Intelligent Control and Automation
Vol.4 No.4(2013), Article ID:39498,6 pages DOI:10.4236/ica.2013.44042
General Concave Integral Control
Academy of Naval Submarine, QingDao, China
Email: baishunliu@163.com, E-mail: qdqtlxq@sina.com, E-mail: jianhui_li@163.com
Copyright © 2013 Baishun Liu et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received September 6, 2013; revised October 6, 2013; accepted October 13, 2013
Keywords: General Integral Control; Nonlinear Control; Nonlinear integrator; Concave Function Gain Integrator; Bounded Integral Control Action; Output Regulation
ABSTRACT
In this paper, a class of fire-new general integral control, named general concave integral control, is proposed. It is derived by normalizing the bounded integral control action and concave function gain integrator, introducing the partial derivative of Lyapunov function into the integrator and originating a class of new strategy to transform ordinary control into general integral control. By using Lyapunov method along with LaSalle’s invariance principle, the theorem to ensure regionally as well as semi-globally asymptotic stability is established only by some bounded information. Moreover, the highlight point of this integral control strategy is that the integrator output could tend to infinity but the integral control action is finite. Therefore, a simple and ingenious method to design general integral control is founded. Simulation results showed that under the normal and perturbed cases, the optimum response in the whole domain of interest can all be achieved by a set of the same control gains, even under the case that the payload is changed abruptly.
1. Introduction
Integral control [1] plays an important role in control system design because it ensures asymptotic tracking and disturbance rejection. In the presence of the parametric uncertainties and unknown constant disturbances, integral control can still preserve the stability of the closedloop system and create an equilibrium point at which the tracking error is zero. The main task of the integral controller is to stabilize this point, which is challenging because it depends on uncertain parameters and unknown disturbances.
1.1. Classical Integral Control
The simplest controllers that achieve integral action are of the proportional integral derivative (PID) form that introduces integral action by integrating the error. It is well known that integral-action controllers with this class of integrator often suffer a serious loss of performance due to integrator windup, which occurs when the actuators in the control loop saturate. Actuator saturation not only deteriorates the control performance, causing large overshoot and large settling time, but can also lead to instability, since the feedback loop is broken for such saturation. To disguise this drawback, various antiwindup schemes have been proposed to deal with integrator windup or to improve transient performance. These are classified into three different approaches: 1) conditional integration and/or integrator limiting [2-7], in which the integrator value is frozen or restricted when certain conditions are verified; 2) back-calculation [8-11], in which the difference between the controller output and the actual plant input is fed back to the integrator; and 3) a nonlinear integrator [12-16], whose output is shaped by a nonlinear error function before it enters the controller. Some conditional integration and/or integrator limiting may not guarantee a zero steady error and could result in an oscillatory system for the step-referent input when an estimated limitation is embedded in the controller. In the back-calculation approach, the compensation for integrators is active whenever actuators are saturated; integrator windup cannot be completely avoided. For nonlinear integrators, the output still goes to infinity and integrator windup may occur. In addition, the universal integral continuous sliding mode control (CISMC) first reported by [1] has the same problem as a PID controller because it applies the same integrator. An improved version was proposed by [7], in which the integrator is modified to provide integral action only inside the boundary layer and the derivative of the error introduced into the integrator. All these integrators, except for the one proposed by [7], were designed by using the error as the indispensable element. So, all of them is called classical integral control.
1.2. General Integral Control
In 2009, general integral control, which uses all available state variables to design the integrator, is originated in [17], where presents a unified framework for general integral control, some general integrator and controller, the necessary conditions and basic principles for designing a general integrator, however, their justification was not verified by strictly mathematical analysis. In 2012, based on linear system theory, we present a systematic design method for general integral control [18] with a linear integrator on all the state of dynamics. The results, however, were local. The regionally as well as semiglobally results were proposed in [19], where presents a nonlinear integrator shaped by sliding mode manifold, and then general integral control design is achieved by sliding mode technique and linear system theory. Therein, the sprout of concave function gain integrator appeared. In 2013, based on feedback linearization technique, a class of nonlinear integrator which is shaped by diffeomorphism, and a systematic design method for general integral control are presented by [20] and the conditions to ensure regionally as well as semiglobally asymptotic stability are provided.
This paper is not a simple extension of the work [19], but it is developed as a class of fire-new general integral control, named general concave integral control in such a way of normalization. The main contributions are as follows: 1) the partial derivative of a class of general Lyapunov function is firstly introduced into the integrator design; 2) the bounded integral control action and concave function gain integrator are normalized; 3) a general strategy to transform ordinary control into general integral control is proposed; iv) by using Lyapunov method and LaSalle’s invariance principle, the theorem to ensure regionally as well as semi-globally asymptotic stability is established only by some bounded information. Moreover, the highlight point of this integral control strategy is that the integrator output could tend to infinity but the integral control action is finite. Therefore, a simple and ingenious method to design general integral control is founded.
Throughout this paper, we use the notation  and
and  to indicate the smallest and largest eigenvalues, respectively, of a symmetric positive define bounded matrix
to indicate the smallest and largest eigenvalues, respectively, of a symmetric positive define bounded matrix , for any
, for any . The norm of vector
. The norm of vector  is defined as
is defined as , and that of matrix
, and that of matrix  is defined as the corresponding induced norm
is defined as the corresponding induced norm .
.
The remainder of the paper is organized as follows: Section 2 describes the system under consideration, assumption, and definition. Section 3 addresses the control design. Simulation is provided in Section 4. Conclusions are presented in Section 5.
2. Problem Formulation
Consider the following nonlinear system,
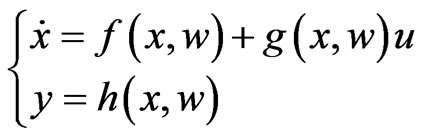 (1)
(1)
where  is the state,
is the state,  is the control input,
is the control input,  is the controlled output,
is the controlled output,  is a vector of unknown constant parameter and disturbance. The functions
is a vector of unknown constant parameter and disturbance. The functions ,
,  and
and  are continuous in
are continuous in  on the domain
on the domain  . In this study, the function
. In this study, the function  does not necessarily vanish at the origin; i.e.,
does not necessarily vanish at the origin; i.e., . Let
. Let  be a vector of constant reference. Set
be a vector of constant reference. Set  and
and . We want to design a feedback control law
. We want to design a feedback control law  such that
such that  as
as .
.
Assumption 1: For each , there is a unique pair
, there is a unique pair  that depends continuously on
that depends continuously on  and satisfies the equations,
and satisfies the equations,
 (2)
(2)
so that  is the desired equilibrium point and
is the desired equilibrium point and  is the steady-state control that is needed to maintain equilibrium at
is the steady-state control that is needed to maintain equilibrium at , where
, where .
.
For convenience, we state all definitions, assumptions and theorems for the case when the equilibrium point is at the origin of , that is,
, that is, . There is no loss of generality in doing so because any equilibrium point can be shifted to the origin via a change of variables.
. There is no loss of generality in doing so because any equilibrium point can be shifted to the origin via a change of variables.
Assumption 2: No loss of generality, suppose that the function  satisfies,
satisfies,
 (3)
(3)
 . (4)
. (4)
where  is a positive constant.
is a positive constant.
Assumption 3: Suppose that there exists a control law  such that
such that  is an exponentially stable equilibrium point of the system,
is an exponentially stable equilibrium point of the system,
 (5)
(5)
and there exists a Lyapunov function  that satisfies,
that satisfies,
 (6)
(6)
 (7)
(7)
 (8)
(8)
for all ,
,  and
and . Where
. Where ,
,  ,
,  and
and  are all positive constants.
are all positive constants.
For the purpose of this note, we introduce the following definition and property, which is proposed by [13].
Definition 1:  with
with ,
,  and
and  denotes the set of all continuous differential increasing bounded functions,
denotes the set of all continuous differential increasing bounded functions,
 such that
such that
where  stands for the absolute value.
stands for the absolute value.
Figure 1 depicts the region allowed for all the functions belonging to function set . For instance, the hyperbolic tangent, arc tangent functions and so on.
. For instance, the hyperbolic tangent, arc tangent functions and so on.
An important property of function  belonging to function set
belonging to function set  is that the Euclidean norm of
is that the Euclidean norm of  satisfies for all
satisfies for all ,
,
 (9)
(9)
3. Control Design
For achieving asymptotic regulation and disturbance rejection, we need to include “integral action” in the control law . Thus, general integral controller are proposed as follows,
. Thus, general integral controller are proposed as follows,
 (10)
(10)
where ,
, ;
;

Figure 1.  functions.
functions.
 belongs to function set
belongs to function set .
.  is a positive define diagonal
is a positive define diagonal  matrix.
matrix.
Thus, substituting (10) into (1) to obtain the augmented system,
 (11)
(11)
By Assumption 1 and choosing  to be nonsingular and large enough, and then set
to be nonsingular and large enough, and then set  and
and  of the Equation (11), we obtain,
of the Equation (11), we obtain,
 (12)
(12)
Therefore, we ensure that there is a unique solution , and then
, and then  is a unique equilibrium point of the closed-loop system (11) in the control domain of interest. At the equilibrium point,
is a unique equilibrium point of the closed-loop system (11) in the control domain of interest. At the equilibrium point,  , irrespective of the value of
, irrespective of the value of .
.
Now, the design task is to provide the conditions on the positive constants ,
,  and matrix
and matrix  such that
such that  is an asymptotically stable equilibrium point of the closed-loop system (11) in the control domain of interest, which is not a trivial task because the closed-loop system depends on the unknown vector
is an asymptotically stable equilibrium point of the closed-loop system (11) in the control domain of interest, which is not a trivial task because the closed-loop system depends on the unknown vector . This is established in the following theorem.
. This is established in the following theorem.
Theorem 1: Under Assumptions 1-3, if there exists a positive define diagonal matrix  such that the the following inequalities,
such that the the following inequalities,
 (13)
(13)
 (14)
(14)
hold, and then  is an exponentially stable equilibrium point of the closed-loop system (11). Moreover, if all assumptions hold globally, and then it is globally exponentially stable.
is an exponentially stable equilibrium point of the closed-loop system (11). Moreover, if all assumptions hold globally, and then it is globally exponentially stable.
Proof: To carry out the stability analysis, we consider the following Lyapunov function candidate,
 (15)
(15)
Obviously, Lyapunov function candidate (15) is positive define. Therefore, our task is to show that its time derivative along the trajectories of the closed-loop system (11) is negative define, which is given by,
 (16)
(16)
Substituting (12) into (16), we obtain,
 (17)
(17)
Using (4), (7), (8) and (9), we get,
 (18)
(18)
Using the fact that Lyapunov function candidate (15) is a positive define function and its time derivative is a negative define function if the inequalities (13) and (14) hold, we conclude that the closed-loop system (11) is stable. In fact,  means
means  and
and . By invoking LaSalle’s invariance principle [21], it is easy to know that the closed-loop system (11) is exponentially stable.
. By invoking LaSalle’s invariance principle [21], it is easy to know that the closed-loop system (11) is exponentially stable.
Corollary 1: If the function  is equal to a constant, and then the integrator can be taken as
is equal to a constant, and then the integrator can be taken as  or
or . Thus, under Assumptions 1 and 3, we only need to choose the gain matrix
. Thus, under Assumptions 1 and 3, we only need to choose the gain matrix  to be nonsingular and large enough such that the inequality (13) holds, and then
to be nonsingular and large enough such that the inequality (13) holds, and then  is an exponentially stable equilibrium point of the closed-loop system (11). Moreover, if all assumptions hold globally, and then it is globally exponentially stable. The proof can follow the similar argument and procedure. It is omitted because of the limited space.
is an exponentially stable equilibrium point of the closed-loop system (11). Moreover, if all assumptions hold globally, and then it is globally exponentially stable. The proof can follow the similar argument and procedure. It is omitted because of the limited space.
Discussion 1: compared with the integral control proposed by [19], the main differences are as follows:
1) the integral control action is not confined to the hyperbolic tangent function and can be taken as any function belonging to function set , and then the normalization of integral control action is achieved;
, and then the normalization of integral control action is achieved;
2) the indispensable element of integrator is not confined to sliding mode manifold and can be taken as the partial derivative of any Lyapunov function, which satisfies Assumption 3, and then not only the normalization of concave function gain integrator is achieved but also the partial derivative of Lyapunov function firstly is introduced into the integrator design.
3) the control element  is not confined to sliding control and can be taken as any control, which satisfies the conditions of Assumption 3.
is not confined to sliding control and can be taken as any control, which satisfies the conditions of Assumption 3.
Remark 1: The proof of Theorem 1 seems to be very simple, in fact that is not the case because there are two tedious troubles to be concealed in the stability analysis, one is that integral control action must be bounded, another is how cancel the terms on . Therefore, for solving these two troubles above, an ingenious design method is proposed as follows: just the integrator is taken as
. Therefore, for solving these two troubles above, an ingenious design method is proposed as follows: just the integrator is taken as , which is obtained by differentiating the function
, which is obtained by differentiating the function  and using the partial derivative of Lyapunov function
and using the partial derivative of Lyapunov function  as the indispensable element of integrator, and then we get
as the indispensable element of integrator, and then we get . Thus, we not only obtain a bounded integral control action
. Thus, we not only obtain a bounded integral control action  but also cancel the terms on
but also cancel the terms on  in the time derivative of Lyapunov function, and then Theorem 1 can be established only by some bounded information. Consequently, the justification of general concave integral control is verified. Moreover, this resulted in a class of new integrator with a concave function gain
in the time derivative of Lyapunov function, and then Theorem 1 can be established only by some bounded information. Consequently, the justification of general concave integral control is verified. Moreover, this resulted in a class of new integrator with a concave function gain , see Figure 2. This is why the control law (10) is called general concave integral control.
, see Figure 2. This is why the control law (10) is called general concave integral control.
Remark 2: From the control law (10), it is obvious that the highlight point of this integral control strategy is that the integrator output could tend to infinity but the integral control action is finite, which is the same as the one proposed by [19]. This means that this kind of integral control can devote its mind to counteract the unknown constant uncertainties or disturbances and filter out the other action, and then the stability analysis is easy to be achieved in theory and actuator saturation is easy to be eliminated in practice.
Remark 3: From the statement above, it is easy to see that: for achieving the integral control, we only need to find a control input  and a Lyapunov function
and a Lyapunov function  such that
such that  is an exponentially stable equilibrium point of the system (5). Especially, when the
is an exponentially stable equilibrium point of the system (5). Especially, when the

Figure 2. The concave function gain curve.
function  is equal to a constant, the dilemma condition (14) can be removed, that is, the stable conditions on the closed-loop system (11), except for the condition (13), is the same as the one of the system (5). This not only results in a class of general strategy to transform ordinary control into general integral control but also the guess [17], that is, many control laws can easily be transformed into general integral control laws, is verified partly. Moreover, there is great freedom in the choice of
is equal to a constant, the dilemma condition (14) can be removed, that is, the stable conditions on the closed-loop system (11), except for the condition (13), is the same as the one of the system (5). This not only results in a class of general strategy to transform ordinary control into general integral control but also the guess [17], that is, many control laws can easily be transformed into general integral control laws, is verified partly. Moreover, there is great freedom in the choice of  and
and  such that the control engineers can choose the most appropriate control input
such that the control engineers can choose the most appropriate control input  in hand to design their own general integral controller.
in hand to design their own general integral controller.
Based on these statements above, it is not hard to know that all of them constitute a simple and ingenious method to design general integral control together.
4. Simulation
Consider the pendulum system [21] described by,

where ,
,  ,
,  ,
,  is the angle subtended by the rod and the vertical axis, and
is the angle subtended by the rod and the vertical axis, and  is the torque applied to the pendulum. View
is the torque applied to the pendulum. View  as the control input and suppose we want to regulate
as the control input and suppose we want to regulate  to
to . Taking
. Taking ,
,  and
and , the pendulum system can be written as,
, the pendulum system can be written as,
 (19)
(19)
It is easily to know that the desired equilibrium point is  and
and  is the steadystate control that is needed to maintain equilibrium at
is the steadystate control that is needed to maintain equilibrium at . Thus, the control law in Assumption 3 can be taken as,
. Thus, the control law in Assumption 3 can be taken as,  , where k1 and k2 are all positive constants.
, where k1 and k2 are all positive constants.
Substituting  into (19) and deleting the constant term
into (19) and deleting the constant term , and then Linearization of the system about the origin, we obtain,
, and then Linearization of the system about the origin, we obtain,
 (20)
(20)
where

Now, using the linear system theory, the choice of  and
and  ensures that the matrix A is Hurwitz for all the parameter perturbations on
ensures that the matrix A is Hurwitz for all the parameter perturbations on ,
,  and all
and all , and then x = 0 is an exponentially stable equilibrium point of the system (20). Therefore, for any given positive define symmetric matrix Q there exists a unique positive define symmetric matrix P that satisfied Lyapunov equation
, and then x = 0 is an exponentially stable equilibrium point of the system (20). Therefore, for any given positive define symmetric matrix Q there exists a unique positive define symmetric matrix P that satisfied Lyapunov equation , and then the Lyapunov function in Assumption 3 can be taken as
, and then the Lyapunov function in Assumption 3 can be taken as . Thus, taking
. Thus, taking ,
,  ,
, and choosing
and choosing , such that
, such that  holds for all a > 0, c > 0 and
holds for all a > 0, c > 0 and , and then a globally exponentially stable controller can be given as,
, and then a globally exponentially stable controller can be given as,

By taking ,
,  ,
,  ,
,  ,
,  , and
, and , and then solving the Lyapunov equation
, and then solving the Lyapunov equation , we obtain,
, we obtain,
where
 and
and 
In simulation, the normal parameters are  and
and . In the perturbed case,
. In the perturbed case,  and
and  are reduced to 0.5 and 5, respectively, corresponding to doubling of the mass. Moreover, we consider an additive impulselike disturbance
are reduced to 0.5 and 5, respectively, corresponding to doubling of the mass. Moreover, we consider an additive impulselike disturbance  of magnitude 60 acting on the system input between 18 s and 19 s.
of magnitude 60 acting on the system input between 18 s and 19 s.
Figure 3 showed the simulation results under normal (solid line) and perturbed (dashed line) cases. The following observations can be made: under the normal and perturbed cases, the optimum response in the whole domain of interest can all be achieved by a set of the same control gains, even under the case that the payload is changed abruptly. This demonstrates that general concave integral control has strong robustness, fast convergence and good flexibility and can effectively deal with unknown exogenous disturbances, nonlinearity and uncertainties of dynamics.
5. Conclusions
A class of fire-new general integral control named gen-
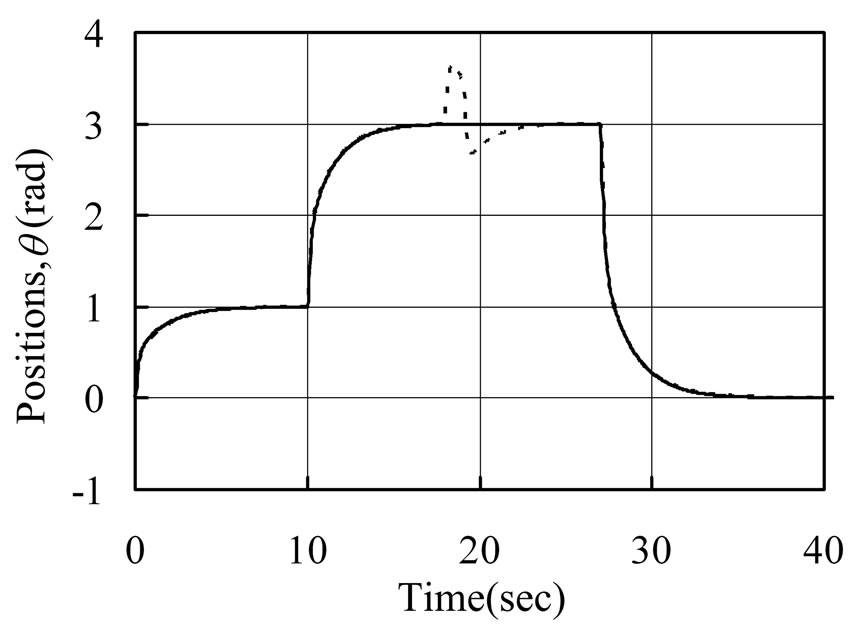
Figure 3. System output under normal (solid line) and perturbed case (dashed line).
eral concave integral control was proposed in this paper. The main contributions are as follows: 1) the partial derivative of a class of general Lyapunov function is firstly introduced into the integrator design; 2) the bounded integral control action and concave function gain integrator are normalized; 3) a general strategy to transform ordinary control into general integral control is proposed; 4) by using Lyapunov method and LaSalle’s invariance principle, the theorem to ensure regionally as well as semi-globally asymptotic stability is established only by some bounded information. Moreover, the highlight point of this integral control strategy is that the integrator output could tend to infinity but the integral control action is finite. Therefore, a simple and ingenious method to design general integral control is founded.
In this note, only a class of general integral control was presented. It is clear that we can not expect one particular procedure to apply to all system. Therefore, new design techniques for general integral control are needed to solve the wider theoretical and practical problems.
REFERENCES
- H. K. Khalil, “Universal Integral Controllers for Minimum-Phase Nonlinear Systems,” IEEE Transactions on Automatic Control, Vol. 45, No. 3, 2000, pp. 490-494. http://dx.doi.org/10.1109/9.847730
- N. J. Krikelis and S. K. Barkas, “Design of Tracking Systems Subject to Actuator Saturation and Integrator Windup,” International Journal of Control, Vol. 39, No. 4, 1984, pp. 667-682. http://dx.doi.org/10.1080/00207178408933196
- R. Hanus, M. Kinnaert and J. L. Henrotte, “Conditioning Technique, a General Anti-windup and Bumpless Transfer Method,” Automatica, Vol. 23, No. 6, 1987, pp. 729- 739. http://dx.doi.org/10.1016/0005-1098(87)90029-X
- Y. Peng, D. Varanceic and R. Hanus, “Anti-windup, Bumpless, and Conditioned Transfer Techniques for PID Controllers,” IEEE Control Systems Magazine, Vol. 16, No. 4, 1996, pp. 48-57. http://dx.doi.org/10.1109/37.526915
- Y. Y. Cao, Z. L. Lin and G. W. David, “Anti-Windup Design of Output Tracking Systems Subject to Actuator Saturation and Constant Disturbances,” Automatica, Vol. 40, No. 7, 2004, pp. 1221-1228. http://dx.doi.org/10.1016/j.automatica.2004.02.012
- N. Marchand and A. Hably, “Global Stabilization of Multiple Integrators with Bounded Controls,” Automatica, Vol. 41, No. 12, 2005, pp. 2147-2152. http://dx.doi.org/10.1016/j.automatica.2005.07.004
- S. Seshagiri and H. K. Khalil, “Robust Output Feedback Regulation of Minimum-Phase Nonlinear Systems Using Conditional Integrators,” Automatica, Vol. 41, 2005, pp. 43-54.
- K. J. Åstrom and L. Rundquist, “Integrator Windup and How to Avoid It,” Proceedings of the 1989 American Control Conference, Pittsburgh, 21-23 June 1989, pp. 1693-1698.
- S. M. Shahruz and A. L. Schwartz, “Design and Optimal Tuning of Nonlinear PI Compensators,” Journal of Optimization Theory and Applications, Vol. 83, No. 1, 1994, pp. 181-198. http://dx.doi.org/10.1007/BF02191768
- A. S. Hodel and C. E. Hall, “Variable-structure PID Control to Prevent Integrator Windup,” IEEE Transactions on Industrial Electronics, Vol. 48, 2001, pp. 442-451. http://dx.doi.org/10.1109/41.915424
- Y. Matsuda and N. Ohse, “An Approach to Synthesis of Low Order Dynamic Anti-windup Compensations for Multivariable PID Control Systems with Input Saturation,” Proceedings of the 2006 Joint SICE-ICASE Conference, Busan, 18-21 October 2006, pp. 988-993. http://dx.doi.org/10.1109/SICE.2006.315736
- S. M. Shahruz and A. L. Schwartz, “Nonlinear PI Compensators that Achieve High Performance,” Journal of Dynamic Systems, Measurement and Control, Vol. 119, No. 1, 1997, pp. 105-110. http://dx.doi.org/10.1115/1.2801198
- R. Kelly, “Global Positioning of Robotic Manipulators via PD Control Plus a Class of Nonlinear Integral Actions,” IEEE Transactions on Automatic Control, Vol. 43, No. 7, 1998, pp. 934-938. http://dx.doi.org/10.1109/9.701091
- S. Tarbouriech, C. Pittet and C. Burgat, “Output Tracking Problem for Systems with Input Saturations via Nonlinear Integrating Actions,” International Journal of Robust and Nonlinear Control, Vol. 10, No. 6, 2000, pp. 489-512. http://dx.doi.org/10.1002/(SICI)1099-1239(200005)10:6<489::AID-RNC489>3.0.CO;2-D
- B. G. Hu, “A Study on Nnonlinear PID Controllers— Proportional Component Approach,” Acta Automatica Sinica, Vol. 32, 2006, pp. 219-227.
- C. Q. Huang, X. F. Peng and J. P. Wang, “Robust Nonlinear PID Controllers for Anti-Windup Design of Robot Manipulators with an Uncertain Jacobian Matrix,” Acta Automatica Sinica, Vol. 34, 2008, pp. 1113-1121.
- B. S. Liu and B. L. Tian, “General Integral Control,” Proceedings of the International Conference on Advanced Computer Control, Singapore, 22-24 January 2009, pp. 136-143. http://dx.doi.org/10.1109/ICACC.2009.30
- B. S. Liu and B. L. Tian, “General Integral Control Design Based on Linear System Theory,” Proceedings of the 3rd International Conference on Mechanic Automation and Control Engineering, Baotou, Vol. 5, 2012, pp. 3174- 3177.
- B. S. Liu and B. L. Tian, “General Integral Control Design Based on Sliding Mode Technique,” Proceedings of the 3rd International Conference on Mechanic Automation and Control Engineering, Baotou, Vol. 5, 2012, pp. 3178-3181.
- B. S. Liu, J. H. Li and X. Q. Luo, “General Integral Control Design via Feedback Linearization,” Accepted by Intelligent Control and Automation.
- H. K. Khalil, “Nonlinear Systems,” 3rd Edition, Electronics Industry Publishing, Beijing, 2007, pp. 126-128, 482-484.