Paper Menu >>
Journal Menu >>
 Communications and Network, 2010, 2, 216-220 doi:10.4236/cn.2010.24031 Published Online November 2010 (http://www.SciRP.org/journal/cn) Copyright © 2010 SciRes. CN Locating Mobile Users Using Base Stations of Cellular Networks Ilya M. Averin, Victor T. Ermolayev, Alexander G. Flaksman Wireless Technologies Department, Mera NN, Russia E-mail: ilya.averin@gmail.com, {ave, ermol, flak}@mera.ru Received July 14, 201 0; revised August 31, 2010; accepted September 29, 2010 Abstract The location of mobile users served by cellular networks is considered. The chosen approach assumes that location is estimated through angular triangulation with three base stations (BSs). New estimates are pro- posed, which are described by closed-form expressions, and are alternatives to the maximum likelihood es- timate. It is shown that the accuracy of the estimate coin ciding with incircle center of the bearing triangle is close to the accuracy of the maximum likelihood estimate. Keywords: Position Location, Location-based Services, Cellular Networks 1. Introduction There is significant interest in location technologies in wireless networks. Information about the user position can be used for the development of location-based ser- vices [1] or for enhancing security [2]. The specifications of next generation cellular networks (LTE, WiMax) as- sume widespread implementation of spatial signal proc- essing. This means that most BSs will be equipped with multiple antennas. Therefore, location techniques based on angular triangulation [3,4] are of interest for advanced wireless networks. In [5], the angular triangulation ap- proach applied to wireless networks is considered. It is shown that the corresponding location accuracy satisfies existing requirements [2]. However, only the somewhat complex maximum likelihood algorithm is presented there. This paper proposes a positioning algorithm with low computational complexity and gives some estimates of its accuracy. The basic idea of the approach is to define a bearing triangle using the bearings of a mobile user measured at three BSs and then to try orthocenter, incir- cle center and centroid of this triangle as the candidate points of mobile user position. The rest of the paper is organized as follows: the de- scription of the proposed algorithm is given in Section 2, Section 3 discusses the simulation results and Conclu- sions are listed in Section 4. 2. Positioning by Means of Angular Triangulation Figure 1 shows the geometry of angular triangulation with 3 BSs involved. The mobile is situated at the point 00 , x y. True bearings referenced to the BSs are 123 ,, . The same figure depicts the situation when not true but the measured 1 , 2 and 3 bearings are known. Due to finite accuracy of direction finding, more than one cross point exists now and the intersections of bearing lines cause the appearance of bearing triangle abc. This, in turn, makes the finding of the optimal es- timate of the mobile’s position non-triv ial. The bearing estimates can be introduced as independ- ent Gaussian random values centered, of course, on the true bearings [6]. Therefore, the likelihood function with respect to the unknown exact angular directions 123 ,, is written as 2 3 123 32 1 1 1 ,,exp 2 22 ii ii i i P (1) where i is the standard deviation of the bearing error measured at the BSi. In order to derive the maximum likelihood estimate of mobile user position , one should find the poin t where the ikelihood function (1) reaches its extremum given three l 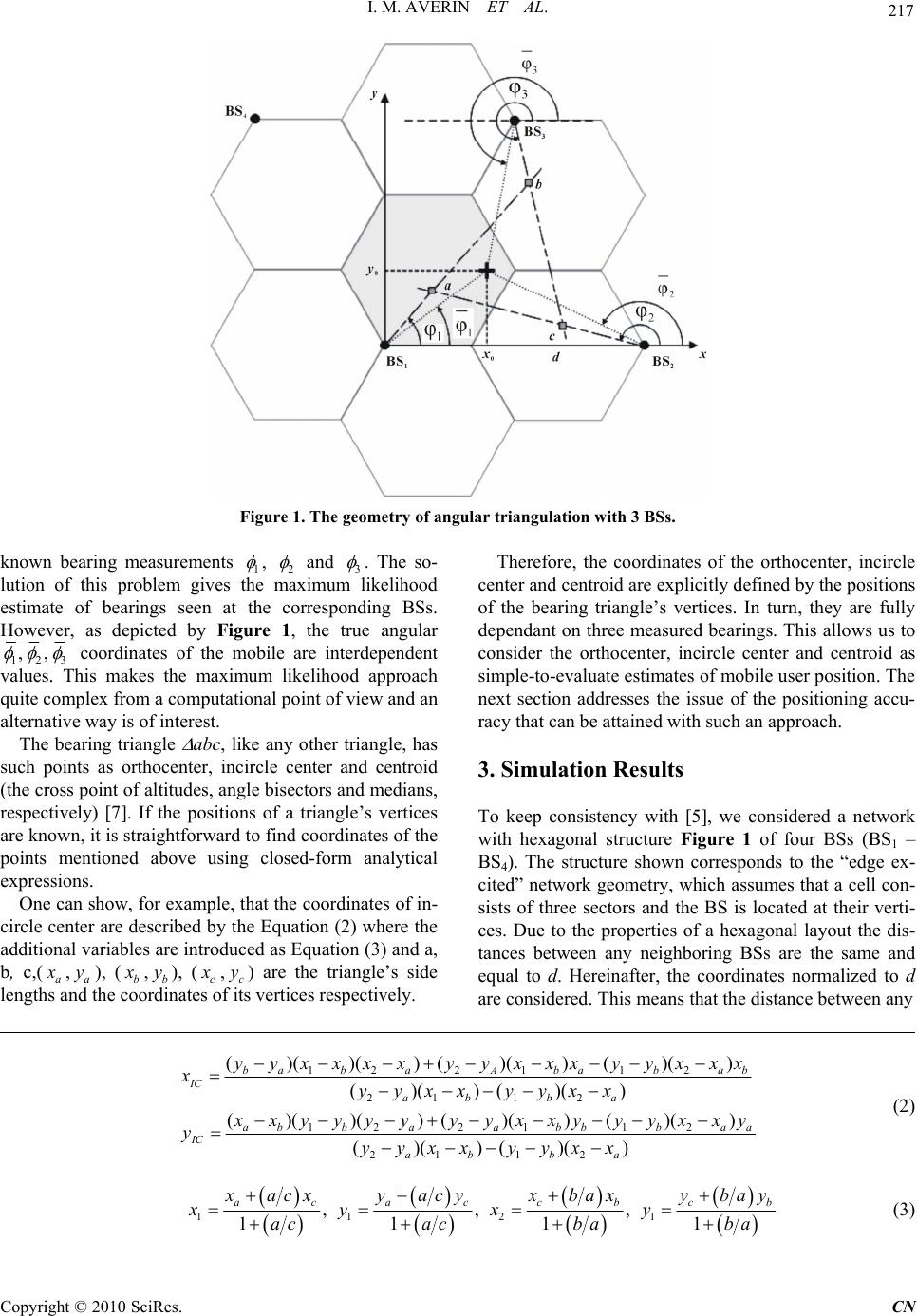 I. M. AVERIN ET AL. Copyright © 2010 SciRes. CN 217 Figure 1. The geometry of angular triangulation with 3 BSs. known bearing measurements 1 , 2 and 3 . The so- lution of this problem gives the maximum likelihood estimate of bearings seen at the corresponding BSs. However, as depicted by Figure 1, the true angular 123 ,, coordinates of the mobile are interdependent values. This makes the maximum likelihood approach quite complex from a computational point of view and an alternative way is of interest. The bearing triangle abc, like any other triangle, has such points as orthocenter, incircle center and centroid (the cross point of altitudes, ang le bisectors and medians, respectively) [7]. If the positions of a triangle’s vertices are known, it is straightfo rward to find coo rdinates of the points mentioned above using closed-form analytical expressions. One can show, for example, that the coordinates of in- circle center are described by the Equation (2) where the additional variables are introduced as Equation (3) and a, b, c,(a x ,a), (b y x ,b), (c y x ,c) are the triangle’s side lengths and the coordinates of its vertices respectively. y Therefore, the coordinates of the orthocenter, incircle center and centroid are explicitly defined by the positions of the bearing triangle’s vertices. In turn, they are fully dependant on three measured bearings. This allows us to consider the orthocenter, incircle center and centroid as simple-to-evaluate estimates o f mobile user pos ition. The next section addresses the issue of the positioning accu- racy that can be attained with such an approach. 3. Simulation Results To keep consistency with [5], we considered a network with hexagonal structure Figure 1 of four BSs (BS1 – BS4). The structure shown corresponds to the “edge ex- cited” network geometry, which assumes that a cell con- sists of three sectors and the BS is located at their verti- ces. Due to the properties of a hexagonal layout the dis- tances between any neighboring BSs are the same and equal to d. Hereinafter, the coordinates normalized to d are considered. This means that the distance between any 122 112 21 12 12 2112 21 12 ()()()( )()()() ()()()() ()()()()()()() ()()()() babaA babab IC abb a abbaa bbbaa IC abb a yyxxxxyyxxx yyxxx xyyxx yyxx x xyyy yy yxxyyyxxy yyyxx yyxx (2) 11 21 ,,, 1111 acaccbcb x acxyacy xbaxybay xyxy acacba ba (3) 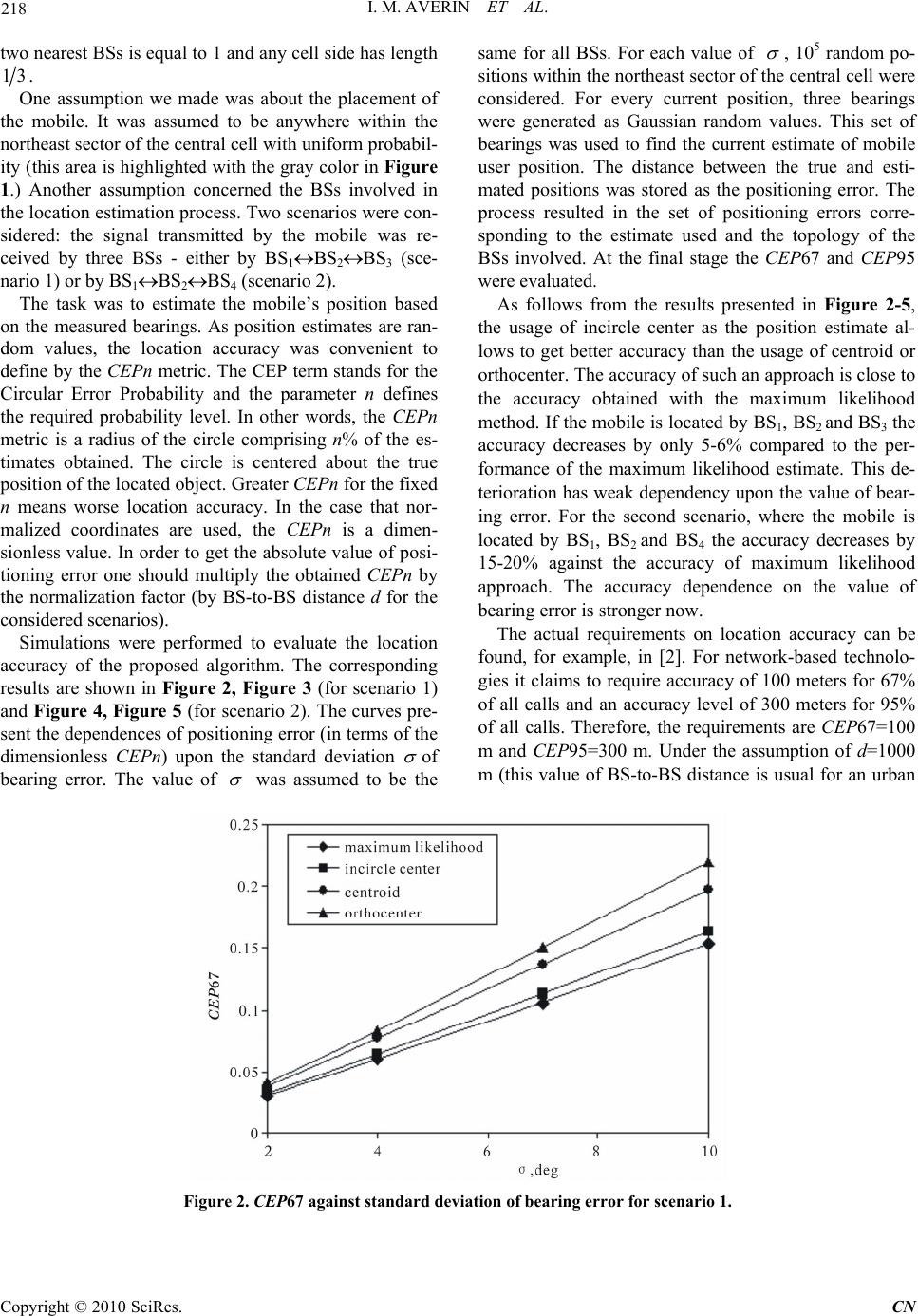 I. M. AVERIN ET AL. Copyright © 2010 SciRes. CN 218 two nearest BSs is equal to 1 and any cell side has leng th 13. One assumption we made was about the placement of the mobile. It was assumed to be anywhere within the northeast sector of the central cell with uniform probabil- ity (this area is highlighted with th e gray color in Figure 1.) Another assumption concerned the BSs involved in the location estimation process. Two scenarios were con- sidered: the signal transmitted by the mobile was re- ceived by three BSs - either by BS1BS2BS3 (sce- nario 1) or by B S1BS2BS4 (scenario 2). The task was to estimate the mobile’s position based on the measured bearings. As position estimates are ran- dom values, the location accuracy was convenient to define by the CEPn metric. The CEP term stands for the Circular Error Probability and the parameter n defines the required probability level. In other words, the CEPn metric is a radius of the circle comprising n% of the es- timates obtained. The circle is centered about the true position of the lo cated obj ect. Greater CEPn for the fixed n means worse location accuracy. In the case that nor- malized coordinates are used, the CEPn is a dimen- sionless value. In order to get the absolute value of posi- tioning error one should multiply the obtained CEPn by the normalization factor (by BS-to-BS distance d for the considered scenarios). Simulations were performed to evaluate the location accuracy of the proposed algorithm. The corresponding results are shown in Figure 2, Figure 3 (for scenario 1) and Figure 4, Figure 5 (for scenario 2). The curves pre- sent the dependences of positioning error (in terms of the dimensionless CEPn) upon the standard deviation of bearing error. The value of was assumed to be the same for all BSs. For each value of , 105 random po- sitions within the north east sector of the cen tral cell were considered. For every current position, three bearings were generated as Gaussian random values. This set of bearings was used to find the current estimate of mobile user position. The distance between the true and esti- mated positions was stored as the positioning error. The process resulted in the set of positioning errors corre- sponding to the estimate used and the topology of the BSs involved. At the final stage the CEP67 and CEP95 were evaluated. As follows from the results presented in Figure 2-5, the usage of incircle center as the position estimate al- lows to get better accuracy than the usage of centroid or orthocenter. The accuracy of such an approach is close to the accuracy obtained with the maximum likelihood method. If the mobile is located by BS1, BS2 and BS3 the accuracy decreases by only 5-6% compared to the per- formance of the maximum likelihood estimate. This de- terioration has weak dependency upon the value of bear- ing error. For the second scenario, where the mobile is located by BS1, BS2 and BS4 the accuracy decreases by 15-20% against the accuracy of maximum likelihood approach. The accuracy dependence on the value of bearing error is stronger now. The actual requirements on location accuracy can be found, for example, in [2]. For network-based technolo- gies it claims to require accuracy of 100 meters for 67% of all calls and an accuracy level of 300 meters for 95% of all calls. Therefore, the requirements are CEP67=100 m and CEP95=300 m. Under the assumption of d=1000 m (this value of BS-to-BS distance is usual for an urban Figure 2. CEP67 against standard deviation of bearing error for scenario 1. 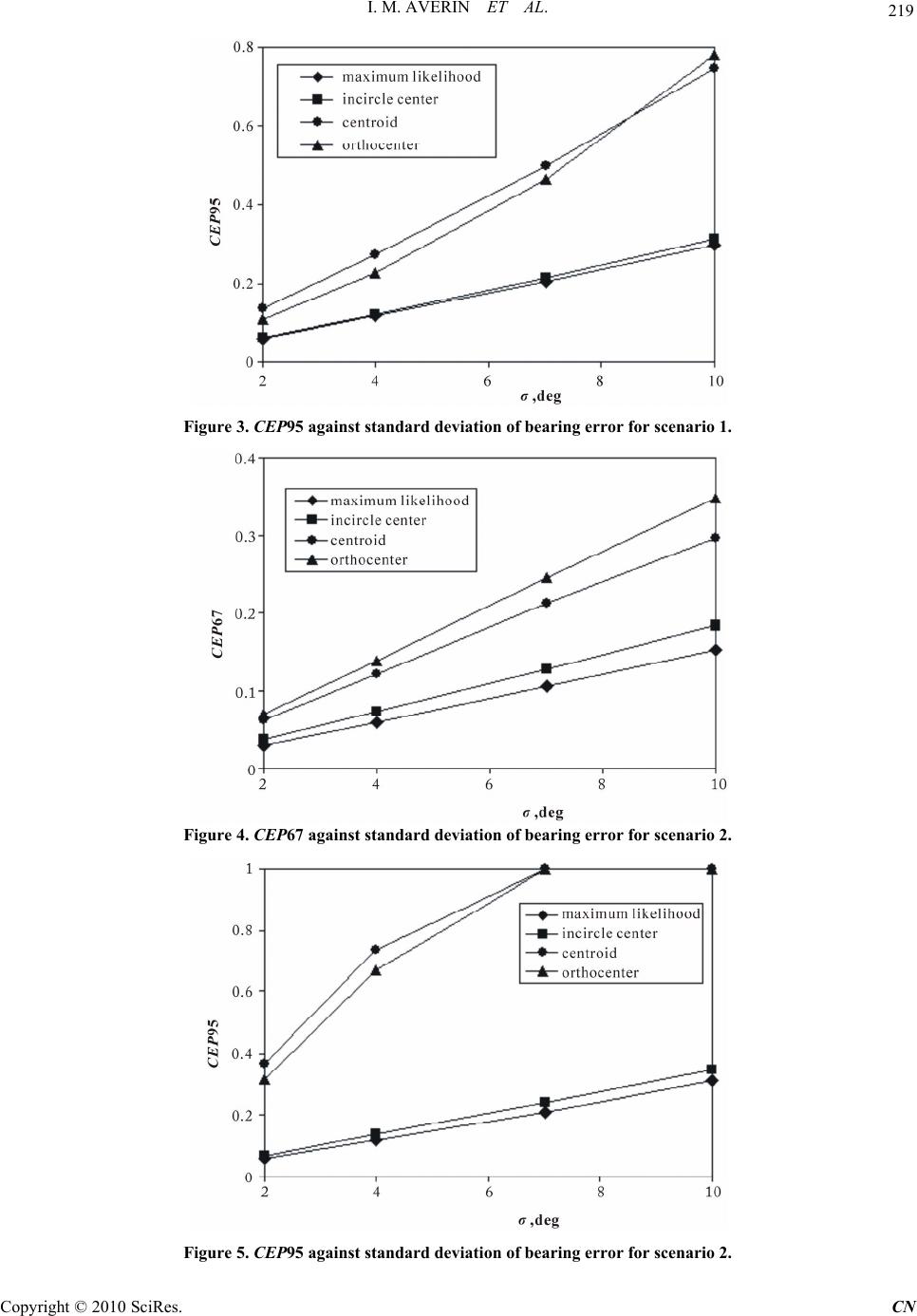 I. M. AVERIN ET AL. 219 Figure 3. CEP95 against standard deviation of bearing error for scenario 1. Figure 4. CEP67 against standard deviation of bearing error for scenario 2. Figure 5. CEP95 against standard deviation of bearing error for scenario 2. Copyright © 2010 SciRes. CN 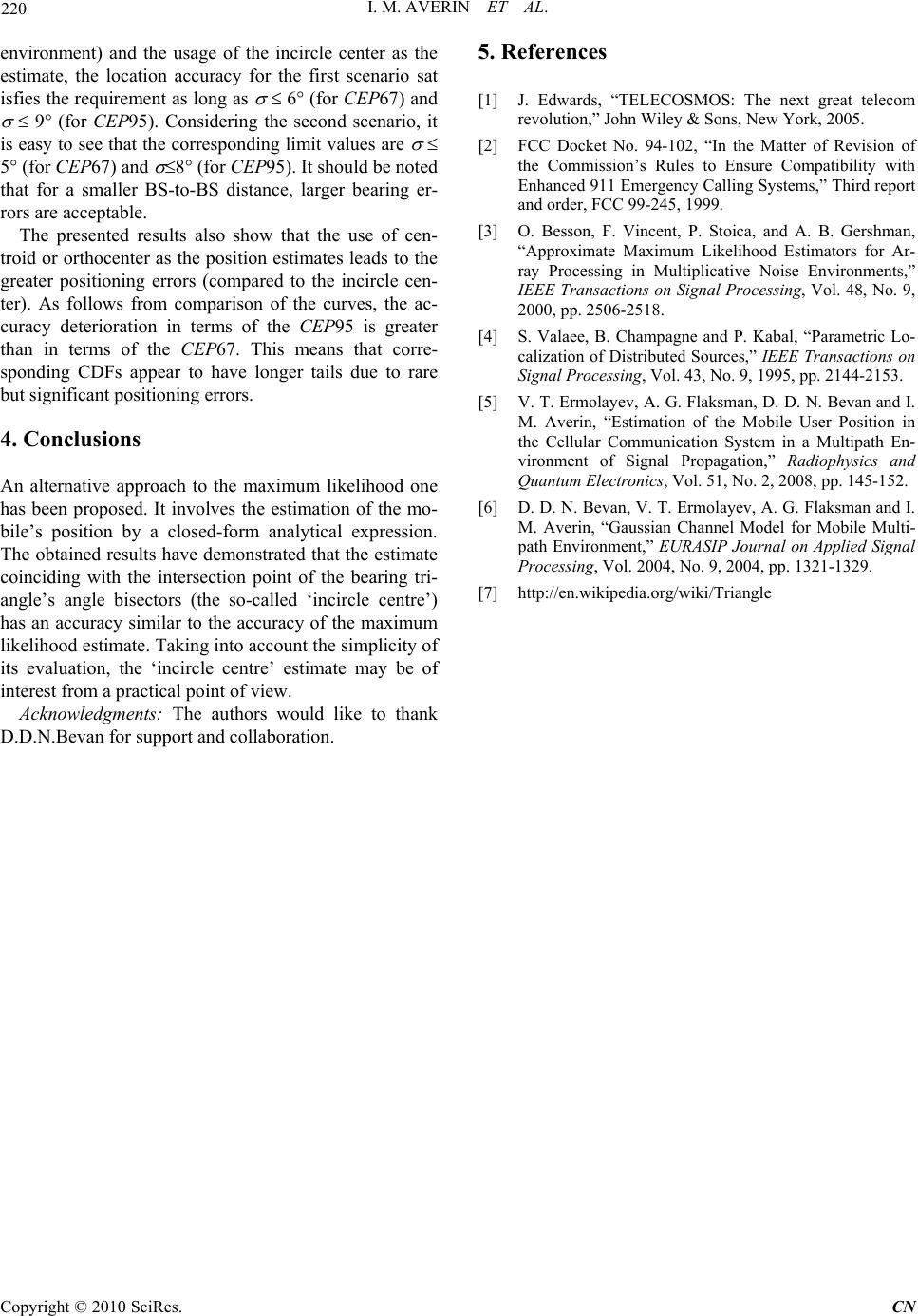 I. M. AVERIN ET AL. Copyright © 2010 SciRes. CN 220 environment) and the usage of the incircle center as the estimate, the location accuracy for the first scenario sat isfies the requirement as long as 6 (for CEP67) and 9 (for CEP95). Considering the second scenario, it is easy to see that the corresponding limit values are 5 (for CEP67) and 8 (for CEP95). It should be noted that for a smaller BS-to-BS distance, larger bearing er- rors are acceptable. The presented results also show that the use of cen- troid or orthocenter as the position estimates lead s to the greater positioning errors (compared to the incircle cen- ter). As follows from comparison of the curves, the ac- curacy deterioration in terms of the CEP95 is greater than in terms of the CEP67. This means that corre- sponding CDFs appear to have longer tails due to rare but significant positioning errors. 4. Conclusions An alternative approach to the maximum likelihood one has been proposed. It involves the estimation of the mo- bile’s position by a closed-form analytical expression. The obtained results have demonstrated that the estimate coinciding with the intersection point of the bearing tri- angle’s angle bisectors (the so-called ‘incircle centre’) has an accuracy similar to the accuracy of the maximum likelihood estimate. Taking in to accoun t the si mplicity of its evaluation, the ‘incircle centre’ estimate may be of interest from a practical point of view. Acknowledgments: The authors would like to thank D.D.N.Bevan for support and collabora tion. 5. References [1] J. Edwards, “TELECOSMOS: The next great telecom revolution,” John Wiley & Sons, New York, 2005. [2] FCC Docket No. 94-102, “In the Matter of Revision of the Commission’s Rules to Ensure Compatibility with Enhanced 911 Emergency Calling Systems,” Third report and order, FCC 99-245, 1999. [3] O. Besson, F. Vincent, P. Stoica, and A. B. Gershman, “Approximate Maximum Likelihood Estimators for Ar- ray Processing in Multiplicative Noise Environments,” IEEE Transactions on Signal Processing, Vol. 48, No. 9, 2000, pp. 2506-2518. [4] S. Valaee, B. Champagne and P. Kabal, “Parametric Lo- calization of Distributed Sources,” IEEE Transactions on Signal Processing, Vol. 43, No. 9, 1995, pp. 2144-2153. [5] V. T. Ermolayev, A. G. Flak sman, D. D. N. Bevan and I. M. Averin, “Estimation of the Mobile User Position in the Cellular Communication System in a Multipath En- vironment of Signal Propagation,” Radiophysics and Quantum Electronics, Vol. 51, No. 2, 2008, pp. 145-152. [6] D. D. N. Bevan, V. T. Ermolay ev, A. G. Flaksman and I. M. Averin, “Gaussian Channel Model for Mobile Multi- path Environment,” EURASIP Journal on Applied Signal Processing, Vol. 2004, No. 9, 2004, pp. 1321-1329. [7] http://en.wikipedia.org/wiki/Triangle |