A. KONYUKHOV, K. SCHWEIZERHOF 17
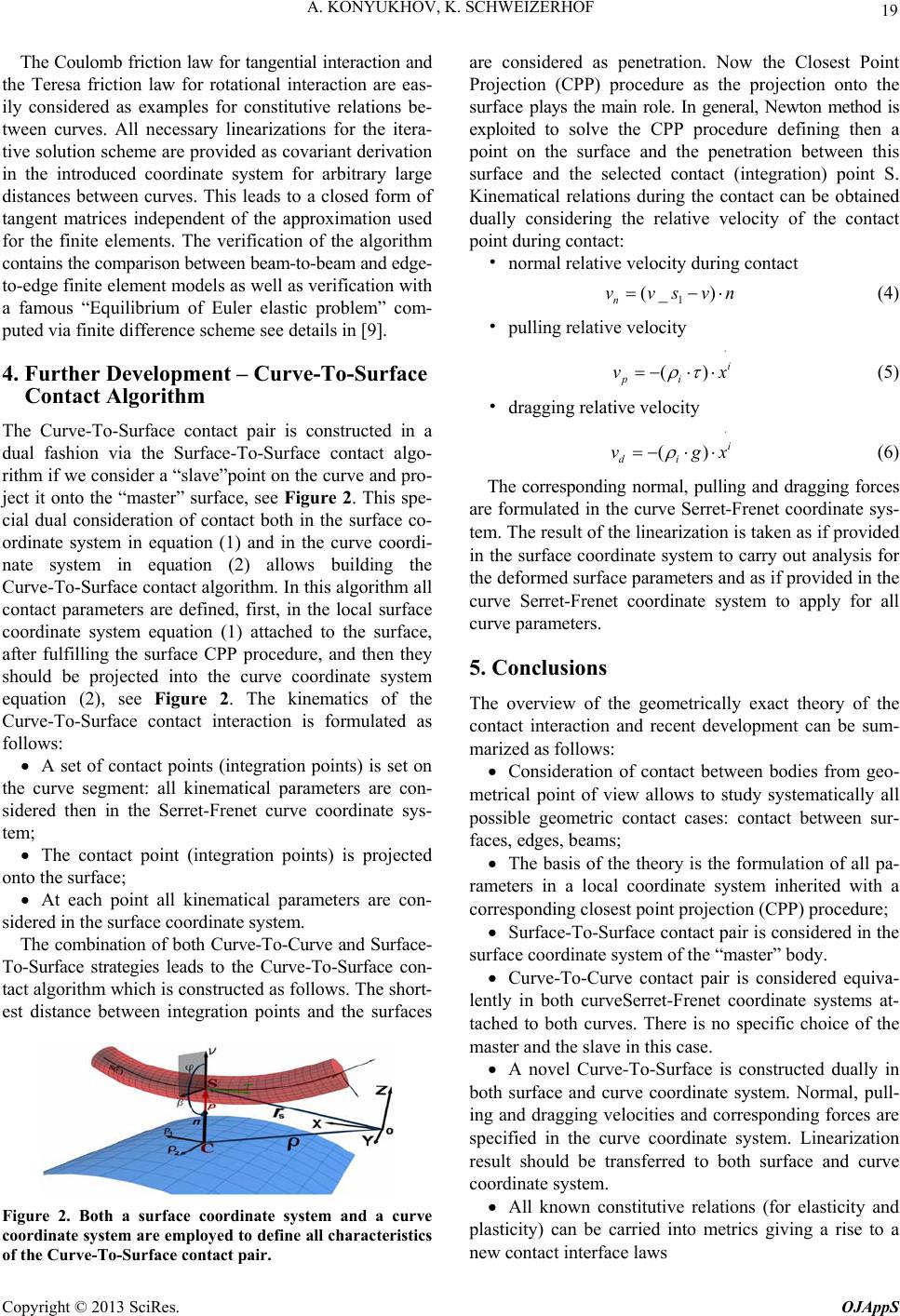
3.1. Construction of Kinematics and Numerical
Algorithms for Various Contact Pairs
geom
riant form for various geo-
) procedures. Thus, fundamental
ection routines leads to “projection do-
conditions:
r independent of approxima-
ariant form for arbitrary
set of relative motions
h many publications, they can be sum-
m
nding to a
ce
n “master-slave” contact al-
go
The following open problems are stated as goals for the
etrically exact theory
Development of the unified geometrical formulation
of contact conditions in cova
metrical situations of contacting bodies leading to contact
pairs: surface-to-surface, curve-to-surface, point-
to-surface, curve-to-curve, point-to-curve, point-to-point
(joint). The description will be fully based on the differ-
ential geometry of specific features forming a continuum,
because it is carried out in the local coordinate systems
attached to this feature: this is the Gaussian surface coor-
dinate system in the case of surface; the Serret-Frenet
basis in the case of a curved line; the coordinate system
standard for rigid body rotation problem (e.g. via the
Euler angles) the case of a point in. This general de-
scription is forming a geometrically exact theory for
contact interaction.
A full set of contact pairs requires various closest
point projection (CPP
problems of existence and uniqueness of closest point
projection routines corresponding to the following situa-
tions are investigated: point-to-surface, point-to-line,
line- to-line.
A solution of existence and uniqueness problems of
closest point proj
mains” as the “maximal searching domains“.
Derivation of a unified covariant description of
various applicable methods to enforce contact
Lagrange multipliers methods, penalty methods, aug-
mented Lagrange multipliers method. Consistent tangent
matrices are given in closed covariant form possessing a
clear geometrical structure.
Description of all geometrical situations in a co-
variant form which is a-prio
tions of these geometrical features leads to straightfor-
ward numerical algorithms for the implementation with
any order of approximation for finite elements including
iso-geometric finite elements.
Generalization of classical Coulomb law into a
complex interface laws in cov
geometry of the surfaces (e.g. coupled anisotropic fric-
tion and adhesion for surfaces).
Development of the curve-to-curve contact model
allowing considering the co mplete
between curves including a rotational interaction (this is
a novel in the current theory and has not been possible in
earlier theories).
Though, the specific points of the proposed theory are
developed throug
arized under the unified aim, see more detail in mono-
graph [10]. In order to construct a numerical algorithm
for a certain contact pair, first of all, it is identified that
the closest distance between contacting bodies is a natu-
ral measure of the contact interaction. The procedure is
introduced via the closest point projection procedure
(CPP), solution of which requires the differentiability of
the function represen ting the parameterization of the sur-
face of the contacting body. Analysis of the solvability
for the CPP procedure, see more in [8], allows then to
classify all types of all possible contact pairs discussed
earlier. Starting with a consideration of C2-continuous
surfaces, the concept of the projection domain is intro-
duced as a domain from which any potential contact
point can be uniquely projected, and therefore, the nu-
merical contact algorithm can be further constructed.
This domain can be constructed for utmostC1-continuous
surfaces. If the surfaces contain edges and vertex then the
CPP procedure should be generalized in order to include
the projection onto edges and onto vertexes.
The main idea for application for the contact is then
straightforward – the CPPprocedure correspo
rtain geometrical feature gives a rise to a special, in
general, curvilinear 3D coordinate system. This coordi-
nate system is attached to a geometrical feature and its
convective coordinates are directly used for further defi-
nition of the contact measures. Thus, all contact pairs
listed earlier should be described in the corresponding
local coordinate system. The requirement of the exis-
tence for the generalized CPP procedure leads to the
transformation rule between types of contact pairs ac-
cording to which the corresponding coordinate system is
taken. Thus, the all contact pairs can be uniquely de-
scribed in most situations.
A surface-to-surface contact pair, see Figure 1, is de-
scribed via the well know
rithm based on the CPP procedure onto the surface.
This projection allows defining a coordinate system as
follows:
12123 12
,, ,rx xx xxnxx
(1)
12
,rx x
Vector is a vector for the “slave” point,
12
,
x
is a parameterization of the “master” surface,
nx x
12
, is a normal vector to the surface. Equation (1)
in fact, a coordinate transformation in which
e coordinates 123
,,
describes,
convectiv
xx
are used for measure
of contact interaction: the first two 12
,
x are meas-
ures for the tangent internd the third coordinate
3action a
is a penetration – the measure of normal
on-penetrability condition. This transformation is valid
lied only if the solution of the corresponding surface
CPP procedure exists. Initially, the computational algo-
rithm is constructed for non-frictional contact interaction
of smooth surfaces. Here the description starts in the co-
ordinate system given in equation (1), however, due to
the small penetration it is mostly falling into the descrip-
app
Copyright © 2013 SciRes. OJAppS