Paper Menu >>
Journal Menu >>
 Energy and Power Engineering, 2010, 2, 306-312 doi:10.4236/epe.2010.24043 Published Online November 2010 (http://www.SciRP.org/journal/epe) Copyright © 2010 SciRes. EPE An Improved Catastrophic Genetic Algorithm and Its Application in Reactive Power Optimization Ouyang Sen College of Electric Power, South China University of Technology Guangzhou, China E-mail: OuyangS@scut.edu.cn Received April 22, 2010; revised June 19, 2010; accepted August 17, 2010 Abstract This paper presents an Improved Catastrophic Genetic Algorithm (ICGA) for optimal reactive power opti- mization. Firstly, a new catastrophic operator to enhance the genetic algorithms’ convergence stability is proposed. Then, a new probability algorithm of crossover depending on the number of generations, and a new probability algorithm of mutation depending on the fitness value are designed to solving the main con- flict of the convergent speed with the global astringency. In these ways, the ICGA can prevent premature convergence and instability of genetic-catastrophic algorithms (GCA). Finally, the ICGA is applied for power system reactive power optimization and evaluated on the IEEE 14-bus power system, and the applica- tion results show that the proposed method is suitable for reactive power optimization in power system. Keywords: Genetic Algorithms, Reactive Power Optimization, Catastrophe, Power System 1. Introduction The reactive power optimization (RPO), which is a non- linear planning problem with the traits of discrete, multiple variables and multiple constraints, has a significant influ- ence on secure and economic operation of power systems. It is an effective approach to improve voltage level, de- crease network losses and maintain the power system run- ning under normal conditions. In this field, many tradi- tional methods have been used, including linear program- ming (LP) [1], nonlinear programming (NLP) [2], and inte- rior point methods (IPM) [3]. But, there are some draw- backs in these conventional methods that can limit their application in RPO, such as the complexity of algorithms, poor convergence properties, and the difficulty of dealing with dispersed variables. Recently, Genetic Algorithm (GA) has been widely used to RPO [4-7]. GA has been theoretically and empirically proven to provide robust search in complex spaces. Nu- merous papers and dissertations establish the validity of the technique in optimization and control applications [8]. However, it is known that the main shortcoming of GA is premature [9,10]. To overcome this, Genetic-Catastro- phic Algorithm (GCA) is presented in [11], in which a new operator, catastrophic operator, is proposed to recover the population diversity when premature is happened. Since the notion of GCA is proposed, there were several researches. Meiying liao [12] analyze the mechanism of catastrophic operator in GA, Yongjun Zhang [13] pre- sented an improved catastrophic operator to enhance the diversity of the small size populations. Others, GCA have been successfully used in many fields of power system, such as RPO [13], optimal power purchase planning [14] and optimal configuration of switching devices in distribu- tion system [15]. The GCA mentioned above is mainly concentrated on improving the searching capability of SGA, but ignoring the instability caused by catastrophic operator. In this paper, based on the analysis of mechanism of GCA, an Improved Catastrophic Genetic Algorithm (ICGA) is proposed. In ICGA, a new catastrophic operator is designed for improv- ing the stability of the proposed method, Besides, in order to improve the GA’s convergent speed and searching capa- bility, adaptive genetic algorithm (AGA) is also introduced in this paper, in which crossover and mutation probabilities are varied depending on the number of generations and the fitness value, respectively. An attempt to apply ICGA to RPO is presented in this paper. The feasibility of the proposed algorithm for RPO is demonstrated and compared with IEEE 14-bus systems. The experimental results prove that the algorithm is rea- sonable and practicable. 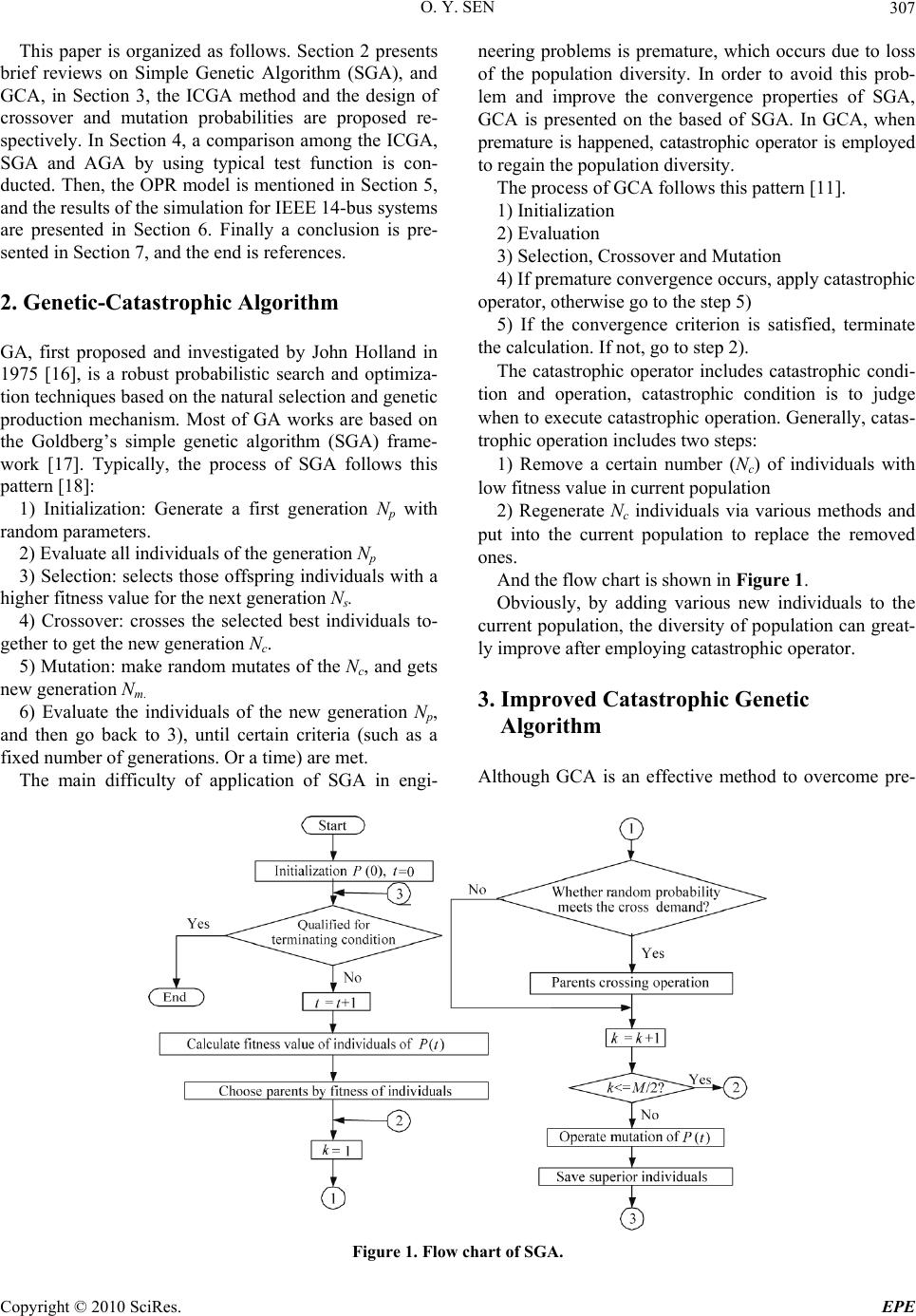 O. Y. SEN Copyright © 2010 SciRes. EPE 307 This paper is organized as follows. Section 2 presents brief reviews on Simple Genetic Algorithm (SGA), and GCA, in Section 3, the ICGA method and the design of crossover and mutation probabilities are proposed re- spectively. In Section 4, a comparison among the ICGA, SGA and AGA by using typical test function is con- ducted. Then, the OPR model is mentioned in Section 5, and the results of the simulation for IEEE 14-bus systems are presented in Section 6. Finally a conclusion is pre- sented in Section 7, and the end is references. 2. Genetic-Catastrophic Algorithm GA, first proposed and investigated by John Holland in 1975 [16], is a robust probabilistic search and optimiza- tion techniques based on the natural selection and genetic production mechanism. Most of GA works are based on the Goldberg’s simple genetic algorithm (SGA) frame- work [17]. Typically, the process of SGA follows this pattern [18]: 1) Initialization: Generate a first generation Np with random parameters. 2) Evaluate all individuals of the generation Np 3) Selection: selects those offspring individuals with a higher fitness value for the next generation Ns. 4) Crossover: crosses the selected best individuals to- gether to get the new generation Nc. 5) Mutation: make random mutates of the Nc, and gets new generation Nm. 6) Evaluate the individuals of the new generation Np, and then go back to 3), until certain criteria (such as a fixed number of generations. Or a time) are met. The main difficulty of application of SGA in engi- neering problems is premature, which occurs due to loss of the population diversity. In order to avoid this prob- lem and improve the convergence properties of SGA, GCA is presented on the based of SGA. In GCA, when premature is happened, catastrophic operator is employed to regain the population diversity. The process of GCA follows this pattern [11]. 1) Initialization 2) Evaluation 3) Selection, Crossover and Mutation 4) If premature convergence occurs, apply catastrophic operator, otherwise go to the step 5) 5) If the convergence criterion is satisfied, terminate the calculation. If not, go to step 2). The catastrophic operator includes catastrophic condi- tion and operation, catastrophic condition is to judge when to execute catastrophic operation. Generally, catas- trophic operation includes two steps: 1) Remove a certain number (Nc) of individuals with low fitness value in current population 2) Regenerate Nc individuals via various methods and put into the current population to replace the removed ones. And the flow chart is shown in Figure 1. Obviously, by adding various new individuals to the current population, the diversity of population can great- ly improve after employing catastrophic operator. 3. Improved Catastrophic Genetic Algorithm Although GCA is an effective method to overcome pre- Figure 1. Flow chart of SGA. 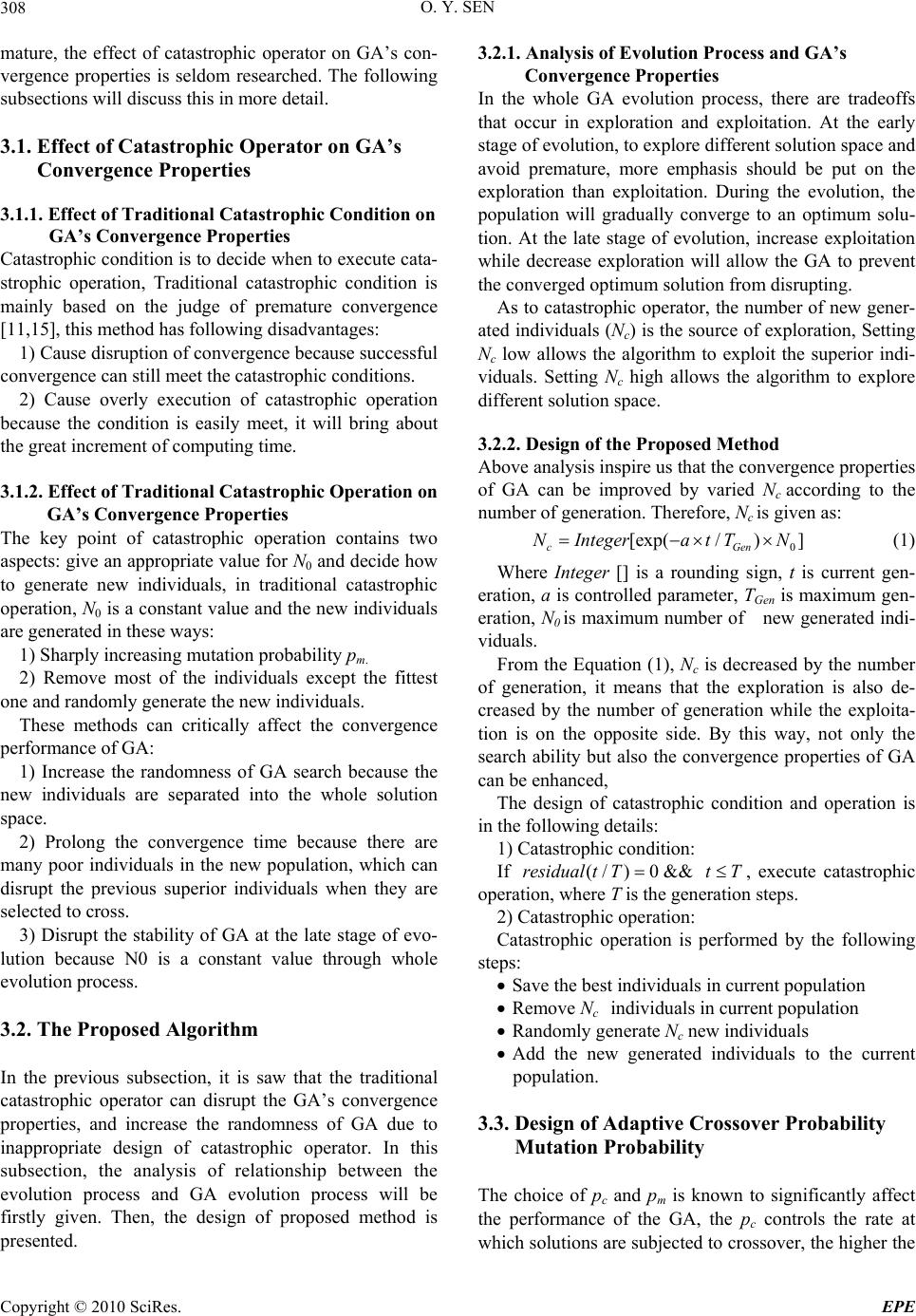 O. Y. SEN Copyright © 2010 SciRes. EPE 308 mature, the effect of catastrophic operator on GA’s con- vergence properties is seldom researched. The following subsections will discuss this in more detail. 3.1. Effect of Catastrophic Operator on GA’s Convergence Properties 3.1.1. Effect of Traditional Catastrophic Condition on GA’s Convergence Properties Catastrophic condition is to decide when to execute cata- strophic operation, Traditional catastrophic condition is mainly based on the judge of premature convergence [11,15], this method has following disadvantages: 1) Cause disruption of convergence because successful convergence can still meet the catastrophic conditions. 2) Cause overly execution of catastrophic operation because the condition is easily meet, it will bring about the great increment of computing time. 3.1.2. Effect of Traditional Catastrophic Operation on GA’s Convergence Properties The key point of catastrophic operation contains two aspects: give an appropriate value for N0 and decide how to generate new individuals, in traditional catastrophic operation, N0 is a constant value and the new individuals are generated in these ways: 1) Sharply increasing mutation probability pm. 2) Remove most of the individuals except the fittest one and randomly generate the new individuals. These methods can critically affect the convergence performance of GA: 1) Increase the randomness of GA search because the new individuals are separated into the whole solution space. 2) Prolong the convergence time because there are many poor individuals in the new population, which can disrupt the previous superior individuals when they are selected to cross. 3) Disrupt the stability of GA at the late stage of evo- lution because N0 is a constant value through whole evolution process. 3.2. The Proposed Algorithm In the previous subsection, it is saw that the traditional catastrophic operator can disrupt the GA’s convergence properties, and increase the randomness of GA due to inappropriate design of catastrophic operator. In this subsection, the analysis of relationship between the evolution process and GA evolution process will be firstly given. Then, the design of proposed method is presented. 3.2.1. Analysis of Evolution Process and GA’s Convergence Properties In the whole GA evolution process, there are tradeoffs that occur in exploration and exploitation. At the early stage of evolution, to explore different solution space and avoid premature, more emphasis should be put on the exploration than exploitation. During the evolution, the population will gradually converge to an optimum solu- tion. At the late stage of evolution, increase exploitation while decrease exploration will allow the GA to prevent the converged optimum solution from disrupting. As to catastrophic operator, the number of new gener- ated individuals (Nc) is the source of exploration, Setting Nc low allows the algorithm to exploit the superior indi- viduals. Setting Nc high allows the algorithm to explore different solution space. 3.2.2. Design of the Proposed Method Above analysis inspire us that the convergence properties of GA can be improved by varied Nc according to the number of generation. Therefore, Nc is given as: 0 [exp(/ )] cGen NIntegerat TN (1) Where Integer [] is a rounding sign, t is current gen- eration, a is controlled parameter, TGen is maximum gen- eration, N0 is maximum number of new generated indi- viduals. From the Equation (1), Nc is decreased by the number of generation, it means that the exploration is also de- creased by the number of generation while the exploita- tion is on the opposite side. By this way, not only the search ability but also the convergence properties of GA can be enhanced, The design of catastrophic condition and operation is in the following details: 1) Catastrophic condition: If (/ )0residual tT && tT, execute catastrophic operation, where T is the generation steps. 2) Catastrophic operation: Catastrophic operation is performed by the following steps: Save the best individuals in current population Remove Nc individuals in current population Randomly generate Nc new individuals Add the new generated individuals to the current population. 3.3. Design of Adaptive Crossover Probability Mutation Probability The choice of pc and pm is known to significantly affect the performance of the GA, the pc controls the rate at which solutions are subjected to crossover, the higher the  O. Y. SEN Copyright © 2010 SciRes. EPE 309 value of pc the quicker are the new individuals intro- duced into the population, vice versa. When a population converges to a global optimal solution (or even a local optimal solution), pc and pm increase and may cause the disruption of the near-optimal solutions, therefore, it is hoped that pc is given a high value to create more indi- viduals at the early stage of evolution and maintaining a relatively low value for the purpose of protecting supe- rior individuals and algorithm’s stability at the late stage of evolution process, in this paper, pc is gradually de- creased depending on the number of generation in sig- moid function form: max min min () () (2) 1exp( ) cc cc Gen Gen PP Pt P AT t T (2) where pc(t) is crossover probability generation in t gen- eration, Pcmax is maximum crossover probability, Pcmax is minimum crossover probability and A is assigned 9.903438. Mutation operator is used to maintain genetic diversity from one generation of a population of chromosomes to the next, the choice of pm is critical to GA performance, large values of pm transform the GA into a purely random search algorithm, In this paper, pm is varied adaptively depended on both the number generation and every fit- ness value of individual: max min min () (2) 1exp( ) max imm mt m Gen max Gen f-f(X)PP P exp()P AT t f T (3) where Pm(t) is mutation probability of individual Xi in t generation, Pmmax is maximum mutation probability, Pmmax is minimum mutation probability, A is assigned 9.903438. 4. Performance Measures In this section, the experiments that are conducted to compare the performance of the ICGA, SGA and AGA [19] are discussed. In order to test these methods’ con- vergent speed, the average number of generations that these GA methods require to generate a solution with a certain high fitness value and the average consumed times are taken into consideration. These can be obtained by performing the experiment repeatedly (in our case, 100 times). To measure the convergence probability of these methods, the number of instance (in 100 trials) for which the GAs have successfully converged to the given optimal solution is also employed. 4.1. Test Functions In this research, the following multimodal functions with varying complexities are used [19]: 22 2 11 2121 ( ,)100()(1) 2.0482.048 (1,2) i f xxxxx xi (4) 22 2 12 212 222 12 sin (, ) 0.5[1.0 0.001()] 10010 0(1,2) i xx fxx xx xi (5) Function f1 is a two-dimension function and has only one minimum in its whole solution space. But it is an abnormal function and is not optimized easily. Its global minimum is f1(1,1)) = 0; Function f2 is a rapidly varying multimodal function with two variables, and is symmet- ric about the origin with the height of the barrier between innumerable adjacent minima increasing as the global optimal solution is approached. f(0,0) = 0 is its global minimum. 4.2. Experiment Results In all our experiments, the population size for all func- tions is 64 and TGen is given 100, For the SGA, Pc = 0.9, Pm = 0.1, For the AGA, k1 = k3 = 1, k2 = k4 = 0.5, Pcmax = 0.9, Pcmin = 0.5, Pmmax = 0.1, Pmmin = 0.01. And for the ICGA, Pcmax = 0.9, Pcmin = 0.5, Pmmax = 0.1, Pmmin = 0.01, a = 10, N0 = 59. The algorithm will be stop when each GAs attaining a solution with an objective functional value of f1 (f2) equal to the threshold 0.0001, the ex- perimental results are presented in Table 1: As Table 1, both average generation and consumed time of ICGA are less than SGA and AGA, Others, the convergence times of ICGA is the best, it indicates that ICGA can effectively ‘jump’ from the local optimum. 5. Reactive Power Optimization Model RPO is mainly implemented by setting generator bus voltages, VAR compensators and transformer taps. The core of the RPO problem is to determine the reasonable reactive power compensation point and the best com- pensation capacity, than it can minimize the real power losses and improve voltage profile. The models of reac- tive power optimization are described as follows: 5.1. Objective Function 1 (cossin) N lossjj ijijijij ijh PVVG B (6)  O. Y. SEN Copyright © 2010 SciRes. EPE 310 Table 1. Comparison of performance of SGA, AGA and ICGA. Function Average Generations Convergence Times Consumed Time f1 SGA 91 AGA 61 ICGA 41 SGA 82 AGA 92 ICGA 97 SGA 0.47 AGA0.36 ICGA 0.28 f2 48 35 28.9 71 91 99 0.39 0.32 0.22 where Ploss is net loss for meritorious indicators, N is the number assemble of transmission lines in the network, Vi is the voltage value at bus i, Vj is the voltage value at bus j, δij is the phase-angle difference of the voltage value between bus i and j, Gij and B ij are admittance matrix elements in the real and imaginary parts. 5.2. Constraints 1 1 (cos sin) (sin-cos) N ii jijijijij j N ii jijijijij j PV VGdBd QV VGdBd (7) where Pi, Qi, Vi is active power, reactive power and voltage of node i respectively. Variable equation: Power system safe operation must be made within the scope. Select capacitive reactive power compensation capacity Ci, adjustable transformer tap position Tj and generator terminal voltage V gk as the control variables. And select and Node voltage amplitude Vi as state vari- ables reactive power generators Qgj.. min max min max min max iii jjj gkgk gk CCC TTT VVV (8) The unequal constraint (9) is the unequal constraint of the control variable vector, where Tjmin, Timax is adjustable load transformer tap position of the upper and lower limit. Cimin, Cimax is capacitive reactive power compensation capacity of the upper and lower limit; Vgkmin, Vgkmax is generator terminal voltage the upper and lower limits. min max min max iii gjgj gj VVV QQQ (9) The unequal constraint (10) is the unequal constraint of dependent variable vector, where Vimin, Vimax are the node voltage amplitude of the upper and lower limit. Qgjmin, Qgjmax are the limits of generators reactive power. The control variables are self-constrained and dependent variables are constrained by adding them as penalty terms to the objective function (Equation (1)). So the objective function is changed to: 22 ()( ) max minmaxmin min loss Q Vgi i VQ VVQ Q i igigi P (10) where λV and λQ are penalty factors; ΔVi and ΔQgi are the violations of load-bus voltages and generators reactive power, respectively, defined as: min min min max max max 0 iiii iiii iii i VVVV VVVV VVV V (11) min min min max max max 0 gigi gigi gigigi gi gi giigigi QQQQ QQQQ QQQ Q (12) 6. Numerical Results The study is implemented using Matlab and tested on an IEEE 14-bus system, which includes three transformers, two generators and three compensation points. The step size of reactive power compensation and transformer tap ratios is 0.05 pu and 0.0125 pu respectively. Capacity ceiling of Reactive compensation device is 0.5 pu, and the step is 0.01 pu. The control variables are showed as: Y= [UG1 U G2 Q G3 Q G6 Q G8 T 47 T 49 T 56]. Details of this system and parameters are given in [20]. The number of generation is 30 and other parameters are following: TGen = 30, N0 = 29, λV = 15, λQ = 1.5.The best optimization results of SGA, ICGA and GCA are given in Table 2, which are obtained from different kinds of algorithm respectively performing 30 times. As Table 2, the initial generator reactive power QG2 and load voltages VD3~VD14 are outside their limits, after optimization by the three methods, all the state variables are regulated back into their limits, besides, Ploss is de- creased to 0.1375 by ICGA while that of 0.1378 by GCA and 0.1385 by SGA, thus, ICGA may find better out- come than the rest kinds of methods. Table 3 shows the comparison of the best, worst, av- erage and standard deviation values for different methods. Due to probabilistic characteristic of evolutionary algo- rithms, results reported here correspond to average from 30 trials. 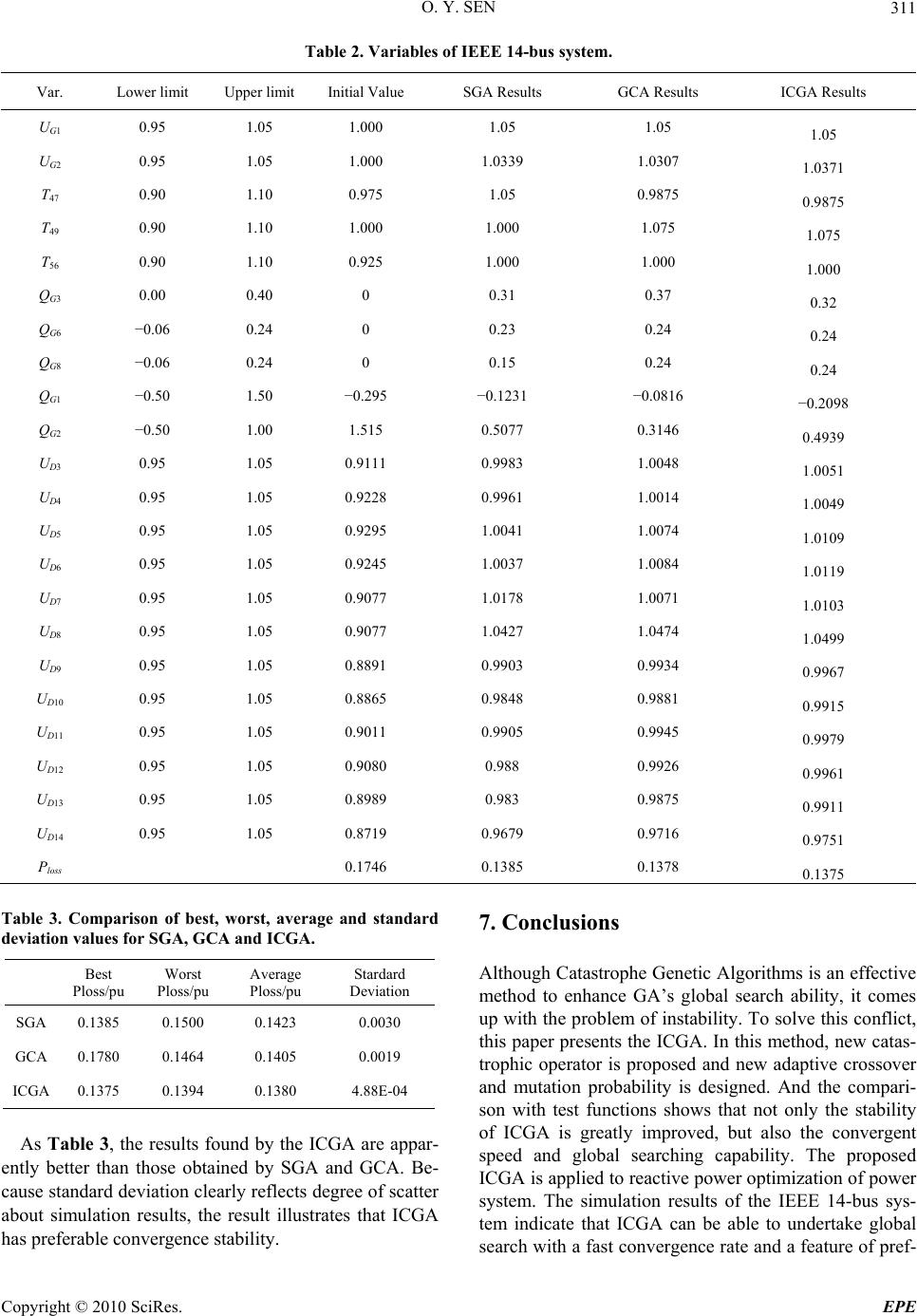 O. Y. SEN Copyright © 2010 SciRes. EPE 311 Table 2. Variables of IEEE 14-bus system. Var. Lower limit Upper limit Initial Value SGA Results GCA Results ICGA Results UG1 0.95 1.05 1.000 1.05 1.05 1.05 UG2 0.95 1.05 1.000 1.0339 1.0307 1.0371 T47 0.90 1.10 0.975 1.05 0.9875 0.9875 T49 0.90 1.10 1.000 1.000 1.075 1.075 T56 0.90 1.10 0.925 1.000 1.000 1.000 QG3 0.00 0.40 0 0.31 0.37 0.32 QG6 −0.06 0.24 0 0.23 0.24 0.24 QG8 −0.06 0.24 0 0.15 0.24 0.24 QG1 −0.50 1.50 −0.295 −0.1231 −0.0816 −0.2098 QG2 −0.50 1.00 1.515 0.5077 0.3146 0.4939 UD3 0.95 1.05 0.9111 0.9983 1.0048 1.0051 UD4 0.95 1.05 0.9228 0.9961 1.0014 1.0049 UD5 0.95 1.05 0.9295 1.0041 1.0074 1.0109 UD6 0.95 1.05 0.9245 1.0037 1.0084 1.0119 UD7 0.95 1.05 0.9077 1.0178 1.0071 1.0103 UD8 0.95 1.05 0.9077 1.0427 1.0474 1.0499 UD9 0.95 1.05 0.8891 0.9903 0.9934 0.9967 UD10 0.95 1.05 0.8865 0.9848 0.9881 0.9915 UD11 0.95 1.05 0.9011 0.9905 0.9945 0.9979 UD12 0.95 1.05 0.9080 0.988 0.9926 0.9961 UD13 0.95 1.05 0.8989 0.983 0.9875 0.9911 UD14 0.95 1.05 0.8719 0.9679 0.9716 0.9751 Ploss 0.1746 0.1385 0.1378 0.1375 Table 3. Comparison of best, worst, average and standard deviation values for SGA, GCA and ICGA. Best Ploss/pu Worst Ploss/pu Average Ploss/pu Stardard Deviation SGA 0.1385 0.1500 0.1423 0.0030 GCA 0.1780 0.1464 0.1405 0.0019 ICGA 0.1375 0.1394 0.1380 4.88E-04 As Table 3, the results found by the ICGA are appar- ently better than those obtained by SGA and GCA. Be- cause standard deviation clearly reflects degree of scatter about simulation results, the result illustrates that ICGA has preferable convergence stability. 7. Conclusions Although Catastrophe Genetic Algorithms is an effective method to enhance GA’s global search ability, it comes up with the problem of instability. To solve this conflict, this paper presents the ICGA. In this method, new catas- trophic operator is proposed and new adaptive crossover and mutation probability is designed. And the compari- son with test functions shows that not only the stability of ICGA is greatly improved, but also the convergent speed and global searching capability. The proposed ICGA is applied to reactive power optimization of power system. The simulation results of the IEEE 14-bus sys- tem indicate that ICGA can be able to undertake global search with a fast convergence rate and a feature of pref-  O. Y. SEN Copyright © 2010 SciRes. EPE 312 erable convergence stability. It is proved to be efficient and practical during the reactive power optimization. 8. References [1] K. R. C. Mamandur and R. D. Chenoweth, “Optimal control of reactive power flow for improvements in volt- age profiles and for real power loss minimization,” IEEE Transaction on PAS, Vol. 100, No. 7, 1981, pp. 3185- 3194. [2] L. C. Li, J. Y. Wang, L. Y. Chen, et al., “Optimal reactive power planning of electrical power system,” Proceedings of the CSEE, Vol. 19, No. 2, 1999, pp. 66-69. [3] M. B. Liu and X. C. Wang, “An application of interior point method to solution of optimization problems in power systems,” Power System Technology, Vol. 23, No. 8, 1999, pp. 61-64, 68. [4] K. J. Iba, “Reactive Power Optimization by Genetic Al- gorithm,” IEEE Transactions on Power System, Vol. 9, No. 2, 1994, pp. 685-692. [5] P. Nallagownden, L T. Thin and N. C. Guan, “Applica- tion of Genetic Algorithm for the Reduction of Reactive Power Losses in Radial Distribution System,” IEEE In- ternational Conference on Power and Energy, Vol. 26, No. 5, 2006, 76-81. [6] P. Sreejaya and R. Rejitha, “Reactive power and Voltage Control in Kerala Grid and Optimization of Control Variables Using Genetic Algorithm,” IEEE International Conference on Power System Technology, 2008, 1-4. [7] H. W. Yan and J. N. Tao, “Reactive power optimization research of power system considered the generation transmission and distribution,” IEEE International Con- ference on Industrial Technology, Chengdu, 2008, pp. 1-4. [8] D. E. Goldberg and P. Segrest, “Finite Markov chain analysis of genetic algorithms,” Proceedings of 2nd In- ternational Conference Genetic Algorithms, 1987, pp. 1-8. [9] J. E. Baker, “Reducing bias and inefficiency in the selec- tion algorithm,” Proceedings of the 2nd Annual Confer- ence on Genetic Algorithms, Massachusetts Institute of Technology, Cambridge, 1985, pp. 14-21. [10] D. E. Goldberg, “Genetic algorithms and rule leaming in dynamic system control,” Proceedings of International Conference on Genetic Algorithms and Their Applica- tions, Pittsburgh, 1985, pp. 8-15. [11] X. D. Jin and Z. Li, “Genetic-Catastrophic Algorithms and Its Application in Nonlinear Control System,” Jour- nal of System Simulation, Vol. 9, No. 2, 1997, pp. 111- 115. [12] M. Y. Liao and Y. J. Zhang, “Study on the Effect of Cata- clysm Operator on Genetic Algorithm,” Computer Engi- neering and Application, Vol. 41, No. 13, 2005, pp. 54- 56. [13] Y. J. Zhang, Z. Ren, H. M. Zhong, Z. Y. Tang and C. Shang, “Cataclysmic Genetic Algorithms Based Optimal Reactive Power Planning,” Automation of Electric Power Systems, Vol. 26, No. 23, 2002, pp. 29-32. [14] Y. J. Zhang, W. G. Yuan, B. F. Li and M. C. Liao, “Op- timal Power Purchase Planning of Hainan Power Grid Company,” The 8th International Power Engineering Conference, December 2007, Singapore, pp. 1854-1858. [15] D. Wang, Y. K. Shi, J. Y. Cong, H. Sun and J. Y. Zou, “Application of Catastrophic Genetic Algorithm to the Opitmal Configuration of switching Devices in Distribu- tion System,” High Voltage Apparatus, Vol. 40, No. 3, 2004, pp. 180-182. [16] J. H. Holland, “Adaptation in natural and artificial sys- tems,” University of Michigan Press, Ann Arbor, 1975. [17] D. E. Goldberg, “Genetic Algorithms in Search, Optimi- zation and Machine Learning,” Addison-Wesley Pub- lishing Company Inc., Massachusetts, 1989. [18] L. Davis, Ed., “Genetic Algorithms and Simulated An- nealing,” Pitman, London, 1987. [19] M. Srinivas and L. M. Patnaik, “Adaptive probabilities of crossover and mutation in genetic algorithm,” IEEE Transactions on System, Man and Cybernetics, Vol. 24, No. 4, 1994, pp. 656-667. [20] Y. J. Zhang, “Cataclysmic Genetic Algorithm and MAS Based Model for Reactive Power Optimization for Power System,” Ph.D. Dissertation, South China University of Technology, Guangzhou, 2004. |