International Journal of Modern Nonlinear Theory and Application
Vol.3 No.3(2014), Article ID:47823,11 pages
DOI:10.4236/ijmnta.2014.33010
Transient Stability Analysis during an Improved Coupling Procedure for an Induction Generator Based Wind Generation System to the Grid
Soulaymen Kammoun*, Amal Marrekchi, Souhir Sallem, Mohamed Ben Ali Kammoun
Commande des Machines Electriques et Réseauxde Puissance (CMERP), University of Sfax, Sfax, Tunisia
Email: *soulaymen.kammoun@gmail.com, amal.marrekchi@gmail.com, souhirsallem@gmail.com, mbakammoun@gmail.com
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/
![]()
![]()

Received 20 May 2014; revised 18 June 2014; accepted 3 July 2014
ABSTRACT
For fixed speed wind turbines, the connection of its squirrel cage induction generator (SCIG) to the grid leads to inrush current which can reach an average of 2 p.u. up to 2.5 p.u. in higher wind speed even by using a soft starter. We propose in this paper a new soft starting of squirrel cage induction generator based wind turbine connected to the grid. Our strategy overcomes such transient instability problems and pinpoints rapidly synchronous speed regardless the wind speed acting on pitch angle. The proposed strategy ensures at least 50% reduction of inrush current and 18% gain of WTG starting time. A state model of the system is given including the wind turbine model and the SCIG model in the synchronous reference frame. Simulation results are analysed and compared to the classic coupling procedure.
Keywords:Wind Energy, Pitch Control, Squirrel Cage Induction Generator, Transient Stability, Soft Starting

1. Introduction
Recently, there has been a world-wide interest in wind energy since it is becoming the world’s fastest growing energy source with an average growth over the past 7 years of 26% and a 12% foreseeable penetration of global electricity demand by 2020 [1] .
Several wind turbine generator (WTG) concepts have been developed during the last years. The main purpose of research on these concepts has been especially about maximizing energy capture, minimizing cost, and improving energy produced quality [2] -[6] .
Among these various concepts, the squirrel cage induction generator (SCIG) based WTG. Known also as the fixed speed, pitch controlled WTG.
The WTGs with fixed speed are also consisted of a large number of compensating capacitors, operating on an internal electrical network in order to provide reactive power requirements of SCIGs (for a wind farm) and improving the power factor of the energy fed to the grid.
A lot of recent research focused on modelling/simulation of this WTG type [7] -[11] . Modelling and simulation allow researchers to predict unwanted phenomena not only for transient state but also for permanent state of the system.
One important phenomenon is the important inrush current into the SCIG during connection to the grid, as has traditionally been the most important feature of soft-starters [12] , and this, in order to improve the overall transient stability. Nevertheless, this transient stability can meet further improvement by ensuring a stable system even before coupling. However, traditional coupling methods consist on starting the wind turbine, when the wind speed allows it, and connecting to the grid in an acceleration phase whenever the speed reaches approximately the synchronism.
Yet there is a dearth of information about the coupling moment in order to optimize transient stability. Therefore, the present study offers an improved starting/coupling procedure, where WTG is started unloaded near the synchronism speed in a steady state.
The remainder of this paper is divided into four sections. Section 2 gives the description and a modelling of the system components. In Section 3, we develop steps of the starting-coupling strategy. Simulation results of this method are presented and discussed in Section 4. A conclusion of this study is presented in the last section.
2. System Description and Modelling
The studied WTG concept is known as the Danish concept [13] . It consists of a turbine rotor coupled to a soft-started grid-connected SCIG through a gearbox. Figure 1 illustrates a single line representation of the last.
2.1. Wind Turbine Model
The functioning of a wind turbine can be described by modeling the rotational mechanism. Applying the actuator disk theory [1] , the rotor model provides the mechanical torque extracted from the wind by Equation (1):
 (1)
(1)
where
 (m) is the rotor disk radius,
(m) is the rotor disk radius,
 (m/s) is the wind speed,
(m/s) is the wind speed,
 is the gearbox ratio and
is the gearbox ratio and
 (W) is the mechanical power which given by Equation (2)
(W) is the mechanical power which given by Equation (2)
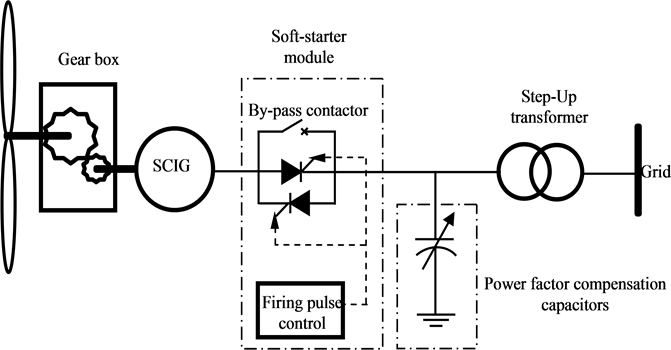
Figure 1. Single line diagram of a WTG equiped with a SCIG.
![]() (2)
(2)
where
 (Kg/m3) is the air density and
(Kg/m3) is the air density and
 is the power coefficient (Beltz coefficient) which is a function of the tip speed
ratio
is the power coefficient (Beltz coefficient) which is a function of the tip speed
ratio
 (given by Equation (3)) and the blade pitch angle
(given by Equation (3)) and the blade pitch angle
 and given by Equation (4).
and given by Equation (4).
 (3)
(3)
 (4)
(4)
 is the turbine speed (rd/s),
is the turbine speed (rd/s),
 are given in Table 1 and
are given in Table 1 and
 is given by Equation (5)
is given by Equation (5)
 (5)
(5)
2.2. SCIG Model
Adopting generator convention and choosing a reference linked to the stator pulsation then the synchronous frame, mathematical model of the SCIG [14] -[16] is given by Equations (6)-(8).
• Electrical equations
 (6)
(6)
• Magnetic equations
 (7)
(7)
• Mechanical equation
 (8)
(8)
2.3. Soft Starter Model
A soft-starter is basically an AC/AC converter, where for firing angles smaller
than
![]() rad, the relationship between the firing angle and the controlled voltage is non-linear
and depends additionally on the power factor of the connected element. The power
factor depends in turn in this controlled voltage and its variation and other generator
characteristics [17] . This non-linearity makes
it not feasible to obtain the supplied voltage versus firing angle characteristic
in the state model. A continuous model of the last where relation between RMS output
and input voltages for a delayed current (case of the SCIG) is given by Equation
(9) [18] :
rad, the relationship between the firing angle and the controlled voltage is non-linear
and depends additionally on the power factor of the connected element. The power
factor depends in turn in this controlled voltage and its variation and other generator
characteristics [17] . This non-linearity makes
it not feasible to obtain the supplied voltage versus firing angle characteristic
in the state model. A continuous model of the last where relation between RMS output
and input voltages for a delayed current (case of the SCIG) is given by Equation
(9) [18] :

Table 1.
 coefficients values.
coefficients values.
 (9)
(9)
where
 is the firing angle of thyristors,
is the firing angle of thyristors,
 is the current delay relative to the voltage and
is the current delay relative to the voltage and .
.
Figure 2 shows
 versus firing angle for a 20˚ delayed current.
versus firing angle for a 20˚ delayed current.
3. Starting Method
3.1. Data Analyses
Traditionally, whenever the wind speed exceeds the cut-in speed, WTGs are started unloaded. The pitch angle used, issued from a regulation loop, is generated in order to give maximum mechanical power.
Using Equations (1), (2) and only the mechanical Equation of the SCIG (8) (No connection with the grid means no electrical equations) gives us the WTG unloaded model. Figure 3 and Figure 4 illustrate respectively the evolution of the mechanical torque and the rotor speed of a given wind speed and pitch angle.
It is clear in Figure 4 that the rotor speed reaches its steady state when the mechanical torque in Figure 3 returns to zero.
Analyzing the WTG unloaded functioning; it is obvious that pitch angle affects directly the mechanical torque (Figure 5) then the rotor speed (Figure 6).
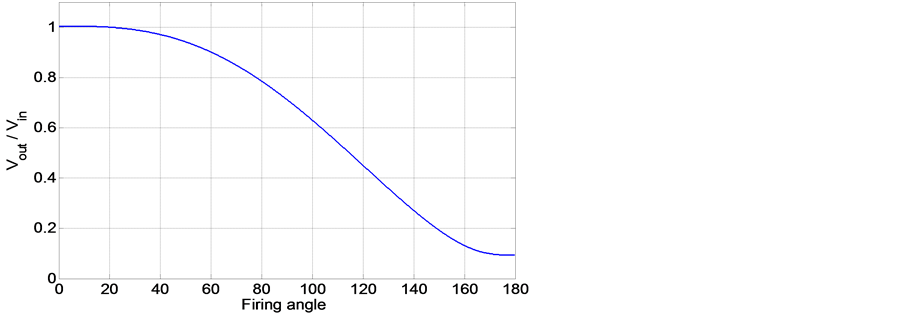
Figure 2. Soft-starter layout for a 20˚ delayed current.
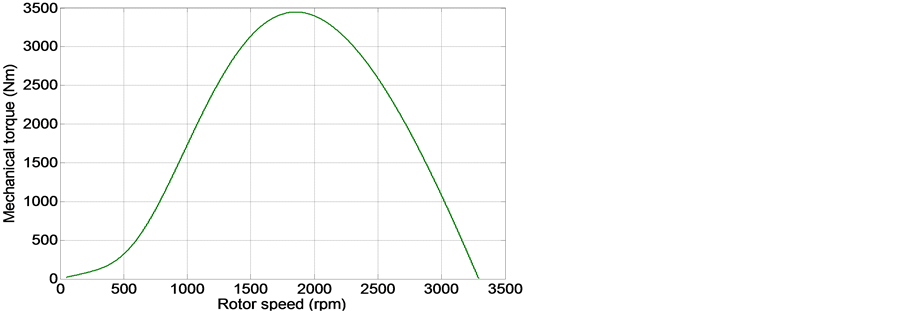
Figure 3. Evolution of the unloaded WTG’s mechanical torque.
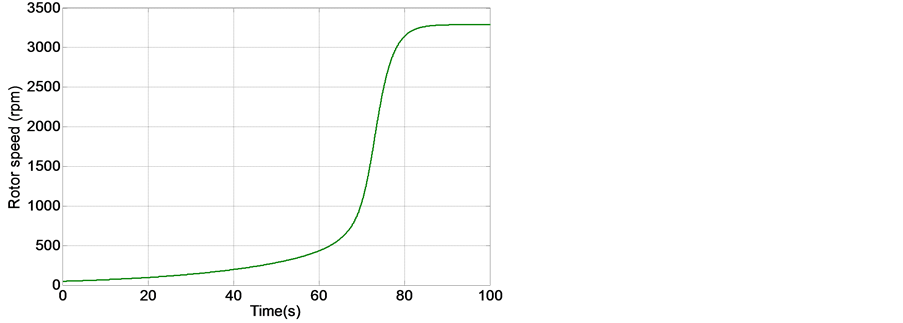
Figure 4. Evolution of the unloaded WTG’s rotor speed.
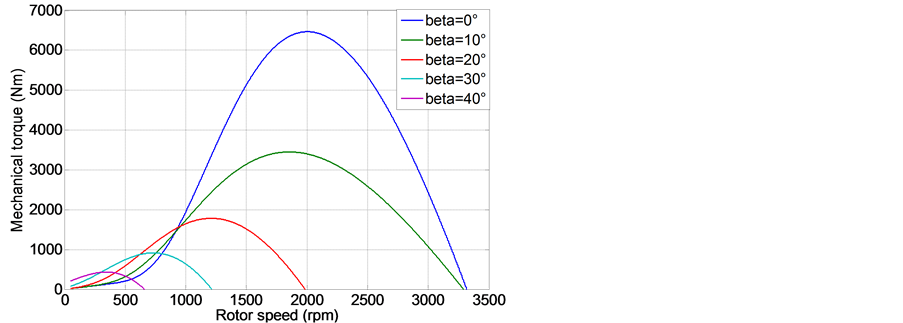
Figure 5. Evolution of the unloaded WTG’s mechanical torque for different pitch angles.
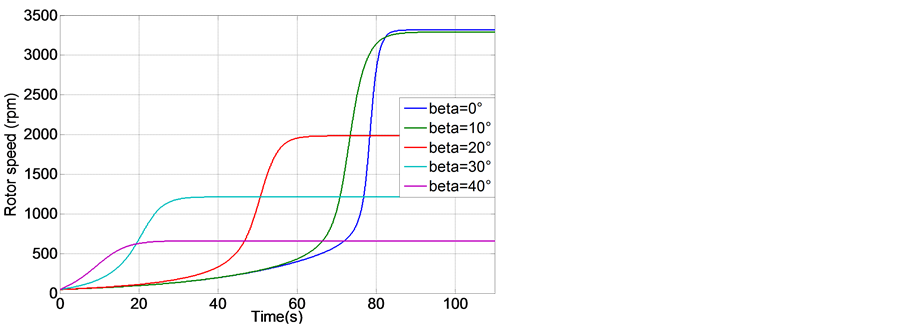
Figure 6. Evolution of the unloaded WTG’s rotor speed for different pitch angles.
Therefore, we can deduce that for each wind speed exists a specific pitch angle where the rotor speed steady state is the closest to the synchronism speed.
3.2. Transient Stability Improvement
In order to improve transient stability of the wind generation system by avoiding inrush currents, we propose to verify two specific conditions before connecting to the grid:
· A zero mechanical torque;
· The closest rotor speed value just above the synchronism speed.
The need of these two conditions comes from the fact that the difference between the two torques (mechanical and electromagnetic) is zero just in the coupling moment.
That way, no big variation in the rotor speed neither in the torques could happen throughout the soft-starting operation, therefore a stable connection is guaranteed.
From Figure 5 and Figure 6, these two conditions are verified together only after the speed reaches its steady state for a specific wind speed and pitch angle.
3.3. Starting Pitch Angle Determination
The present study comes to propose an algorithm with the ability of determining the corresponding starting pitch angle. This algorithm is set up to work off-line based in WTG characteristics.
Beyond cut-in speed and till cut-off speed a look up table is generated with corresponding
starting pitch angle for the given wind speed interval
 within pitch angle variation
within pitch angle variation
 limits.
limits.
Figure 7 gives the flowchart of the algorithm giving starting pitch angel. Figure 8 gives the breakpoints issued from the algorithm of the proposed starting pitch angle versus wind speed.
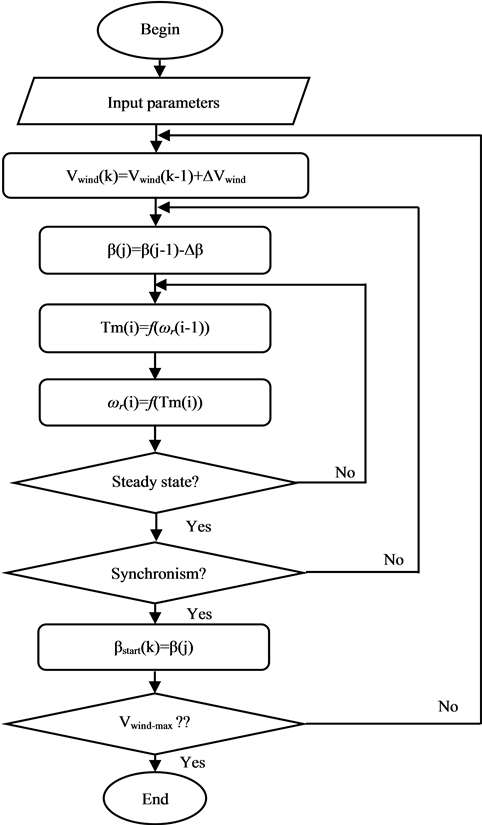
Figure 7. Starting pitch angle determination flowchart.
3.4. Proposed Procedure
On this paper, a starting procedure divided into four steps is proposed:
• Starting the WTG with the starting pitch angle issued from the look up table corresponding to the available wind.
• Once steady state reached, WTG is switched on the grid throughout the soft starter by decreasing firing angles of thyristors within a specific law.
• After soft starting procedure is completed, each line triacs is by-passed by a mechanical contactor.
• Pitch angle is modified again in order to extract maximum power from the wind.
4. Results and Discussion
To evince the efficiency and performance of the proposed starting procedure, we compare it to the classic one. The classical procedure consists of starting the wind turbine unloaded with the available wind and a pitch angle giving maximum power corresponding to this wind speed. Once synchronism reached, the WTG is coupled to the grid through the soft-starter. Firing angle control is done on a way to reduce inrush current to the maximum.
Considering a 10 m/s wind speed, the following simulation results was based on a WT and SCIG which characteristics, token from [19] , are summarized in Table2
The starting pitch angle issued from the algorithm given in Figure 7 is 25 degrees for the given wind speed to be brought back after the connection to 2 degrees (pitch angle giving maximum mechanical power).
Figure 9 and Figure 10 show respectively mechanical and electromagnetic torques and speed on the rotor shaft of the SCIG.
It is obvious by these figures that our strategy offers more stability when connecting the SCIG to the grid. Moreover, the pitch angle pinpoints the speed to the corresponding synchronous speed faster than the classical strategy.
This prevent the electromagnetic torque exceeding and thus generated current which never cross 1 p.u. in
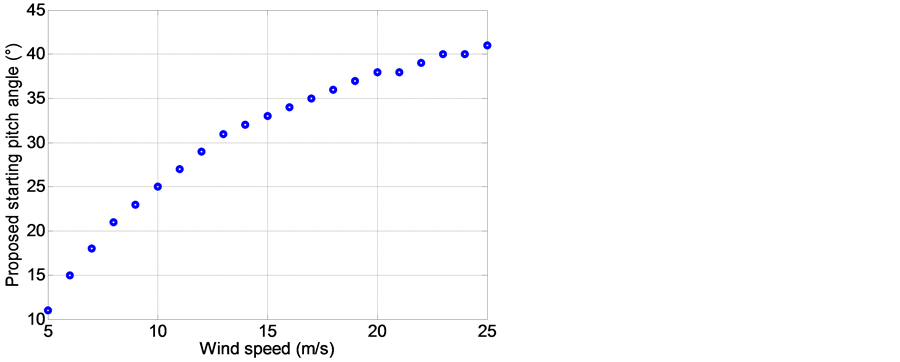
Figure 8. Starting pitch angle versus wind speed.
Table 2. WTG characteristics.
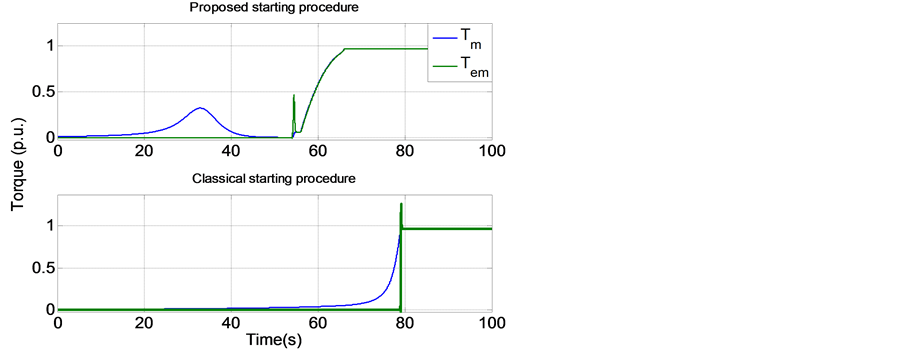
Figure 9. Evolution of WTG torques.
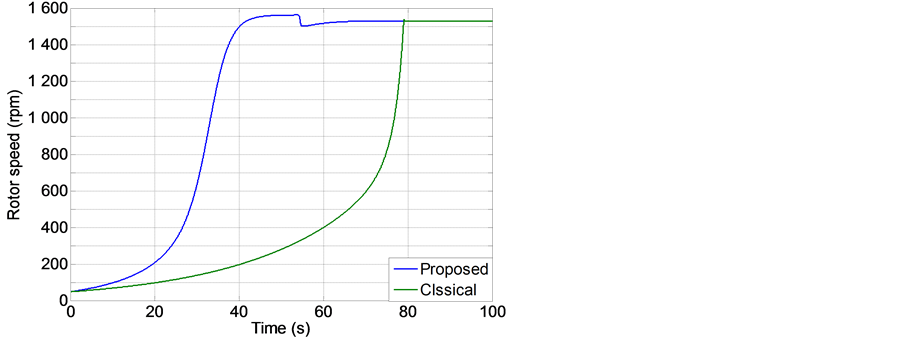
Figure 10. Evolution of WTG rotor speed.
NOTES

*Corresponding author.