Paper Menu >>
Journal Menu >>
 Intelligent Control and Automation, 2010, 1, 96-104 doi:10.4236/ica.2010.12011 Published Online November 2010 (http://www.SciRP.org/journal/ica) Copyright © 2010 SciRes. ICA Force Control in Monopod Hopping Robot While Landing Vaidyabhushan Leela Krishnan, Pushparaj Mani Pathak, Satish Chandra Jain Department of Mechanical and Industrial Engineering, Indian Institute of Technology, Roorkee, India E-mail: {vlk08dme, pushpfme, sjainfme}@iitr.ernet.in Received August 23, 2010; revised September 12, 2010; accepted September 28, 2010 Abstract In this paper, the issue of control of impact forces generated during the interaction between the hopping ro- bot toe and the ground while landing has been considered. The force thus generated can damage the robot altogether. With the objective to control these impact forces, impedance control strategy has been applied to the hopping robot system. The dynamics pertaining to the impact between robot toe and ground has been modeled as in case of a ball bouncing on the ground. Bond Graph theory has been used for the modeling of the hopping robot system. Simulation results show that impact forces generated during the landing has been controlled to a specified limiting value. This model and the corresponding analysis can be further extended for understanding the dynamics involved in continuous hopping of robot with constant height and velocity control. Keywords: Hopping Robot, Impact Forces, Impedance Control 1. Introduction In recent years, legged robots, especially biped robots, have been developed to the extent that human-like walk- ing has become possible. In the next stage, robots need to move faster and get over larger obstacles. In this respect, hopping robots offers a potential solution. Due to the possibility of adjusting the stride length irrespective of the structural limits of a hopping robot, it can move faster and avoid larger obstacles than walking. Hopping robots can move with greater dexterity in an environment characterized by holes, steps and bumps. But an impor- tant issue related to hopping robot locomotion is reduc- ing the impact force from the ground at the instant of robot landing which may, otherwise, cause damage to robot. In order to resolve this problem, Raibert [1] used hy- draulic cylinders and Hyon et al. [2] used mechanical springs in their robotic legs. However, Hydraulic cylin- ders don’t have enough control performance, especially in the edge of the cylinders. Considering hopping as an extended function of walking, use of mechanical springs makes the hopping robot highly dependent on spring characteristics and the control to be complicated. Hence, suppressing impact force in the landing phase without cylinders or mechanical springs is a big issue to be dealt with. In addition to the force contro l during landing, it is also important to achieve a desired position of center of gravity (CG) of the hopping robot at the bottom most point i.e. bottom of stance phase. This ensures good tra- jectory robustness during the next hop. In order to deal with these issues, Sato et al. [3] has used a combined method of soft landing trajectory of robot body and optimal approach velocity to the ground. Fujii and Ohnishi [4] investigated this issue further and proposed a smooth transition method from compliance control to position control. However these methods could not achieve the desired objective of constant force con- trol during the landing phase and precise position control at the bottom. In this paper the issue under consideration is dealt with by controlling the driving point stiffness (impedance) at the interaction port between hopping robot toe and the physical ground i.e. environment. Pathak et al. [5] have used this control strategy employing passive degree of freedom (DOF) in controller domain for the control of interaction forces between space robot tip and environ- ment. The proposed controller deals adequately with the issue of force (compliance) control i.e. reducing ground impact forces at touchdown and position control at bot- tom so as to prepare hopping robot for the next hop. Bond Graph theory [6] ha s been us ed for the mod eling of the hopping robot system. Simulations have been per- formed using SYMBOLS Shakti [7], a bond graph mod- eling software. The paper is organized as follows. Section 2 presents  V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 97 the bond graph modeling technique. Section 3 presents the modeling of the impact of hopping robot toe with ground as in case of a ball bouncing on ground. Section 4 presents the dynamic modeling of a hopping robot. Sec- tion 5 describes the impedance control scheme being used to contro l the hopping robot and presen ts the corre- sponding simulation results. Section 6 discusses the re- sults and proposes the future work. 2. Bond Graph Modeling Technique The bond graph technique offers a very powerful tool for modeling physical systems and formulating the system equations. Systems from diverse branches of engineering science can be modeled in a unified manner using bond graphs [6]. The underlying idea in bond graph modeling is that physical systems in various domains interact dynami- cally through power as the common currency of ex- change. Hence bond graphs, essentially represents the power exchange portrait of the system. Power is ex- pressed as multiplication of two factors viz. generalized effort and generalized flow. In bond graph modeling, a system is considered to be a dynamic unit constituted of inertances (I), compliances (C), and dissipators (R). The external source inputs to system are expressed as source of effort (SE) or source of flow (SF) elements. Two multi-port elements trans- former (TF) and gyrator (GY) are also used. TF element performs flow to flow or effort to effort conversion whereas GY element converts flow to effort or effort to flow. System Constraints are represented using ‘1’ junc- tion (representing constant flow) and ‘0’ junction (repre- senting constant effort) elements. The elements are con- nected by line segments called bonds. The bonds portray the path of exchange of power within the constraint structure and elements. Power direction assignment in a bond graph is arbitrary in nature and may be compared with the fixing of coordinate systems in the correspond- ing physical domain. The notion of causality provides a tool for formulation of system equations. The notion of causality also enables a modeler to perform qualitative analysis of system behavior, viz. controllability, ob- servability, fault diagnosis, etc. Thus Bond graph mod- eling technique enhances a modeler’s insight into physi- cal system behavior. Figure 1 shows the various elements of bond graph along with their respective constitutive laws. In the pre- sent work, bond graph Modeling and its simulation are performed using SYMBOLS2000 [7]. It runs on win- dows XP envir onment. 3. Modeling of Impact between Hopping Robot Toe and Ground This section presents the modeling of impact dynamics of a hopping ro bot toe with ground. The modeling of the phenomenon is inspired from the dynamics of a ball hit- ting the ground [8]. Figure 2 shows a schematic figure representing the impact of a ball with ground. The Y-axis of the absolute (inertial) reference frame {A} shown in the figure represents the direction of vertical motion of the ball. In the figure, yB and yG represents the displace- ment of ball and ground with respect to the frame {A}. Similarly VB, VG denote the velocities of the ball and the ground respectively with respect to the inertial reference frame. The velocity of the ball and the ground can be derived by considering their kinematics relationships as: BB Vdydt , (1) GG Vdydt . (2) Hence Vr, relative velocity of ball with respect to the ground can be written as, rBg VVV (3) Hence, ‘yr’ relative displacement of the ball with respect to ground or specifically the point of contact is repre- sented as, Figure 1. Bond graph elements and their constitutive laws. 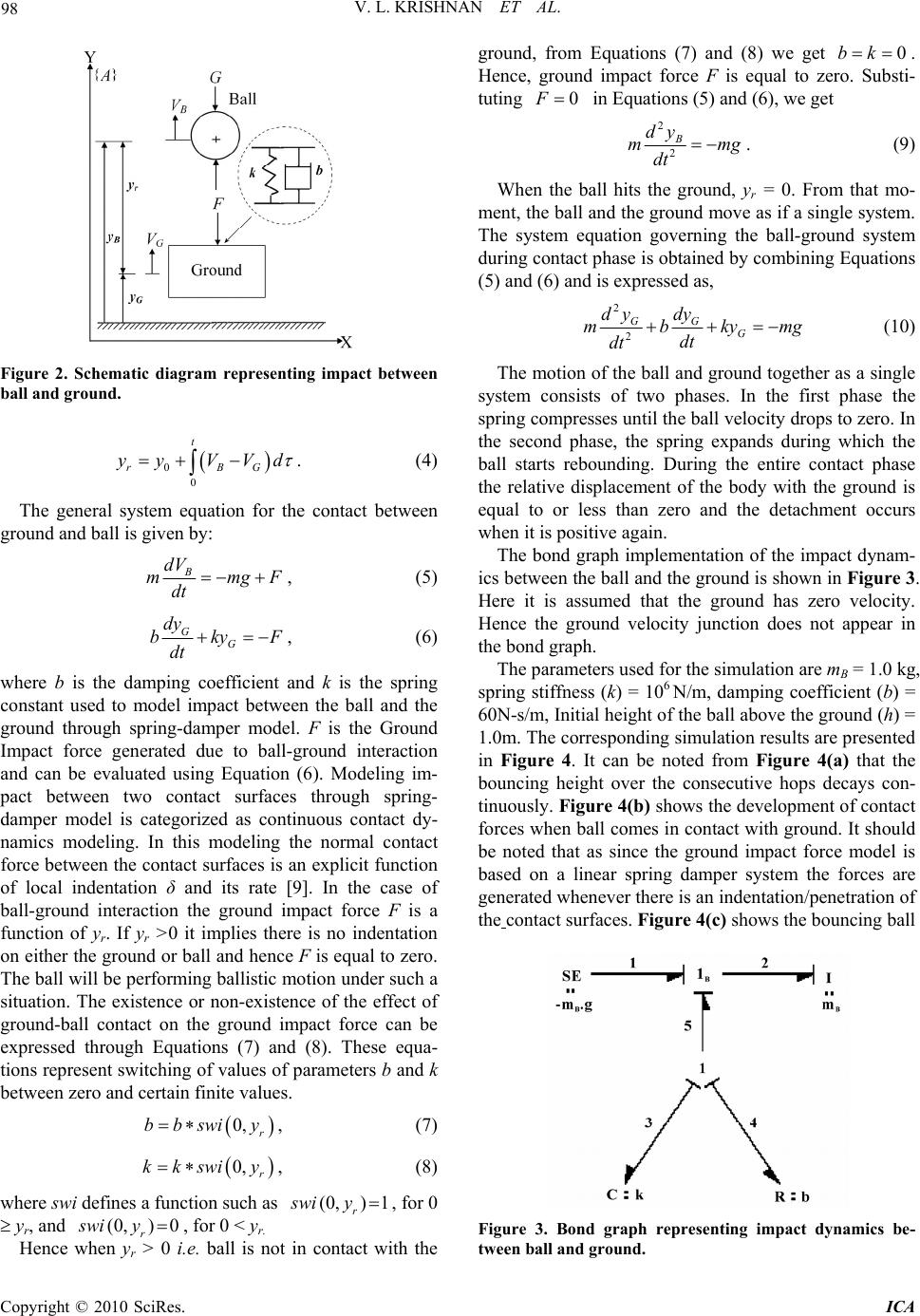 V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 98 Figure 2. Schematic diagram representing impact between ball and ground. 00 t rBG yy VVd . (4) The general system equation for the contact between ground and ball is given by: B dV mmgF dt , (5) G G dy bkyF dt , (6) where b is the damping coefficient and k is the spring constant used to model impact between the ball and the ground through spring-damper model. F is the Ground Impact force generated due to ball-ground interaction and can be evaluated using Equation (6). Modeling im- pact between two contact surfaces through spring- damper model is categorized as continuous contact dy- namics modeling. In this modeling the normal contact force between the contact surfaces is an explicit function of local indentation δ and its rate [9]. In the case of ball-ground interaction the ground impact force F is a function of yr. If yr >0 it implies there is no indentation on either the ground or ball and hence F is equal to zero. The ball will be performing ballistic motio n under such a situation. The existence or non-existence of the effect of ground-ball contact on the ground impact force can be expressed through Equations (7) and (8). These equa- tions represent switching of values of parameters b and k between zero and certain finite values. 0, r bbswi y , (7) 0, r kkswiy , (8) where swi defines a function such as (0,) 1 r swi y , for 0 yr, and (0,) 0 r swiy , for 0 < yr. Hence when yr > 0 i.e. ball is not in contact with the ground, from Equations (7) and (8) we get 0bk . Hence, ground impact force F is equal to zero. Substi- tuting 0F in Equations (5) and (6), we get 2 2 B dy mmg dt . (9) When the ball hits the ground, yr = 0. From that mo- ment, the ball and the gr ound move as if a single system. The system equation governing the ball-ground system during contact phase is obtained by combining Equations (5) and (6) and is exp ressed as, 2 2 GG G dy dy mbkymg dt dt (10) The motion of the ball and ground together as a single system consists of two phases. In the first phase the spring compresses until the ball velocity drops to zero . In the second phase, the spring expands during which the ball starts rebounding. During the entire contact phase the relative displacement of the body with the ground is equal to or less than zero and the detachment occurs when it is positive again. The bond graph implementation of the impact dynam- ics between the ball and the ground is shown in Figure 3. Here it is assumed that the ground has zero velocity. Hence the ground velocity junction does not appear in the bond graph. The parameters used for the simulation are mB = 1.0 kg, spring stiffness (k) = 106 N/m, damping coefficient (b) = 60N-s/m, Initial height of the ball above the ground (h) = 1.0m. The corresponding simulation resu lts are presented in Figure 4. It can be noted from Figure 4(a) that the bouncing height over the consecutive hops decays con- tinuously. Figure 4(b) shows the development of contact forces when ball comes in contact with ground. It should be noted that as since the ground impact force model is based on a linear spring damper system the forces are genera ted whenev er th er e is an inde ntation /pen etration of the contact surfaces. Figure 4(c) shows the bouncing ball Figure 3. Bond graph representing impact dynamics be- tween ball and ground. 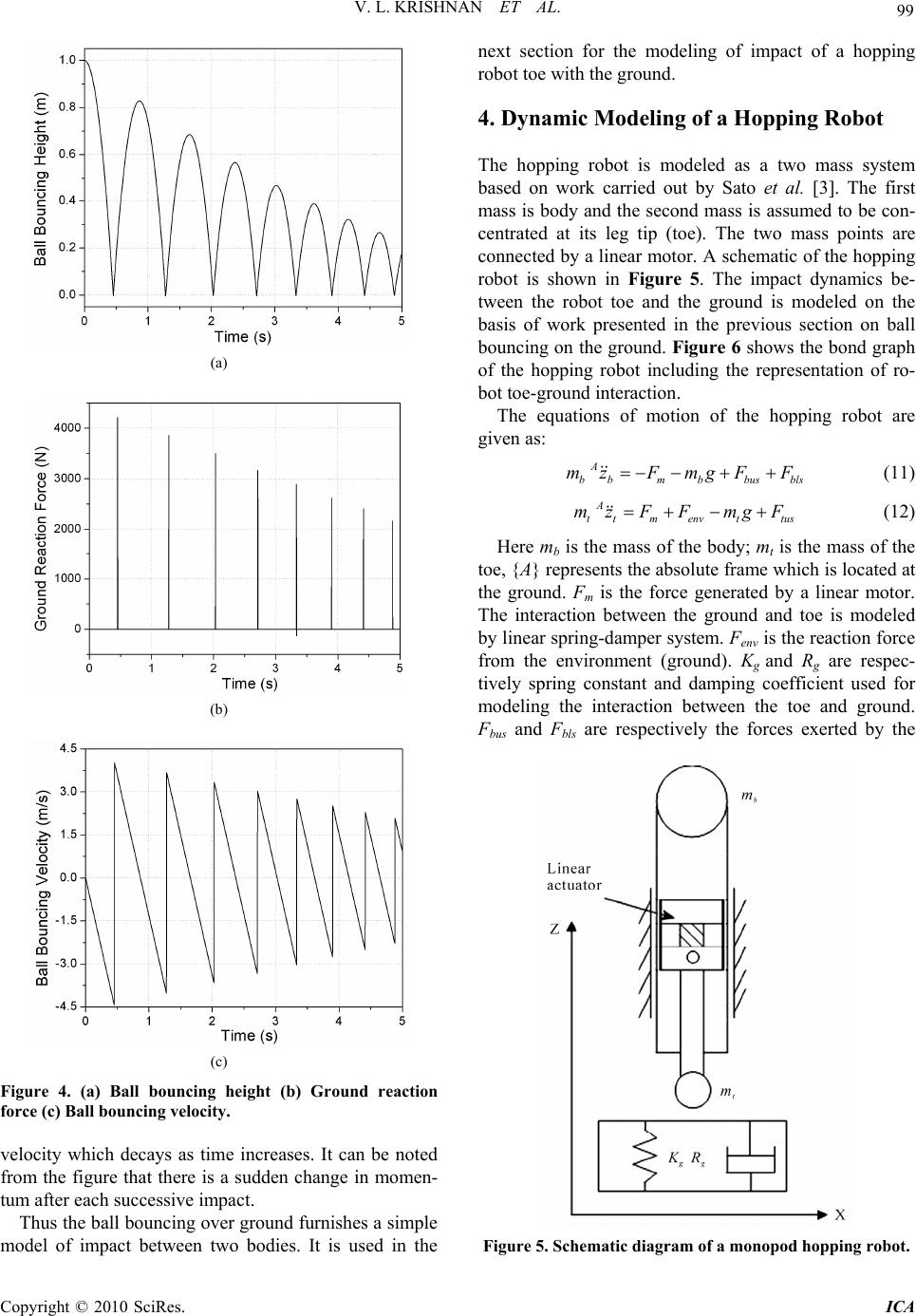 V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 99 (a) (b) (c) Figure 4. (a) Ball bouncing height (b) Ground reaction force (c) Ball bouncing velocity. velocity which decays as time increases. It can be noted from the figure that there is a sudden change in momen- tum after each successive impact. Thus the ball bouncing over ground furnishes a simple model of impact between two bodies. It is used in the next section for the modeling of impact of a hopping robot toe with the ground. 4. Dynamic Modeling of a Hopping Robot The hopping robot is modeled as a two mass system based on work carried out by Sato et al. [3]. The first mass is body and the second mass is assumed to be con- centrated at its leg tip (toe). The two mass points are connected by a linear motor. A schematic of the hopping robot is shown in Figure 5. The impact dynamics be- tween the robot toe and the ground is modeled on the basis of work presented in the previous section on ball bouncing on the groun d. Figure 6 shows the bond graph of the hopping robot including the representation of ro- bot toe-ground interaction. The equations of motion of the hopping robot are given as: A b bmbbusbls mzF mgFF (11) A t tmenvttus mz F FmgF (12) Here mb is the mass of the body; mt is the mass of the toe, {A} represents the absolute frame which is located at the ground. Fm is the force generated by a linear motor. The interaction between the ground and toe is modeled by linear spring-damper system. Fenv is the reaction force from the environment (ground). Kg and Rg are respec- tively spring constant and damping coefficient used for modeling the interaction between the toe and ground. Fbus and Fbls are respectively the forces exerted by the Figure 5. Schematic diagram of a monopod hopping robot.  V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 100 Figure 6. Bond graph model of interaction of a monopod hopping robot with the ground. upper and lower limiters on the hopping robot body. Similarly Ftus is the force applied by the upper limiter on robot toe. The interaction between th e respective limiters and robot body or toe is also modeled by a linear spring-damper system. Corresponding spring constant and damping coefficient values are same as that consid- ered for toe-ground interaction . Considering hard ground, the spring constant and damping coefficient values have been adopted from [3]. The hopping robot system pa- rameters are listed in Table 1. The phases and events of a typical hopping cycle are presented in the Table 2. Figure 7 shows the various phases of the cycle. In the next section, an impedance controller is de- signed along with the hopping robot system to attain the desired control of impact forces. Table 1. Hopping robot parameters. Parameters Sym- bol Value Body mass mb 1.3 kg Leg Mass mt 1.0 kg Spring coefficient used to model impact between the leg tip and the groun d Kg 10000 N/m Damping coefficient used to model im - pact between the leg tip and the ground Rg 40 N-s/m Body Length Lb 0.5 m Upper limit of body motion Zbus 1.5 m Lower limit of body motion Zbls 0.2 m Upper limit of T oe motion Ztus 1.3 m Table 2. Hopping cycle. Event Top Body CG is highest Touchdown Leg Tip touches ground Bottom Body CG is lowest Liftoff Leg Tip leaves ground Phase Stance From touchdown to liftoff Landing From touchdown to bottom Thrusting From bottom to liftoff Aerial From liftoff to touchdown 5. Impedance Control of the Hopping Robot The impedance of a system at an interaction port is de- fined as the ratio between the output effort and the input flow. For applications, demanding a robotic controller to achieve balance between the two characteristics viz. ro- bust trajectory tracking and accommodation of environ- mental disturbances, the impedance control strategy [6] is best suited. The impedance control strategy, with regard to the problem under consideration, is based on the body mo- tion compensation. The body motion compensation is so designed that the hopping robot impedance can be modu- lated to limit the forces of interaction between hopping robot toe and groun d. The control paradigm establish es a 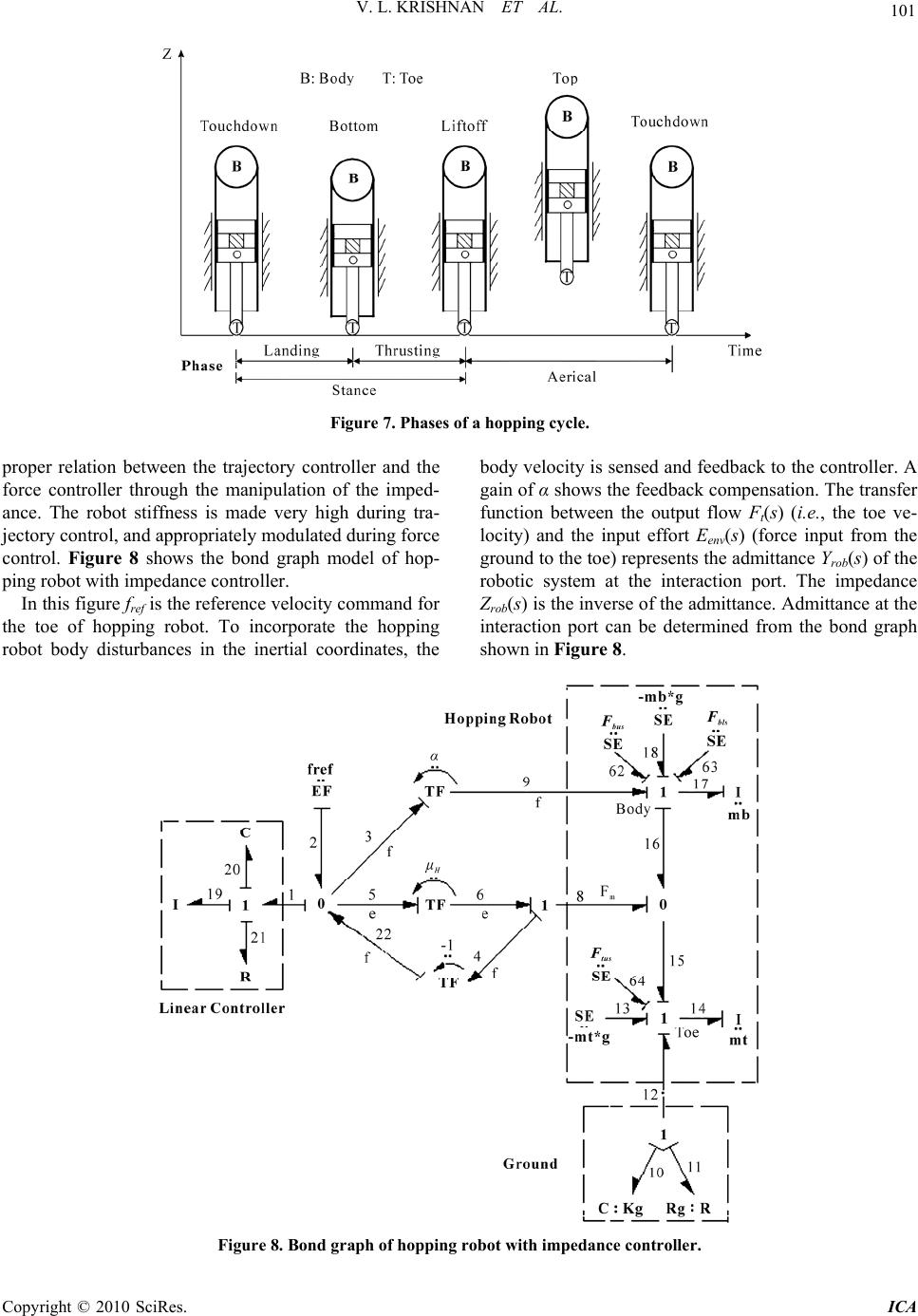 V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 101 Figure 7. Phases of a hopping cycle. proper relation between the trajectory controller and the force controller through the manipulation of the imped- ance. The robot stiffness is made very high during tra- jectory control, and appropriately modulated during force control. Figure 8 shows the bond graph model of hop- ping robot with impedance controller. In this figure fref is the reference velo city command for the toe of hopping robot. To incorporate the hopping robot body disturbances in the inertial coordinates, the body velocity is sensed and feedback to the controller. A gain of α shows the feedback compensation. The transfer function between the output flow Ft(s) (i.e., the toe ve- locity) and the input effort Eenv(s) (force input from the ground to the toe) represents the ad mittance Yrob(s) of the robotic system at the interaction port. The impedance Zrob(s) is the inverse of the admittance. Admittance at the interaction port can be determined from the bond graph shown in Figure 8. Figure 8. Bond graph of hopping robot with impedance controller.  V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 102 The body and toe weights are not considered in this analysis as they can be treated separately as the distur- bance force. Now, applying the constitutive law at junctio n ‘1’ cor- responding to robot toe, we obtain 1214 15 etet et, Taking Laplace transform on both sides of above ex- pression, we obtain 1214 15 EsEs Es, (13) Transfer function of hopping robot toe can be ex- pressed as 1414 14tt Es MsFsFsPs . (14) Constitutive law at junction ‘1’, corresponding to the controller is given by: 1192021 etet et et. Taking Laplace transform on both sides, we get 2 11 1ccc EsFsCsFsMsRs Ks , (15) where, Mc, Rc and Kc are respectively the inertia (differ- ential gain), resistance (proportional gain) and stiffness (integral gain) of the controller. From the bond graph, using constitu ent laws of junctions it can be ob tained 15 1H Es Es , (16) where H is the high feed-forward gain. Next 1() F s can be determined by writing the constitu ent law at junc- tion ‘0’ (one which is supplying flow input to controller): 12322 0ftftftft, Since reference trajectory is not considered for evalua- tion of admittance at the interaction port, 1322 f tftft . (17) Substituting corresponding values and taking Laplace transform 11714 1 F sFsFs . (18) Substituting 1() F s from Equation (18) into Equation (16) 1517 14 1 H EsCsFs Fs . (19) Also 17 1717bb F sEsMsPsEs, (20) where Pb(s) is the transfer function of hopping robot body. Applying constitutive law at Junction ‘0’ (corre- sponding to motor torque Fm) and at Junction ‘1’ (corre- sponding to robot toe), we obtain 171512 14 EsEsEs Es. (21) Substituting E17(s) from Equation (21) in Equation (20), we get 1712 14b F sPsEsEs . (22) Combining Equation (13), Equation (14), Equation (19) and Equation (22), we obtain 12 14 12 1414 1/ tH bt Es FsPsCs PsEs FsPsFs . (23) Simplifying the above equation we get, 12 14 11 11 Hb b HH tt EsCs Ps Ps F sCsCs Ps Ps . As since Admittance at the interaction port between hopping robot toe and ground is defined as, 14 12 1t rob rob env F sFs Ys Z sEsEs Admittance or impedance at the interaction port is rep- resented as 11 11 tH b rob Ht Hb PsCs Ps Ys CsPsCsP s . (24) Equation (24) indicates two distinct behavior of the sys- tem. 1) When α = 1, and μH >> 1, Yrob(s) = 1/Zrob(s) = 1/(μH C(s)), i.e., toe trajectory is not disturbed by either toe or body inertia so toe can follow th e commanded trajectory. 2) When α < 1, modulation of the impedance to ac- commodate the interaction forces is possible. Table 3. Controller parameters. Parameters Symbol Value Effort amplifier gain μH 4 Controller Proportional gain rc 100 Controller Derivative gain mc 0.001 Controller Integra l g a i n Kc 2000 Limiting Force Flim 60 N Gain (Initial Biasing) Kini 0.00 Proportional Gain KGP 0.0004 Integral Gain KGI 0.0002 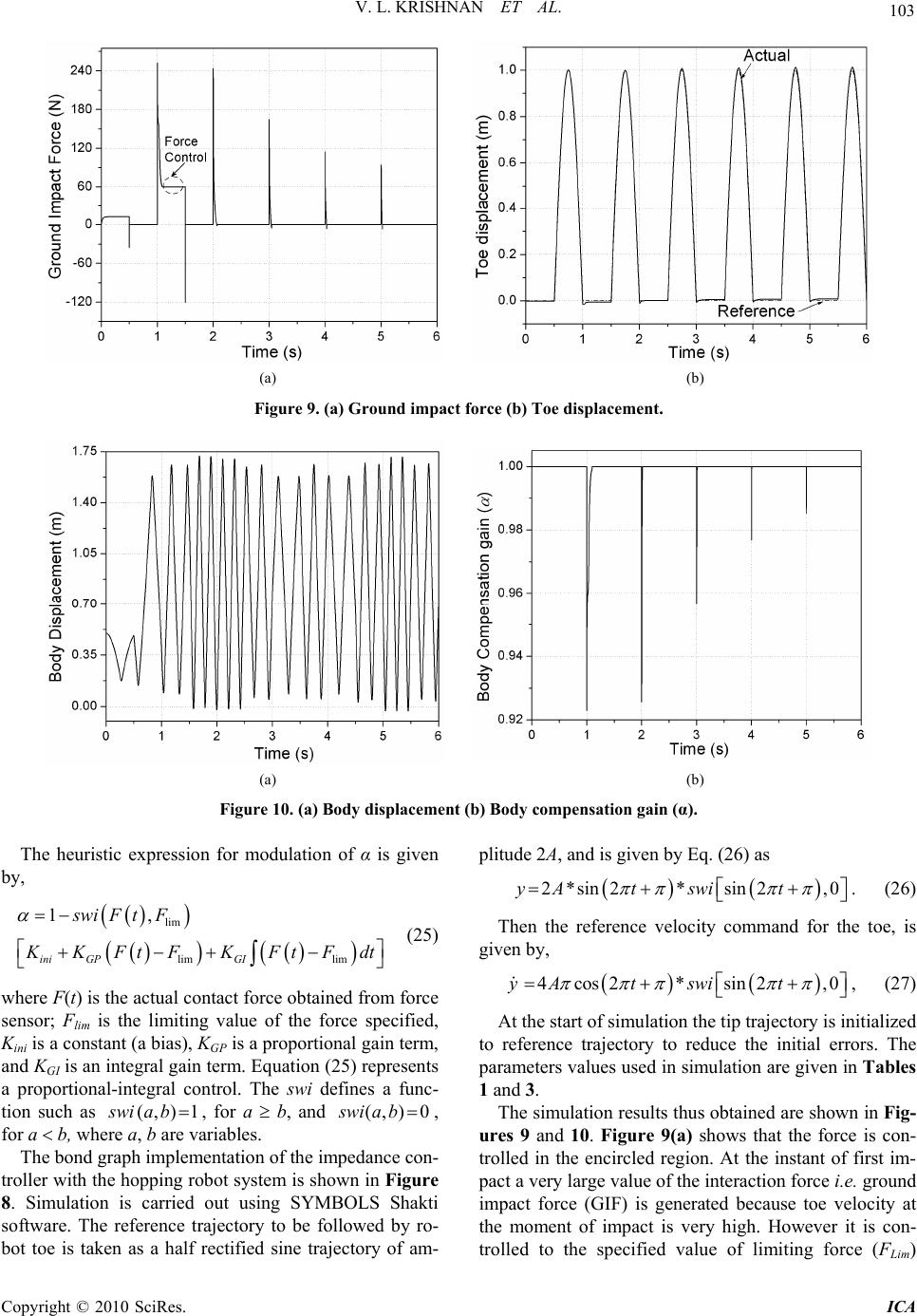 V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 103 (a) (b) Figure 9. (a) Ground impact force (b) Toe displacement. (a) (b) Figure 10. (a) Body displacement (b) Body compensation gain (α). The heuristic expression for modulation of α is given by, lim lim lim 1, ini GPGI swi F tF K K FtFKFtFdt (25) where F(t) is the actual contact force obtained from force sensor; Flim is the limiting value of the force specified, Kini is a constant (a bias), KGP is a proportional gain term, and KGI is an integral gain term. Equation (25) represents a proportional-integral control. The swi defines a func- tion such as (,)1swia b, for a b, and (,)0swi a b , for a b, where a, b are variables. The bond graph implementation of the impedance con- troller with the hopping robot system is shown in Figure 8. Simulation is carried out using SYMBOLS Shakti software. The reference trajectory to be followed by ro- bot toe is taken as a half rectified sine trajectory of am- plitude 2A, and is given by Eq. (26) as 2*sin2* sin2,0yAt swit . (26) Then the reference velocity command for the toe, is given by, 4cos2* sin2,0yAtswit , (27) At the start of simulation the tip trajectory is initialized to reference trajectory to reduce the initial errors. The parameters values used in simulation are given in Tables 1 and 3. The simulation results thus obtained are shown in Fig- ures 9 and 10. Figure 9(a) shows that the force is con- trolled in the encircled region. At the instant of first im- pact a very large value of the interaction force i.e. ground impact force (GIF) is generated because toe velocity at the moment of impact is very high. However it is con- trolled to the specified value of limiting force (FLim)  V. L. KRISHNAN ET AL. Copyright © 2010 SciRes. ICA 104 equal to 60N subsequently. It can be noted that negative peaks of GIF is produced at the beginning of first and second hops. It is due to the change in momentum at the instance of thrusting for next hop by the hopping robot. In subsequent hops the momentum change is of very small value. It is obvious in Figure 9(b) that the robot toe follows reference trajectory very closely. It is inter- esting to note that th e hopping robot is hopping to a con- stant height continuously for several cycles. Figure 10(a) shows that the body displacement in the vertical direction is constrained by the upper and lower limiters incorporated into the hopping robot model. Fig- ure 10(b) presents the variation of body compensation gain (α) with respect to time. It varies in order to ac- commodate the interaction forces generated between the robot toe and ground as shown in Figure 9(a). 6. Conclusions In this paper, impedance control strategy has been used for controlling the impact forces generated during land- ing phase of the hopp ing cycle for a monopod robot. Us- ing this strategy the forces generated during landing has been limited to a constant value specified to the imped- ance controller. Also along with force control very close tracking of leg toe reference trajectory has been attained. This work thus demonstrates the successful realization of impedance control strategy for force control in vertical direction at toe ground interaction point of monopod hopping robot. This model and corresponding analysis can be further extended for developing hopping robot response for multi legged hopping robot, forward run- ning at different velocities. 7. References [1] M. H. Raibert, M. A. Chepponis and H. Brown, “Ex- periments in Balance with 3D One-Legged Hopping Ma- chine,” International Journal of Robotics Research, Vol. 3, No. 2, 1984, pp. 75-92. [2] S. H. Hyon and T. Mita, “Development of a Biologically Inspired Hopping Robot-‘Kenken’,” Proceedings of ICRA’02, IEEE International Conference on Robotics and Automation, Washington, DC, 2002, pp. 3984-3991. [3] Y. Sato, E. Ohashi and K. Ohnishi, “Impact Force Reduc- tion for Hopping Robot,” Proceedings of IEEE 31st An- nual Conference of IECON’2005, 6-10 November 2005, pp. 1821-1826. [4] N. Fujii and K. Ohnishi, “Smooth Transition Method from Compliance Control to Position Control for One Legged Hopping Robot,” Proceedings of IEEE Interna- tional Conference on Industrial Technology, ICIT 2006, 15-17 December 2006, pp. 164-169. [5] P. M. Pathak, A. Mukherjee and A. Dasgupta, “Imped- ance Control of Space Robots using Passive Degrees of Freedom in Controller Domain,” ASME Journal of Dy- namic Systems, Measurement and Control, Vol. 127, No. 4, 2005, pp. 564-578. [6] A. Mukherjee, R. Karmarkar and A. K. Samantaray, “Bondgraph in Modeling Simulation and Fault Identifica- tion,” I. K. International Publishing House Pvt. Ltd., New Delhi, 2006. [7] A. Mukherjee, “Users Manual of SYMBOLS Shakti,” High-Tech Consultants, S.T.E.P, Indian Institute of Tech- nology, Kharagpur, 2006. http://www.htcinfo.com/ [8] V. Damic and J. Montgomery, Mechatronics by bond graphs: An Object-Oriented Approach to Modeling and Simulation, Springer-Verlag, Berlin, Heidelberg, 2003. [9] G. Gilardi and I. Sharf, “Literature Survey of Contact Dynamics Modeling”, Mechanism and Machine Theory Vol. 37, No. 10, 2002, pp. 1213-1239. |