analyze the images to count the vehicles. Thus, there is a great need for developing a system that automatically controls and monitors the light of the streets or roads in order to light only the parts that have vehicles. This system has to use the recent innova- tive technologies to reduce the implementation cost and to be accurate. Fortunately, there is a recent technology called the Vehicular Ad-Hoc Networks (VANET) [2-4] in which vehicles can communicate wirelessly forming an ad-hoc network. Furthermore, in VANET, there is Road-Side Unites (RSUs) that are connected to an infrastructure with a central server. There are two types of communica- tions in VANET: Vehicle-to-Vehicle (V2V) and Vehicle- to-Infrastructure (V2I) via the RSU. In VANET many promising innovative services can be developed such as the safety and the entertainment applications. In VANET, vehicles know at any time its location, speed, direction, etc. They periodically broadcast these quantities to the surrounding vehicles and RSU. These quantities are what are needed to develop the system that can save much electrical power. In this case, it is possible to propose a system that automatically and autonomously controls and monitors the light of the streets or roads in order to light only the parts that have vehicles based on the VANET networks. This is the scope of this paper: to propose such system. Results show that the proposed system can save much money and reduce the electrical power consumption that can reach up to 70%. The rest of this paper is organized as follows. The re- lated works are given in Section 2. An overview of the Vehicular Ad-Hoc Networks which constitute the basis of the proposed system is provided in Section 3. The ar- chitecture of the proposed system, its operation, and its evaluation are given in Section 4. An example for the estimate of the energy saving is given in Section 5. Fi- nally, the conclusions and the future research directions are given in Section 6. 2. Related Works There are several attempts to control the road lighting for saving the energy and to reduce the pollution. In [5,6] a road lighting intelligent control system is proposed. The system is based on wireless network control that can implement real-time monitoring for road lighting. The proposed system uses the Zigbee wireless networks and GPRS standard to monitor the status of the lamps. The goal is to allow a central monitoring of the status of road light terminals that are equipped with wireless controller and electronic ballasts to be able to remotely switch on or off the terminals. Furthermore, the system can be pro- grammed to switch all the terminals to half-power state at specific time to save the energy. There are several limitations of this system. First, its complexity and cost: each node or terminal must have microprocessor, controller, and wireless interface. This can increase the cost too much and hence hinder the wide-scale deployment of the system. Second, it is using a completely new network rather than using the existing network for the road lighting control and management. Third, the system is not automatic. The system will be programmed to dime the terminals at specific time. The system does not take into account the presence of vehi- cles or not. Thus, it cannot achieve the maximum power- saving. Another proposal that is similar to the system proposed in [5,6] is given in [7]. Similar control system that uses GPRS is given in [8]. In order to monitoring and control each street lighting, the wireless sensor network (WSN) was developed in [9]. The system consists of sensor node, remote terminal unit (RTU) and control center. The sensor nodes were installed at each lighting pole and make up a network with RTUs. The sensor senses the status of the lamp and the light intensity. Using the Power Line Communication (PLC) [9-11], the status and the control signals can be sent from the RTU and the control center or vice versa. Another related work that uses the WSN is given in [12]. Similar works that uses PLC to remote control the terminal nodes (the lamps) are given in [1,11]. Another system for controlling the road lighting is Copyright © 2013 SciRes. IJCNS 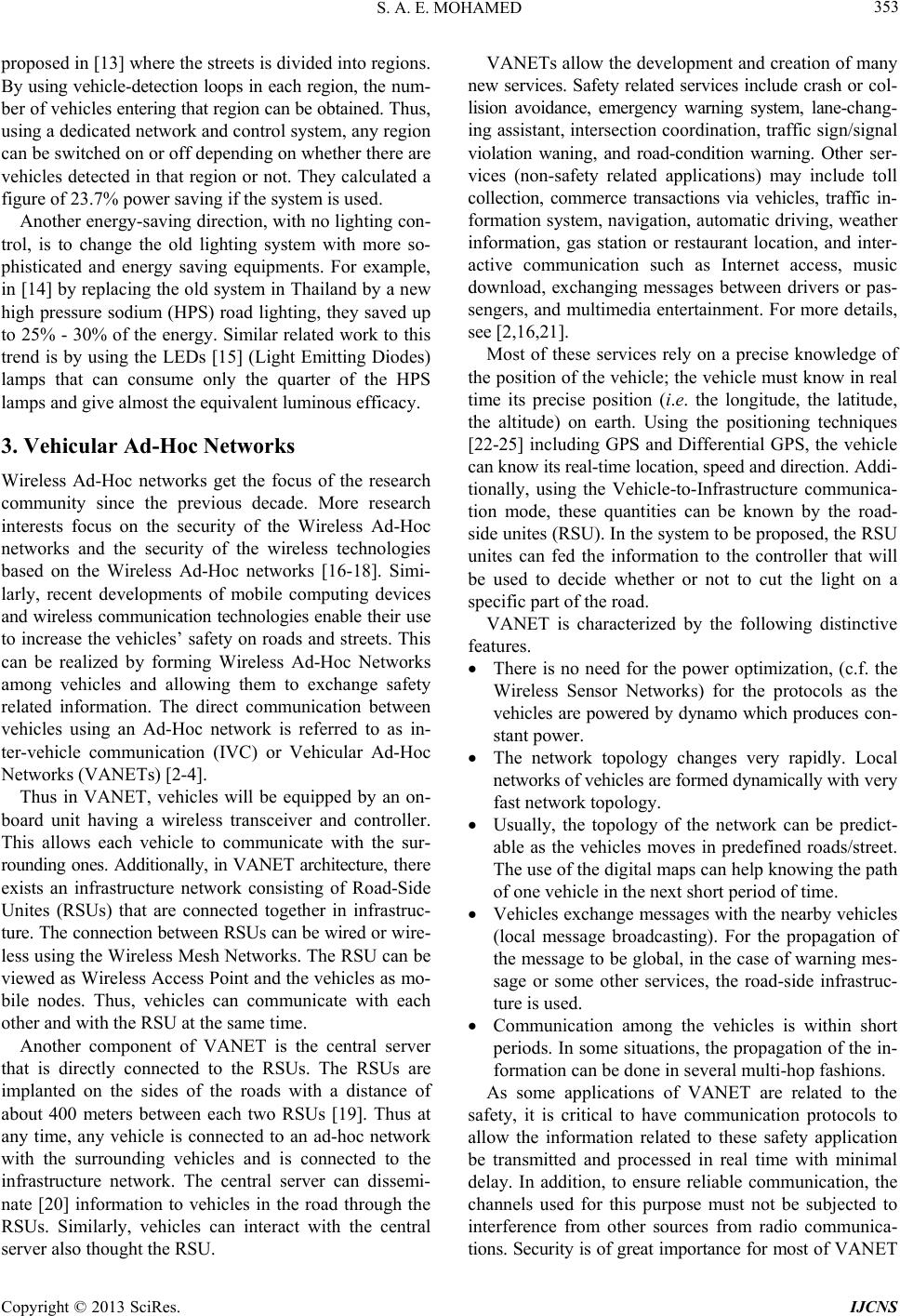 S. A. E. MOHAMED 353 proposed in [13] where the streets is divided into regions. By using vehicle-detection loops in each region, the num- ber of vehicles entering that region can be obtained. Thus, using a dedicated network and control system, any region can be switched on or off depending on whether there are vehicles detected in that region or not. They calculated a figure of 23.7% power saving if the system is used. Another energy-saving direction, with no lighting con- trol, is to change the old lighting system with more so- phisticated and energy saving equipments. For example, in [14] by replacing the old system in Thailand by a new high pressure sodium (HPS) road lighting, they saved up to 25% - 30% of the energy. Similar related work to this trend is by using the LEDs [15] (Light Emitting Diodes) lamps that can consume only the quarter of the HPS lamps and give almost the equivalent luminous efficacy. 3. Vehicular Ad-Hoc Networks Wireless Ad-Hoc networks get the focus of the research community since the previous decade. More research interests focus on the security of the Wireless Ad-Hoc networks and the security of the wireless technologies based on the Wireless Ad-Hoc networks [16-18]. Simi- larly, recent developments of mobile computing devices and wireless communication technologies enable their use to increase the vehicles’ safety on roads and streets. This can be realized by forming Wireless Ad-Hoc Networks among vehicles and allowing them to exchange safety related information. The direct communication between vehicles using an Ad-Hoc network is referred to as in- ter-vehicle communication (IVC) or Vehicular Ad-Hoc Networks (VANETs) [2-4]. Thus in VANET, vehicles will be equipped by an on- board unit having a wireless transceiver and controller. This allows each vehicle to communicate with the sur- rounding ones. Additionally, in VANET architecture, there exists an infrastructure network consisting of Road-Side Unites (RSUs) that are connected together in infrastruc- ture. The connection between RSUs can be wired or wire- less using the Wireless Mesh Networks. The RSU can be viewed as Wireless Access Point and the vehicles as mo- bile nodes. Thus, vehicles can communicate with each other and with the RSU at the same time. Another component of VANET is the central server that is directly connected to the RSUs. The RSUs are implanted on the sides of the roads with a distance of about 400 meters between each two RSUs [19]. Thus at any time, any vehicle is connected to an ad-hoc network with the surrounding vehicles and is connected to the infrastructure network. The central server can dissemi- nate [20] information to vehicles in the road through the RSUs. Similarly, vehicles can interact with the central server also thought the RSU. VANETs allow the development and creation of many new services. Safety related services include crash or col- lision avoidance, emergency warning system, lane-chang- ing assistant, intersection coordination, traffic sign/signal violation waning, and road-condition warning. Other ser- vices (non-safety related applications) may include toll collection, commerce transactions via vehicles, traffic in- formation system, navigation, automatic driving, weather information, gas station or restaurant location, and inter- active communication such as Internet access, music download, exchanging messages between drivers or pas- sengers, and multimedia entertainment. For more details, see [2,16,21]. Most of these services rely on a precise knowledge of the position of the vehicle; the vehicle must know in real time its precise position (i.e. the longitude, the latitude, the altitude) on earth. Using the positioning techniques [22-25] including GPS and Differential GPS, the vehicle can know its real-time location, speed and direction. Addi- tionally, using the Vehicle-to-Infrastructure communica- tion mode, these quantities can be known by the road- side unites (RSU). In the system to be proposed, the RSU unites can fed the information to the controller that will be used to decide whether or not to cut the light on a specific part of the road. VANET is characterized by the following distinctive features. There is no need for the power optimization, (c.f. the Wireless Sensor Networks) for the protocols as the vehicles are powered by dynamo which produces con- stant power. The network topology changes very rapidly. Local networks of vehicles are formed dynamically with very fast network topology. Usually, the topology of the network can be predict- able as the vehicles moves in predefined roads/street. The use of the digital maps can help knowing the path of one vehicle in the next short period of time. Vehicles exchange messages with the nearby vehicles (local message broadcasting). For the propagation of the message to be global, in the case of warning mes- sage or some other services, the road-side infrastruc- ture is used. Communication among the vehicles is within short periods. In some situations, the propagation of the in- formation can be done in several multi-hop fashions. As some applications of VANET are related to the safety, it is critical to have communication protocols to allow the information related to these safety application be transmitted and processed in real time with minimal delay. In addition, to ensure reliable communication, the channels used for this purpose must not be subjected to interference from other sources from radio communica- tions. Security is of great importance for most of VANET Copyright © 2013 SciRes. IJCNS  S. A. E. MOHAMED Copyright © 2013 SciRes. IJCNS 354 application. The aforementioned features of VANET have led to the proposal of the Dedicated Short Range Com- munication (DSRC) technology [19]. DSRC was adopted by ASTM and IEEE to provide a secure, reliable, and timely wireless communication component. It constitutes an integral part for the intelligent transportation system (ITS). FCC allocated the 75 MHz licensed spectrum at 5.9 GHz (5.85 - 5.925 GHz) for DSRC. The physical layer of DSRC is based on the well known IEEE 802.11a. The media access control (MAC) layer is based on the generic IEEE 802.11 distributed coordination function (DCF). DSRC is not only designed for the safety applications, but it can be used also for other commercial and non commercial non-safety applications. This is done by pro- viding separate channels for each category of the appli- cations. The whole spectrum is divided into 7 different channels with 10 MHz channel bandwidth each. Another way of incorporating the safety and the non-safety appli- cations is Time Division Multiplexing scheme (TDM). For the synchronization between the communicating units, the Universal Coordinated Time method is proposed in the IEEE communication standards in development for the DSRC. For obtaining the Universal Coordinated Time, the inclusion of a Global Positioning System (GPS) re- ceiver into each DSRC-equipped vehicle is a must. For more information about VANET, please see [2,17,18,26, 27] for more detail. 4. Architecture of the Intelligent Road Lighting Control System Using VANET infrastructure and terminology, the infra- structure of the proposal can be described as follows. The Road-Side Units (RSUs) are typically 400 meters apart [19]. The distance between any two ligh t nodes is less than 100 meters, with an average of 70 meters depending on the number of lanes in the street/road. The RSU can communicate directly and wirelessly within its range with several light nodes. In each light node (See Figure 1), a wireless transceiver is to be installed with the electronic ballast. The controller can switch the lamp on or off or dime the light if applicable. The later can be done by reducing the light intensity (control the level of energy consumption). We refer to all these equipments as Light Node (LN). The street or the road is divided into Virtual Zones (VZ). The light of each zone is controlled by the RSU. A controller in the RSU can estimate the ideal light status of its virtual zone based on the location, the presence of vehicles, the time, the weather condition, etc. It then sends wirelessly a control signal to all the light nodes in the virtual zone. This architecture represents the coarse- grained solution. However, another solution can be presented using fine-grained architecture. In the fine-grained architecture, no virtual zones are considered, but each light node will have its own controller or controlled by the RSU. Light nodes work in a chain, that means that each one commu- nicate directly with the previous and the next light nodes only or the RSU. Based on the control parameters (the presence of vehicles, the speed, the weather condition, the location), the light status of the current light nodes is determined. The RSU still play a critical role in the fine-grained architecture. The comparison between the coarse-grained and the fine-grained architectures is as follows. The fine-grained architecture can save more energy, but if it is not done wisely it can be more complex and more expensive. On the other side, the coarse-grained solution is simple, less expensive, requires minimum control signal communica- tions but not optimum in the energy saving. However, it can save much energy compared to the classical road lighting control systems. 4.1. Coarse-Grained Architecture Operation The coarse-grained architecture operation is described in this Subsection (See Figure 2). From VANET basic op- erations, the vehicles broadcast periodically its current location, direction, speed, and the acceleration or decal- eration to the surrounding vehicles. These values are also intercepted by the nearby RSU; hence it can know all this information for each vehicle in its covering area. Thus the RSU knows at any time how many vehicles in its covering area. Furthermore, the RSUs are connected in an infrastructure (wired or wirelessly using Wireless Mesh Network). Thus, they can communicate together and ex- change the mentioned information. The RSUs are also connected to a central control server that can send them Figure 1. The block diagram of the Light Node architecture. 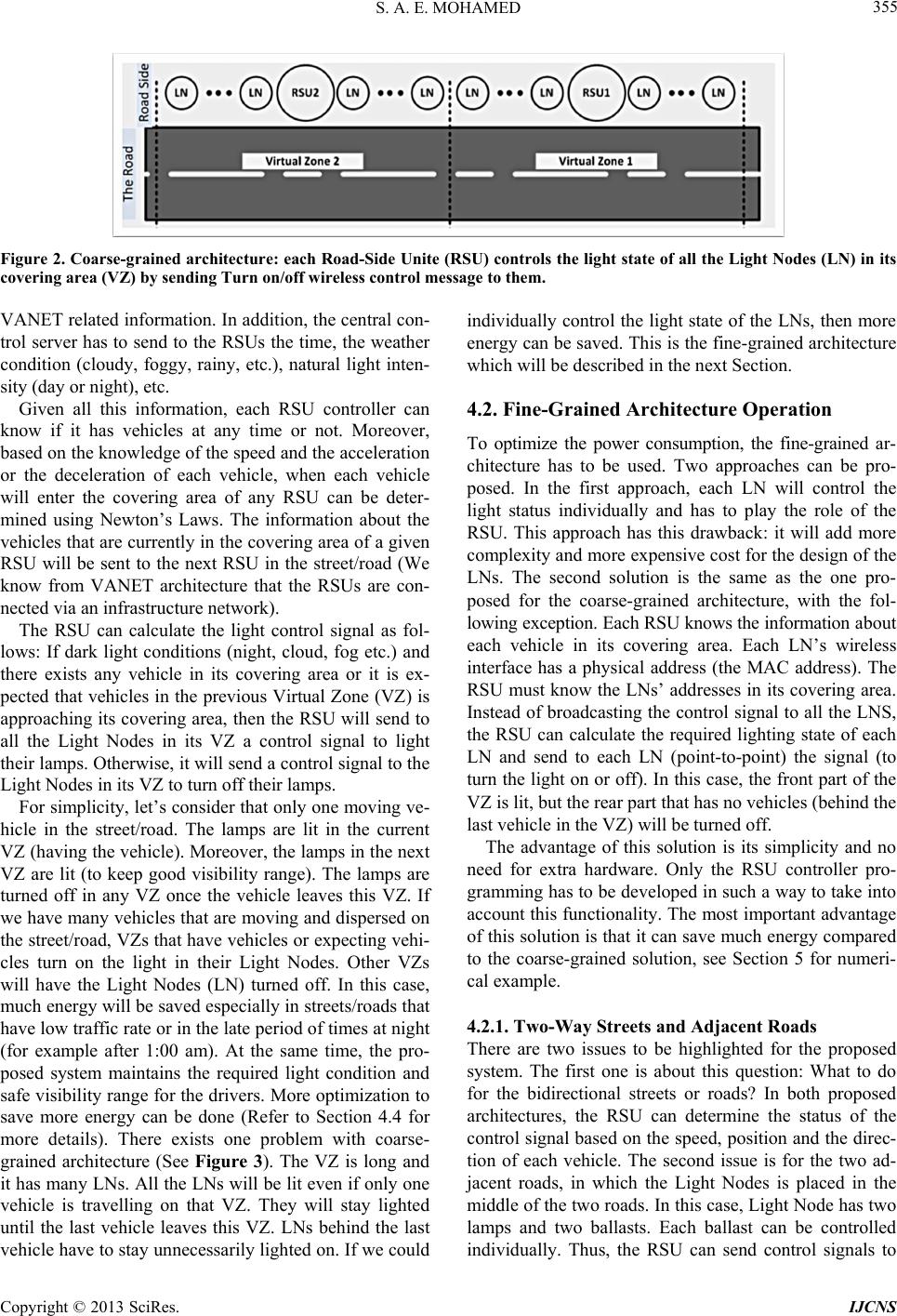 S. A. E. MOHAMED 355 Figure 2. Coarse-grained architecture: each Road-Side Unite (RSU) controls the light state of all the Light Nodes (LN) in its covering area (VZ) by sending Turn on/off wire less control message to them. VANET related information. In addition, the central con- trol server has to send to the RSUs the time, the weather condition (cloudy, foggy, rainy, etc.), natural light inten- sity (day or night), etc. Given all this information, each RSU controller can know if it has vehicles at any time or not. Moreover, based on the knowledge of the speed and the acceleration or the deceleration of each vehicle, when each vehicle will enter the covering area of any RSU can be deter- mined using Newton’s Laws. The information about the vehicles that are currently in the covering area of a given RSU will be sent to the next RSU in the street/road (We know from VANET architecture that the RSUs are con- nected via an infrastructure network). The RSU can calculate the light control signal as fol- lows: If dark light conditions (night, cloud, fog etc.) and there exists any vehicle in its covering area or it is ex- pected that vehicles in the previous Virtual Zone (VZ) is approaching its covering area, then the RSU will send to all the Light Nodes in its VZ a control signal to light their lamps. Otherwise, it will send a control signal to the Light Nodes in its VZ to turn off their lamps. For simplicity, let’s consider that only one moving ve- hicle in the street/road. The lamps are lit in the current VZ (having the vehicle). Moreover, the lamps in the next VZ are lit (to keep good visibility range). The lamps are turned off in any VZ once the vehicle leaves this VZ. If we have many vehicles that are moving and dispersed on the street/road, VZs that have vehicles or expecting vehi- cles turn on the light in their Light Nodes. Other VZs will have the Light Nodes (LN) turned off. In this case, much energy will be saved especially in streets/roads that have low traffic rate or in the late period of times at night (for example after 1:00 am). At the same time, the pro- posed system maintains the required light condition and safe visibility range for the drivers. More optimization to save more energy can be done (Refer to Section 4.4 for more details). There exists one problem with coarse- grained architecture (See Figure 3). The VZ is long and it has many LNs. All the LNs will be lit even if only one vehicle is travelling on that VZ. They will stay lighted until the last vehicle leaves this VZ. LNs behind the last vehicle have to stay unnecessarily lighted on. If we could individually control the light state of the LNs, then more energy can be saved. This is the fine-grained architecture which will be described in the next Section. 4.2. Fine-Grained Architecture Operation To optimize the power consumption, the fine-grained ar- chitecture has to be used. Two approaches can be pro- posed. In the first approach, each LN will control the light status individually and has to play the role of the RSU. This approach has this drawback: it will add more complexity and more expensive cost for the design of the LNs. The second solution is the same as the one pro- posed for the coarse-grained architecture, with the fol- lowing exception. Each RSU knows the information about each vehicle in its covering area. Each LN’s wireless interface has a physical address (the MAC address). The RSU must know the LNs’ addresses in its covering area. Instead of broadcasting the control signal to all the LNS, the RSU can calculate the required lighting state of each LN and send to each LN (point-to-point) the signal (to turn the light on or off). In this case, the front part of the VZ is lit, but the rear part that has no vehicles (behind the last vehicle in the VZ) will be turned off. The advantage of this solution is its simplicity and no need for extra hardware. Only the RSU controller pro- gramming has to be developed in such a way to take into account this functionality. The most important advantage of this solution is that it can save much energy compared to the coarse-grained solution, see Section 5 for numeri- cal example. 4.2.1. Two-Way Streets and Adjacent Roads There are two issues to be highlighted for the proposed system. The first one is about this question: What to do for the bidirectional streets or roads? In both proposed architectures, the RSU can determine the status of the control signal based on the speed, position and the direc- tion of each vehicle. The second issue is for the two ad- jacent roads, in which the Light Nodes is placed in the middle of the two roads. In this case, Light Node has two lamps and two ballasts. Each ballast can be controlled individually. Thus, the RSU can send control signals to Copyright © 2013 SciRes. IJCNS 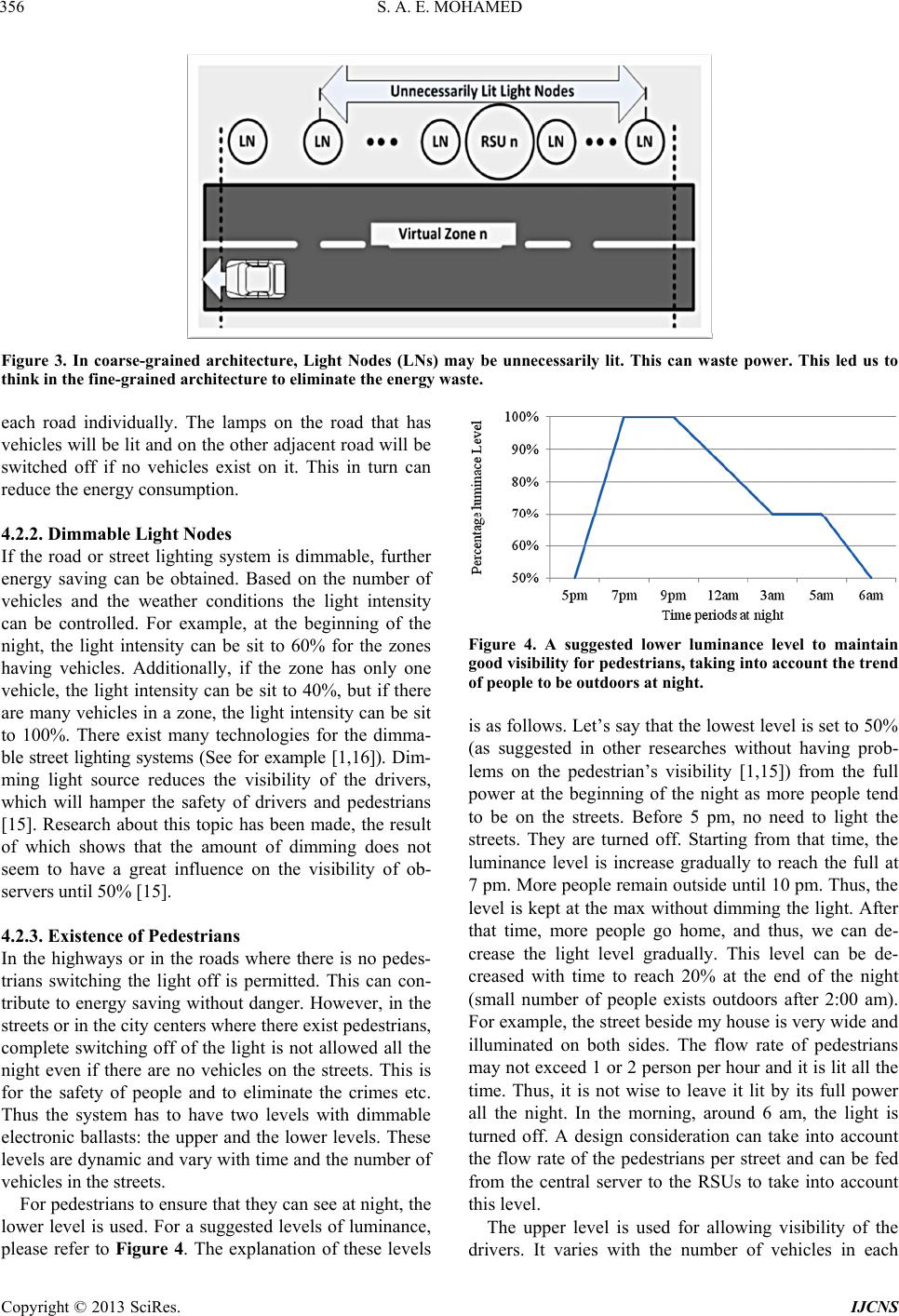 S. A. E. MOHAMED 356 Figure 3. In coarse-grained architecture, Light Nodes (LNs) may be unnecessarily lit. This can waste power. This led us to think in the fine-grained architecture to eliminate the energy waste. each road individually. The lamps on the road that has vehicles will be lit and on the other adjacent road will be switched off if no vehicles exist on it. This in turn can reduce the energy consumption. 4.2.2. Dimmable Light Nodes If the road or street lighting system is dimmable, further energy saving can be obtained. Based on the number of vehicles and the weather conditions the light intensity can be controlled. For example, at the beginning of the night, the light intensity can be sit to 60% for the zones having vehicles. Additionally, if the zone has only one vehicle, the light intensity can be sit to 40%, but if there are many vehicles in a zone, the light intensity can be sit to 100%. There exist many technologies for the dimma- ble street lighting systems (See for example [1,16]). Dim- ming light source reduces the visibility of the drivers, which will hamper the safety of drivers and pedestrians [15]. Research about this topic has been made, the result of which shows that the amount of dimming does not seem to have a great influence on the visibility of ob- servers until 50% [15]. 4.2.3. Existence of Pedestrians In the highways or in the roads where there is no pedes- trians switching the light off is permitted. This can con- tribute to energy saving without danger. However, in the streets or in the city centers where there exist pedestrians, complete switching off of the light is not allowed all the night even if there are no vehicles on the streets. This is for the safety of people and to eliminate the crimes etc. Thus the system has to have two levels with dimmable electronic ballasts: the upper and the lower levels. These levels are dynamic and vary with time and the number of vehicles in the streets. For pedestrians to ensure that they can see at night, the lower level is used. For a suggested levels of luminance, please refer to Figure 4. The explanation of these levels Figure 4. A suggested lower luminance level to maintain good visibility for pedestrians, taking into account the trend of people to be outdoors at night. is as follows. Let’s say that the lowest level is set to 50% (as suggested in other researches without having prob- lems on the pedestrian’s visibility [1,15]) from the full power at the beginning of the night as more people tend to be on the streets. Before 5 pm, no need to light the streets. They are turned off. Starting from that time, the luminance level is increase gradually to reach the full at 7 pm. More people remain outside until 10 pm. Thus, the level is kept at the max without dimming the light. After that time, more people go home, and thus, we can de- crease the light level gradually. This level can be de- creased with time to reach 20% at the end of the night (small number of people exists outdoors after 2:00 am). For example, the street beside my house is very wide and illuminated on both sides. The flow rate of pedestrians may not exceed 1 or 2 person per hour and it is lit all the time. Thus, it is not wise to leave it lit by its full power all the night. In the morning, around 6 am, the light is turned off. A design consideration can take into account the flow rate of the pedestrians per street and can be fed from the central server to the RSUs to take into account this level. The upper level is used for allowing visibility of the drivers. It varies with the number of vehicles in each Copyright © 2013 SciRes. IJCNS  S. A. E. MOHAMED 357 zone. For example, for only one vehicle, it is not wise to turn all the lights in the zones to their full power, but when there are many vehicles, the current zone has to be lit with maximum standard level of luminance. 4.2.4. Light Node Maintenance and Monitoring An important and time consuming task carried out by the traffic authorities is the maintenance and monitoring of the street lighting system. The Lamps has specific life- time and can be broken down at any time. Thus, it has to be replaced immediately to provide the required level of visibility and hence the safety. However, identifying the health status of all the Lamps in big cities containing millions of LNs dispersed on thousands of long streets and roads is a very hard and unfeasible task. In the proposed system, we can do that automatically. The controller of each LN can sense the state of the elec- tronic ballast and hence the state of the lamp (See Figure 1). Thus, if failure is detected, the controller which is already equipped by a wireless transceiver can send this information along with the location of the LN to the nearby Road-Side Unite (RSU). The RSU in turn sends the information through the VANET infrastructure to the central server. Failure can exist also in the LN controller. To be de- tected, the following simple technique is proposed. Each RSU maintain a list of the LNs in its covering area with their physical address (the MAC address). Each LN has to send an I-am-Alive signal to the RSU every one min- ute (or even 10 minutes to reduce the traffic flow). If the RSU does not hear from the LN for a specific period, it can send a Light-Node-Controller failure warning mes- sage to the monitoring server. Using specific software, the traffic authority can automatically obtain a report on the health status of all the Lamps on the street. Upon failure detection of any node, they can send technician to the specified location for replacing the Lamp. 4.2.5. Which Types of Lambs Can Be Used with This System? For the street lighting systems, there are a wide range of used technologies. These technologies are Incandescent, Halogen, Fluorescent, Compact Fluorescent (CFL), Light Emitting Diodes (LED), and Discharge. Example of the Discharge is the High-intensity discharge (HID) lamps. Please refer to the following table for a comparison be- tween the characteristics of these technologies. All the technologies except LED and Discharge have very lim- ited lamp lifetime. This limits their uses in the modern street lighting systems due to the replacement cost and the maintenance. Now comparing LED and Discharge lamps, we can see that LED has more lifetimes (around 50,000 hours). However, they have higher efficacy than LED. One major drawback that makes all the Discharge lamps not suitable for the proposed system is the start-up time. We can see that Discharge lamps can take up to 30 seconds to become full bright. LED, on the other side, has instant start-up time (around 0.01 second). Another drawback of the discharge lamps is that they are not dimmable. LED on the contrast is dimmable. Discharge lamps suffer from the flicker, but not the LED. For all these reasons, LED is the perfect choice to be used with our proposed system. Fortunately most of the street light- ing manufacturers are now recommending the use of LED and they are switching to use LED for the modern street lighting equipments. 4.2.6. Case of Emergency Regarding the emergency cases, the proposed system provides the required level of visibility to the drivers. On the highways, only vehicles are passing. The system is proposed to cut the parts of the streets that have no vehi- cles at any time. However, in the city centers, where people may exist in the city, the system does not cut the light, but dimming it to the lowest allowed range in some periods which is 50% from the full power. In the can be implemented so that the automatic control of the light be bypassed. 4.2.7. Commun ication between RSU and L ight Node s It is important to describe the communication between the RSU and the LNs. Both the RSU and the LNs. Both the RSU and the LNs are equipped by Wireless Trans- ceivers. This allows both of them to communicate wire- lessly. The communication between them can be using simple TCP protocol. The RSU is connected to about 5 LNs as stated before. It is not a problem t maintain 5 al- ways open TCP sessions between them. The reason for using TCP is for the reliability. The traffic from the RSU to the LN is very small. Just simple and small control messages between them are to be transmitted. The end- to-end delay is very small. The use of TCP produces no packet loss. The simple retransmission of TCP is suffi- cient to retransmit the dropped packets or those transmit- ted in error due to the wireless traffic. 5. Estimation of the Saved Energy and Lamp Lifetime This Section shows an estimation of the saving in the Electrical Energy if the system is used. In Section 4.2.7, we compared the different types of street lighting tech- nologies. We concluded that the best suitable one is LED. Other technologies like HID have much start-up time. During this time, the current may be 200% from the normal running current. However, the start-up time of LED lamps is only 0.01 second. Even if there may be extra start-up current, its effect on the following calcula- tion is negligible. Copyright © 2013 SciRes. IJCNS 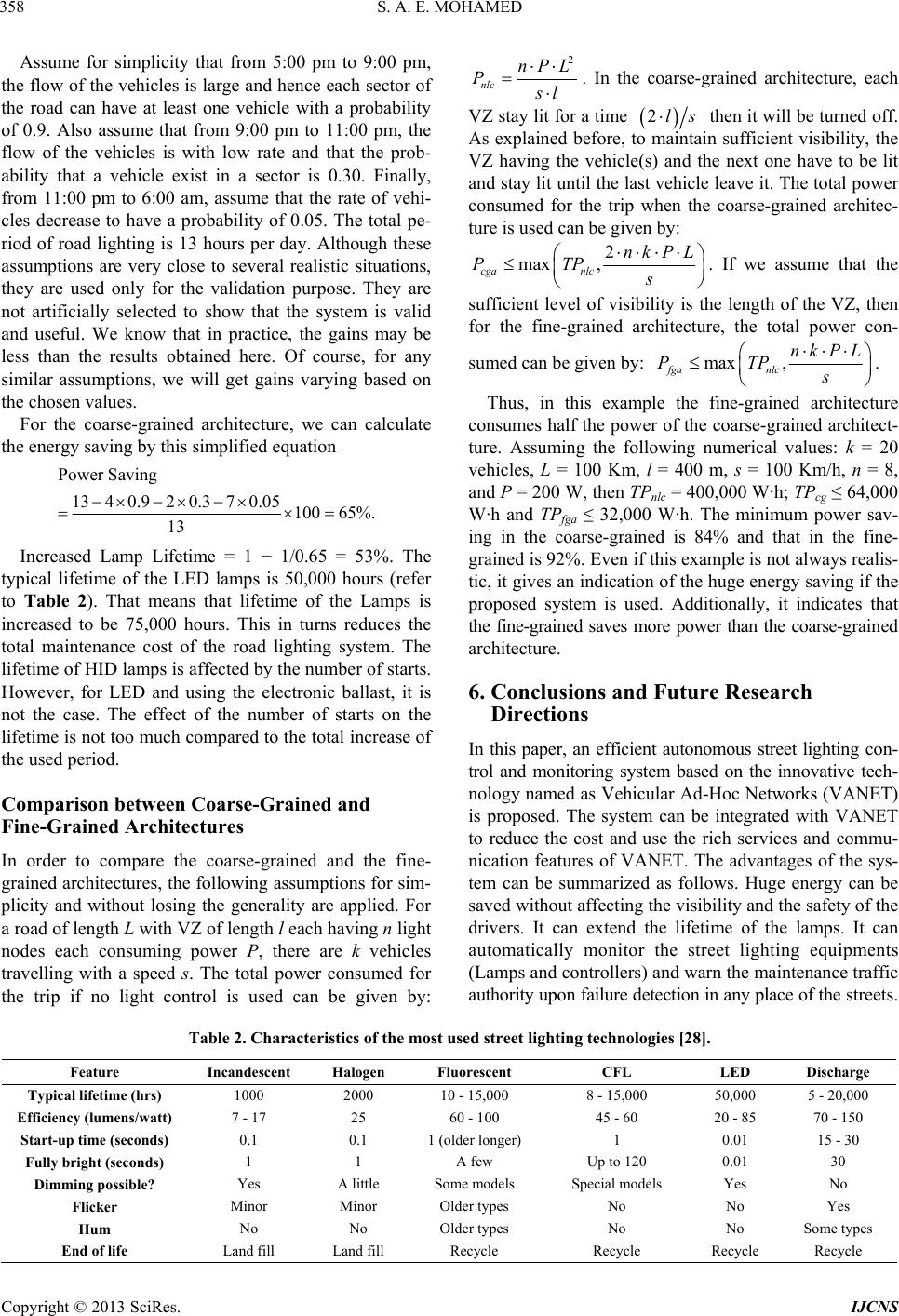 S. A. E. MOHAMED Copyright © 2013 SciRes. IJCNS 358 Assume for simplicity that from 5:00 pm to 9:00 pm, the flow of the vehicles is large and hence each sector of the road can have at least one vehicle with a probability of 0.9. Also assume that from 9:00 pm to 11:00 pm, the flow of the vehicles is with low rate and that the prob- ability that a vehicle exist in a sector is 0.30. Finally, from 11:00 pm to 6:00 am, assume that the rate of vehi- cles decrease to have a probability of 0.05. The total pe- riod of road lighting is 13 hours per day. Although these assumptions are very close to several realistic situations, they are used only for the validation purpose. They are not artificially selected to show that the system is valid and useful. We know that in practice, the gains may be less than the results obtained here. Of course, for any similar assumptions, we will get gains varying based on the chosen values. 2 nlc nPL P l . In the coarse-grained architecture, each VZ stay lit for a time 2ls then it will be turned off. As explained before, to maintain sufficient visibility, the VZ having the vehicle(s) and the next one have to be lit and stay lit until the last vehicle leave it. The total power consumed for the trip when the coarse-grained architec- ture is used can be given by: 2 max , cganlc nkPL PTP s . If we assume that the sufficient level of visibility is the length of the VZ, then for the fine-grained architecture, the total power con- sumed can be given by: max , fganlc nkPL PTP s . For the coarse-grained architecture, we can calculate the energy saving by this simplified equation Power Saving 1340.920.370.05100 65%. 13 Thus, in this example the fine-grained architecture consumes half the power of the coarse-grained architect- ture. Assuming the following numerical values: k = 20 vehicles, L = 100 Km, l = 400 m, s = 100 Km/h, n = 8, and P = 200 W, then TPnlc = 400,000 W·h; TPcg ≤ 64,000 W·h and TPfga ≤ 32,000 W·h. The minimum power sav- ing in the coarse-grained is 84% and that in the fine- grained is 92%. Even if this example is not always realis- tic, it gives an indication of the huge energy saving if the proposed system is used. Additionally, it indicates that the fine-grained saves more power than the coarse-grained architecture. Increased Lamp Lifetime = 1 − 1/0.65 = 53%. The typical lifetime of the LED lamps is 50,000 hours (refer to Table 2). That means that lifetime of the Lamps is increased to be 75,000 hours. This in turns reduces the total maintenance cost of the road lighting system. The lifetime of HID lamps is affected by the number of starts. However, for LED and using the electronic ballast, it is not the case. The effect of the number of starts on the lifetime is not too much compared to the total increase of the used period. 6. Conclusions and Future Research Directions In this paper, an efficient autonomous street lighting con- trol and monitoring system based on the innovative tech- nology named as Vehicular Ad-Hoc Networks (VANET) is proposed. The system can be integrated with VANET to reduce the cost and use the rich services and commu- nication features of VANET. The advantages of the sys- tem can be summarized as follows. Huge energy can be saved without affecting the visibility and the safety of the drivers. It can extend the lifetime of the lamps. It can automatically monitor the street lighting equipments (Lamps and controllers) and warn the maintenance traffic authority upon failure detection in any place of the streets. Comparison between Coarse-Grained and Fine-Grained Architectures In order to compare the coarse-grained and the fine- grained architectures, the following assumptions for sim- plicity and without losing the generality are applied. For a road of length L with VZ of length l each having n light nodes each consuming power P, there are k vehicles travelling with a speed s. The total power consumed for the trip if no light control is used can be given by: Table 2. Characteristics of the most used street lighting technologies [28]. Feature Incandescent Halogen Fluorescent CFL LED Discharge Typical lifetime (hrs) 1000 2000 10 - 15,000 8 - 15,000 50,000 5 - 20,000 Efficiency (lumens/w a tt) 7 - 17 25 60 - 100 45 - 60 20 - 85 70 - 150 Start-up time (seconds) 0.1 0.1 1 (older longer) 1 0.01 15 - 30 Fully bright (seconds) 1 1 A few Up to 120 0.01 30 Dimming possible? Yes A little Some models Special models Yes No Flicker Minor Minor Older types No No Yes Hum No No Older types No No Some types End of life Land fill Land fill Recycle Recycle Recycle Recycle  S. A. E. MOHAMED 359 Two alternatives are proposed: one suitable to highways where no pedestrians exist and the other one for the loca- tions where there exist pedestrians. Two different archi- tectures for the proposed system are presented and evalu- ated: the coarse-grained and the fine-grained. Other re- lated works are using static methods for reducing the consumed power energy. They propose the replacement of the existing lamps by other types that consumes less. Another trend is to use dimmable lamps. Research extension to this work may include consid- ering the security issues and the possible attacks to the system. The security measures have to be considered. All the wireless communications have to be secured. Other- wise, many attacks can be launched against the system to compromise its functions. For example, a rubber can attack the system switching off all the lamps in a city center to attack a bank or cause violence. Thus, all the wireless communications and the control signals have to be secured and authenticated. Another trend is to propose the hardware and software design for the controllers. 7. Acknowledgements The author would like to acknowledge the Scientific Re- search Deanship, Qassim University for supporting this research paper. REFERENCES [1] S. K. Cho and V. Dhingra, “Street Lighting Control Bas- ed on LonWorks Power Line Communication,” IEEE In- ternational Symposium on Power Line Communications and Its Applications, Jeju City, 2-4 April 2008, pp. 396- 398. [2] J. J. Blum, A. Eskandarian and L. J. Hoffman, “Chal- lenges of Inter-Vehicle AD-Hoc Networks,” IEEE Trans- actions on Intelligent Transportation Systems, Vol. 5, No. 4, 2004, pp. 347-351. doi:10.1109/TITS.2004.838218 [3] H. Hartenstein and K. P. Laberteaux, “A Tutorial Survey on Vehicular Ad-Hoc Networks,” IEEE Communications Magazine, Vol. 46, No. 6, 2008, pp. 164-171. doi:10.1109/MCOM.2008.4539481 [4] H. Fussler, S. Schnaufer, M. Transier and W. Effelsberg, “Vehicular Ad-Hoc Networks: From Vision to Reality and Back,” 4th Annual Conference on Wireless on De- mand Network Systems and Services, Oberguyrgl, 24-26 January 2007, pp. 80-83. doi:10.1109/WONS.2007.340477 [5] L. Li, X. M. Chu, Y. Wu and Q. Wu, “The Development of Road Lighting Intelligent Control System Based on Wireless Network Control,” Proceedings of International Conference on Electronic Computer Technology, Macau, 20-22 February 2009, pp. 353-357. [6] Y. Wu, X. M. Chu, Q. Wu and L. Li, “The Road Lighting Control Technology Research Base on Ubiquitous Net- work,” Proceedings of the 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, 24-26 September 2009, pp. 1-4. [7] J. D. Lee, K. Y. Nam, S. H. Jeong, S. B. Choi, H. S. Ryoo and D. Kim, “Development of Zigbee Based Street Light Control System,” Power Systems Conference and Exposi- tion, Atlanta, 29 October-1 November 2006, pp. 2236- 2240. [8] Y. Wu, C. H. Shi, X. H. Zhang and W. Yang, “Design of New Intelligent Street Light Control System,” 8th IEEE International Conference on Control and Automation (ICCA), Xiamen, 9-11 June 2010, pp. 1423-1427. [9] C. G. Jing, L. C. Ren and D. Y. Gu, “Geographical Rout- ing for WSN of Street Lighting Monitoring and Control System,” International Conference on Computer Design and Applications (ICCDA), Vol. 3, 2010, pp. 235-238. [10] E. H. T. Ei-Shirbeeny and M. E. Bakka, “Experimental Pilot Project for Automating Street Lighting System in Abu Dhabi Using Power Line Communications,” Procee- dings of the 10th IEEE International Conference on Elec- tronics, Circuits and Systems, Vol. 2, 2003, pp. 743-746. [11] A. del Rio Vazquez, J. Doval-Gandoy, S. Perez Perez and J. Dios Vidal, “Characterization of a Street Lighting Po- wer Line When Used as a Communications Channel in the 115 kHz Band,” IEEE International Symposium on Industrial Electronics, Vigo, 4-6 June 2007, pp. 3062- 3065. [12] M. Mendalka, M. Gadaj, L. Kulas and K. Nyka, “WSN for Intelligent Street Lighting System,” 2nd International Conference on Information Technology (ICIT), Gdansk, 28-30 June 2010, pp. 99-100. [13] C. Y. Liu, Q. G. Wang and F. Y. Zhang, “Design and Development of City Street-Lighting Energy-Saving Sys- tem,” 2nd Pacific-Asia Conference on Circuits, Commu- nications and System (PACCS), Vol. 1, 2010, pp. 178- 182. [14] K. Hyodhyad and P. Srikaew, “Result of Road Lighting Energy Saving Project Implementation through the Use of Public Private Partnership Scheme,” Proceedings of the International Conference on Energy and Sustainable De- velopment: Issues and Strategies (ESD), Chiang Mai, 2-4 June 2010, pp. 1-4. [15] F. S. Li, D. H. Chen, X. J. Song and Y. M. Chen, “LEDs: A Promising Energy-Saving Light Source for Road Light- ing,” Asia-Pacific Power and Energy Engineering Con- ference, Wuhan, 27-31 March 2009, pp. 1-3. doi:10.1109/APPEEC.2009.4918201 [16] H. S. H. Chung, N. M. Ho, S. Y. R. Hui and W. Z. Mai, “Case Study of a Highly-Reliable Dimmable Road Light- ing System with Intelligent Remote Control,” Proceed- ings of European Conference on Power Electronics and Applications, Dresden, 12-14 September 2005, pp. 1-10. [17] H. Yang, F. Ricciato, S. Lu and L. Zhang, “Securing a Wireless World,” Proceedings of the IEEE, Vol. 94, No. 2, 2006, pp. 442-454. doi:10.1109/JPROC.2005.862321 [18] D. Djenouri, L. Khelladi and A. N. Badache, “A Survey of Security Issues in Mobile Ad-Hoc and Sensor Net- works,” IEEE Communications Surveys & Tutorials, Vol. 7, No. 4, 2005, pp. 2-28. doi:10.1109/COMST.2005.1593277 Copyright © 2013 SciRes. IJCNS  S. A. E. MOHAMED 360 [19] J. Jakubiak and Y.Koucheryavy, “State of the Art and Research Challenges for VANETs,” 5th IEEE Consumer Communications and Networking Conference, Las Vegas, 10-12 January 2008, pp. 912-916. [20] L. Wischof, A. Ebner and H. Rohling, “Information Dis- semination in Self-Organizing Intervehicle Networks,” IEEE Transactions on Intelligent Transportation Systems, Vol. 6, No. 1, 2005, pp. 90-101. doi:10.1109/TITS.2004.842407 [21] S. Kato, S. Tsugawa, K. Tokuda, T. Matsui and H. Fujii, “Vehicle Control Algorithms for Cooperative Driving with Automated Vehicles and Intervehicle Communica- tions,” IEEE Transactions on Intelligent Transportation Systems, Vol. 3, No. 3, 2002, pp. 155-161. doi:10.1109/TITS.2002.802929 [22] C. Komar and C. Ersoy, “Location Tracking and Location Based Service Using IEEE 802.11 WLAN Infrastruc- ture,” Proceedings of the European Wireless Workshop, Barcelona, February 2004, pp. 24-27. [23] R. Singh, M. Guainazzo and C. S. Regazzoni, “Location Determination Using WLAN in Conjunction with GPS Network,” Proceedings of the Vehicular Technology Con- ference (VTC-Spring), Vol. 5, 2004, pp. 2695-2699. [24] J. Hightower and G. Borriello, “Location Systems for Ubiquitous Computing,” IEEE Computer Society Press, Vol. 34, No. 8, 2001, pp. 57-66. doi:10.1109/2.940014 [25] M. Porretta, P. Nepa, G. Manara and F. Gianne, “Loca- tion, Location, Location,” IEEE Vehicular Technology Magazine, Vol. 3, No. 2, 2008, pp. 20-29. doi:10.1109/MVT.2008.923969 [26] D. Faria and D. Cheriton, “Detecting Identity-Based At- tacks in Wireless Networks Using Signalprints,” Pro- ceedings of the ACM Workshop on Wireless Security (WiSe), Los Angeles, 29 September 2006, pp. 43-52. [27] Q. Li and W. Trappe, “Relationship-Based Detection of Spoofing-Related Anomalous Traffic in Ad-Hoc Net- works,” Proceedings of the 3rd Annual IEEE Communi- cations Society Conference on Sensor, Mesh and Ad-Hoc Communications and Networks (SECON), Reston, 28 September 2006, pp. 50-59. [28] Blewbury Energy Initiative, 2012. http://www.blewbury.co.uk/energy/lighting.htm Copyright © 2013 SciRes. IJCNS
|