International Journal of Clean Coal and Energy, 2013, 2, 16-20
doi:10.4236/ijcce.2013.22B004 Published Online May 2013 (http://www.scirp.org/journal/ijcce)
A Sun Tracking System Design for a Large Dish
Solar Concentrator
Xiaoshan Jin1*, Guoqiang Xu1, Rongjiu Zhou2, Xiang Luo1, Yongkai Quan1
1School of Energy & Power Engineering, Beihang University, Beijing, China
2Shouhang Resource Saving Company Limited, Beijing, China
Email: xiaoshan_jin@163.com, guoqiang_xu@buaa.edu.cn, 442759218@qq.com,
xiang.luo@buaa.edu.cn, quanyongkai@126.com
Received 2013
ABSTRACT
Energy crisis promotes the development of renewable energy, especially the solar energy. Sun tracking system proposed
in this paper is such a device for efficiency improvement. This closed loop tracking system with two axis sun tracking
method is controlled by a programmable logic controller (PLC) and is used for a large dish solar collector. A
combination tracking mode combined active and passive tracking methods used in the design make the tracker efficient
whatever the circumstances. Two stepper motors and two reduction boxes move the device towards the sun with chain
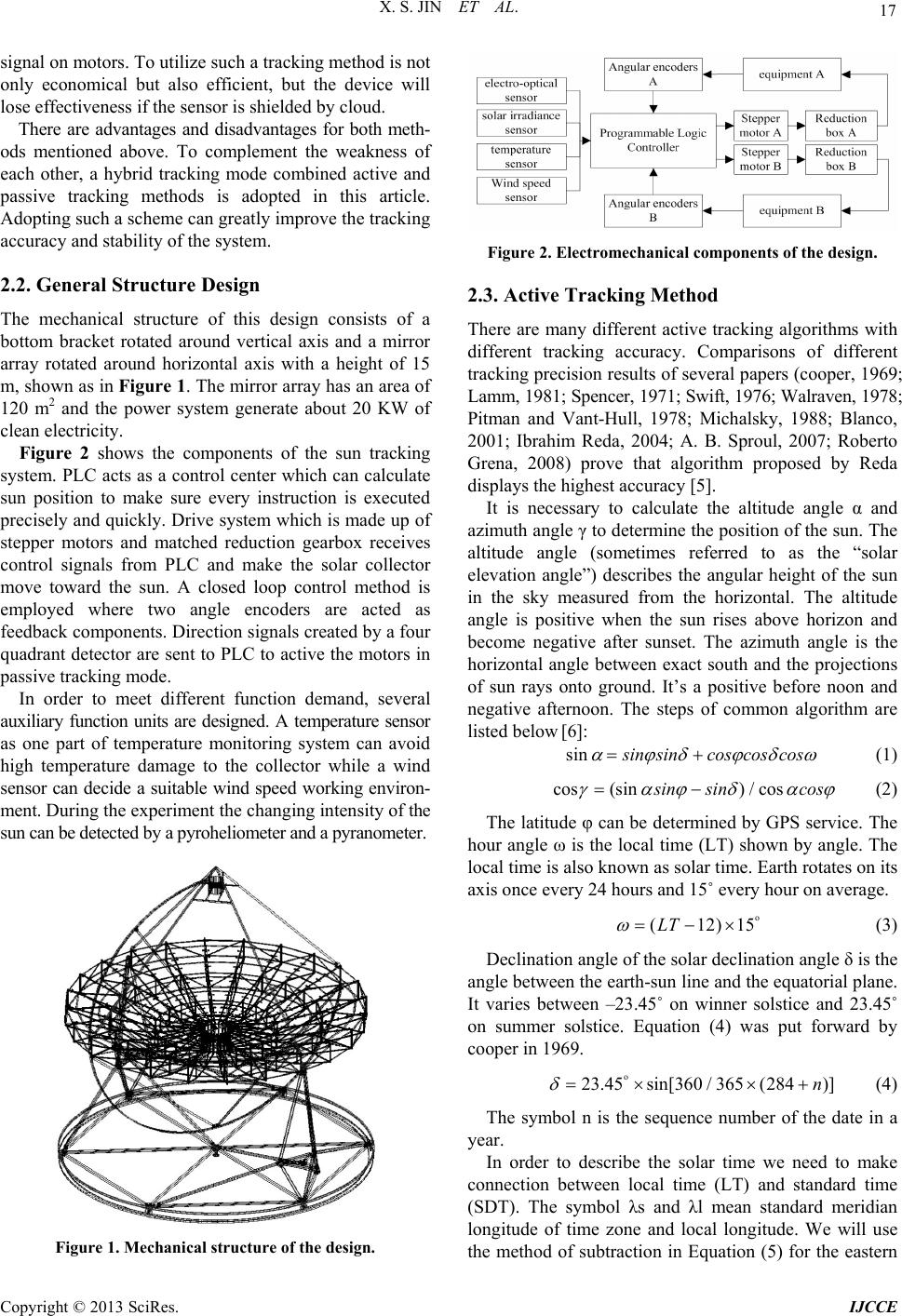
transmission. Besides sun tracking, the system also has functions of overheat monitoring, wind speed monitoring and
measurement of illumination.
Keywords: Renewable Energy; Solar Energy; Sun tracking; PLC; Combination Tracking Mode
1. Introduction
International energy structure adjustment and the energy
crisis promote the development of renewable energy.
Solar energy has gained much more focus because of its
endless and eco-friendly features. In 2012, the
International Energy Agency(IEA) point out in its report
“World energy outlook 2012” [1] that renewable energy
has become an integral part of the global energy structure
and it will be the world’s second largest power source in
2015. In 2035, power generation of renewable energy
will account for about one-third of electricity output, and
the solar energy will be the fastest one among it.
Solar thermal power generation is one of the main
ways of solar energy utilization which has been widely
used throughout the world. The dish solar thermal power
generation usually uses a two axis sun tracker having
high tracking accuracy and thermoelectric conversion
efficiency. Thermal solar tracking needs higher tracking
precision compared with photovoltaic. Through
simulation of light incidence by TRACEPRO software,
the collector will lose half of total energy in 1.25° light
deflection and will lose all energy in 1.5° deflection.
While the value is 0.35°, the light loss less than 5%.
Photovoltaic tracking losses only 1.5% in 10°deviation
of light.
This paper introduces a solar tracking system which
controlled by the programmable logic controller (PLC) to
improve solar energy efficiency. Active and passive
tracking control methods with a closed loop system could
accommodate different weather conditions. Two stepper
motors and two reduction boxes are used to control the
rotation of the collector with chain transmission. The
goal in this system is to achieve a tracking precision
within 0.1°. In this case, the light energy loss would be
negligible.
2. Sun Tracking System Design
2.1. Tracking Mode Selection
There is different automatic sun tracking methods
according to different solar concentrator. These methods
are usually sorted into three categories: active tracking
methods, passive tracking method and combination of
both[2-4].
Active tracking method can calculate the altitude angle
and azimuth of the sun by preset program in PLC. The
system can determine the position of the sun as long as
the latitude-longitude and date-time information has been
input. The upside to this method is that the system can’t
be affected by outside factors such as cloud and dust. The
downside is that this mode has a low tracking precision
while it has a high cost. So it is difficult to design such a
structure at the same time.
Passive tracking method is based on electoral-optical
sensors which can indicate the deflection of light.
Imbalance light make these sensors product control
Copyright © 2013 SciRes. IJCCE