Circuits and Systems, 2013, 4, 117-122
http://dx.doi.org/10.4236/cs.2013.41017 Published Online January 2013 (http://www.scirp.org/journal/cs)
Performance Analysis of an Inverse Notch Filter and Its
Application to F0 Estimation
Yosuke Sugiura, Arata Kawamura, Youji Iiguni
Graduate School of Engineering Science, Osaka University, Osaka, Japan
Email: yosuke@sip.sys.es.osaka-u.ac.jp
Received November 21, 2012; revised December 21, 2012; accepted December 29, 2012
ABSTRACT
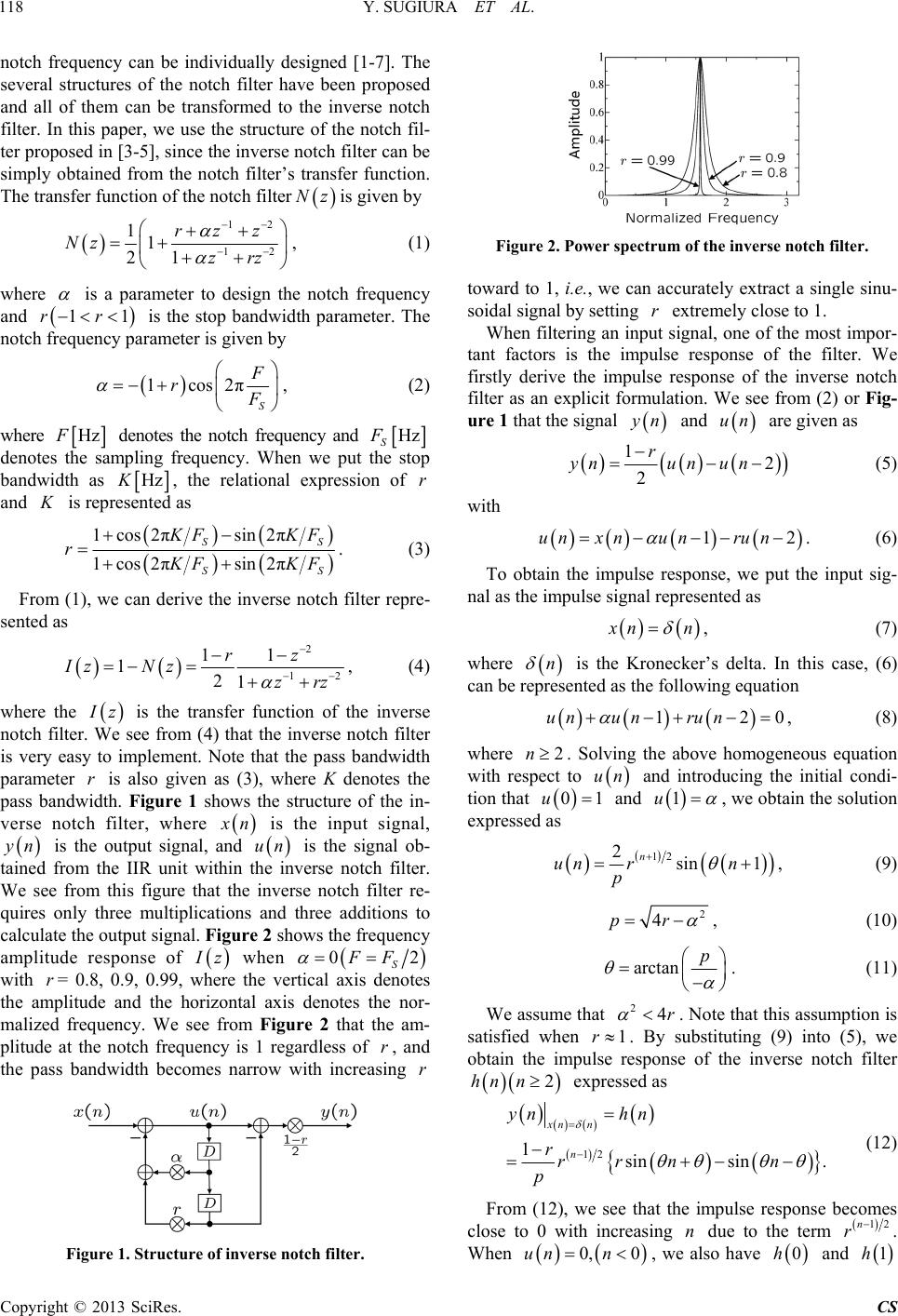
In this paper, we analyze an inverse notch filter and present its application to F0 (fundamental frequency) estimation.
The inverse notch filter is a narrow band pass filter and it has an infinite impulse response. We derive the explicit forms
for the impulse response and the sum of squared impulse response. Based on the analysis result, we derive a normalized
inverse notch filter whose pass band area is identical to unit. As an application of the normalized inverse notch filter, we
propose an F0 estimation method for a musical sound. The F0 estimation method is achieved by connecting the normal-
ized inverse notch filters in parallel. Estimation results show that the proposed F0 estimation method effectively detects
F0s for piano sounds in a mid-range.
Keywords: Band Pass Filter; Inverse Notch Filter; Impulse Response Analysis
1. Introduction
In speech processing, image processing, biomedical sig-
nal processing, and many other signal processing fields,
it is important to eliminate the narrowband signal. The
examples of the narrowband signal are a hum noise from
the power supply, an acoustic feedback, and an interfere-
ence noise, and so on. A notch filter is useful for the
elimination of the narrowband signal [1-7], where the
notch filter passes all frequencies expect of a stop fre-
quency band centered on a center frequency, called as the
notch frequency. The notch filter has a simple structure,
and its stop bandwidth and its notch frequency are indi-
vidually designed. The notch filter is used in many ap-
plications and it has been analyzed in many literatures
[1,4-7].
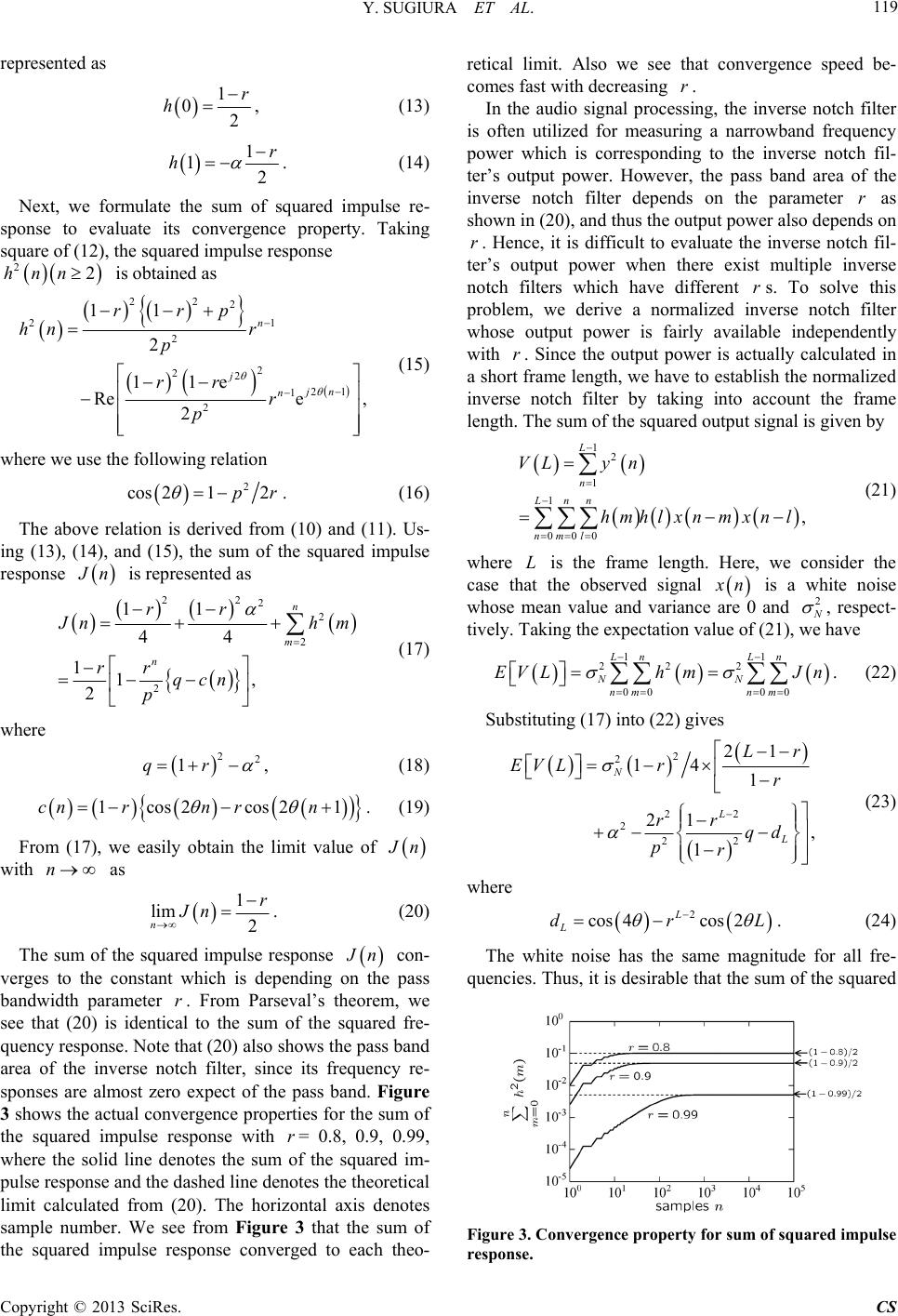
On the other hand, an inverse notch filter is a band
pass filter which has the inverse characteristics of the
notch filter. In contrast to the notch filter, there are few
applications of the inverse notch filter. As an example of
the applications, an active noise control system for re-
ducing a sinusoidal noise has been proposed [8]. In this
system, the inverse notch filter is used to extract the si-
nusoidal noise. Unfortunately, the system is designed
without respect to the impulse response of the inverse
notch filter. Hence, the inverse notch filter cannot accu-
rately extract the sinusoidal noise when the filter output
is in the transient state. To utilize the inverse notch filter
more effectively for not only the active noise control
system but also many other applications, a more detail
analysis of the impulse response for the inverse notch
filter needs to be required.
In this paper, we derive an explicit form for the infinite
impulse response of the inverse notch filter. Additionally,
we derive an explicit form for the sum of the squared
impulse response. Then, we reveal the limit values of
these two infinite sequences. Next, based on the analysis
results, we propose a normalized notch filter whose pass
band area is adjusted to unit. The normalized inverse
notch filter is efficient to estimate the output power in the
short time such as the frame processing. Finally, as an
application of the normalized inverse notch filter, we
present an F0 estimation method for a musical sound. In
the F0 estimation method, we use multiple normalized
inverse notch filters whose pass frequencies are identical
to F0s for each monophonic sound, respectively. These
normalized inverse notch filters are connected in parallel.
In the estimation procedure, we detect F0 from the in-
verse notch filter whose output power is largest among
all the inverse notch filter output powers. From the
simulation results, we see that the proposed F0 estimation
method can effectively detect the F0 both of for the
monophonic sounds and the polyphonic sounds.
2. Performance Analysis of Inverse Notch
Filter
In this section, we explain both of the notch filter and the
inverse notch filter, where the latter filter has an inverse
characteristic of the notch filter. The notch filter passes
all frequencies expect of the narrow frequency band cen-
tered on the notch frequency. The stop bandwidth and the
C
opyright © 2013 SciRes. CS