Open Journal of Applied Sciences
Vol.07 No.07(2017), Article ID:77786,17 pages
10.4236/ojapps.2017.77028
Computing Structured Singular Values for Delay and Polynomial Eigenvalue Problems
Mutti-Ur Rehman1, Danish Majeed2, Naila Nasreen3, Shabana Tabassum1
1Department of Mathematics and Statistics, The University of Lahore, Gujrat Campus, Gujrat, Pakistan
2Department of Applied Physics, Federal Urdu University of Arts, Science and Technology, Islamabad, Pakistan
3Department of Mathematics, COMSATS Institute of Information Technology Islamabad Campus, Islamabad, Pakistan

Copyright © 2017 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/



Received: April 27, 2017; Accepted: July 18, 2017; Published: July 21, 2017
ABSTRACT
In this article the computation of the Structured Singular Values (SSV) for the delay eigenvalue problems and polynomial eigenvalue problems is presented and investigated. The comparison of bounds of SSV with the well-known MATLAB routine mussv is investigated.
Keywords:
m-Values, Block Diagonal Uncertainties, Spectral Radius, Low-Rank Approximation, Delay Eigenvalue Problems, Polynomial Eigenvalue Problems

1. Introduction
The m-values [1] is an important mathematical tool in control theory; it allows discussing the problem arising in the stability analysis and synthesis of control systems to quantify the stability of a closed-loop linear time-invariant systems subject to structured perturbations. The structures addressed by the SSV is very general and allows covering all types of parametric uncertainties that can be incorporated into the control system by using real and complex Linear Fractional Transformations LFT’s. For more detail please see [1] - [7] and the references therein for the applications of SSV.
The versatility of the SSV comes at the expense of being notoriously hard, in fact Non-deterministic Polynomial time that is NP hard [8] to compute. The numerical algorithms which are being used in practice provide both upper and lower bounds of SSV. An upper bound of the SSV provides sufficient conditions to guarantee robust stability analysis of feedback systems, while a lower bound provides sufficient conditions for instability analysis of the feedback systems.
The widely used function mussv available in the Matlab Control Toolbox computes an upper bound of the SSV using diagonal balancing and Linear Matrix Inequality techniques [9] [10] . The lower bound is computed by using the generalization of power method developed in [11] [12] .
In this paper the comparison of numerical results to approximate the lower bounds of the SSV associated with mixed real and pure complex uncertainties is presented.
Overview of the article. Section 2 provides the basic framework. In particular, it explains how the computation of the SSV can be addressed by an inner-outer algorithm, where the outer algorithm determines the perturbation level  and the inner algorithm determines a (local) extremizer of the structured spectral value set. In Section 3 it is explained that how the inner algorithm works for the case of pure complex structured perturbations. An important characterization of extremizers shows that one can restrict himself to a manifold of structured perturbations with normalized and low-rank blocks. A gradient system for finding extremizers on this manifold is established and analyzed. The outer algorithm is addressed in Section 4, where a fast Newton iteration for determining the correct perturbation level
and the inner algorithm determines a (local) extremizer of the structured spectral value set. In Section 3 it is explained that how the inner algorithm works for the case of pure complex structured perturbations. An important characterization of extremizers shows that one can restrict himself to a manifold of structured perturbations with normalized and low-rank blocks. A gradient system for finding extremizers on this manifold is established and analyzed. The outer algorithm is addressed in Section 4, where a fast Newton iteration for determining the correct perturbation level  is developed. Finally, Section 5 presents a range of numerical experiments to compare the quality of the lower bounds to those obtained with mussv.
is developed. Finally, Section 5 presents a range of numerical experiments to compare the quality of the lower bounds to those obtained with mussv.
2. Framework
Consider a matrix  where
where  and an underlying perturba- tion set with prescribed block diagonal structure,
and an underlying perturba- tion set with prescribed block diagonal structure,
 (1)
(1)
where  denotes the
denotes the  identity matrix. Each of the scalars
identity matrix. Each of the scalars  and the
and the  matrices
matrices  may be constrained to stay real in the definition of
may be constrained to stay real in the definition of . The integer N denotes the number of repeated scalar blocks (that is, scalar multiples of the identity) and F denotes the number of full blocks. This implies
. The integer N denotes the number of repeated scalar blocks (that is, scalar multiples of the identity) and F denotes the number of full blocks. This implies . In order to distinguish complex and real scalar blocks, assume that the first
. In order to distinguish complex and real scalar blocks, assume that the first  blocks are complex while the (possibly) remaining
blocks are complex while the (possibly) remaining  blocks are real. Similarly assume that the first
blocks are real. Similarly assume that the first  full blocks are complex and the remaining
full blocks are complex and the remaining  blocks are real. The literature (see, e.g., [1] ) usually does not consider real full blocks, that is,
blocks are real. The literature (see, e.g., [1] ) usually does not consider real full blocks, that is, . In fact, in control theory, full blocks arise from uncertainties associated to the frequency response of a system, which is complex-valued.
. In fact, in control theory, full blocks arise from uncertainties associated to the frequency response of a system, which is complex-valued.
For simplicity, assume that all full blocks are square, although this is not necessary and our method extends to the non-square case in a straightforward way. Similarly, the chosen ordering of blocks should not be viewed as a limiting assumption; it merely simplifies notation.
The following definition is given in [1] , where  denotes the matrix 2-norm and
denotes the matrix 2-norm and  the
the  identity matrix.
identity matrix.
Definition 2.1. [13] . Let  and consider a set
and consider a set . Then the SSV (or m-value)
. Then the SSV (or m-value)  is defined as
is defined as
 (2)
(2)
In Definition 2.1,  denotes the determinant of a matrix and in the following we make use of the convention that the minimum over an empty set is
denotes the determinant of a matrix and in the following we make use of the convention that the minimum over an empty set is . In particular,
. In particular,  if
if  for all
for all .
.
Note that  is a positively homogeneous function, i.e.,
is a positively homogeneous function, i.e.,

For , it follows directly from Definition 2.1 that
, it follows directly from Definition 2.1 that .For general
.For general , the SSV can only become smaller and thus gives us the upper bound
, the SSV can only become smaller and thus gives us the upper bound . This can be refined further by exploiting the properties of
. This can be refined further by exploiting the properties of , see [14] . These relations between
, see [14] . These relations between  and
and , the largest singular value of A, justifies the name structured singular value for
, the largest singular value of A, justifies the name structured singular value for .
.
The important special case when  only allows for complex perturb- ations, that is,
only allows for complex perturb- ations, that is,  and
and , deserves particular attention. In this case one can write
, deserves particular attention. In this case one can write  instead of
instead of . Note that
. Note that  implies
implies  for any
for any . In turn, there is
. In turn, there is  such that
such that  if and only if there is
if and only if there is , with the same norm, such that
, with the same norm, such that  has the eigenvalue 1, which implies
has the eigenvalue 1, which implies . This gives the following altern- ative expression:
. This gives the following altern- ative expression:
 (3)
(3)
where  denotes the spectral radius of a matrix. For any nonzero eigenvalue
denotes the spectral radius of a matrix. For any nonzero eigenvalue  of A, the matrix
of A, the matrix  satisfies the constraints of the minimization problem shown in Equation (3). This establishes the lower bound
satisfies the constraints of the minimization problem shown in Equation (3). This establishes the lower bound
 for the case of purely complex perturbations. Note that
for the case of purely complex perturbations. Note that  for
for . Hence, both the spectral radius and the
. Hence, both the spectral radius and the
matrix 2-norm are included as special cases of the SSV.
2.1. A Reformulation Based on Structured Spectral Value Sets [13]
The structured spectral value set of  with respect to a perturbation level
with respect to a perturbation level  is defined as
is defined as
 (4)
(4)
where  denotes the spectrum of a matrix. Note that for purely complex
denotes the spectrum of a matrix. Note that for purely complex , the set
, the set  is simply a disk centered at 0. The set
is simply a disk centered at 0. The set
 (5)
(5)
allows us to express the SSV defined in Equation (2) as
 (6)
(6)
that is, as a structured distance to singularity problem. This gives us that  if and only if
if and only if .
.
For a purely complex perturbation set , one can use Equation (3) to alternatively express the SSV as
, one can use Equation (3) to alternatively express the SSV as
 (7)
(7)
where  and one can have that
and one can have that , where
, where  deno- tes the open complex unit disk, if and only if
deno- tes the open complex unit disk, if and only if .
.
2.2. Problem under Consideration [13]
Let us consider the minimization problem
 (8)
(8)
where  for some fixed
for some fixed . By the discussion above, the SSV,
. By the discussion above, the SSV,  is the reciprocal of the smallest value of
is the reciprocal of the smallest value of  for which
for which . This suggests a two-level algorithm: In the inner algorithm, we attempt to solve Equation (8). In the outer algorithm, we vary
. This suggests a two-level algorithm: In the inner algorithm, we attempt to solve Equation (8). In the outer algorithm, we vary  by an iterative procedure which exploits the knowledge of the exact derivative of an extremizer say
by an iterative procedure which exploits the knowledge of the exact derivative of an extremizer say  with respect to
with respect to . We address Equation (8) by solving a system of Ordinary Differential Equations (ODE’s). In general, this only yields a local minimum of Equation (8) which, in turn, gives an upper bound for
. We address Equation (8) by solving a system of Ordinary Differential Equations (ODE’s). In general, this only yields a local minimum of Equation (8) which, in turn, gives an upper bound for  and hence a lower bound for
and hence a lower bound for . Due to the lack of global optimality criteria for Equation (8), the only way to increase the robustness of the method is to compute several local optima.
. Due to the lack of global optimality criteria for Equation (8), the only way to increase the robustness of the method is to compute several local optima.
The case of a purely complex perturbation set  can be addressed ana- logously by letting the inner algorithm to determine a local optima for
can be addressed ana- logously by letting the inner algorithm to determine a local optima for
 (9)
(9)
where  which then yields a lower bound for
which then yields a lower bound for .
.
3. Pure Complex Perturbations [13]
In this section, we consider the solution of the inner problem discussed in
Equation (9) in the estimation of  for
for  and a purely complex
and a purely complex
perturbation set
 (10)
(10)
3.1. Extremizers
Now, make use of the following standard eigenvalue perturbation result, see, e.g., [15] . Here and in the following, denote .
.
Lemma 3.1. Consider a smooth matrix family  and let
and let  be an eigenvalue of
be an eigenvalue of  converging to a simple eigenvalue
converging to a simple eigenvalue  of
of  as
as . Then
. Then  is analytic near
is analytic near  with
with
where  and
and  are right and left eigenvectors of
are right and left eigenvectors of  associated to
associated to , that is,
, that is,  and
and .
.
Our goal is to solve the maximization problem discussed in Equation (9), which requires finding a perturbation  such that
such that  is maximal among all
is maximal among all  with
with . In the following we call
. In the following we call  a largest eigenvalue if
a largest eigenvalue if  equals the spectral radius.
equals the spectral radius.
Definition 3.2. [13] . A matrix  such that
such that  and
and  has a largest eigenvalue that locally maximizes the modulus of
has a largest eigenvalue that locally maximizes the modulus of  is called a local extremizer.
is called a local extremizer.
The following result provides an important characterization of local extre- mizers.
Theorem 3.3. [13] . Let

be a local extremizer of . Assume that
. Assume that  has a simple largest eigenvalue
has a simple largest eigenvalue , with the right and left eigenvectors
, with the right and left eigenvectors  and
and  scaled such that
scaled such that . Partitioning
. Partitioning
 (11)
(11)
such that the size of the components  equals the size of the kth block in
equals the size of the kth block in , additionally assume that
, additionally assume that
 (12)
(12)
 (13)
(13)
then

that is, all blocks of  have unit 2-norm.
have unit 2-norm.
The following theorem allows us to replace full blocks in a local extremizer by rank-1 matrices.
Theorem 3.4. [13] . Let  be a local ext- remizer and let
be a local ext- remizer and let  be defined and partitioned as in Theorem 3.3. Assuming that Equation (13) holds, every block
be defined and partitioned as in Theorem 3.3. Assuming that Equation (13) holds, every block  has a singular value 1 with associated
has a singular value 1 with associated
singular vectors  and
and  for some
for some
 . Moreover, the matrix
. Moreover, the matrix

is also a local extremizer, i.e., .
.
Remark 3.1. [13] . Theorem 3.3 allows us to restrict the perturbations in the structured spectral value set shown in Equation (4) to those with rank-1 blocks, which was also shown in [1] . Since the Frobenius and the matrix 2-norms of a rank-1 matrix are equal, one can equivalently search for extremizers within the submanifold
 (14)
(14)
3.2. A system of ODEs to Compute Extremal Points of  [13]
[13]
In order to compute a local maximizer for , with
, with , First construct a matrix valued function
, First construct a matrix valued function  such that a largest eigenvalue
such that a largest eigenvalue  of
of  has maximal local increase. Then derive a system of ODEs satisfied by this choice of
has maximal local increase. Then derive a system of ODEs satisfied by this choice of .
.
Orthogonal projection onto . In the following, we make use of the Frobenius inner product
. In the following, we make use of the Frobenius inner product  for two
for two  matrices
matrices . Let
. Let
 (15)
(15)
denote the orthogonal projection, with respect to the Frobenius inner product, of a matrix  onto
onto . To derive a compact formula for this projection, use the pattern matrix
. To derive a compact formula for this projection, use the pattern matrix
 (16)
(16)
where  denotes the
denotes the  -matrix of all ones.
-matrix of all ones.
Lemma 3.5. [13] . For , let
, let

denote the block diagonal matrix obtained by entrywise multiplication of C with
the matrix  defined in Equation (20). Then the orthogonal projection of C
defined in Equation (20). Then the orthogonal projection of C
onto  is given by
is given by
 (17)
(17)
where , and
, and .
.
The local optimization problem [13] . Let us recall the setting from Section (3.1): assume that  is a simple eigenvalue with eigenvectors
is a simple eigenvalue with eigenvectors  normalized such that
normalized such that
 (18)
(18)
As a consequence of Lemma 3.1, see also Equation (15), to have
 (19)
(19)
where  and the dependence on t is intentionally omitted.
and the dependence on t is intentionally omitted.
Letting , with
, with  as in Equation (18), now we aim at determ- ining a direction
as in Equation (18), now we aim at determ- ining a direction  that locally maximizes the increase of the modulus of
that locally maximizes the increase of the modulus of . This amounts to determining
. This amounts to determining
 (20)
(20)
as a solution of the optimization problem

 (21)
(21)
The target function in Equation (20) follows from Equation (19), while the constraints in Equation (21) ensure that  is in the tangent space of
is in the tangent space of  at
at . In particular Equation (20) implies that the the norms of the blocks of
. In particular Equation (20) implies that the the norms of the blocks of  are conserved. Note that Equation (20) only becomes well-posed after imposing an additional normalization on the norm of U. The scaling chosen in the following lemma aims at
are conserved. Note that Equation (20) only becomes well-posed after imposing an additional normalization on the norm of U. The scaling chosen in the following lemma aims at .
.
Lemma 3.6. [13] . With the notation introduced above and  partitioned as in Equation (11), a solution of the optimization problem discussed in Equa- tion (20) is given by
partitioned as in Equation (11), a solution of the optimization problem discussed in Equa- tion (20) is given by
 (22)
(22)
with
 (23)
(23)
 (24)
(24)
Here,  is the reciprocal of the absolute value of the right-hand side in Equation (23), if this is different from zero, and
is the reciprocal of the absolute value of the right-hand side in Equation (23), if this is different from zero, and  otherwise. Similarly,
otherwise. Similarly,  is the reciprocal of the Frobenius norm of the matrix on the right hand side in Equation (24), if this is different from zero, and
is the reciprocal of the Frobenius norm of the matrix on the right hand side in Equation (24), if this is different from zero, and  otherwise. If all right-hand sides are different from zero then
otherwise. If all right-hand sides are different from zero then .
.
Corollary 3.7. [13] . The result of Lemma 3.6 can be expressed as
 (25)
(25)
where  is the orthogonal projection and
is the orthogonal projection and  are diagonal
are diagonal
matrices with  positive.
positive.
Proof. The statement is an immediate consequence of Lemma 3.5.
The system of ODEs. Lemma 3.6 and Corollary 3.7 suggest to consider the following differential equation on the manifold :
:
 (26)
(26)
where  is an eigenvector, of unit norm, associated to a simple eigenvalue
is an eigenvector, of unit norm, associated to a simple eigenvalue  of
of  for some fixed
for some fixed . Note that
. Note that  depend on
depend on  as well. The differential Equation (30) is a gradient system because, by definition, the right-hand side is the projected gradient of
as well. The differential Equation (30) is a gradient system because, by definition, the right-hand side is the projected gradient of .
.
The following result follows directly from Lemmas 3.1 and 3.6.
Theorem 3.8. [13] . Let  satisfy the differential Equation (26). If
satisfy the differential Equation (26). If  is a simple eigenvalue of
is a simple eigenvalue of , then
, then  increases monotonically.
increases monotonically.
The following lemma establishes a useful property for the analysis of stationary points of Equation (26).
Lemma 3.9. [13] . Let  satisfy the differential Equation (26). If
satisfy the differential Equation (26). If  is a nonzero simple eigenvalue of
is a nonzero simple eigenvalue of , with right and left eigen- vectors
, with right and left eigen- vectors  and
and  scaled, then
scaled, then
 (27)
(27)
where .
.
Remark 3.3. The choice of ,
,  originating from Lemma 3.6., to achieve unit norm of all blocks in Equation (25), is completely arbitrary. Other choices would be also acceptable and investigating an optimal one in terms of speed of convergence to stationary points would be an interesting issue.
originating from Lemma 3.6., to achieve unit norm of all blocks in Equation (25), is completely arbitrary. Other choices would be also acceptable and investigating an optimal one in terms of speed of convergence to stationary points would be an interesting issue.
The following result characterizes stationary points of Equation (26).
Theorem 3.10. [13] . Assume that  is a solution of Equation (26) and
is a solution of Equation (26) and  is a largest simple nonzero eigenvalue of
is a largest simple nonzero eigenvalue of  with right/left eigen- vectors
with right/left eigen- vectors ,
, . Moreover, suppose that Assumptions (12) and (13) hold for
. Moreover, suppose that Assumptions (12) and (13) hold for  and
and . Then
. Then
 (28)
(28)
for a specific real diagonal matrix . Moreover if
. Moreover if  has (locally) maximal modulus over the set
has (locally) maximal modulus over the set  then D is positive.
then D is positive.
3.3. Projection of Full Blocks on Rank-1 Manifolds [13]
In order to exploit the rank-1 property of extremizers established in Theorem 3.4, one can proceed in complete analogy to [16] in order to obtain for each full block an ODE on the manifold M of (complex) rank-1 matrices. The derivation of this system of ODEs is straightforward; the interested reader can see [17] for full details.
The monotonicity and the characterization of stationary points follows analogously to those obtained for Equation (26); and also refer to [16] for the proofs. As a consequence one can use the ODE in Equation (28) instead of Equation (26) and gain in terms of computational complexity.
3.4. Choice of Initial Value Matrix and  [13]
[13]
In our two-level algorithm for determining  use the perturbation
use the perturbation  obtained for the previous value
obtained for the previous value  as the initial value matrix for the system of ODEs. However, it remains to discuss a suitable choice of the initial values
as the initial value matrix for the system of ODEs. However, it remains to discuss a suitable choice of the initial values  and
and  in the very beginning of the algorithm.
in the very beginning of the algorithm.
For the moment, let us assume that A is invertible and write

which aim to have as close as possible to singularity. To determine , one can perform an asymptotic analysis around
, one can perform an asymptotic analysis around . For this purpose, let us consider the matrix valued function
. For this purpose, let us consider the matrix valued function
and let denote  denote an eigenvalue of
denote an eigenvalue of  with smallest modulus. Letting v and w denote the right and left eigenvectors corresponding to
with smallest modulus. Letting v and w denote the right and left eigenvectors corresponding to , scaled such that
, scaled such that , Lemma 3.1 implies
, Lemma 3.1 implies
In order to have the locally maximal decrease of  at
at  choose
choose
 (29)
(29)
where the positive diagonal matrix D is chosen such that . This is always possible under the genericity assumptions (12) and (13). The orthogonal projector
. This is always possible under the genericity assumptions (12) and (13). The orthogonal projector  onto
onto  can be expressed in analogy to Equation (21) for
can be expressed in analogy to Equation (21) for
 , with the notable difference that
, with the notable difference that  for
for .
.
Note that there is no need to form ; v and w can be obtained as the eigenvectors associated to a largest eigenvalue of A. However, attention needs to
; v and w can be obtained as the eigenvectors associated to a largest eigenvalue of A. However, attention needs to
be paid to the scaling. Since the largest eigenvalue of A is , w and v have
, w and v have
to be scaled accordingly.
A possible choice for  is obtained by solving the following simple linear equation, resulting from the first order expansion of the eigenvalue at
is obtained by solving the following simple linear equation, resulting from the first order expansion of the eigenvalue at :
:
This gives
 (30)
(30)
This can be improved in a simple way by computing this expression for  for several eigenvalues of A (say, the m largest ones) and taking the smallest computed
for several eigenvalues of A (say, the m largest ones) and taking the smallest computed . For a sparse matrix A, the matlab function eigs (an interface for ARPACK, which implements the implicitly restarted Arnoldi Method [18] [19] allows to efficiently compute a predefined number m of Ritz values.
. For a sparse matrix A, the matlab function eigs (an interface for ARPACK, which implements the implicitly restarted Arnoldi Method [18] [19] allows to efficiently compute a predefined number m of Ritz values.
Another possible, very natural choice for  is given by
is given by
 (31)
(31)
where  is the upper bound for the SSV computed by the matlab function mussv.
is the upper bound for the SSV computed by the matlab function mussv.
4. Fast Approximation of  [13]
[13]
This section discuss the outer algorithm for computing a lower bound of . Since the principles are the same, one can treat the case of purely complex perturbations in detail and provide a briefer discussion on the extension to the case of mixed complex/real perturbations.
. Since the principles are the same, one can treat the case of purely complex perturbations in detail and provide a briefer discussion on the extension to the case of mixed complex/real perturbations.
Purely Complex Perturbations
In the following let  denote a continuous branch of (local) maximizers for
denote a continuous branch of (local) maximizers for

computed by determining the stationary points  of the system of ODEs in Equation (30). The computation of the SSV is equivalent to the smallest solution
of the system of ODEs in Equation (30). The computation of the SSV is equivalent to the smallest solution  of the equation
of the equation . In order to approximate this solution, aim at computing
. In order to approximate this solution, aim at computing  such that the boundary of the
such that the boundary of the  -spectral value set is locally
-spectral value set is locally
contained in the unit disk and its boundary  is tangential to the unit
is tangential to the unit
circle. This provides a lower bound  for
for .
.
Now make the following generic assumption.
Assumption 4.1. [13] . For a local extremizer  of
of , with corresponding largest eigenvalue
, with corresponding largest eigenvalue , assume that
, assume that  is simple and that
is simple and that  and
and  are smooth in a neighborhood of
are smooth in a neighborhood of .
.
The following theorem gives an explicit and easily computable expression for the derivative of .
.
Theorem 4.1. [13] . Suppose that Assumption 4.1 holds for  and
and . Let
. Let  and
and  be the corresponding right and left eigen- vectors of
be the corresponding right and left eigen- vectors of , scaled according to Equation (22). Consider the partitioning of
, scaled according to Equation (22). Consider the partitioning of ,
,  , and suppose that Assumptions (12) and (13) hold. Then
, and suppose that Assumptions (12) and (13) hold. Then
 (32)
(32)
5. Numerical Experimentation
This section provides the comparison of the lower bounds of SSV computed by well-known Matlab function mussv and the algorithm [13] .
We consider the following delay eigenvalue problem of the form:

where,
and .
.
Example 1. Consider the following two dimensional matrix  taken from above mentioned delay eigenvalue problem.
taken from above mentioned delay eigenvalue problem.
along with the perturbation set

Apply the Matlab routine mussv, one can obtain the perturbation  with
with
and  For this example, one can obtain the upper bound
For this example, one can obtain the upper bound  while the same lower bound as
while the same lower bound as .
.
By using the algorithm [13] , one can obtain the perturbation  with
with

and  while
while . The same lower bound can be obtained
. The same lower bound can be obtained as the one obtained by mussv.
as the one obtained by mussv.
In the following Table 1, it is presented the comparison of the bounds of SSV computed by MUSSV and the algorithm [13] for the matrix  given bellow. In the very first column, it is presented the dimension of the matrix
given bellow. In the very first column, it is presented the dimension of the matrix . In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds
. In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds ,
,  computed by MUSSV and the lower bound
computed by MUSSV and the lower bound  computed by algorithm [13] respectively.
computed by algorithm [13] respectively.
and
Example 2. Consider the following two dimensional matrix  taken from above mentioned delay eigenvalue problem.
taken from above mentioned delay eigenvalue problem.
along with the perturbation set

Apply the Matlab routine mussv, one can obtain the perturbation  with
with

Table 1. Comparison of lower bounds of SSV with MATLAB function mussv.
and  For this example, one can obtain the upper bound
For this example, one can obtain the upper bound while the same lower bound as
while the same lower bound as .
.
By using the algorithm [13] , one can obtain the perturbation  with
with

and  while
while  The same lower bound can be obtained
The same lower bound can be obtained as the one obtained by mussv.
as the one obtained by mussv.
In Table 2, it is presented the comparison of the bounds of SSV computed by MUSSV and the algorithm [13] for the matrix  given bellow. In the very first column, it is presented the dimension of the matrix
given bellow. In the very first column, it is presented the dimension of the matrix . In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds
. In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds ,
,  computed by MUSSV and the lower bound
computed by MUSSV and the lower bound  computed by algorithm [13] respectively.
computed by algorithm [13] respectively.
and
We consider the polynomial eigenvalue problems.
Consider the quadratic eigenvalue problem of the form:
Example 3. Consider the following three dimensional matrix  taken from above mentioned delay eigenvalue problem.
taken from above mentioned delay eigenvalue problem.
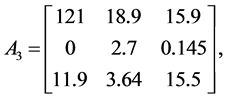
along with the perturbation set

Apply the Matlab routine mussv, one can obtain the perturbation  with
with
Table 2. Comparison of lower bounds of SSV with MATLAB function mussv.
and  For this example, one can obtain the upper bound
For this example, one can obtain the upper bound  while the same lower bound as
while the same lower bound as 
By using the algorithm [13] , one can obtain the perturbation  with
with

and  while
while  The same lower bound can be obtained
The same lower bound can be obtained  as the one obtained by mussv.
as the one obtained by mussv.
In Table 3, it is presented the comparison of the bounds of SSV computed by MUSSV and the algorithm [13] for the matrix  given bellow. In the very first column, it is presented the dimension of the matrix
given bellow. In the very first column, it is presented the dimension of the matrix . In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds
. In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds ,
,  computed by MUSSV and the lower bound
computed by MUSSV and the lower bound  computed by algorithm [13] respectively.
computed by algorithm [13] respectively.
and
Example 4. Consider the following three dimensional matrix  taken from above mentioned delay eigenvalue problem.
taken from above mentioned delay eigenvalue problem.
Table 3. Comparison of lower bounds of SSV with MATLAB function mussv.
along with the perturbation set

Apply the Matlab routine mussv, one can obtain the perturbation  with
with
and  For this example, one can obtain the upper bound
For this example, one can obtain the upper bound while the same lower bound as
while the same lower bound as 
By using the algorithm [13] , one can obtain the perturbation  with
with

and  while
while  The same lower bound can be obtained
The same lower bound can be obtained  as the one obtained by mussv.
as the one obtained by mussv.
In Table 4, it is presented the comparison of the bounds of SSV computed by MUSSV and the algorithm [13] for the matrix  given bellow. In the very first column, it is presented the dimension of the matrix
given bellow. In the very first column, it is presented the dimension of the matrix . In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds
. In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds ,
,  computed by MUSSV and the lower bound
computed by MUSSV and the lower bound  computed by algorithm [13] respectively.
computed by algorithm [13] respectively.
and
Example 5. Consider the following three dimensional matrix  taken from above mentioned delay eigenvalue problem.
taken from above mentioned delay eigenvalue problem.
Table 4. Comparison of lower bounds of SSV with MATLAB function mussv.
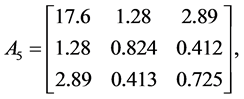
along with the perturbation set

Apply the Matlab routine mussv, one can obtain the perturbation  with
with
and  For this example, one can obtain the upper bound
For this example, one can obtain the upper bound  while the same lower bound as
while the same lower bound as .
.
By using the algorithm [13] , one can obtain the perturbation  with
with

and  while
while  The same lower bound can be obtained
The same lower bound can be obtained  as the one obtained by mussv.
as the one obtained by mussv.
In Table 5, it is presented the comparison of the bounds of SSV computed by MUSSV and the algorithm [13] for the matrix  given bellow. In the very first column, it is presented the dimension of the matrix
given bellow. In the very first column, it is presented the dimension of the matrix . In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds
. In the second column, it is presented the set of block diagonal matrices denoted by BLK. In the third, fourth and fifth columns, it is presented the upper and lower bounds ,
,  computed by MUSSV and the lower bound
computed by MUSSV and the lower bound  computed by algorithm [13] respectively.
computed by algorithm [13] respectively.
and
Table 5. Comparison of lower bounds of SSV with MATLAB function mussv.
6. Conclusion
In this article the problem of approximating structured singular values for the delay eigenvalue and polynomial eigenvalue problems is considered. The obtained results provide a characterization of extremizers and gradient systems, which can be integrated numerically in order to provide approximations from below to the structured singular value of a matrix subject to general pure complex and mixed real and complex block perturbations. The experimental results show the comparison of the lower bounds of structured singular values with once computed by MUSSV and alogorithm [13] .
Cite this paper
Rehman, M.-U., Majeed, D., Nasreen, N. and Tabassum, S. (2017) Computing Structured Singular Values for Delay and Polynomial Eigenvalue Problems. Open Journal of Applied Sciences, 7, 348-364. https://doi.org/10.4236/ojapps.2017.77028
References
- 1. Packard, A. and Doyle, J. (1993) The Complex Structured Singular Value. Automatica, 29, 71-109.
https://doi.org/10.1016/0005-1098(93)90175-S - 2. Bernhardsson, B. and Rantzer, A. and Qiu, L. (1994) Real Perturbation Values and Real Quadratic Forms in a Complex Vector Space. Linear Algebra and Its Applications, 1, 131-154.
- 3. Chen, J., Fan, M.K.H. and Nett, C.N. (1996) Structured Singular Values with Nondiagonal Structures. I. Characterizations. IEEE Transactions on Automatic Control, 41, 1507-1511.
- 4. Hinrichsen, D. and Pritchard, A.J. (2005) Mathematical Systems Theory I, Vol. 48 of Texts in Applied Mathematics. Springer-Verlag, Berlin.
- 5. Karow, M., Kokiopoulou, E. and Kressner, D. (2010) On the Computation of Structured Singular Values and Pseudospectra. Systems & Control Letters, 59, 122-129.
https://doi.org/10.1016/j.sysconle.2009.12.007 - 6. Karow, M., Kressner, D. and Tisseur, F. (2006) Structured Eigenvalue Condition Numbers. SIAM Journal on Matrix Analysis and Applications, 28, 1052-1068.
https://doi.org/10.1137/050628519 - 7. Qiu, L., Bernhardsson, B., Rantzer, A., Davison, E.J., Young, P.M. and Doyle, J.C. (1995) A Formula for Computation of the Real Stability Radius. Automatica, 31, 879-890.
- 8. Braatz, R.P., Young, P.M., Doyle, J.C. and Morari, M. (1994) Computational Complexity of µ Calculation. IEEE Transactions on Automatic Control, 39, 1000-1002.
- 9. Fan, M.K.H., Tits, A.L. and Doyle, J.C. (1991) Robustness in the Presence of Mixed Parametric Uncertainty and Unmodeled Dynamics. IEEE Transactions on Automatic Control, 36, 25-38.
- 10. Young, P.M., Newlin, M.P. and Doyle, J.C. (1992) Practical Computation of the Mixed µ Problem. American Control Conference, 24-26 June 1992, 2190- 2194.
- 11. Packard, A., Fan, M.K.H. and Doyle, J. (1998) A Power Method for the Structured Singular Value. Proceedings of the 27th IEEE Conference on Decision and Control, 7-9 December 1988, 2132-2137.
- 12. Young, P.M., Doyle, J.C., Packard, A., et al. (1994) Theoretical and Computational Aspects of the Structured Singular Value. Systems, Control and Information, 38, 129-138.
- 13. Guglielmi, N., Rehman, M.-U. and Kressner, D. (2016) A Novel Iterative Method to Approximate Structured Singular Values. arXiv preprint arXiv:1605.04103.
- 14. Zhou, K., Doyle, J. and Glover, K. (1996) Robust and Optimal Control. Prentice Hall, New Jersey, Volume 40.
- 15. Kato, T. (2013) Perturbation Theory for Linear Operators. Springer Science & Business Media, Volume 132.
- 16. Guglielmi, N. and Lubich, C. (2011) Differential Equations for Roaming Pseudospectra: Paths to Extremal Points and Boundary Tracking. SIAM Journal on Numerical Analysis, 49, 1194-1209.
https://doi.org/10.1137/100817851 - 17. Guglielmi, N, and Lubich, C. (2013) Low-Rank Dynamics for Computing Extremal Points of Real Pseudospectra. SIAM Journal on Matrix Analysis and Applications, 34, 40-66.
https://doi.org/10.1137/120862399 - 18. Lehoucq, R.B. and Sorensen, D.C. (1996) Deflation Techniques for an Implicitly Restarted Arnoldi Iteration. SIAM Journal on Matrix Analysis and Applications, 17, 789-821.
https://doi.org/10.1137/S0895479895281484 - 19. Lehoucq, R.B., Sorensen, D.C. and Yang, C. (1998) ARPACK Users’ Guide: Solution of Large-Scale Eigenvalue Problems with Implicitly Restarted Arnoldi Methods. SIAM, Volume 6.