Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2010, 2, 869-878 doi:10.4236/wsn.2010.211105 Published Online November 2010 (http://www.SciRP.org/journal/wsn) Copyright © 2010 SciRes. WSN Joint Closed-Loop Power Control and Adaptive Beamforming for Wireless Networks with Antenna Arrays in a 2D Urban Environment Mohamad Dosaranian Moghadam1, Hamidreza Bakhshi2, Gholamreza Dadashzadeh2 1Department of Electrical Engineering, Islamic Azad University, Qazvin Branch, Qazvin, Iran 2Department of Elect r i cal Eng i ne eri n g, Shahed University, Tehran, Iran E-mail: m_dmoghadam@qiau.ac.ir, bakhshi@shah ed.ac.ir, gdadashzadeh@shahed.ac.ir Received July 25, 2010; revised August 31, 2010; accepted October 2, 2010 Abstract The interference reduction capability of antenna arrays and the power control algorithms have been consid- ered separately as means to decreas e the interference in wireless communication networks. In this paper, we propose smart step closed-loop power control (SSPC) algorithm in wireless networks in a 2D urban envi- ronment with constrained least mean squared (CLMS) algorithm. This algorithm is capable of efficiently adapting according to the environment and able to permanently maintain the chosen frequency response in the look direction while minimizing the output power of the array. Also, we present switched-beam (SB) technique for enhancing signal to interference plus noise ratio (SINR) in wireless networks. Also, we study an analytical approach for the evaluation of the impact of power control error (PCE) on wireless networks in a 2D urban environment. The simulation results indicate that the convergence speed of the SSPC algorithm is faster than other algorithms. Also, we observe that significant saving in total transmit power (TTP) are pos- sible with our proposed algorithm. Finally, we discuss three parameters of the PCE, number of antenna ele- ments, and path-loss exponent and their effects on capacity of the system via some computer simulations. Keywords: Adaptive Beamforming, Closed-Loop Power Control, Matched Filter, Urban Signal Propagation Simulator, Power Control Error 1. Introduction Diversity and power control are two effective techniques for enhancing the signal to interference plus noise ratio (SINR) for wireless networks. Diversity exploits the random nature of radio propagation by finding inde- pendent (or, at least, high ly uncorrelated) signal paths for communication. If one radio path undergoes a deep fade, another independent path may have a strong signal. By having more than one path to select from, the SINR at the receiver can be improved. The diversity scheme can be divided into three methods: 1) the space diversity; 2) the time diversity; 3) the frequency diversity. In these schemes, the same information is first received (or trans- mitted) at different locations (or time slots/frequency bands). After that, these signals are combined to increase the received SINR. The antenna array is an example of the space diversity, which uses a beamformer to increase the SINR for a particular direction [1]. Accordingly, the use of smart antennas is expected to have a significant impact on future wireless communications to meet the projected perspective of future communication networks. A major reason to use smart antenna in wireless commu- nication is its capability to intelligently respond to the unknown interference environment in real time. The process of formation of nulls in the direction of interfer- ence and strong beams in the direction of desired user is called adaptive array processing. These systems are called adaptive beamforming system and consist of spatially disposed sensor elements connected to a single channel or to a multi channel ad aptive processor. The term adap- tive beamforming is also referred as smart antennas. Adaptive antenna array can be used to eliminate the di- rectional interference by adaptive canceling and there- fore to improve the SINR. Steering capability o f ad aptiv e array depends on processing algorithms for null steering. Such algorithms are called adaptive algorithm. In wire- less communications, smart antennas are used due to  M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 870 their ability to separate the desired signal from interfer- ing signals. By knowing the direction of the desired sig- nals, they are able to adjust the antenna pattern intelli- gently by adjustin g the weights of the adaptiv e algorithm [2-4]. On the other hand, power control can be realized by allocating different power levels to the links with differ- ent link gains. For example, links with smaller links gains are supposed to have larger power levels. This lar- ger power level may cause more interference to other users. Therefore, adequate power control is needed to meet the SINR requirement while minimizing the power consumption and increasing the capacity in all network. In general, two types of power control are often consid- ered. 1) Closed-loop power control 2) Open-loop power control [2,3]. In a closed-loop power control, according to the received signal power at a base station (BS), the base station sends a command to a mobile set to adjust the transmit power of the mobile. Also, closed-loop power control is employed to combat fast channel fluc- tuations due to fading. Closed-loop algorithms can effec- tively compensate fading variations when the power control updating time is smaller th an the correlation time of the channel. However, in an open-loop power control, a mobile user adjusts its transmit power according to its received power in downlink [1-6]. The first goal of this paper is to extend our work in [7,8] by considering closed-loop power control and power control error (PCE). In [7], a constrained least mean squared (CLMS) algorithm was used for tracking mobile user in a 2D urban environment without power control algorithm. Also in [8], we proposed the SSPC algorithm in wireless network by the CLMS algorithm without considering the effect of PCE in 2D urban envi- ronment. Accordingly, in this paper we present smart step closed-loop power control (SSPC) algorithm for minimizing the total transmit power (TTP) in wireless networks [9]. On the other hand, the issue of the effect of power control errors on wireless networks has received a great deal of attention over the last few years [2,3]. Fi- nally, we consider the effect of PCE on wireless net- works in a 2D urban environment [10]. The organization of the remainder of this paper is as follows. In Section 2, propagation model in a 2D urban environment and also functional state of urban signal propagation simulator (USPS) are described. Section 3 considers the adaptive antenna array. The CLMS algo- rithm is summarized in Section 4. In Section 5, we pre- sent the SSPC algorithm. Then in Section 6, we extend the analysis to the case of PCE on wireless networks. Section 7 presents switched-beam (SB) technique and equal sectoring (ES) method. Finally, simulation results and conclusions are given in Sections 8 and 9. 2. Propagation Model Because of using 2D urban structure in reverse link (up- link) in this work, for computing yield for path between a user and BS, propagation model in urban environments are dramatized. In propagation model in urban environ- ments and in reverse link, user antenna is radiating beams which are diffusing in all directions and parts of beams reach to BS. In urban environment, delivered beam from user by the time of collision to an obstacle like a wall surface or a building, reflects to a new angle and continues its path, this is called reflection phenomena. In condition when radiated beam is conflicted to a obstacle edge then dif- fraction phenomena is happened and diffracting point is diffusing new beams to all directions like a transmitter. All reflected beams, will stay in the environment till the time their power are not reduced to a threshold limit. Figure 1 shows both phenomena in reverse link. In this work, USPS dramatizing is used for implementing a 2D urban environment [7,11]. According to above dramatization, we could see be- cause of line of sight (LoS) in un-urban environment, only one signal is delivered from each user to receiver, while in function and because of elimination phenomena in an urban environment, beside to signals which are delivered to line sight, signals which have difference in phase or domain with this signal are also received by receiver. 3. Adaptive Antenna Array An adaptive antenna array consists of a set of antennas, designed to receive signals radiating from some specific directions and attenuate signals radiating from other di- rections of no interest. The outputs of array elements are weighted and added by a beamformer, as shown in Fig- ure 2, to produce a directed main beam and adjustable Figure 1. Diffraction phenomena and reflection phenomena (LoS and Non-LoS paths) for a 2D urban environment in reverse link. 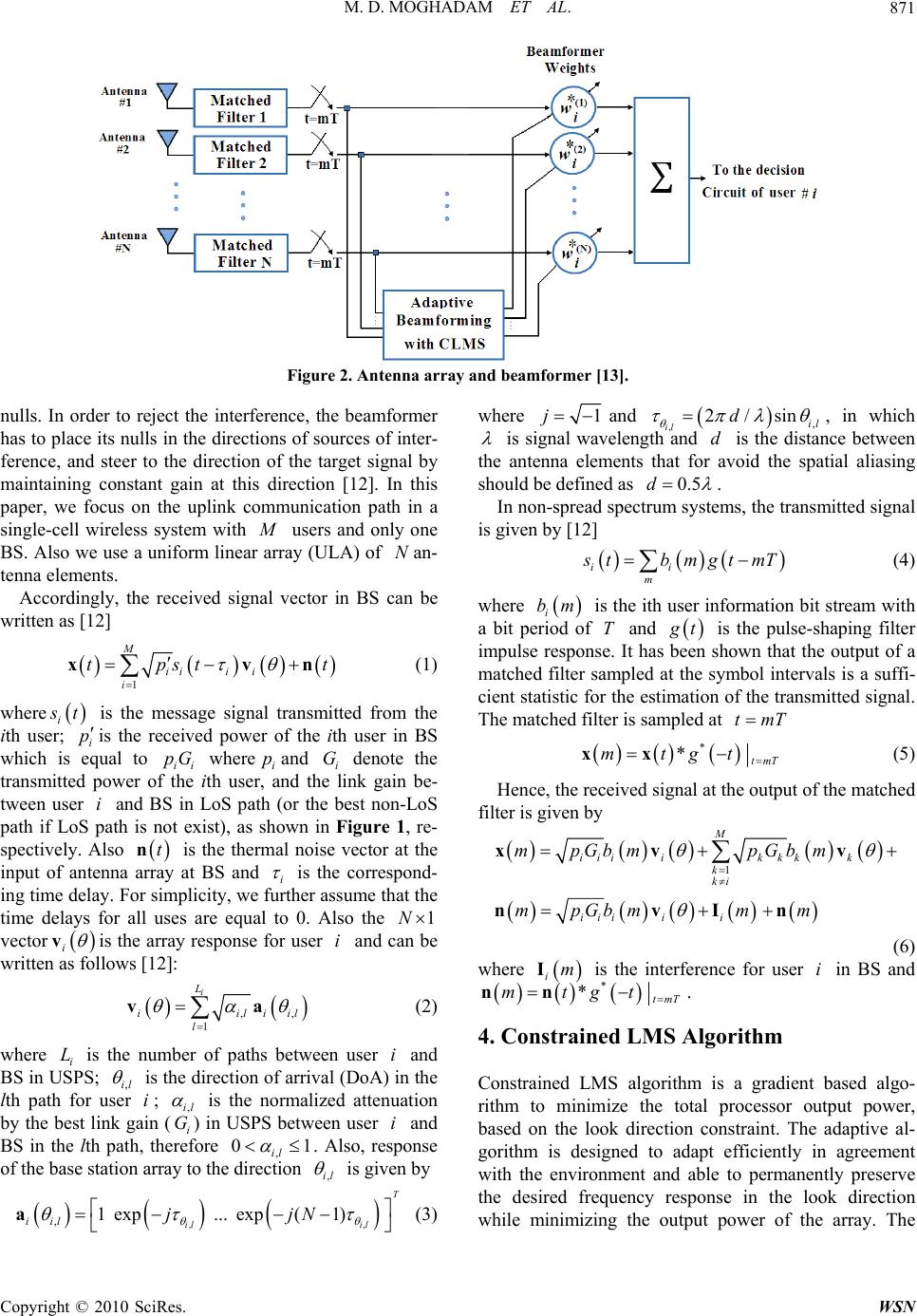 M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 871 Figure 2. Antenna array and beamformer [13]. nulls. In order to reject the interference, the beamformer has to place its nulls in the directions of sources of inter- ference, and steer to the direction of the target signal by maintaining constant gain at this direction [12]. In this paper, we focus on the uplink communication path in a single-cell wireless system with M users and only one BS. Also we use a unifor m li near array (ULA) of Nan- tenna elements. Accordingly, the received signal vector in BS can be written as [12] 1 M iii i i tpst t xvn (1) where i s t is the message signal transmitted from the ith user; i pis the received power of the ith user in BS which is equal to ii pG wherei pand i G denote the transmitted power of the ith user, and the link gain be- tween user i and BS in LoS path (or the best non-LoS path if LoS path is not exist), as shown in Figure 1, re- spectively. Also tn is the thermal noise vector at the input of antenna array at BS and i is the correspond- ing time delay. For simplicity, we further assume that the time delays for all uses are equal to 0. Also the 1N vector i vis the array response for user i and can be written as follows [12]: ,, 1 i L iiliil l va (2) where i L is the number of paths between user i and BS in USPS; ,il is the direction of arrival (DoA) in the lth path for user i; ,il is the normalized attenuation by the best link gain (i G) in USPS between user i and BS in the lth path, therefore , 01 il . Also, response of the base station array to the direction ,il is given by ,, ,1exp...exp ( 1)T il il iil jjN a (3) where 1j and ,, 2/sin il il d , in which is signal wavelength and d is the distance between the antenna elements that for avoid the spatial aliasing should be defined as 0.5d . In non-spread spectrum systems, the transmitted signal is given by [12] ii m s tbmgtmT (4) where i bm is the ith user information bit stream with a bit period of T and g t is the pulse-shaping filter impulse response. It has been shown that the output of a matched filter sampled at the symbol intervals is a suffi- cient statistic for the estimation of the transmitted signal. The matched filter is sampled at tmT * *tmT mtgt xx (5) Hence, the received signal at the output of the matched filter is given by 1 M iii ikkkk k ki iii ii mpGbm pGbm mpGbmm m xv v nvIn (6) where imI is the interference for user i in BS and * *tmT mtgt nn . 4. Constrained LMS Algorithm Constrained LMS algorithm is a gradient based algo- rithm to minimize the total processor output power, based on the look direction constraint. The adaptive al- gorithm is designed to adapt efficiently in agreement with the environment and able to permanently preserve the desired frequency response in the look direction while minimizing the output power of the array. The  M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 872 combined form of the constraint is called constraint for narrowband beamforming [12 -1 4] . This form consider a narrowband beamformer where the narrowband signal from each element of smart an- tenna are multiplied by the complex weight calculated by using narrowband adaptive beamforming algorithm, and then summed to produce the output of the array. The definition of the complex weights of this beamformer in the mth iteration for the ith user is as follows [13-15]: (1)(2)( ) ... T N iii i mwmwmwm w (7) Accordingly, the output of the array in the mth itera- tion for user i is given by mmmy H ii xw (8) The expected output power of the array in the mth it- eration is given by 2* EE E iii HH H iiixxi ym ymym mmmmmm wxxwwRw (9) where E. is denoted the expectation and x x R is the correlation matrix of the received signal vector mx. A real-time CLMS algorithm for determining the op- timal weight vector for user i is [13,14]: max ,g 1 1 ii i H ii i mmgm ww w wa (10) where max ,gii a denotes spatial response of the array for user i in the best path gain, i.e.,,1 il , and 1 imw is the new weight computed at the 1m th iteration for user i. Also, the variable scalar de- notes a positive scalar (gradient step size) that controls the convergence characteristic of the algorithm, that is, how fast and how close the estimated weights approach the optimal weights, and i g mw denotes an unbi- ased estimate of the gradient of the power surface ( H ixxi mmwRwwhich is the expected output power of the array) with respect to imw after the mth itera- tion. The algorithm is “constrained” because the weight vector satisfies the constraint at each iteration, that is max ,1 H ii ig wa . Rewrite the CLMS algorithm as fol- lows [14]. max , 1iig iii i mmgm N a wβww (11) where max max ,, H iig iig iN aa βI (12) The gradient of H ixxi mmwRw with respect to imw is give n by *2 H iixxixxi i g mmmm ww RwRw w (13) and its computation using this expression requires knowledge of x x R, which normally is not available in practice. For a standard LMS algorithm, an estimate of the gradient at each iteration is made by replacing x x R by its noise sample 11 H ii mmxx available at time instant 1m , leading to * 21 iii g mmym wx (14) The CLMS is a fast convergence algorithm. However, it is drastically sensitive to the mismatch in the direction of arrival. Meanwhile, the weights estimated by the stan- dard algorithm are sensitive to the signal power, requir- ing a lower step size in the presence of a strong signal for the algorithm to converge, which in turn regarding the decrease of mis-adjustment error, the convergence time is increased [14-16]. Consider the problem of beamforming as to maximize the SINR for a specific link, which is equivalent to minimizing the interference at the receiver of that link. In order to minimize the variance or average power at the output of the beamformer subject to maintaining unity gain at the direction of the mobile user signal. Accord- ingly, we can rewrite the average output power for user ias [12] ˆˆ H iixxi wRw (15) where ˆi w is the optimum weight vector for user i with CLMS algorithm. If the message signals i s t are uncorrelated and zero mean, the correlation matrix x x R is given by 2 1 M HH xxii iikkkkn k ki H iii ii pG pG pG Rvvvv I vv Φ (16) where 2 1 M H ikkkk n k ki pG Φvv I (17) is the correlation matrix of unwanted signals for user i in BS, and 2 n is the noise power at the input of each array element. Combining (15)-(17), we obtain the received signal plus interference power as a function of weight vector 2 1 2 ˆˆˆ ˆˆ M HHH iiiiikkik ki k ki H ni i pG pG wvwv vw ww (18)  M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 873 Accordingly, the SINR at BS for user i can be writ- ten as follows [12]. 2 22 1 ˆ ˆ SINR ,ˆˆˆ H iii i iMHH kkikn ii k ki pG pG wv wv wv ww (19) In order to perform the bit error rate (BER), we as- sume Gaussian approximation for the probability density function of interference plus noise. The conditional BER for a BPSK modulation is [17]: ˆˆ BER,2 SINR, ii Q wvwv (20) where 2 1exp/2 2x Qxu du (21) It should be mentioned that for the array antenna weight vector elements in the CLMS algorithm and for big , will converge after a few iteration (is approxi- mately equal to the number of beamformer weights, i.e.,mN) [7,16]. Moreover it is obvious that, without power control algorithm, the calculated optimal weight vector does not guarantee desirable SINR for the mobile user. Thus, we introduce our proposed algorithm in next section. 5. Smart Step Closed-Loop Power Control Algorithm A major limiting factor for the satisfactory performance of cellular systems is the near-far effect. Power control is an intelligent way of adjusting the transmitted powers in cellular systems so that the TTP is minimized, but at the same time, the user SINRs satisfies the system quality of service (QoS) requirements, [18,19]. Depending on the location where the decision on how to adjust the transmitted powers is made, the po wer con- trol algorithms can be divided into two groups: central- ized and distributed techniques [1-6,12]. In centralized power control, a network center can simultaneously com- pute the optimal power levels for all users. However, it requires measurement of all the link gains and the com- munication overhead between a network center and base stations. Thus, it is difficult to realize in a large system [20]. Distributed power control, on the other hand, uses only local information to determine transmitter power levels. It is much more scalable than centralized power control. However, transmitter power levels may not be optimal, resulting in performance degradation [21,22]. The distributed closed-loop power control problem has been investigated by many researchers from many per- spectives during recent years [5,18,21-23]. For instance, distributed conventional closed-loop power control st r a t eg y used in practice in wireless cellular syste ms as code divi- sion multiple access (CDMA) is a fixed-step controller based on SINR measurements. The fixed-step power con- trol (FSPC) algorithm is defined by [5] 1* sign nn n ii ii pp (22) Where n i p, * i andn i are the transmitter power, SINR target and measured SINR of user i at time n, respectively, and is the fixed step size. Also 1n i p is transmitter power control (TPC) command in the feed- back link of BS to user i at time 1n (all signals are in decibels). Also, the distributed traditional closed-loop power control (DTPC) is defined by [18] * 1nn i ii n i pp (23) In both algorithms, the simple intuition behind this it- eration is that if the current SINR n i of user i is less than the target SINR* i , then the power of that user is increased; otherwise, it is decreased. It should be mentioned that convergence speed of DTPC algorithm is higher than FSPC algorithm. Also, the variance of the SINR mis-adjustment in FSPC algo- rithm is higher than DTPC algorithm. But, it has been shown that the FSPC algorithm converges to *2 n ii d k , where d k is the loop delay [4]. Also in [23], variable step closed-loop power control (VSPC) algorithm has been proposed. In this algorithm, variable step size is discrete with mode q. It is shown that the performance of VSPC algorithm with mode q = 4 is found to be worse than that of a fixed step algorithm (q = 1) under practical situations with loop delay of two power control intervals, but the convergence speed of VSPC algorithm is higher than FSPC algorithm. Also in this algorithm, the variance of the SINR mis-adjustment is reduced in compared to FSPC algorithm. Practical implementations of power control in the CDMA cellular systems utilize closed-loop control, where the transmitter adjusts its power based on commands received from the receiver in a feedback channel. To minimize signaling overhead, typically one bit is used for the power control command. In practice, the command must be derived based on measurements made at the re- ceiver, transmitted over the feedback channel to the transmitter, and finally processed and applied at the transmitter. All these operations constitute a loop delay, which can cause problems if it is not properly taken care of in the design of the power control algorithm. In many cases the loop delay is known due to a specific frame structure inherent in the system. A typical loop delay situation encountered in WCDMA systems is shown in 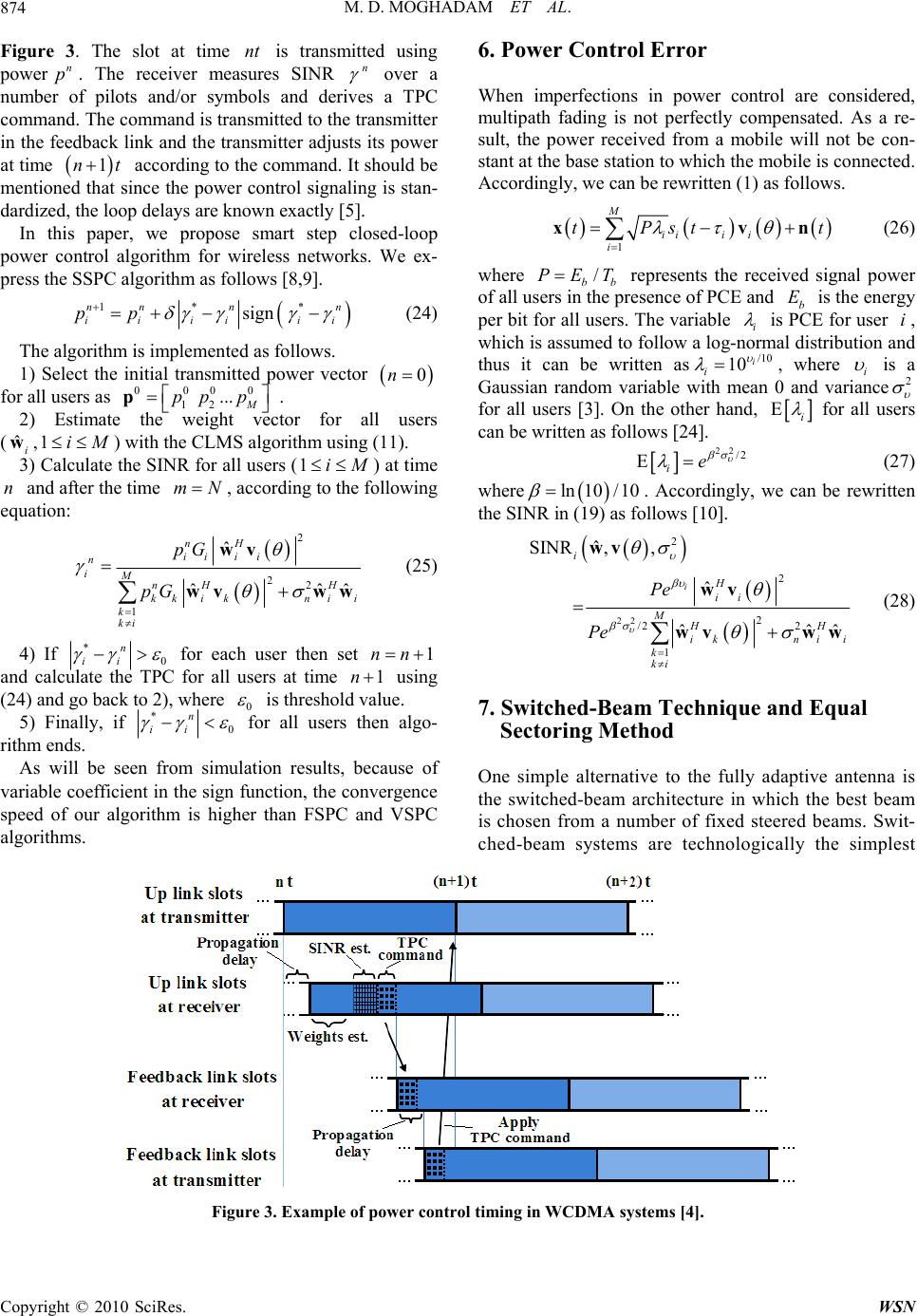 M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 874 Figure 3. The slot at time nt is transmitted using power n p. The receiver measures SINR n over a number of pilots and/or symbols and derives a TPC command. The co mmand is transmitted to the transmitter in the feedback lin k and the transmitter adjusts its power at time 1nt according to the command. It should be mentioned that since the power control signaling is stan- dardized, the loop de lays are known exactly [5]. In this paper, we propose smart step closed-loop power control algorithm for wireless networks. We ex- press the SSPC algorithm as follows [8,9]. 1** sign nn nn iiiiii pp (24) The algorithm is implemented as follows. 1) Select the initial transmitted power vector 0n for all users as 0000 12 ... M pp p p. 2) Estimate the weight vector for all users (ˆi w,1iM ) with the CLMS algorithm using (11). 3) Calculate the SINR for all users (1iM ) at time n and after the time mN, according to the following equation: 2 22 1 ˆ ˆˆˆ nH ii ii n iMnHH kkiknii k ki pG pG wv wv ww (25) 4) If *0 n ii for each user then set 1nn and calculate the TPC for all users at time 1n using (24) and go back to 2), where 0 is threshold value. 5) Finally, if *0 n ii for all users then algo- rithm ends. As will be seen from simulation results, because of variable coefficient in th e sign function, the converg ence speed of our algorithm is higher than FSPC and VSPC algorithms. 6. Power Control Error When imperfections in power control are considered, multipath fading is not perfectly compensated. As a re- sult, the power received from a mobile will not be con- stant at the base station to which the mobile is co nn ected. Accordingly, we can be rewritten (1) as follows. 1 M iii i i tPst t xvn (26) where / bb PET represents the received signal power of all users in the presence of PCE and b E is the energ y per bit for all users. The variable i is PCE for user i, which is assumed to follow a log-normal distribu tion and thus it can be written as/10 10 i i , where i is a Gaussian random variable with mean 0 and variance2 for all users [3]. On the other hand, Ei for all users can be written as follows [24]. 22 /2 Eie (27) where ln 10/10 . Accordingly, we can be rewritten the SINR in (19) as follows [10]. 22 2 2 2 /2 2 1 ˆ SINR ,, ˆ ˆˆˆ i i H ii MHH ikni i k ki Pe Pe wv wv wv ww (28) 7. Switched-Beam Technique and Equal Sectoring Method One simple alternative to the fully adaptive antenna is the switched-beam architecture in which the best beam is chosen from a number of fixed steered beams. Swit- ched-beam systems are technologically the simplest Figure 3. Example of power control timing in WCDMA systems [4].  M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 875 and can be implemented by using a number of fixed, independent, or directional antennas [25]. We list the conditions of the SB technique for this paper as follows [11]. 1) According to Figure 4, beams coverage angle is 30and overlap between consecutive beams is 20. Thus each base station has 36 beams. 2) According to Figure 5, each user can be use one beam for its each path to communicate with a base sta- tion at any time. One simple method to sectorize a cell is equal sector- ing; in which all sectors have the same coverage angle. In this paper, we assume three sectors for each base sta- tion with sector angle 120 for the ES method [26]. 8. Simulation Results In this section, we evaluate the performance of our algo- rithm by simulating the same system as in [7] with CLMS algorithm, SB technique, and ES method. For this purpose, we use part of two-dimensional map of the University of Toronto campus area in Canada as shown in Figure 6 [7]. According to this figure, we observe beside desired user, 1 M interference users in a stable positioning situation with uniform distribution are also Figure 4. 36 beams in BS with the SB technique. Figure 5. Select of beam for two users in two different paths with the SB technique. sending information to BS equipped to an array antenna in reverse link. According to the description in Section 2, sending information by all users to BS is performed by dramatizer USPS. Also note that the variance of the noise (2 n ) for every element is assumed to be equal to 0.01; resolution and path loss in USPS R = 1 and 0.05dB/mL , respectively; gradient step size in the CLMS algorithm 0.005 ; fixed step size for SSPC, FSPC, and VSPC algorithms 0.05 ; mode 4q for VSPC algorithm [23]; threshold value in SSPC algo- rithm 00.1 dB ; number of elements antenna array 10N ; initial value for transmitted power vector for all users 00 p; and the SINR target value is the same for all users and is set to *89dB . It also is assumed that the distribution of users is uniform. Figure 7 shows the comparison of the average SINR achieved over 15M users versus the power control iteration index (n) for SSPC, VSPC (4q), and FSPC algorithms and CLMS, SB, and ES techniques. Also in this simulation, we assume that each user to have a maximum power constraint of 1watt. It should be men- tioned that in case of without power control (PC), the transmitted power for all users is 1 watt [7]. Accordingly, we observe that the convergence speed of the SSPC al- Figure 6. Two-dimensional map of the University of To- ronto campus area and placing users and base station con- tain array antenna in map center [7]. Figure 7. Average SINR of all users versus power control iteration index (n), with maximum power constraint of 1W.  M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 876 gorithm is faster than the VSPC and FSPC algorithms. For example, the SSPC algorithm (for CLMS algorithm) converges in about eight iterations, while VSPC and FSPC algorithms converge in about 11 and 16 iterations, respectively. Also this figure shows that the SSPC algo- rithm with SB technique converges faster than CLMS and ES methods. Also we observe that the SINR level achieved is below the target SINR value for ES method, because in this case the interference is higher than the other methods. Figure 8 shows the comparison of TTP usage versus the power control iteration index (n), as Figure 7. But in this simulation, we assume that users no have maxi- mum power constraints. Similar to Figure 7, we observe that the ES method never can achieve the target SINR value for all users. Also this figure shows that the SSPC algorithm offers more savings in the TTP as compared the FSPC and VSPC algorithms. Also the TTP for the joint SSPC algorithm and SB technique is lower than other cases. Although not shown in the figure, in case of without power control and because of near-far problem, the target SINR level is not achieved for all users. Figure 9 presents the average BER versus the signal to noise ratio (SNR) for CLMS algorithm and SB tech- nique and different values of 2 . In this figure, we ob- serve that the average BER for the SB technique is lower than the CLMS algorithm. For example, at a SNR of 10dB and 24dB , the average BER is 0.0011 for CLMS algorithm, while for SB technique is 0.00018. Also it can be seen that the average BER for 20dB (perfect power control) is lower th an the other cases. For example, at a SNR of 10dB and for CLMS algo- rithm, the average BER is 0.0007 for PPC, while for 28dB the average BER is 0.0016. Figure 10 presents the average BER versus the num- ber of active users for SNR 10dB and different val- ues of 2 as Figure 9. Similar to Figure 9, we observe that the average BER for 20dB is lower than 22,4,8dB . For example, at a BER of 0.001, the re- Figure 8. Total transmit power of all users versus power control iteration index (n). No power constraints. Figure 9. Average BER versus the SNR for the SB tech- nique and CLMS algorithm (M = 15). Figure 10. Average BER versus the number of active users for the SB technique and CLMS algorithm (SNR = 10 dB). ceiver with CLMS algorithm support 18Musers for 20dB , while for 22,4,8dB support 16M , 15, and 12 users, respectively. Accordingly in this case, with 2 from 2 to 8 dB, the system capacity degrades from 6% to 34% compared to the case of PPC. We also ob- serve that with SB technique can achieve lower BER than the CLMS algorithm. For example, at a BER of 0.0001 and28dB , the number of users allowed in the system is 15M users for SB technique, while for CLMS algorithm is 5M users. Other results displayed in Figure 11 and Figure 12 show the influence of path-loss parameter in USPS L and number of antenna elements N on the average BER for the CLMS algorithm, SNR 10dB, and 2 4dB . In Figure 11, we can observe that, as expected, a decrease in the path-loss parameter entails an increase in the interference and desired signal levels and, there- fore using antenna arrays in BS, an improvement in sys- tem performance. For example, at a BER of 0.005, ca- pacity is, respectively, 16, 29, and 34 users for L = 0.5, 0.05, and 0.01d B/m. In Figure 12, it is seen that for L = 0.05dB/m and a required average BER of 0.0025, if N increases from 5 to 15, the number of active users in- creases by approximately 60%.  M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 877 Figure 11. Influence of path-loss parameter (L) on average BER (SNR = 10 dB, N = 10). Figure 12. Influence of number of antenna elements (N) on average BER (SNR = 10 dB, L = 0.05 dB/m). 9. Conclusions In this paper, we studied performance of single-cell wireless communication systems in a 2D urban environ- ment with closed-loop power control. Also, we deter- mined the optimum weights of the elements of array an- tenna with the CLMS algorithm. Accordingly, we proposed the SSPC algorithm in or- der to compensate the effects of the near-far problem. It has been shown that, by using antenna arrays at BS, this algorithm will decrease the interference in cell. In addi- tion, the TTP expected by all users is less as compared to the VSPC and FSPC algorithms. Thus, it decreases the BER by allowing the SINR targets for the users to be higher, or by increasing the number of users supportable at a fixed SINR target level. It has also been observed that the TTP in SB technique is less than CLMS algo- rithm. Also, it has been shown that the convergence speed of the proposed algorithm is increased in com- parison with the VSPC and FSPC algorithms. Also, our simulations show that the variations in power level due to PCE have a detrimental effect on system performance. 10. Acknowledgements This research is supported under research project by the Islamic Azad University, Qazvin Branch, Qazvin, Iran. 11. References [1] J. T. Wang, “Admission Control with Distributed Joint Diversity and Power Control for Wireless Networks,” IEEE Transactions on Vehicular Technology, Vol. 58, No. 1, 2009, pp. 409-419. [2] A. Abrardo and D. Sennati, “On the Analytical Evalua- tion of Closed-Loop Power-Control Error Statistics in DS-CDMA Cellular Systems,” IEEE Transactions on Vehicular Technology, Vol. 49, No. 6, 2000, pp. 2071 -2080. [3] L. Carrasco and G. Femenias, “Reverse Link Perform- ance of a DS-CDMA System with both Fast and Slow Power Controlled Users,” IEEE Transactions on Wireless Communications, Vol. 7, No. 4, 2008, pp. 1255-1263. [4] L. Qian and Z. Gajic, “Variance Minimization Stochastic Power Control in CDMA System,” IEEE Transactions on Wireless Communications, Vol. 5, No. 1, 2006, pp. 193- 202. [5] M. Rintamaki, H. Koivo and I. Hartimo, “Adaptive Closed-Loop Power Control Algorithms for CDMA Cel- lular Communication Systems,” IEEE Transactions on Vehicular Technology, Vol. 53, No. 6, 2004, pp. 1756 -1768. [6] J. Wang and A. Yu, “Open-Loop Power Control Error in Cellular CDMA Overlay Systems,” IEEE Journal on Se- lected Areas in Communi cat io ns, Vol. 19, No. 7, 2001, pp. 1246-1254. [7] M. Dosaranian-Moghadam, H. Bakhshi, G. Dadashzadeh and P. Rahmati, “Adaptive Beamforming Method Based on Constrained LMS Algorithm for Tracking Mobile Us- er,” IEEE Global Mobile Congress, Shanghai, China, October 2009, pp. 1-6. [8] M. Dosaranian-Moghadam, H. Bakhshi and G. Dadash- zadeh, “Adaptive Beamforming Method Based on Closed -Loop Power Control for DS-CDMA Receiver in Multi- path Fading Channel,” Accepted for publication in the IEEE International Conference on Communication Sys- tems, Singapore, 17-20 November 2010. [9] M. Dosaranian-Moghadam, H. Bakhshi and G. Dadash- zadeh, “Interference Management for DS-CDMA Systems through Closed-Loop Power Control, Base Station As- signment, and Beamforming,” Journal of Wireless Sensor Network, Vol. 2, No. 6, 2010, pp. 472-482. [10] M. Dosaranian-Moghadam, H. Bakhshi, G. Dadashzadeh and M. Godarzvand-Chegini, “Joint Base Station Assign- ment, Power Control Error, and Adaptive Beamforming for DS-CDMA Cellular Systems in Multipath Fading Channels,” Accepted for publication in IEEE Global Mo- bile Congress, Shanghai, China, 18-19 October 2010. [11] M. Dosaranian-Moghadam, H. Bakhshi and G. Dadash- zadeh, “Joint Centralized Power Control and Cell Sector- ing for Interference Management in CDMA Cellular Systems in a 2D Urban Environment,” Journal of Wire- less Sensor Network, Vol. 2, No. 8, 2010, pp. 599-605.  M. D. MOGHADAM ET AL. Copyright © 2010 SciRes. WSN 878 [12] F. Rashid-Farrokhi, L. Tassiulas and K. J. Ray -Liu, “Joint Optimal Power Control and Beamforming in Wireless Networks using Antenna Arrays,” IEEE Transactions on Communications, Vol. 46, No. 10, 1998, pp. 1313-1324. [13] M. Z. Shakir and T. S. Durrani, “Narrowband Beam- forming Algorithm for Smart Antennas,” International Bhurban Conference on Applied Sciences & Technology, Islamabad, January 2007, pp. 49-54. [14] X. Y. Sun, X. H. Lian and J. J. Zhou, “Robust Adaptive Beamforming Based on Maximum Likelihood Estima- tion,” International Conference on Microwave and Mil- limeter Wave Technology, Nanjing, China, Vol. 3, 2008, pp. 1137-1140. [15] J. Litva and T. Kwok-Yeung, “Digital Beamforming in Wi reles s Co mmunica tio n s,” Arte ch Hou se, Lond on, 1996. [16] S. Haykin, “Adaptive Filter Theory,” 3th Edition, Pren- tice Hall, New Jersey, 1996. [17] R. L. Peterson, R. E. Ziemer and D. E. Borth, “Spread-Spectrum Communications,” Prentice-Hall, New Jersey, 1995. [18] A. Yener, R. D. Yates and S. Ulukus, “Interference Management for CDMA Systems through Power Control, Multiuser Detection, and Beamforming,” IEEE Transac- tions on Communications, Vol. 49, No. 9, 2001, pp. 1227 -1239. [19] S. Kandukuri and S. Boyd, “Optimal Power Control in Interference-Li mited Fading Wirele ss Cha nnels with O utage Probability Specifications,” IEEE Transactions on Wire- less Communications, Vol. 1, No. 1, 2002, pp. 46-55. [20] S. Grandhi, R. Vijayan and D. Goodman, “Centralized Power Control in Cellular Radio Systems,” IEEE Trans- actions on Vehicular Technology, Vol. 42, No. 4, 1993, pp. 466-468. [21] J. Zander, “Distributed Cochannel Interference Control in Cellular Radio Systems,” IEEE Transactions on Vehicu- lar Technology, Vol. 44, No. 3, 1992, pp. 305-311. [22] S. Grandhi, R. Vijayan and D.Goodman, “Distributed Power Control in Cellular Radio Systems,” IEEE Trans- actions on Communications, Vol. 42, No. 2/3/4, 1994, pp. 226-228. [23] A. Kurniawan, “Effect of Feedback Delay on Fixed Step and Variable Step Power Control Algorithm in CDMA Systems,” IEEE International Conference on Communi- cation Systems, Singapore, Vol. 2, 2002, pp. 1096-1100. [24] J. M. Romero-Jerez, C. Tellez-Labao and A. Diaz-Estrella, “Effect of Power Control Imperfections on the Reverse Link of Cellular CDMA Networks under Multipath Fad- ing,” IEEE Transactions on Vehicular Technology, Vol. 53, No.1, 2004, pp. 61-71. [25] B. Allen and M. Beach, “On the Analysis of Switch- ed-Beam Antennas for the W-CDMA Downlink,” IEEE Transactions on Vehicular Technology, Vol. 53, No. 3, 2004, pp. 569-578. [26] G. E. Corazza, G. De Maio and F. Vatalaro, “CDMA Cellular Systems Performance with Fading, Shadowing, and Imperfect Power Control,” IEEE Transactions on Vehicular Technology, Vol. 47, No. 2, 1998, pp. 450-459. |