Paper Menu >>
Journal Menu >>
 J. Software Engi neeri n g & Applications, 2010, 3, 906-913 doi:10.4236/jsea.2010.310107 Published Online October 2010 (http://www.SciRP.org/journal/jsea) Copyright © 2010 SciRes. JSEA Accuracy of Measuring Camera Position by Marker Observation Vladimir A. Grishin Space Research Institute (IKI), Russian Academy of Sciences, Moscow, Russia. Email: vgrishin@iki.rssi.ru Received July 14th, 2010; revised August 10th, 2010; accepted August 14th, 2010. ABSTRACT A lower bound to errors of measuring object position is constructed as a function of parameters of a monocular com- puter vision system (CVS) as well as of observation cond itions and a shape of an observed marker. Th is bound justifies the specification of the CVS parameters and allows us to formulate constraints for an object trajectory based on re- quired measu r ement accuracy. For making the measure ment, the boundaries of marker image are used. Keywords: Computer Vision System, Camera Position Measurement, Marker Observation, Lower Bound to Errors 1. Introduction CVSs are widely applied for a solution of motion control problems. This fact is associated by the following condi- tions. First, the computational capability of available processors allows for the real-time processing of large volumes of information formed by TV cameras. The in- formation processing time proves to be acceptable to a number of practical problems [1-6]. Second, the increas- ing application of computer-aided control systems of unmanned aerial vehicles requires the enhancement of the vector of measured parameters to solve the automatic landing problem [5]. Another task is a docking problem (including the spacecraft docking), which requires pre- cise measuring a relative position for solving the terminal control task [6]. As an example we can refer to the dock- ing the first European Automated Transfer Vehicle (ATV) “Jules Verne” to the International Space Station (ISS) on 3 April 2008. In the above experiment, a special com- puter vision system was used for measuring the relative spatial and angular position. All of these facts stimulate interest in estimation of the potential accuracy (lower bounds to errors) of measuring the position parameters as a function of the marker shape, its observation condition and technical parameters of the CVS. This allows us to evaluate an applicability of CVSs to solving control problems under specific conditions as well as to optimize the CVS parameters from the view- point of ensuring the required accuracy of measurements. There are a small number of publications devoted to the problems of determining the current coordinates meas- urement precision estimation. Most publications are based on experimental approach (full-scale experiments or stochastic simulation) to the measurement precision estimation. For obtaining reliable estimation, such ap- proach requires too much time and additionally the full-scale experiments are very expensive. In [7], the Cramér–Rao bound is constructed to camera position estimation by docking marker observation. For position estimation, a set of the marker features (points of interest) are used, namely corners, contrast spots and others. This approach is suitable for the case of small or medium marker observation distance. In such distances the visible size of marker is of order tens or hundreds of pixels in any direction. In the present paper, we consider the approach, which is suitable for large distances by using the boundaries between marker image and back- ground. This approach allows obtaining lower bound to errors of measuring object position with small computa- tional expenses. It allows in one’s turn to optimize CVS parameters and marker shape for a specified set of the observation conditions. In Section 2, we formulate the assumptions for con- structing the bound to errors. In Section 3, we construct a Cramér–Rao bound to the measurement errors and, in Section 4, we present experimental results. 2. Assumptions Made When Constructing a Bound We make the following simplifying assumptions to esti- 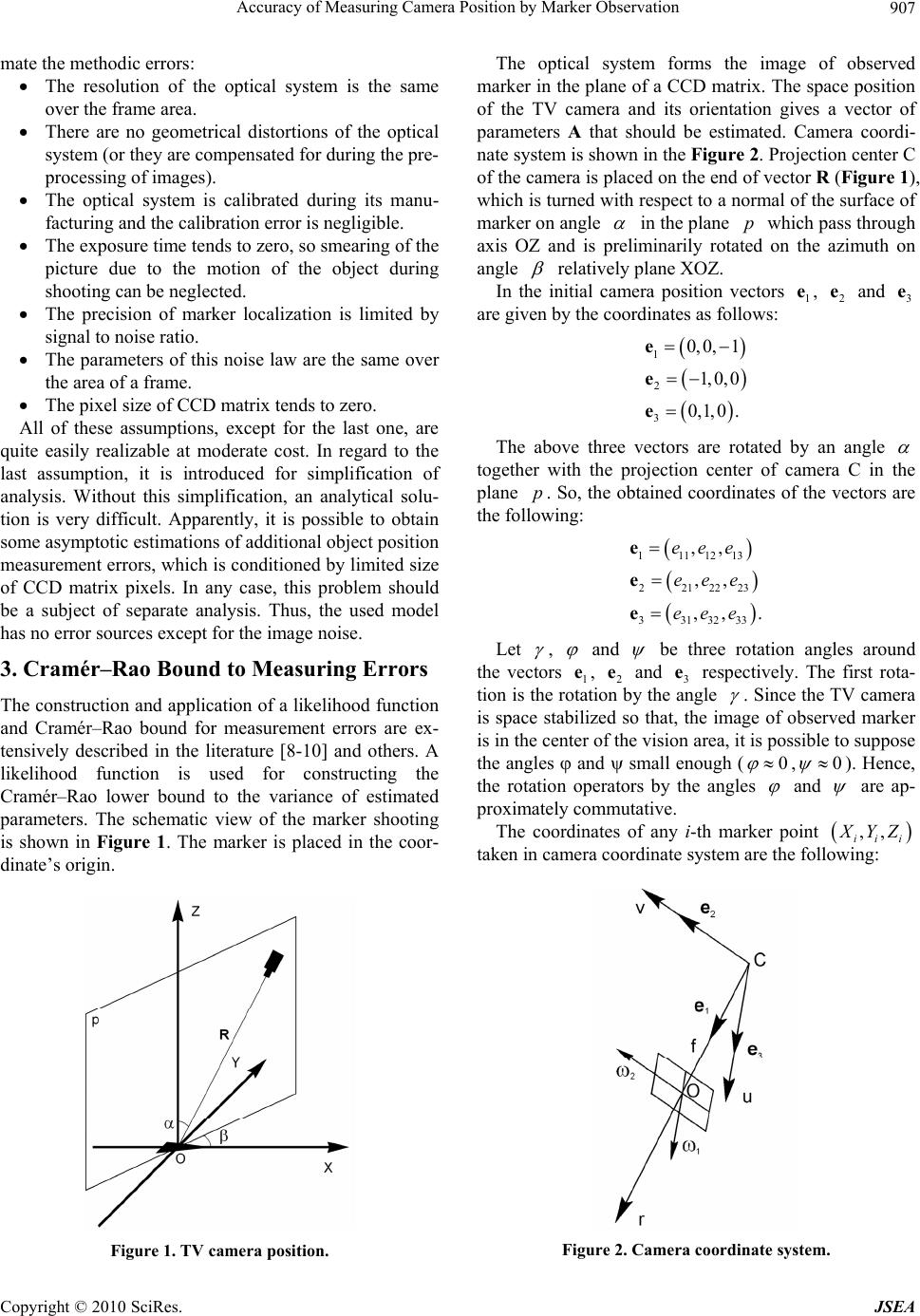 Accuracy of Measuring Camera Position by Marker Observation907 mate the methodic errors: The resolution of the optical system is the same over the frame area. There are no geometrical distortions of the optical system (or they are compensated for during the pre- processing of images). The optical system is calibrated during its manu- facturing and the calibration error is negligible. The exposure time tends to zero, so smearing of the picture due to the motion of the object during shooting can be neglected. The precision of marker localization is limited by signal to noise ratio. The parameters of this noise law are the same over the area of a frame. The pixel size of CCD matrix tends to zero. All of these assumptions, except for the last one, are quite easily realizable at moderate cost. In regard to the last assumption, it is introduced for simplification of analysis. Without this simplification, an analytical solu- tion is very difficult. Apparently, it is possible to obtain some asymptotic estimations of additional object position measurement errors, which is conditioned by limited size of CCD matrix pixels. In any case, this problem should be a subject of separate analysis. Thus, the used model has no error sources except for the image noise. 3. Cramér–Rao Bound to Measuring Errors The construction and application of a likelihood function and Cramér–Rao bound for measurement errors are ex- tensively described in the literature [8-10] and others. A likelihood function is used for constructing the Cramér–Rao lower bound to the variance of estimated parameters. The schematic view of the marker shooting is shown in Figure 1. The marker is placed in the coor- dinate’s origin. Figure 1. TV camera position. The optical system forms the image of observed marker in the plane of a CCD matrix. The space position of the TV camera and its orientation gives a vector of parameters A that should be estimated. Camera coordi- nate system is shown in the Figure 2. Projection center C of the camera is placed on the end of vector R (Figure 1), which is turned with respect to a normal of the surface of marker on angle in the plane which pass through axis OZ and is preliminarily rotated on the azimuth on angle p relatively plane XOZ. In the initial camera position vectors , and are given by the coordinates as follows: 1 e2 e3 e 1 2 3 0, 0,1 1, 0,0 0,1,0. e e e The above three vectors are rotated by an angle together with the projection center of camera C in the plane . So, the obtained coordinates of the vectors are the following: p 1111213 2212223 3313233 ,, ,, ,, eee eee eee e e e. Let , and be three rotation angles around the vectors 1, 2 and 3 e respectively. The first rota- tion is the rotation by the angle e e . Since the TV camera is space stabilized so that, the image of observed marker is in the center of the vision area, it is possible to suppose the angles and small enough (0 ,0 ). Hence, the rotation operators by the angles and are ap- proximately commutative. The coordinates of any i-th marker point ,, ii i X YZ taken in camera coordinate system are the following: Figure 2. Camera coordinate system. Copyright © 2010 SciRes. JSEA  Accuracy of Measuring Camera Position by Marker Observation 908 , ii ii ii X XX YYY Z ZZ where ,, X YZ is the coordinates of camera projection center C. The coordinates of the i-th point of the marker in CCD matrix are calculated by: 11 1213ii i f a X eYeZe 13132 iii i aXeYeZe 33 23 22122 iii i aXeYeZe , where f -is a focal distance of the camera. For the specified camera’s spatial and angular posi- tions, the i-th point ,, ii i X YZ taken in the coordi- nates of CCD matrix depends on the parameters: 11,,,,, ii XYZ 22 ,,,,, . ii XYZ Since we consider an observation of marker from me- dium and long distances, the measurement angular errors of and as well as the translation errors in the direction of the vectors 3 and 2 are heavily corre- lated. So, we estimate the precision only for four pa- rameters, that are given by a vector e e ,,,rvu A 2 e . Axis r is parallel to , v is parallel to and u is parallel to . 1 e 3 e The construction and application of the likelihood function are well known from [8-10] and others. This likelihood function is used for constructing the Cramér–Rao lower bound to the variance of estimated parameters. The likelihood function depends on parame- ters being under estimation. The estimations of the pa- rameters are defined by the values that provide the ex- tremum of the likelihood function: P extrA , where is the likelihood function. PA The necessary condition of extremum is given by: 0,1,..., 4. i Pi A A Accordingly, we can use a logarithm of the likelihood function for finding of extremum of . Analogous condition of extremum can be: PA ln 0,1,..., 4. i Pi A A Covariance matrix of estimated parameters is: 1 RJ , where J is the Fisher information matrix, which is calculated from the likelihood function. According to the Cramér–Rao inequalities, the lower bounds to the vari- ances of unbiased estimation errors are given by: 22 112 2 ,, rv RR AA 22 33 44 ,. uRR AΑ We estimate the covariance for the estimation of vec- tor A. For this goal, we first determine the Fisher infor- mation matrix, which is expressed via the second deriva- tives of the likelihood function as follows: 2lnln ln , ij iji j PPP JE E AAA A AA A where is a mathematical expectation. [...]E Let’s consider an observed image of marker: ,s ωωAω , where ,sωA is the marker image and ω is noise with intensity 0 2 2 N . Without loss of com- monness, we can suppose that a brightness value of marker image ,ωA s is equal to one, and a brightness of remaining part of the cadre is zero. In reference [11], an expression of Fisher Information Matrix was derived for the case of one-dimensional sig- nal. For the two-dimensional case, this expression can be easily obtained by the same way: 0 ,, 2 ij ij ss J Ed NAA ωAωA ω , where is a marker image area and is an ele- mentary square in dω . In general case, the calculation of the Fisher informa- tion matrix requires to determine the above mathematical expectation . In our case, the expression in square brackets is deterministic, and therefore we obtain the following elements of the Fisher information matrix: [...]E 0 ,, 2 ij ij ss J d NA A ωAωA ω (1) Let’s consider derivatives. The is the vector of pa- rameters that gives the camera position. The finite dif- ference approximation of the derivative is defined as follows: A Copyright © 2010 SciRes. JSEA 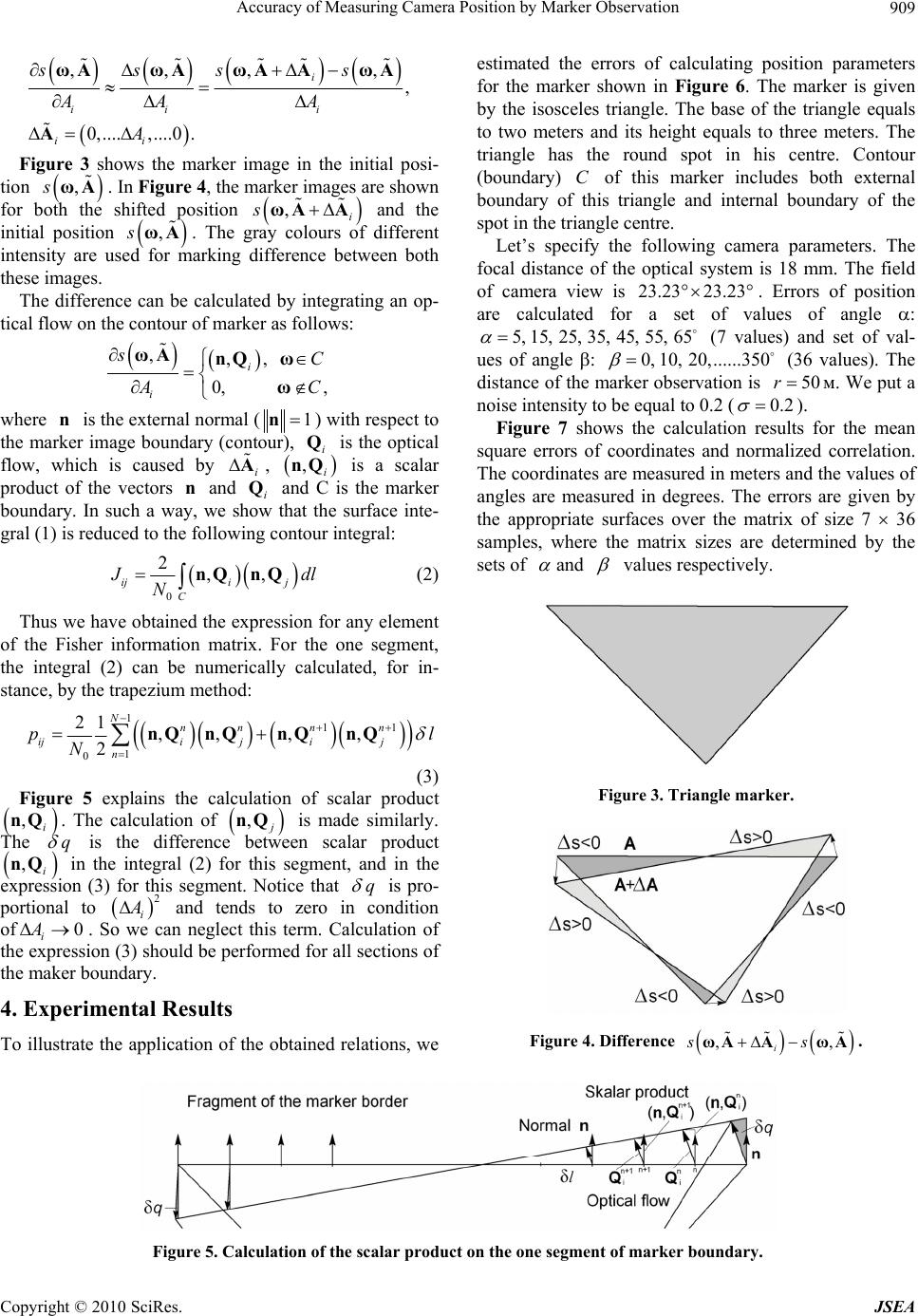 Accuracy of Measuring Camera Position by Marker Observation Copyright © 2010 SciRes. JSEA 909 ,,, , 0,....,....0 . i ii i ii sss s AA A A ωAωAωAAωA A , estimated the errors of calculating position parameters for the marker shown in Figure 6. The marker is given by the isosceles triangle. The base of the triangle equals to two meters and its height equals to three meters. The triangle has the round spot in his centre. Contour (boundary) of this marker includes both external boundary of this triangle and internal boundary of the spot in the triangle centre. C Figure 3 shows the marker image in the initial posi- tion . In Figure 4, the marker images are shown for both the shifted position and the initial position . The gray colours of different intensity are used for marking difference between both these images. ,sωA ,i sωAA ,sωA Let’s specify the following camera parameters. The focal distance of the optical system is 18 mm. The field of camera view is . Errors of position are calculated for a set of values of angle : (7 values) and set of val- ues of angle : (36 values). The distance of the marker observation is м. We put a noise intensity to be equal to 0.2 ( 23.23 23.23 5, 55,65 0, 10,20,......350 5, 15,25,35,4 r 0.2 50 ). The difference can be calculated by integrating an op- tical flow on the contour of marker as follows: ,,, 0, , i i sC AC ωAnQ ω ω where is the external normal ( n1n) with respect to the marker image boundary (contour), is the optical flow, which is caused by i Q i A , is a scalar product of the vectors and i Q and C is the marker boundary. In such a way, we show that the surface inte- gral (1) is reduced to the following contour integral: ,i nQ Figure 7 shows the calculation results for the mean square errors of coordinates and normalized correlation. The coordinates are measured in meters and the values of angles are measured in degrees. The errors are given by the appropriate surfaces over the matrix of size 7 36 samples, where the matrix sizes are determined by the sets of and values respectively. n 0 2,, iji j C J dl N nQ nQ (2) Thus we have obtained the expression for any element of the Fisher information matrix. For the one segment, the integral (2) can be numerically calculated, for in- stance, by the trapezium method: 111 1 0 21 ,,, , 2 Nnnn n iji jij n pl N nQ nQnQnQ (3) Figure 3. Triangle marker. Figure 5 explains the calculation of scalar product . The calculation of ,i nQ , j nQ is made similarly. The q is the difference between scalar product in the integral (2) for this segment, and in the expression (3) for this segment. Notice that ,i nQ q is pro- portional to 2 i A and tends to zero in condition of . So we can neglect this term. Calculation of the expression (3) should be performed for all sections of the maker boundary. 0 i A 4. Experimental Results Figure 4. Difference . ,, i ss ωAAωA To illustrate the application of the obtained relations, we Figure 5. Calculation of the scalar product on the one segment of marker boundary.  Accuracy of Measuring Camera Position by Marker Observation 910 Figure 6. Marker shape. Accordingly to Figure 7, for the distance of 50 m and the noise intensity 0.2 , the range r can be meas- ured with error 0.02 r0.04 .05 0.4 m, as well as the dis- placement in a CCD matrix plane can be measured with errors VU , 0 m. Rotation around the vec- tor can be measured with the error . As followed from Figure 7, the functional dependences of measurement errors and normalized correlation of linear and angular coordinates are very complicated functions. We have considered the maker of uniform brightness. In this case, only the contrast boundary oper- ates in the marker image. The calculated precision values are much higher than the similar values in [7] that are based on using a small set of features (points of interest) of the marker. Using the boundaries of marker image for measurement provides an increase of the measurement precision. Mention should be made that optical system distortions and low resolution of CCD camera can seri- ously deteriorate the precision of measurement. Joint analysis of noise and camera resolution influence on the precision of measurement is complicated enough. r0.015 0.04 The above values of the mean square error and the normalized correlation should be taken in an account in creating the computer vision system. The significant values of the normalized correlation show the consider- able dependences between control loops of object posi- tion coordinates. This fact should be taken into account in the control system. The development of a computer vision system should be carried out together with the development of the marker shape. α° β° σ r [m] α° β° σ v [m] α° β° σ u [m] α° β° σ γ ° Copyright © 2010 SciRes. JSEA 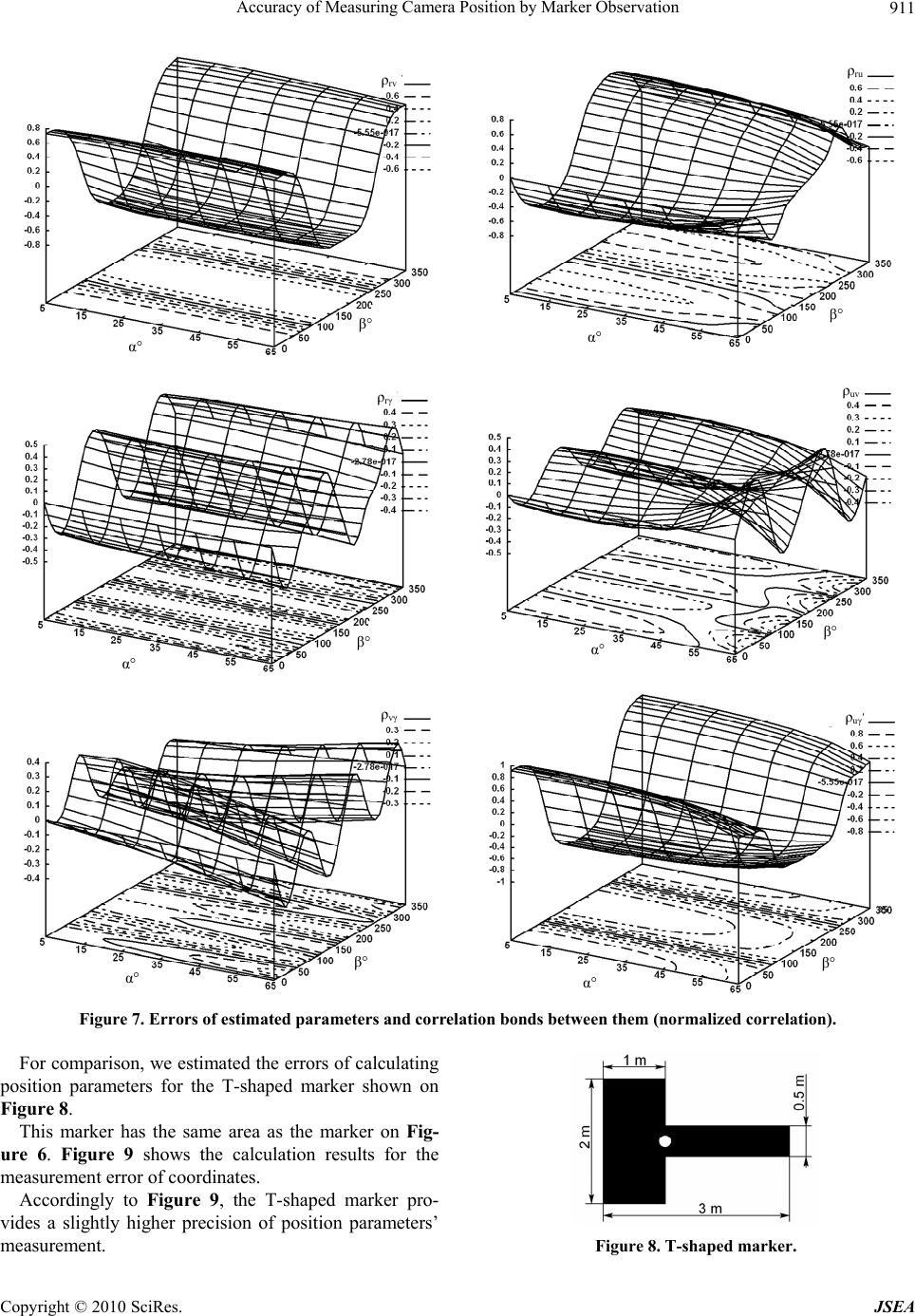 Accuracy of Measuring Camera Position by Marker Observation911 α° β° ρ rv α° β° ρru α° β° ρ rγ α° β° ρ uv α° β° ρ vγ α° β° ρ uγ Figure 7. Errors of estimated parameters and correlation bonds between them (normalized correlation). For comparison, we estimated the errors of calculating position parameters for the T-shaped marker shown on Figure 8. This marker has the same area as the marker on Fig- ure 6. Figure 9 shows the calculation results for the measurement error of coordinates. Accordingly to Figure 9, the T-shaped marker pro- vides a slightly higher precision of position parameters’ measurement. Figure 8. T-shed marker. ap Copyright © 2010 SciRes. JSEA  Accuracy of Measuring Camera Position by Marker Observation 912 [m] α° β° σ r α° β° [m] σ v α° β° [m] σ u ° σ γ α° β° Figure 9. Errors of estimated parameters for T-shaped marker. 5. Conclusions The new method has been proposed for estimating the errors of determining the TV camera position. This method is based on using the marker image of a given shape. The method allows us to estimate the measure- ment errors depending on shooting conditions and CVS parameters. The obtained error's estimations are useful for development of CVSs and particularly for optimiza- tion of their parameters. 6. Acknowledgement This work was supported by the Russian Foundation for Basic Research, project no. 09-01-00573-а. REFERENCES [1] C. De Wagter and J. A. Mulder, “Towards Vision-Based UAV Situation Awareness,” Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Francisco, California, August 2005, pp. AIAA-2005- 5872. [2] S. Saripalli, J. F. Montgomery and G. S. Sukhatme, “Visually-Guided Landing of an Unmanned Aerial Vehi- cle,” IEEE Transactions on Robotics and Automation, Vol. 19, No. 3, June 2003, pp. 371-380. [3] S. Saripalli and G. S. Sukhatme, “Landing a Helicopter on a Moving Target,” Proceedings of IEEE International Conference on Robotics and Automation (ICRA’2007), Roma, Italy, April 2007, pp. 2030-2035. [4] T. Kubota, S. Sawai, T. Misu, T. Hashimoto, J. Kawagu- chi and A. Fujiwara, “Autonomous Landing System for MUSES-C Sample Return Mission,” Proceedings of the Fifth International Symposium on Artificial Intelligence, Robotics and Automation in Space (ISAIRAS’99), ESA SP-440, Noordwijk, The Netherlands, June 1999, pp. 615-620. [5] C. S. Sharp, O. Shakernia and S. S. Sastry, “A Vision System for Landing an Unmanned Aerial Vehicle,” Pro- ceedings of IEEE International Conference on Robotics and Automation (ICRA 2001), Seoul, Korea, May 2001, Copyright © 2010 SciRes. JSEA  Accuracy of Measuring Camera Position by Marker Observation913 pp. 1720-1727. [6] C. Akinli, “Semi-Autonomous Terminal Phase Spacecraft Docking Attitude Determination and Control,” 2004. http://cengiz.akinli.org/research/vsgc-2004.pdf [7] V. A. Grishin, “Precision Estimation of Camera Position Measurement Based on Docking Marker Observation,” Pattern Recognition and Image Analysis, Vol. 20, No. 3, 2010, pp. 341-348. [8] H. Cramer, “Mathematical Methods of Statistics,” Princeton University Press, USA, 1946. [9] I. A. Ibragimov and R. Z. Khasiminskii, “Asymptotic Estimation Theory,” Nauka, Moscow, 1979. [10] A. B. Kryanev and G. V. Lukin “Mathematical Methods for Processing Indeterminate Data,” Fizmatlit, Moscow, 2003. [11] H. L. Van Trees, “Detection, Estimation, and Modulation Theory, Part 1: Detection, Estimation, and Linear Modu- lation Theory,” John Wiley & Sons Inc., New York, 2001. Copyright © 2010 SciRes. JSEA |