 American Journal of Operations Research, 2013, 3, 307-327 http://dx.doi.org/10.4236/ajor.2013.32028 Published Online March 2013 (http://www.scirp.org/journal/ajor) Copyright © 2013 SciRes. AJOR Comparison of Different Confidence Intervals of Intensities for an Open Queueing Network with Feedback Vinayak Kawaduji Gedam1, Suresh Bajirao Pathare2 1Department of Statisti cs, University of Pune, Pune, India 2Indira College of Commerce and Science, Pune, India Email: vkgedam@stats.unipune.ac.in, sureshpathare_1975@yahoo.com Received March 14, 2012; revised April 30, 2012; accepted May 10, 2012 ABSTRACT In this paper we propose a consistent and asymptotically no rmal estimator (CAN) of intensities 1 , 2 for a queueing network with feedback (in which a job may return to previously visited nodes) with distribution-free inter-arrival and service times. Using this estimator and its estimated variance, some 100 1% asymptotic confidence intervals of intensities are constructed. Also bootstrap approaches such as Standard bootstrap, Bayesian bootstrap, Percentile boot- strap and Bias-corrected and accelerated bootstrap are also applied to develop the confidence intervals of intensities. A comparative analysis is conducted to demonstrate perfo rmances of the confidence intervals of intensities for a queu eing network with short run data. Keywords: Coverage Percentage; Relative Coverage; Bayesian Bootstrap; Bias-Corrected and Accelerated Bootstrap; Percentile Bootstrap; Standard Bootstrap 1. Introduction Consider a queueing network of a computer system with feedback (in which a job may return to previously visited nodes) as shown in Figure 1. This queueing network con- sists of a CPU node and an Input/Output (I/O) node. Ex- ternal jobs arrive at the CPU node according to the rate . After service completion at CPU node, the job pro- ceeds to the I/O node with probability p1, and with prob- ability p0 the job depart s f rom the system, where 01 1pp . Jobs lea ving the I/ O node are always fe d back to the CPU node (see Figure 1). The service tim es at each node are with rates 1 and 2 respectively. The suc- cessive service times at both nodes are assumed to be mutually independent and independent of the state of the system. The traffic intensity at the CPU node and I/O node is given by 1 12 01 02 ,p pp (1) respectively. Intensity 1 and 2 can be interpreted as expected number of arrivals per mean service time. The condition for stability of the system is both 1 , 2 are less unity. Basic properties of queueing networks are introduced in Disney [1]. Burke [2], Beautler and Melamed [3] showed that the input process to a service center in a network with feedback is not Poisson in general. It is for this reason that Jacksons result is remarkable. Jacksons [4] theorem states that each node behaves like an inde- pendent queue. The product form solution to open network of Mark- ovian queues with feedback is also discussed in Jackson [4]. Simon and Foley [5], Melamed [6] pointed out that computation of response time distribution is difficult even for Jacksonian networks without feedback. Disney and Kiessel [7] discussed traffic process in queueing networks thorough Markov renewal approach. Thiruvai- yaru, Basawa and Bhat [8] established Maximum likeli- hood estimators of the parameters of an open Jackson network a re derived, and t hei r j oi nt asy mptotic no rmality. The probl em of estim ation fo r ta ndem q ueue s is disc ussed as a special case of the Jackson system. These results are valid when the system is not necessarily in equilibrium. Thiruvaiyaru and Basawa [9] considered the problem of estimation for the parameters in a Jackson’s type queue- ing network with the arrival at each node following re- newal process and service time distribution being arbi- trary. Open queu eing networks are usefu l in studying the behavior of computer communication networks (Klein- rock [10]). More approach to queueing network analysis  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 308 Figure 1. An open queueing ne twork with feedback. developed by Buzen and Denning [11]. Efron [12-14] the greatest statistician in the field of nonparametric resam- pling approach, originally developed and proposed the bootstrap, which is a resampling technique that can be effectively applied to estimate the sampling distribution of any statistic. Sp ecifically, one can utilize the bootstrap method to approximate the sampling distribution of a statistic defined by a random sample from a population with unknown probability distribution. And due to the popularity of PC and statistical software, today the boot- strap becomes the most powerful nonparametric estima- tion procedure. Based upon the bootstrap resampling technique, most statisticians utilize the standard bootstrap (SB), percentile bootstrap (PB), and bias-corrected and accelerated bootstrap (BCaB) approaches to produce confidence intervals for practical problems. Besides the standard bootstrap (SB) technique, Rubin [15] presented the Bayesian bootstrap (BB) technique of resampling. Miller [16] showed that the SB can be re- garded as an extension of the jackknife. The BB is a natural Bayesian analogue of the SB. The BB simulates the posterior distribution of parameters under particular model specifications, whereas the SB simulates the esti- mated sampling distribution of a statistic estimating the parameters. Both SB and BB can be applied to construct confidence intervals of intensity for a queueing system with distribution-free inter-arrival and service times. Chu and Ke [17] constructed new confidence intervals of mean response time for an M/G/1 FCFS queueing system. Also, they performed the accuracy of bootstrap confidence intervals through calculating the coverage probability and the average length of confidence intervals. Chu and Ke [18] proposed a consistent and asymptoti- cally normal (CAN) estimator of the mean response time for a G/M/1 queueing system, which is based on the fixed point of empirical Laplace function. Ke and Chu [19] proposed a consistent and asymptotically normal estimator of intensity for a queueing system with distri- bution-free interarrival and service times. Also, they computed confidence intervals, testing statistical hy- pothesi s of int ensi ty and powe r funct ion as soci ated wit h it in this paper. Ke and Chu [20] constructed new confi- dence intervals of intensity for a queueing system, which are based on different bootstrap methods. They also per- formed the accuracy of these bootstrap confidence inter- vals through calcu lating the coverage probability and the expected length of confidence intervals. They first pro- posed bootstrapping technique and concept of relative coverage to queueing system. They studied five estima- tion approaches of intensity for a queueing system with distribution free inter-arrival and service times for short run. They have introduced a new measure called relative coverage to assess the efficient performances of confi- dence intervals. In this paper we propose non parametric interval esti- mation approach to intensities 1 , 2 for a open queue- ing network with feedback. In Section 2 we prove that the natural estimators 1 ˆ , 2 ˆ of intensities 1 and 2 are strongly consistent and asymptotically normal (CAN). Based on the asymptotical normality of 1 ˆ , 2 ˆ , we can construct a CAN confidence interval of 1 and 2 . Next in Section 3 we establish the SB confidence interval of 1 , 2 via the standard bootstrap approach. In Section 4 we developed the derivation of the BB confidence inter- val of 1 , 2 in terms of the Bayesian bootstrap ap- proach. The percentile bootstrap (PB) confidence inter- vals of 1 , 2 are developed in Section 5. In Section 6 we developed the bias-corrected and accelerated boot- strap (BCaB) confidence intervals. A numerical simula- tion study is conducted in Section 7 to demonstrate per- formances of the interval estimation approaches for an open queueing network with feedback using short run data. All simulation results are shown by appropriate tables for illustrating performances of the five interval estimation approaches. Finally, we make some conclu- sions in Section 8. 2. Nonparametric Statistical Inference of Intensities Let X1 and Y1 be nonnegative random variables repre- sents the inter-arrival and service time at CPU node. Similarly X2 and Y2 be nonnegative random variables represents the inter-arrival and service time at I/O node respectively. Given that a job just completed CPU node burst, it will next request I/O node service with probability 1 p and with probability 0 p, where 01 1pp departs from the system. The random variables at CPU node and I/O node are independent. The intensities are defined as follows: 1 1 0 1 Y X p and 2 2 0 21 Y X p p , (2) where 1 X , 2 X denote the mean inter-arrival times at CPU node and I/O node respectively. Similarly 1 Y , 2 Y denote the mean service times at CPU node and I/O node respectively. Equation (2) is equivalent to Equation (1). 2.1. Estimating Intensities Assume that 11 121 ,,, n XX is a random sample drawn  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 309 from X1 and 011 01201 ,,, n pY pYpY is a random sample drawn from Y1. Let 101 , ii pY represents inter-arrival time and service time for the ith customer of CPU node. Similarly assume 121 12212 ,,, m pX pXpX is a random sample drawn from X2 and 021 02202 ,,, m pY pYpY is a random sample drawn from Y2. Let 12 02 , ii pXpY represents inter-arrival time and service time for the ith customer of I/O node. Let 1212 ,,, XYY be the sample means of X1, X2, Y1, Y2 respectively. 112 12 11 1012 02 11 11 , 11 , nm ii ii nm ii ii XX pX nm YpYYpY nm According to the Strong Law of Large Numbers, we know that 1212 ,,, XYY are strongly consistent estima- tor of 1212 ,,, XXYY respectively. Thus a strongly consistent estimator of intensities are given by 12 12 12 ˆˆ , YY X (3) In practical queueing network, the true distributions of X1, X2, Y1, Y2 are rarely known, so the exact distributions of 12 ˆˆ , cannot be derived. But under the assumption that X1 and Y1, X2 and Y2 being independent, the asymp- totic distributions of 12 ˆˆ , can be developed by the following procedures. Firstly, according to the Central Limit Theorem (see [21] p. 234), w e have 11 11 2 1 2 10 0, and 0, D XX D YY nX N nY pN (4) where 1 2 X and 1 2 Y are variances of X1 and Y1, respec- tively. Also, 22 22 2 21 2 20 0, and 0, , D XX D YY mX pN mY pN (5) where 2 2 X and 2 2 Y are variances of X2 and Y2, re- spectively, and D denotes convergence in distribu- tion. Next note that 1 1 1111 1 11 0 1 1 100 1 1 ˆ . Y X XYYX X n p Y nX nYp pX X Also, 2 2 222 2 2 22 0 2 21 120021 12 ˆ . Y X XYY X X m p Y mXp mpY ppXp pX (6) Therefore by the Slutsky’s theorem [see [21] p. 227], we get 2 11 1 ˆ0, D nN , where 111 1 1 22 222 0 2 14 XY YX X p . And 2 22 2 ˆ0, D mN (7) where 222 2 2 22222 2 10 2 224 1 XY YX X pp p . Now, set 11 22 22 222 101 2 14 1 222222 12 02 2 224 12 ˆand ˆ, YX YX XS pYS X pXS pYS pX (8) where 11 22 22 22 11 011 11 22 22 122022 11 11 , 11 and . nn XiY i ii mm XiYi ii SXXSpYY nn SpXXSpYY mm Then 22 12 ˆˆ , are strongly consistent estimators of 22 12 , respectively. Applying the Slutsky’s theorem once again, we deduce that 11 1 22 2 ˆ0,1 and ˆ ˆ0,1 ˆ D D nN mN (9) Thus 12 ˆˆ , are strongly consistent and asymptoti- cally normal (CAN) estimators with approximate vari- ances 22 12 ˆˆ , nm respectively. 2.2. Confidence Intervals Using the CAN estimators 12 ˆˆ , and its associated approximate variances 22 12 ˆˆ , nm we construct a confi-  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 310 dence intervals of intensities 12 & for a open queue- ing network with feedback. Let z be the upper th quantile of the standard normal distribution, by the as- ymptotic distribution of 112 2 12 ˆˆ & ˆˆ nm in expression (9), an approximate 100 1% confi- dence interval of 12 & are obtained as 11 22 1 21 21 111 ˆ 1ˆ ˆˆ ˆˆ n Pz z zz Pnn Consequently, an approximate 100 1% confi- dence interval of 1 is 21 21 11 ˆˆ ˆˆ , zz nn . (10) Similarly, an approximate 100 1% confidence interval of 2 is 22 22 22 ˆˆ ˆˆ , zz mm . (11) 3. Standard Bootstrap Confidence Intervals of Intensities Now the bootstrap confidence intervals are developed as follows: Let 11 121 ,,, n xx be a random sample of n observa- tions taken from the population X1 and 011 012 ,,,pypy 01n py be a random sample of n observations taken from the population Y1. According to the bootstrap procedure, a simple random sample 11 121 ,,, n xx can be taken from the empirical distribution function of 11 121 ,,, n xx called a bootstrap sample from 11121 ,,, n xx. Also, we can draw a bootstrap sample 01101201 ,,, n py pypy from 01101201 ,,, n py pypy. It follows from Equation (2) that an estimate of intensity 1 can be calculated from boot- strap samples as 1 11 ˆy , (12) where 1 and 1 are the sample means of 11 12 ,,,xx 1n and011 01201 ,,, n py pypy respectively and 1 ˆ is called a bootstrap estimate of 1 . The above resampling process can be repeated N1 times. The N1 bootstrap esti- mates 1 11 121 ˆˆˆ ,,, can be computed from the boot- strap resamples. Averaging the N1 bootstrap estimates we obtain that 1 11 1 1 1 ˆˆ N i i N (13) is the bootstrap estimate of 1 . And the standard devia- tion of 1 ˆ can be estimated by 1 11 12 2 1 1 1 1 ˆˆˆ . 1 N NiN i sd N (14) Because the central limit theorem implies that the dis- tribution of 1 ˆ is approximately nor mal. A 100 1% SB confidence interval for 1 is 11 12 12 ˆˆ ˆˆ ,, NN zsd zsd (15) Similarly 121 12212 ,,, m px pxpx is a random sample of m observation drawn from population X2 and 021 ,py 022 02 ,, m py py is a sample of m observations taken from the population 2 Y. According to the bootstrap pro- cedure, a simple random sample 121 12212 ,,, m px pxpx can be taken from the empirical distribution function of 121 12212 ,,, m px pxpx called a bootstrap sample from 121 12212 ,,, m px pxpx. Also, we can draw a bootstrap sample 021 02202 ,,, m py pypy from 021 022 ,,,pypy 02m py . An estimate of intensity 2 can be calculated from bootstrap samples as 2 2 2 ˆy , (16) where 2 and 2 are the sample means of 121 ,px 122 12 ,, m px px and 021 02202 ,,, m py pypy respec- tively and 2 ˆ is called a bootstrap estimate of 2 . The above resampling process can be repeated M1 times. The M1 bootstrap estimates 1 21 222 ˆˆˆ ,,, can be com- puted from the bootstrap resamples. Averaging the M1 bootstrap estimates we obtain that 1 12 1 1 1 ˆˆ M i i M (17) is the bootstrap estimate of 2 . And the standard devia- tion of 2 ˆ can be estimated by 11 12 2 2 1 1 1 ˆˆˆ . 1 M MiM i sd M (18) Because the central limit theorem implies that the dis- tribution of 2 ˆ is approximately normal. A 100 1% SB confidence interval for 2 is 11 22 22 ˆˆˆˆ ,, MM zsd zsd (19) 4. Bayesian Bootstrap Confidence Intervals of Intensities The Bayesian bootstrap is analogous to the standard bootstrap. Each BB replication generates a posterior probability for each 1i . Specifically, one BB replicatio n is generated by drawing 1n uniform 0,1 random numbers 12 1 ,, , n rr r , ordering them, and calculating the gaps 11 iii wrr , 1, 2,,in , where 00r and  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 311 1 n r. Then 111121 ,,, in www w is the vector of probabilities attached to the inter-arrival data values 11 121 ,,, n xx in that BB replicatio n . Considering all BB replications gives the BB distribution of the distribution of X1 and thus of any parameter of this distribution. Hence fo r 1 X (the mean of X1), in each BB replication we calculate 1 X as if 1i w were the probability that 1i x that is, we calculate 111 1 n ii i wx . The dis- tribution of the values of 1 overall BB replications is the BB distribution of 1 X . Also, generating a vector of probabilities 11112 1 ,,, n vvv v attached to the service time data values 011 01201 ,,, n py pypy in a BB replication, and we calculate 1011 1 n ii i ypvy for 1 Y (the mean of Y1). Then in terms of equation (2) an estimate of intensity 1 can be calculated from BB replications as 1 11 ˆy , (20) where 1 ˆ is called a Bayesian bootstrap estimate of 1 . The above BB process can be repeated N1 times. The N1 BB estimates, 1 11 121 ˆˆˆ ,,, can be computed from the BB replications. Averag ing the N1 BB estimates, we obtain that 1 1 1 1 1 ˆˆ N Bj j N , (21) is the BB estimate of 1 . And the standard deviation of 1 ˆ can be estimated by 1 1 2 2 1BB 1 1 1 ˆˆˆ 1 N BB j j sd N . (22) Applying the asymptotical normality of 1 ˆ , a 100 1% BB confidence interval for 1 is 12 12 ˆˆˆˆ , BB BB zsd zsd . (23) Similarly each BB replication generates a posterior probability for each 2i . Specifically, one BB replica- tion is generated by drawing 1m uniform 0,1 ran- dom numbers 121 ,, , m rr r , ordering them and calculat- ing the gaps 21,1,2,, iii wrrim , where 00r and 1 m r. Then 221222 ,,, im www w is the vec- tor of probabilities attached to the inter-arrival data val- ues 121 12212 ,,, m px pxpx in that BB replication. Con- sidering all BB replications gives the BB distribution of the distribution of X2 and thus of any parameter of this distribution. Hence for 2 X (the mean of X2), in each BB replication we calculate 2 X as if 2i w were the probability that 22i x that is, we calculate 2122 1 m ii i pwx . The distribution of the values of 2 over all BB replications is the BB distribution of 2 X . Also, generating a vector of probabilities 22122 2 ,,, m vvv v attached to the service time data values 021 02202 ,,, m py pypy in a BB replication, and we calculate 2022 1 m ii i pvy for 2 Y (the mean of Y2). Then in terms of Equation (2) an estimate of intensity 2 can be calculated from BB replications as 2 22 ˆy , (24) where 2 ˆ is called a Bayesian bootstrap estimate of 2 . The above BB process can be repeated M1 times. The M1 BB estimates, 1 21 222 ˆˆˆ ,,, can be com- puted from the BB replications. Averaging the M1 BB estimates, we obtain that 1 2 1 1 1 ˆˆ M Bj j M , (25) is the BB estimate of 2 . And the standard deviation of 2 ˆ can be estimated by 12 2 1 1 1 ˆˆ ˆ 1 M BBj BB j sd M . (26) Applying the asymptotical normality of 2 ˆ , a 100 1% BB confidence interval for 2 is 22 22 ˆˆˆ ˆ , BB BB zsd zsd (27) 5. Percentile Bootstrap Confidence Intervals of Intensities Let 1 11 121 ˆˆˆ ,,, and 1 21 222 ˆˆˆ ,,, call the boot- strap distribution of 12 ˆˆ , respectively. Let 1 ˆ1 , 111 ˆˆ 2, ,N and 22 21 ˆˆˆ 1,2, , be order statistics of 1 11 121 ˆˆ ˆ ,,, N and 1 21 222 ˆˆˆ ,,, respectively. Then utilizing the 1002 th and 100 12th percentage points of the bootstrap dis- tribution, a 100 1% PB confidence interval for 1 , 2 are obtained as 11 11 ˆˆ ,1, 22 NN (28) 21 21 ˆˆ ,1, 22 MM (29) where [x] denotes the greatest integer less than or equal to x. 6. Bias-Corrected and Accelerated Boo tstr ap Confidence Intervals of Intensities The bootstrap distribution 1 11 121 ˆˆ ˆ ,,, and 21 ˆ,  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 312 1 22 2 ˆˆ ,, may be biased. This method is designed to correct this potential bias of the bootstrap designed. Set 111 11 ˆˆ Nj j I pN and 122 11 ˆˆ Mj j I pM , where is the indicator function. Define 1 0 ˆ zp and 1 1 ˆ zp , where 1 denotes the inverse func- tion of the standard normal distribution . Except for correcting the potential bias of the bootstrap distribution, we can accelerate convergence of bootstrap distribution. Let 1 i and 01 pY i denote the original samples with the ith observation x1i and 01i py deleted, also let 1 ˆi b e the estimator of 1 calculated by using 1 i and 01 pY i Define 11 1 1ˆ n i i n , Similarly 12 pXi , 02 pY i denote the original samples with the ith obser- vation 12i px and 02i py deleted, also 2 ˆi be the esti- mator of 2 calculated by using 12 pX i and 02 pY i . Define 22 1 1ˆ m i i m And 3 2 3 2 3 11 1 1 2 11 1 3 22 1 2 2 22 1 ˆ ˆ, ˆ 6 ˆ ˆ ˆ 6 n i i n i i m i i m i i a a (30) where 011 ˆ ˆˆ ,,zza , and 2 ˆ a are named bias-correction and acceleration respectively. Thus a 100 1% Bias-corrected and accelerated bootstrap (BCaB) Confidence Interval of intensities 1 , 2 are constructed by 111112 ˆˆ ,NN (31) 213 214 ˆˆ ,MM (32) where 02 10 102 ˆ ˆˆˆ 1 zz zaz z 02 20 102 ˆ ˆˆˆ 1 zz zaz z 12 31 21 2 ˆ ˆˆˆ 1 zz zaz z 12 41 21 2 ˆ ˆˆˆ 1 zz zazz 7. Simulation Study To evaluate performances of the different interval esti- mation approaches mentioned above for an open queue- ing network with feedback using short run data, a nu- merical simulation study was undertaken. Most of the statisticians assess performances of interval estimations in terms of coverage percentages or average lengths of confidence intervals. However, through simulation study in the research work, we find that larger coverage per- centages of confidence interval may often be due to wider standard deviation of interval estimation methods. Moreover, narrower confidence intervals may often lead to smaller coverage percentages. Hence, both coverage percentage and average length are not efficient for ap- praising interval estimation methods. In order to over- come above two shortcomings, we propose a measure called relative coverage to evaluate performances of in- terval estimation methods where, Coveragepercentage Relative coverageAv eragelength . The larger of the relative coverage implies the better performance of the corresponding con fidence interval. In order to reach this goal, we set a continuous distribution with mean 1 on inter-arrival time X1 and X2. Also set continuous distribution with mean 1 1 on the service time Y1 at CPU node and continuous distribution with mean 2 1 on the service time Y2 at I/O node. The lev- els of p0 considered in the simulation study are 0.1 to 0.9 where as levels of p1 are 0.9 to 0.1, where p0 is the prob- ability that the job departs from the system and p1 is the probability that after service completion at CPU node, the job proceeds to the I/O node. This means with probability 00.1p the job departs from the system and with probability 10.9p , after service completion at CPU node, the job proceeds to the I/O node and so on. Also we have considered the values of 1 and 2 such that 11 and 21 for simulation study. Note that in Table 1 wherever 11 and 21 such values of 1 and 2 are not considered for simulation study. The intensity parameters 1 and 2 are calculated using Equation (1). The different values of , 1 , 2 , p0 and p1 are considered for simulation study as shown in Table 1. For different levels of 1 , random samples of inter- arrival times 11 121 ,,, n XX and service times 011 pY , 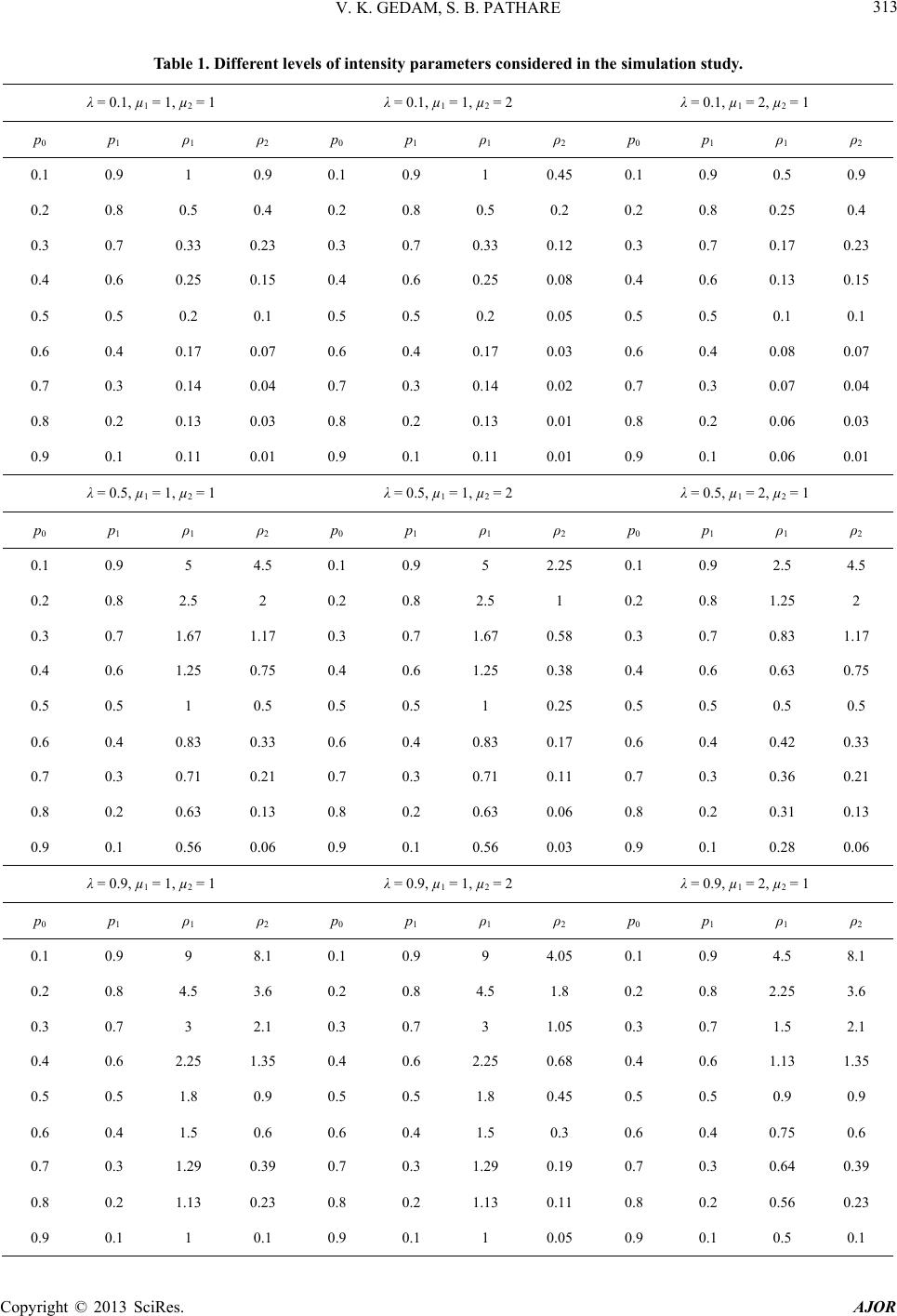 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 313 Table 1. Different levels of intensity parameters considered in the simulation study. λ = 0.1, µ1 = 1, µ2 = 1 λ = 0.1, µ1 = 1, µ2 = 2 λ = 0.1, µ1 = 2, µ2 = 1 p0 p1 ρ1 ρ2 p0 p1 ρ1 ρ2 p0 p1 ρ1 ρ2 0.1 0.9 1 0.9 0.1 0.9 1 0.45 0.1 0.9 0.5 0.9 0.2 0.8 0.5 0.4 0.2 0.8 0.5 0.2 0.2 0.8 0.25 0.4 0.3 0.7 0.33 0.23 0.3 0.7 0.33 0.12 0.3 0.7 0.17 0.23 0.4 0.6 0.25 0.15 0.4 0.6 0.25 0.08 0.4 0.6 0.13 0.15 0.5 0.5 0.2 0.1 0.5 0.5 0.2 0.05 0.5 0.5 0.1 0.1 0.6 0.4 0.17 0.07 0.6 0.4 0.17 0.03 0.6 0.4 0.08 0.07 0.7 0.3 0.14 0.04 0.7 0.3 0.14 0.02 0.7 0.3 0.07 0.04 0.8 0.2 0.13 0.03 0.8 0.2 0.13 0.01 0.8 0.2 0.06 0.03 0.9 0.1 0.11 0.01 0.9 0.1 0.11 0.01 0.9 0.1 0.06 0.01 λ = 0.5, µ1 = 1, µ2 = 1 λ = 0.5, µ1 = 1, µ2 = 2 λ = 0.5, µ1 = 2, µ2 = 1 p0 p1 ρ1 ρ2 p0 p1 ρ1 ρ2 p0 p1 ρ1 ρ2 0.1 0.9 5 4.5 0.1 0.9 5 2.25 0.1 0.9 2.5 4.5 0.2 0.8 2.5 2 0.2 0.8 2.5 1 0.2 0.8 1.25 2 0.3 0.7 1.67 1.17 0.3 0.7 1.67 0.58 0.3 0.7 0.83 1.17 0.4 0.6 1.25 0.75 0.4 0.6 1.25 0.38 0.4 0.6 0.63 0.75 0.5 0.5 1 0.5 0.5 0.5 1 0.25 0.5 0.5 0.5 0.5 0.6 0.4 0.83 0.33 0.6 0.4 0.83 0.17 0.6 0.4 0.42 0.33 0.7 0.3 0.71 0.21 0.7 0.3 0.71 0.11 0.7 0.3 0.36 0.21 0.8 0.2 0.63 0.13 0.8 0.2 0.63 0.06 0.8 0.2 0.31 0.13 0.9 0.1 0.56 0.06 0.9 0.1 0.56 0.03 0.9 0.1 0.28 0.06 λ = 0.9, µ1 = 1, µ2 = 1 λ = 0.9, µ1 = 1, µ2 = 2 λ = 0.9, µ1 = 2, µ2 = 1 p0 p1 ρ1 ρ2 p0 p1 ρ1 ρ2 p0 p1 ρ1 ρ2 0.1 0.9 9 8.1 0.1 0.9 9 4.05 0.1 0.9 4.5 8.1 0.2 0.8 4.5 3.6 0.2 0.8 4.5 1.8 0.2 0.8 2.25 3.6 0.3 0.7 3 2.1 0.3 0.7 3 1.05 0.3 0.7 1.5 2.1 0.4 0.6 2.25 1.35 0.4 0.6 2.25 0.68 0.4 0.6 1.13 1.35 0.5 0.5 1.8 0.9 0.5 0.5 1.8 0.45 0.5 0.5 0.9 0.9 0.6 0.4 1.5 0.6 0.6 0.4 1.5 0.3 0.6 0.4 0.75 0.6 0.7 0.3 1.29 0.39 0.7 0.3 1.29 0.19 0.7 0.3 0.64 0.39 0.8 0.2 1.13 0.23 0.8 0.2 1.13 0.11 0.8 0.2 0.56 0.23 0.9 0.1 1 0.1 0.9 0.1 1 0.05 0.9 0.1 0.5 0.1 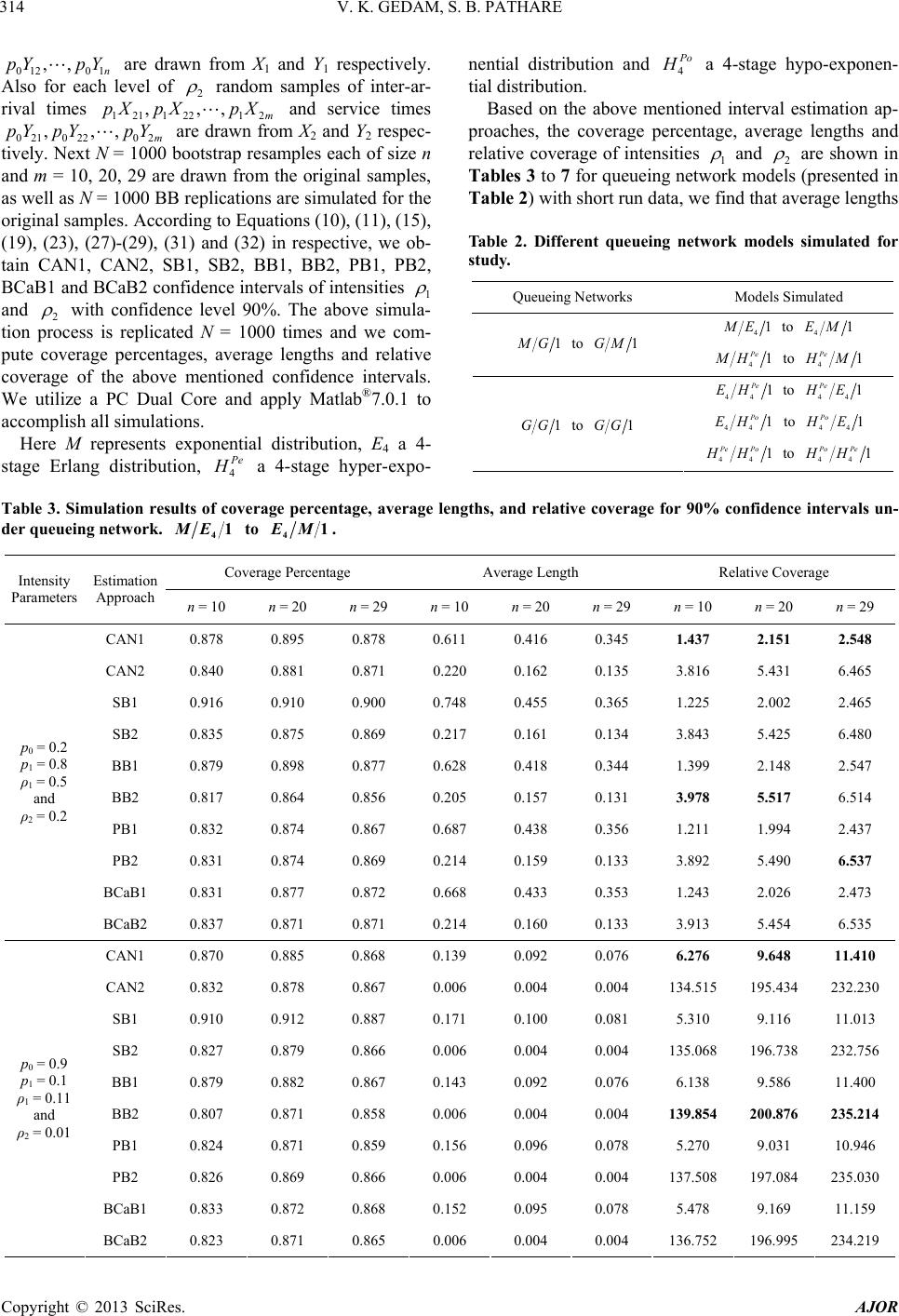 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 314 012 01 ,, n pY pY are drawn from X1 and Y1 respectively. Also for each level of 2 random samples of inter-ar- rival times 121 12212 ,,, m pX pXpX and service times 021 02202 ,,, m pY pYpY are drawn from X2 and Y2 respec- tively. Next N = 1000 bootstrap r esamples each of size n and m = 10, 20, 29 are drawn from the original samples, as well as N = 1000 BB replications are simulated for the original samples. According to Equations (10), (11), (15), (19), (23), (27)-(29), (31) and (32) in respective, we ob- tain CAN1, CAN2, SB1, SB2, BB1, BB2, PB1, PB2, BCaB1 and BCaB2 confidence intervals of intensities 1 and 2 with confidence level 90%. The above simula- tion process is replicated N = 1000 times and we com- pute coverage percentages, average lengths and relative coverage of the above mentioned confidence intervals. We utilize a PC Dual Core and apply Matlab®7.0.1 to accomplish all simulations. Here M represents exponential distribution, E4 a 4- stage Erlang distribution, 4 e a 4-stage hyper-expo- nential distribution and 4 o a 4-stage hypo-exponen- tial distribution. Based on the above mentioned interval estimation ap- proaches, the coverage percentage, average lengths and relative coverage of intensities 1 and 2 are shown in Tables 3 to 7 for queueing network models (presented in Table 2) with short run data, we find that average lengths Table 2. Different queueing network models simulated for study. Queueing Networks Models Simulated 41 E to 41EM 1 G to 1GM 41 Pe MH to 41 Pe M 44 1 Pe EH to 44 1 Pe E 44 1 Po EH to 44 1 Po E 1GG to 1GG 44 1 Pe Po HH to 44 1 Po Pe HH Table 3. Simulation results of coverage percentage, average lengths, and relative coverage for 90% confidence intervals un- der queueing network. 41ME to 41EM . Coverage Percentage Average Length Relative Coverage Intensity Parameters Estimation Approach n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 CAN1 0.878 0.895 0.878 0.611 0.416 0.345 1.437 2.151 2.548 CAN2 0.840 0.881 0.871 0.220 0.162 0.135 3.816 5.431 6.465 SB1 0.916 0.910 0.900 0.748 0.455 0.365 1.225 2.002 2.465 SB2 0.835 0.875 0.869 0.217 0.161 0.134 3.843 5.425 6.480 BB1 0.879 0.898 0.877 0.628 0.418 0.344 1.399 2.148 2.547 BB2 0.817 0.864 0.856 0.205 0.157 0.131 3.978 5.517 6.514 PB1 0.832 0.874 0.867 0.687 0.438 0.356 1.211 1.994 2.437 PB2 0.831 0.874 0.869 0.214 0.159 0.133 3.892 5.490 6.537 BCaB1 0.831 0.877 0.872 0.668 0.433 0.353 1.243 2.026 2.473 p0 = 0.2 p1 = 0.8 ρ1 = 0.5 and ρ2 = 0.2 BCaB2 0.837 0.871 0.871 0.214 0.160 0.133 3.913 5.454 6.535 CAN1 0.870 0.885 0.868 0.139 0.092 0.076 6.276 9.648 11.410 CAN2 0.832 0.878 0.867 0.006 0.004 0.004 134.515 195.434 232.230 SB1 0.910 0.912 0.887 0.171 0.100 0.081 5.310 9.116 11.013 SB2 0.827 0.879 0.866 0.006 0.004 0.004 135.068 196.738 232.756 BB1 0.879 0.882 0.867 0.143 0.092 0.076 6.138 9.586 11.400 BB2 0.807 0.871 0.858 0.006 0.004 0.004 139.854 200.876 235.214 PB1 0.824 0.871 0.859 0.156 0.096 0.078 5.270 9.031 10.946 PB2 0.826 0.869 0.866 0.006 0.004 0.004 137.508 197.084 235.030 BCaB1 0.833 0.872 0.868 0.152 0.095 0.078 5.478 9.169 11.159 p0 = 0.9 p1 = 0.1 ρ1 = 0.11 and ρ2 = 0.01 BCaB2 0.823 0.871 0.865 0.006 0.004 0.004 136.752 196.995 234.219 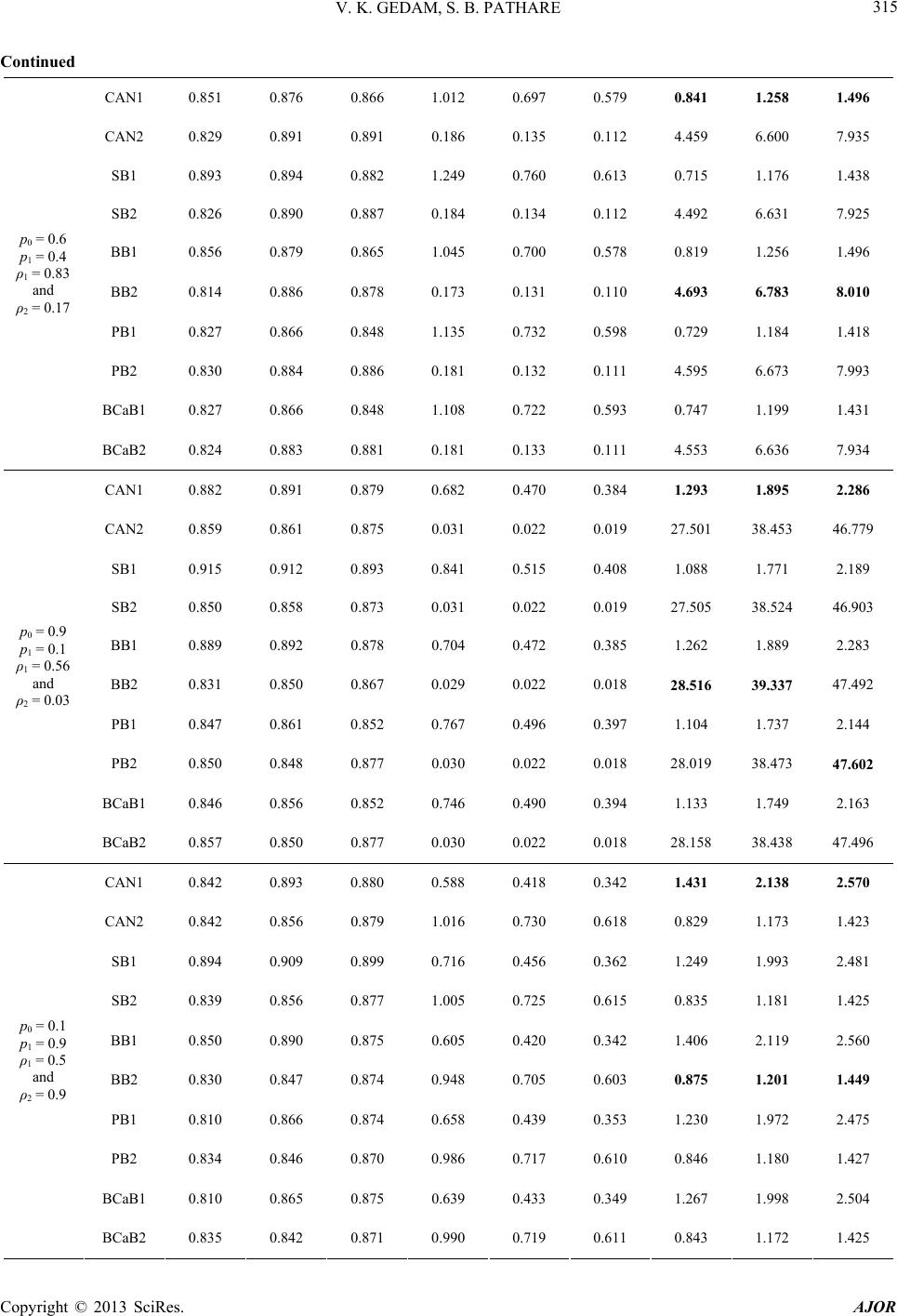 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 315 Continued CAN1 0.851 0.876 0.866 1.012 0.697 0.579 0.841 1.258 1.496 CAN2 0.829 0.891 0.891 0.186 0.135 0.112 4.459 6.600 7.935 SB1 0.893 0.894 0.882 1.249 0.760 0.613 0.715 1.176 1.438 SB2 0.826 0.890 0.887 0.184 0.134 0.112 4.492 6.631 7.925 BB1 0.856 0.879 0.865 1.045 0.700 0.578 0.819 1.256 1.496 BB2 0.814 0.886 0.878 0.173 0.131 0.110 4.693 6.783 8.010 PB1 0.827 0.866 0.848 1.135 0.732 0.598 0.729 1.184 1.418 PB2 0.830 0.884 0.886 0.181 0.132 0.111 4.595 6.673 7.993 BCaB1 0.827 0.866 0.848 1.108 0.722 0.593 0.747 1.199 1.431 p0 = 0.6 p1 = 0.4 ρ1 = 0.83 and ρ2 = 0.17 BCaB2 0.824 0.883 0.881 0.181 0.133 0.111 4.553 6.636 7.934 CAN1 0.882 0.891 0.879 0.682 0.470 0.384 1.293 1.895 2.286 CAN2 0.859 0.861 0.875 0.031 0.022 0.019 27.501 38.453 46.779 SB1 0.915 0.912 0.893 0.841 0.515 0.408 1.088 1.771 2.189 SB2 0.850 0.858 0.873 0.031 0.022 0.019 27.505 38.524 46.903 BB1 0.889 0.892 0.878 0.704 0.472 0.385 1.262 1.889 2.283 BB2 0.831 0.850 0.867 0.029 0.022 0.018 28.516 39.337 47.492 PB1 0.847 0.861 0.852 0.767 0.496 0.397 1.104 1.737 2.144 PB2 0.850 0.848 0.877 0.030 0.022 0.018 28.019 38.473 47.602 BCaB1 0.846 0.856 0.852 0.746 0.490 0.394 1.133 1.749 2.163 p0 = 0.9 p1 = 0.1 ρ1 = 0.56 and ρ2 = 0.03 BCaB2 0.857 0.850 0.877 0.030 0.022 0.018 28.158 38.438 47.496 CAN1 0.842 0.893 0.880 0.588 0.418 0.342 1.431 2.138 2.570 CAN2 0.842 0.856 0.879 1.016 0.730 0.618 0.829 1.173 1.423 SB1 0.894 0.909 0.899 0.716 0.456 0.362 1.249 1.993 2.481 SB2 0.839 0.856 0.877 1.005 0.725 0.615 0.835 1.181 1.425 BB1 0.850 0.890 0.875 0.605 0.420 0.342 1.406 2.119 2.560 BB2 0.830 0.847 0.874 0.948 0.705 0.603 0.875 1.201 1.449 PB1 0.810 0.866 0.874 0.658 0.439 0.353 1.230 1.972 2.475 PB2 0.834 0.846 0.870 0.986 0.717 0.610 0.846 1.180 1.427 BCaB1 0.810 0.865 0.875 0.639 0.433 0.349 1.267 1.998 2.504 p0 = 0.1 p1 = 0.9 ρ1 = 0.5 and ρ2 = 0.9 BCaB2 0.835 0.842 0.871 0.990 0.719 0.611 0.843 1.172 1.425 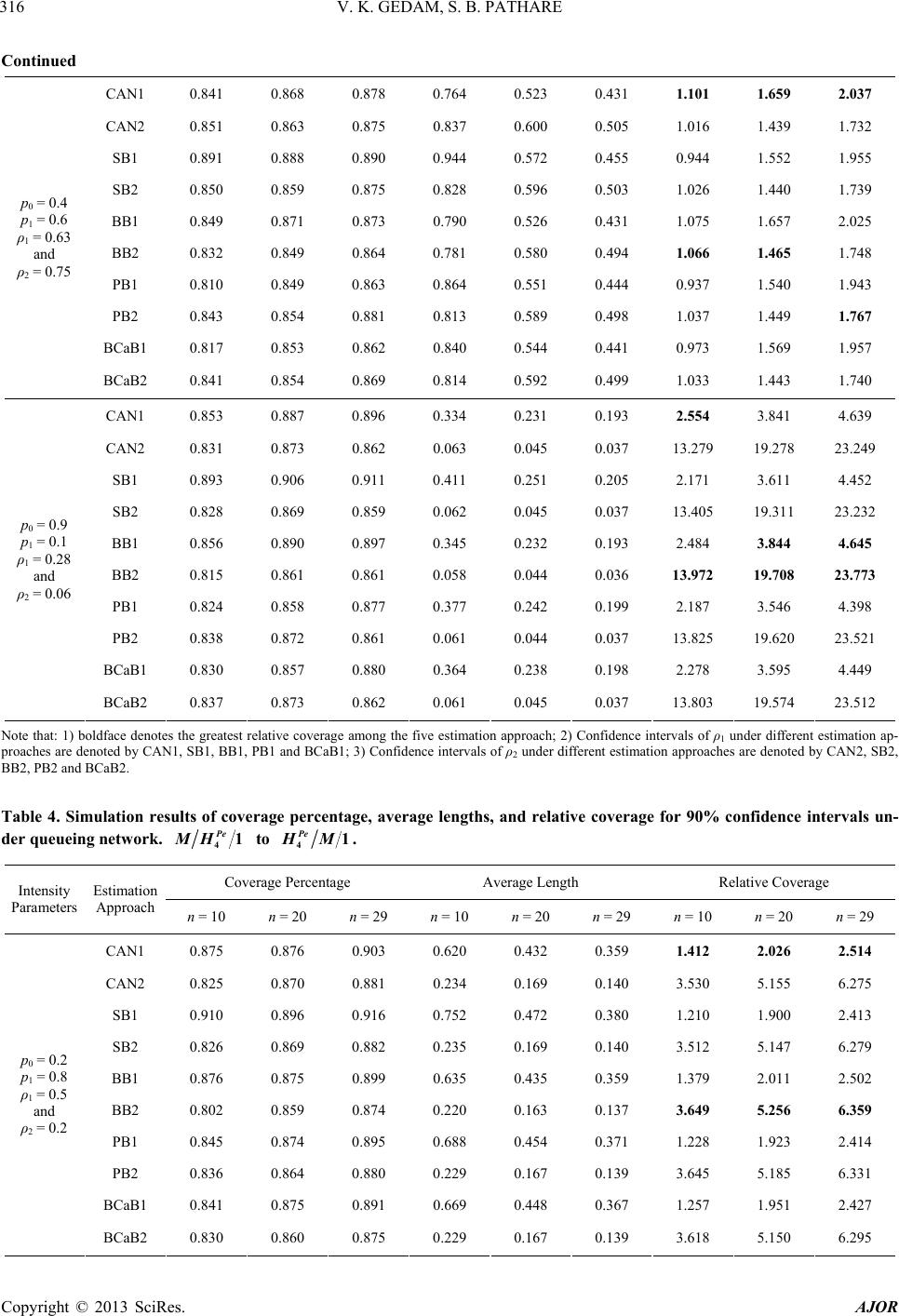 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 316 Continued CAN1 0.841 0.868 0.878 0.764 0.523 0.431 1.101 1.659 2.037 CAN2 0.851 0.863 0.875 0.837 0.600 0.505 1.016 1.439 1.732 SB1 0.891 0.888 0.890 0.944 0.572 0.455 0.944 1.552 1.955 SB2 0.850 0.859 0.875 0.828 0.596 0.503 1.026 1.440 1.739 BB1 0.849 0.871 0.873 0.790 0.526 0.431 1.075 1.657 2.025 BB2 0.832 0.849 0.864 0.781 0.580 0.494 1.066 1.465 1.748 PB1 0.810 0.849 0.863 0.864 0.551 0.444 0.937 1.540 1.943 PB2 0.843 0.854 0.881 0.813 0.589 0.498 1.037 1.449 1.767 BCaB1 0.817 0.853 0.862 0.840 0.544 0.441 0.973 1.569 1.957 p0 = 0.4 p1 = 0.6 ρ1 = 0.63 and ρ2 = 0.75 BCaB2 0.841 0.854 0.869 0.814 0.592 0.499 1.033 1.443 1.740 CAN1 0.853 0.887 0.896 0.334 0.231 0.193 2.554 3.841 4.639 CAN2 0.831 0.873 0.862 0.063 0.045 0.037 13.279 19.278 23.249 SB1 0.893 0.906 0.911 0.411 0.251 0.205 2.171 3.611 4.452 SB2 0.828 0.869 0.859 0.062 0.045 0.037 13.405 19.311 23.232 BB1 0.856 0.890 0.897 0.345 0.232 0.193 2.484 3.844 4.645 BB2 0.815 0.861 0.861 0.058 0.044 0.036 13.972 19.708 23.773 PB1 0.824 0.858 0.877 0.377 0.242 0.199 2.187 3.546 4.398 PB2 0.838 0.872 0.861 0.061 0.044 0.037 13.825 19.620 23.521 BCaB1 0.830 0.857 0.880 0.364 0.238 0.198 2.278 3.595 4.449 p0 = 0.9 p1 = 0.1 ρ1 = 0.28 and ρ2 = 0.06 BCaB2 0.837 0.873 0.862 0.061 0.045 0.037 13.803 19.574 23.512 Note that: 1) boldface denotes the greatest relative coverage among the five estimation approach; 2) Confidence intervals of ρ1 under different estimation ap- proaches are denoted by CAN1, SB1, BB1, PB1 and BCaB1; 3) Confidence intervals of ρ2 under different estimation approaches are denoted by CAN2, SB2, BB2, PB2 and BCaB2. Table 4. Simulation results of coverage percentage, average lengths, and relative coverage for 90% confidence intervals un- der queueing network. 41 Pe MH to 41 Pe HM. Coverage Percentage Average Length Relative Coverage Intensity Parameters Estimation Approach n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 CAN1 0.875 0.876 0.903 0.620 0.432 0.359 1.412 2.026 2.514 CAN2 0.825 0.870 0.881 0.234 0.169 0.140 3.530 5.155 6.275 SB1 0.910 0.896 0.916 0.752 0.472 0.380 1.210 1.900 2.413 SB2 0.826 0.869 0.882 0.235 0.169 0.140 3.512 5.147 6.279 BB1 0.876 0.875 0.899 0.635 0.435 0.359 1.379 2.011 2.502 BB2 0.802 0.859 0.874 0.220 0.163 0.137 3.649 5.256 6.359 PB1 0.845 0.874 0.895 0.688 0.454 0.371 1.228 1.923 2.414 PB2 0.836 0.864 0.880 0.229 0.167 0.139 3.645 5.185 6.331 BCaB1 0.841 0.875 0.891 0.669 0.448 0.367 1.257 1.951 2.427 p0 = 0.2 p1 = 0.8 ρ1 = 0.5 and ρ2 = 0.2 BCaB2 0.830 0.860 0.875 0.229 0.167 0.139 3.618 5.150 6.295 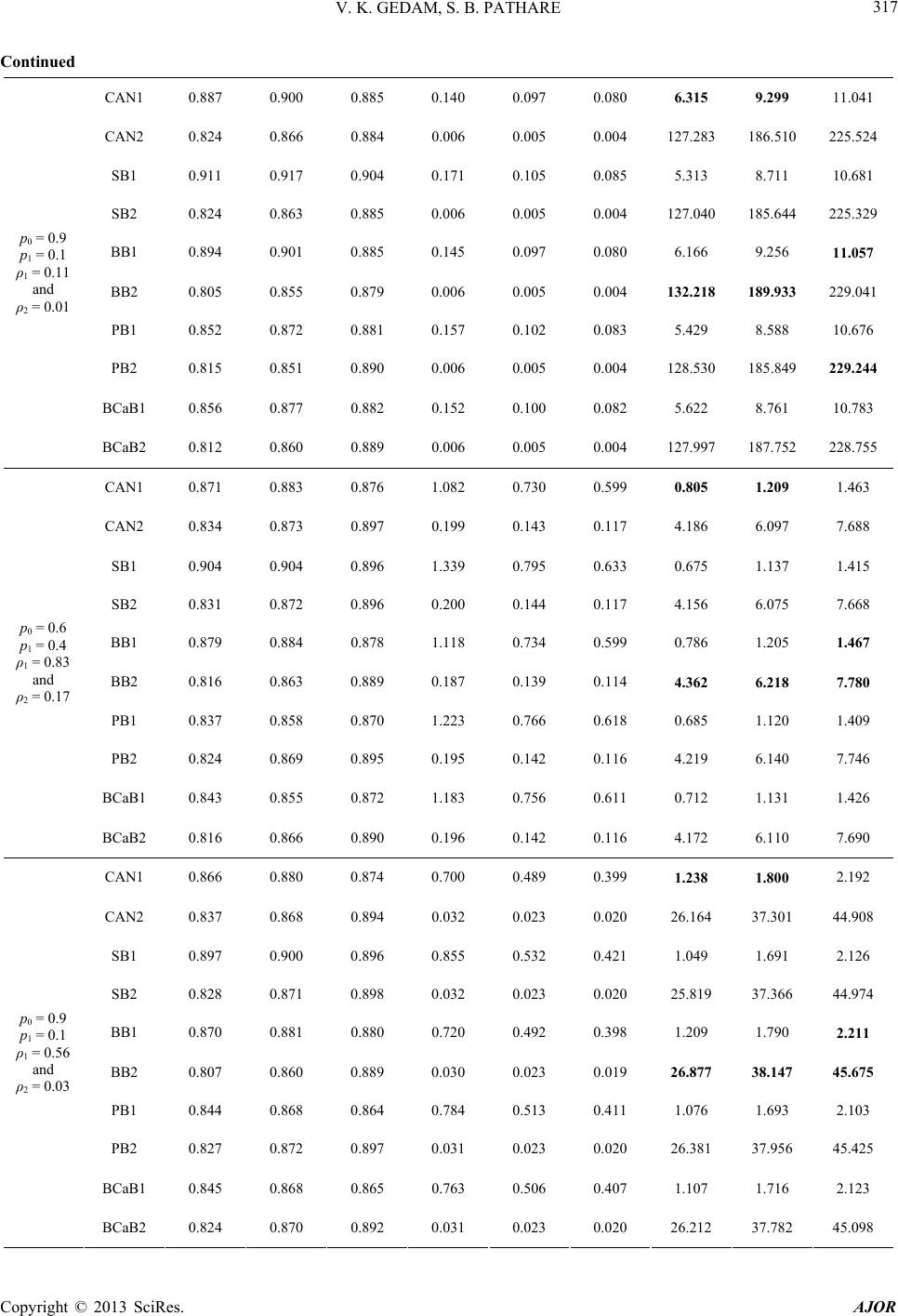 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 317 Continued CAN1 0.887 0.900 0.885 0.140 0.097 0.080 6.315 9.299 11.041 CAN2 0.824 0.866 0.884 0.006 0.005 0.004 127.283 186.510 225.524 SB1 0.911 0.917 0.904 0.171 0.105 0.085 5.313 8.711 10.681 SB2 0.824 0.863 0.885 0.006 0.005 0.004 127.040 185.644 225.329 BB1 0.894 0.901 0.885 0.145 0.097 0.080 6.166 9.256 11.057 BB2 0.805 0.855 0.879 0.006 0.005 0.004 132.218 189.933 229.041 PB1 0.852 0.872 0.881 0.157 0.102 0.083 5.429 8.588 10.676 PB2 0.815 0.851 0.890 0.006 0.005 0.004 128.530 185.849 229.244 BCaB1 0.856 0.877 0.882 0.152 0.100 0.082 5.622 8.761 10.783 p0 = 0.9 p1 = 0.1 ρ1 = 0.11 and ρ2 = 0.01 BCaB2 0.812 0.860 0.889 0.006 0.005 0.004 127.997 187.752 228.755 CAN1 0.871 0.883 0.876 1.082 0.730 0.599 0.805 1.209 1.463 CAN2 0.834 0.873 0.897 0.199 0.143 0.117 4.186 6.097 7.688 SB1 0.904 0.904 0.896 1.339 0.795 0.633 0.675 1.137 1.415 SB2 0.831 0.872 0.896 0.200 0.144 0.117 4.156 6.075 7.668 BB1 0.879 0.884 0.878 1.118 0.734 0.599 0.786 1.205 1.467 BB2 0.816 0.863 0.889 0.187 0.139 0.114 4.362 6.218 7.780 PB1 0.837 0.858 0.870 1.223 0.766 0.618 0.685 1.120 1.409 PB2 0.824 0.869 0.895 0.195 0.142 0.116 4.219 6.140 7.746 BCaB1 0.843 0.855 0.872 1.183 0.756 0.611 0.712 1.131 1.426 p0 = 0.6 p1 = 0.4 ρ1 = 0.83 and ρ2 = 0.17 BCaB2 0.816 0.866 0.890 0.196 0.142 0.116 4.172 6.110 7.690 CAN1 0.866 0.880 0.874 0.700 0.489 0.399 1.238 1.800 2.192 CAN2 0.837 0.868 0.894 0.032 0.023 0.020 26.164 37.301 44.908 SB1 0.897 0.900 0.896 0.855 0.532 0.421 1.049 1.691 2.126 SB2 0.828 0.871 0.898 0.032 0.023 0.020 25.819 37.366 44.974 BB1 0.870 0.881 0.880 0.720 0.492 0.398 1.209 1.790 2.211 BB2 0.807 0.860 0.889 0.030 0.023 0.019 26.877 38.147 45.675 PB1 0.844 0.868 0.864 0.784 0.513 0.411 1.076 1.693 2.103 PB2 0.827 0.872 0.897 0.031 0.023 0.020 26.381 37.956 45.425 BCaB1 0.845 0.868 0.865 0.763 0.506 0.407 1.107 1.716 2.123 p0 = 0.9 p1 = 0.1 ρ1 = 0.56 and ρ2 = 0.03 BCaB2 0.824 0.870 0.892 0.031 0.023 0.020 26.212 37.782 45.098 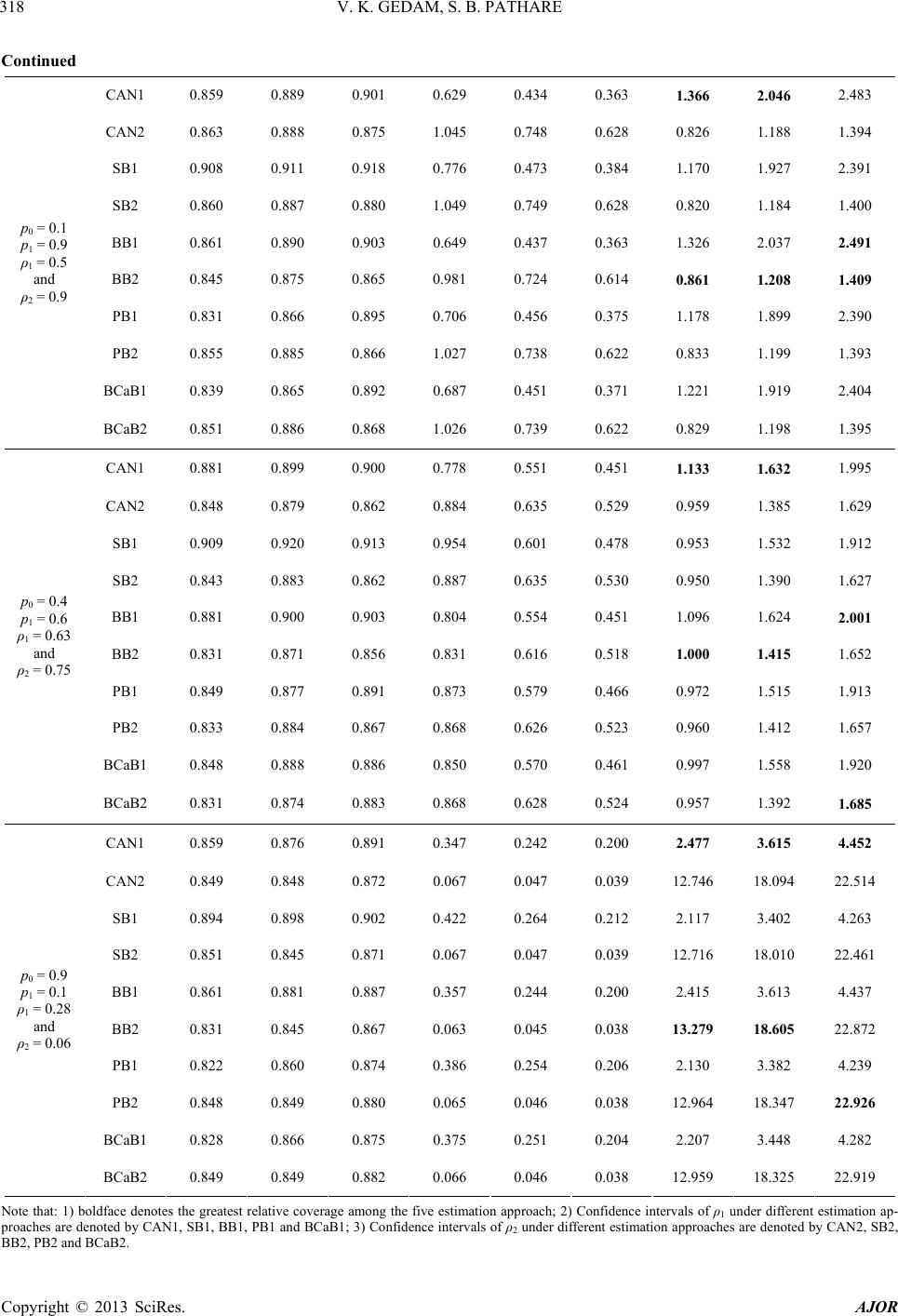 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 318 Continued CAN1 0.859 0.889 0.901 0.629 0.434 0.363 1.366 2.046 2.483 CAN2 0.863 0.888 0.875 1.045 0.748 0.628 0.826 1.188 1.394 SB1 0.908 0.911 0.918 0.776 0.473 0.384 1.170 1.927 2.391 SB2 0.860 0.887 0.880 1.049 0.749 0.628 0.820 1.184 1.400 BB1 0.861 0.890 0.903 0.649 0.437 0.363 1.326 2.037 2.491 BB2 0.845 0.875 0.865 0.981 0.724 0.614 0.861 1.208 1.409 PB1 0.831 0.866 0.895 0.706 0.456 0.375 1.178 1.899 2.390 PB2 0.855 0.885 0.866 1.027 0.738 0.622 0.833 1.199 1.393 BCaB1 0.839 0.865 0.892 0.687 0.451 0.371 1.221 1.919 2.404 p0 = 0.1 p1 = 0.9 ρ1 = 0.5 and ρ2 = 0.9 BCaB2 0.851 0.886 0.868 1.026 0.739 0.622 0.829 1.198 1.395 CAN1 0.881 0.899 0.900 0.778 0.551 0.451 1.133 1.632 1.995 CAN2 0.848 0.879 0.862 0.884 0.635 0.529 0.959 1.385 1.629 SB1 0.909 0.920 0.913 0.954 0.601 0.478 0.953 1.532 1.912 SB2 0.843 0.883 0.862 0.887 0.635 0.530 0.950 1.390 1.627 BB1 0.881 0.900 0.903 0.804 0.554 0.451 1.096 1.624 2.001 BB2 0.831 0.871 0.856 0.831 0.616 0.518 1.000 1.415 1.652 PB1 0.849 0.877 0.891 0.873 0.579 0.466 0.972 1.515 1.913 PB2 0.833 0.884 0.867 0.868 0.626 0.523 0.960 1.412 1.657 BCaB1 0.848 0.888 0.886 0.850 0.570 0.461 0.997 1.558 1.920 p0 = 0.4 p1 = 0.6 ρ1 = 0.63 and ρ2 = 0.75 BCaB2 0.831 0.874 0.883 0.868 0.628 0.524 0.957 1.392 1.685 CAN1 0.859 0.876 0.891 0.347 0.242 0.200 2.477 3.615 4.452 CAN2 0.849 0.848 0.872 0.067 0.047 0.039 12.746 18.094 22.514 SB1 0.894 0.898 0.902 0.422 0.264 0.212 2.117 3.402 4.263 SB2 0.851 0.845 0.871 0.067 0.047 0.039 12.716 18.010 22.461 BB1 0.861 0.881 0.887 0.357 0.244 0.200 2.415 3.613 4.437 BB2 0.831 0.845 0.867 0.063 0.045 0.038 13.279 18.605 22.872 PB1 0.822 0.860 0.874 0.386 0.254 0.206 2.130 3.382 4.239 PB2 0.848 0.849 0.880 0.065 0.046 0.038 12.964 18.347 22.926 BCaB1 0.828 0.866 0.875 0.375 0.251 0.204 2.207 3.448 4.282 p0 = 0.9 p1 = 0.1 ρ1 = 0.28 and ρ2 = 0.06 BCaB2 0.849 0.849 0.882 0.066 0.046 0.038 12.959 18.325 22.919 Note that: 1) boldface denotes the greatest relative coverage among the five estimation approach; 2) Confidence intervals of ρ1 under different estimation ap- proaches are denoted by CAN1, SB1, BB1, PB1 and BCaB1; 3) Confidence intervals of ρ2 under different estimation approaches are denoted by CAN2, SB2, BB2, PB2 and BCaB2. 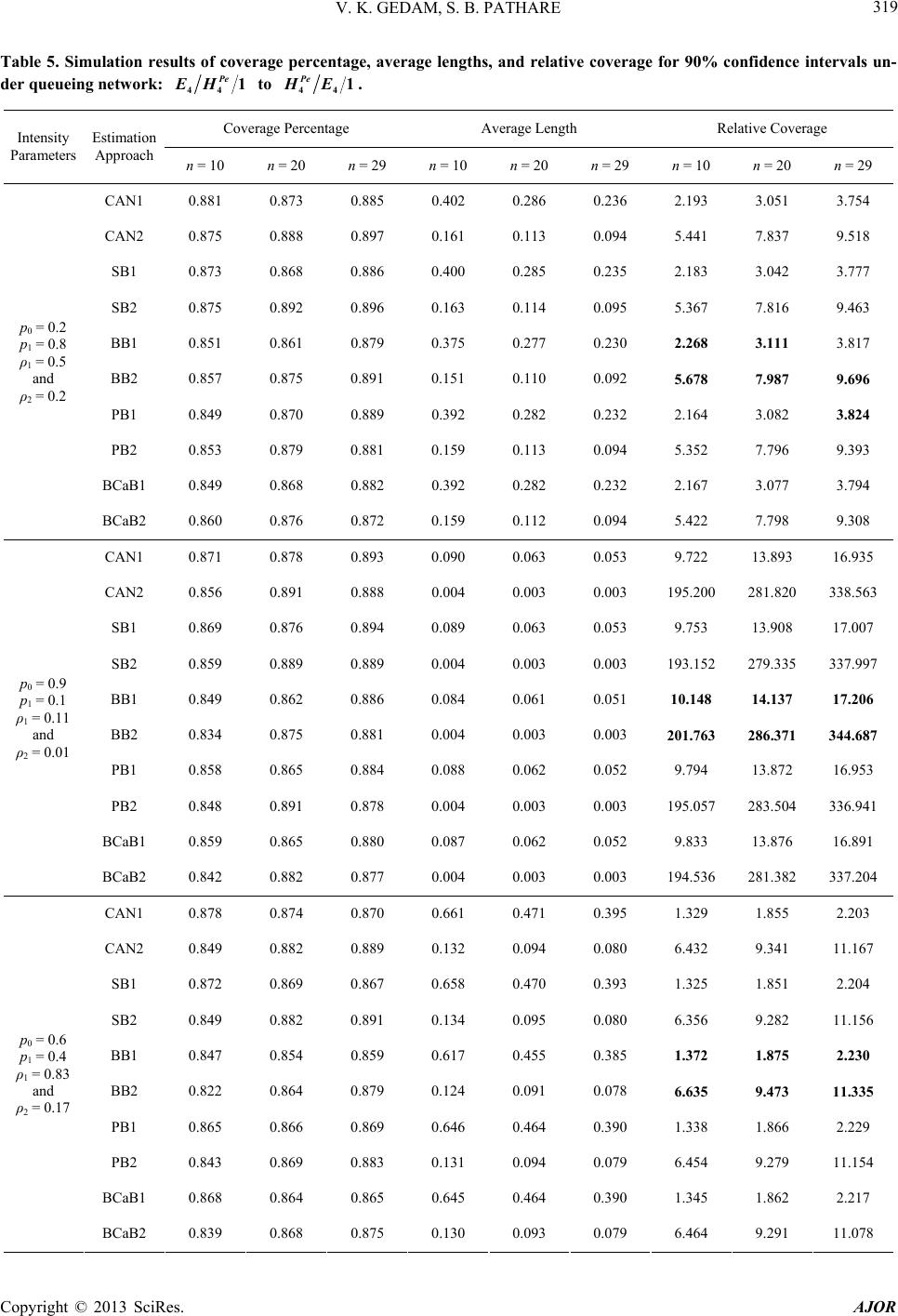 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 319 Table 5. Simulation results of coverage percentage, average lengths, and relative coverage for 90% confidence intervals un- der queueing network: 44 1 Pe EH to 44 1 Pe HE. Coverage Percentage Average Length Relative Coverage Intensity Parameters Estimation Approach n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 CAN1 0.881 0.873 0.885 0.402 0.286 0.236 2.193 3.051 3.754 CAN2 0.875 0.888 0.897 0.161 0.113 0.094 5.441 7.837 9.518 SB1 0.873 0.868 0.886 0.400 0.285 0.235 2.183 3.042 3.777 SB2 0.875 0.892 0.896 0.163 0.114 0.095 5.367 7.816 9.463 BB1 0.851 0.861 0.879 0.375 0.277 0.230 2.268 3.111 3.817 BB2 0.857 0.875 0.891 0.151 0.110 0.092 5.678 7.987 9.696 PB1 0.849 0.870 0.889 0.392 0.282 0.232 2.164 3.082 3.824 PB2 0.853 0.879 0.881 0.159 0.113 0.094 5.352 7.796 9.393 BCaB1 0.849 0.868 0.882 0.392 0.282 0.232 2.167 3.077 3.794 p0 = 0.2 p1 = 0.8 ρ1 = 0.5 and ρ2 = 0.2 BCaB2 0.860 0.876 0.872 0.159 0.112 0.094 5.422 7.798 9.308 CAN1 0.871 0.878 0.893 0.090 0.063 0.053 9.722 13.893 16.935 CAN2 0.856 0.891 0.888 0.004 0.003 0.003 195.200 281.820 338.563 SB1 0.869 0.876 0.894 0.089 0.063 0.053 9.753 13.908 17.007 SB2 0.859 0.889 0.889 0.004 0.003 0.003 193.152 279.335 337.997 BB1 0.849 0.862 0.886 0.084 0.061 0.051 10.148 14.137 17.206 BB2 0.834 0.875 0.881 0.004 0.003 0.003 201.763 286.371 344.687 PB1 0.858 0.865 0.884 0.088 0.062 0.052 9.794 13.872 16.953 PB2 0.848 0.891 0.878 0.004 0.003 0.003 195.057 283.504 336.941 BCaB1 0.859 0.865 0.880 0.087 0.062 0.052 9.833 13.876 16.891 p0 = 0.9 p1 = 0.1 ρ1 = 0.11 and ρ2 = 0.01 BCaB2 0.842 0.882 0.877 0.004 0.003 0.003 194.536 281.382 337.204 CAN1 0.878 0.874 0.870 0.661 0.471 0.395 1.329 1.855 2.203 CAN2 0.849 0.882 0.889 0.132 0.094 0.080 6.432 9.341 11.167 SB1 0.872 0.869 0.867 0.658 0.470 0.393 1.325 1.851 2.204 SB2 0.849 0.882 0.891 0.134 0.095 0.080 6.356 9.282 11.156 BB1 0.847 0.854 0.859 0.617 0.455 0.385 1.372 1.875 2.230 BB2 0.822 0.864 0.879 0.124 0.091 0.078 6.635 9.473 11.335 PB1 0.865 0.866 0.869 0.646 0.464 0.390 1.338 1.866 2.229 PB2 0.843 0.869 0.883 0.131 0.094 0.079 6.454 9.279 11.154 BCaB1 0.868 0.864 0.865 0.645 0.464 0.390 1.345 1.862 2.217 p0 = 0.6 p1 = 0.4 ρ1 = 0.83 and ρ2 = 0.17 BCaB2 0.839 0.868 0.875 0.130 0.093 0.079 6.464 9.291 11.078  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 320 Continued CAN1 0.858 0.875 0.891 0.452 0.320 0.263 1.897 2.730 3.390 CAN2 0.870 0.884 0.891 0.022 0.016 0.013 39.305 55.479 67.767 SB1 0.858 0.874 0.890 0.450 0.320 0.262 1.906 2.731 3.397 SB2 0.870 0.882 0.896 0.022 0.016 0.013 38.755 54.933 67.862 BB1 0.836 0.863 0.881 0.422 0.309 0.256 1.983 2.790 3.441 BB2 0.836 0.879 0.881 0.021 0.015 0.013 40.177 57.074 68.727 PB1 0.847 0.876 0.895 0.441 0.317 0.260 1.919 2.767 3.445 PB2 0.847 0.878 0.887 0.022 0.016 0.013 38.630 55.413 67.828 BCaB1 0.847 0.873 0.890 0.441 0.317 0.260 1.919 2.757 3.429 p0 = 0.9 p1 = 0.1 ρ1 = 0.56 and ρ2 = 0.03 BCaB2 0.843 0.878 0.883 0.022 0.016 0.013 38.676 55.614 67.700 CAN1 0.853 0.882 0.886 0.396 0.282 0.237 2.156 3.127 3.738 CAN2 0.879 0.895 0.877 0.723 0.504 0.425 1.216 1.777 2.064 SB1 0.852 0.880 0.889 0.393 0.281 0.236 2.167 3.129 3.761 SB2 0.882 0.897 0.875 0.736 0.506 0.426 1.199 1.771 2.055 BB1 0.829 0.866 0.877 0.369 0.272 0.231 2.247 3.184 3.795 BB2 0.863 0.885 0.868 0.681 0.486 0.414 1.268 1.822 2.095 PB1 0.850 0.869 0.887 0.386 0.278 0.234 2.203 3.124 3.785 PB2 0.869 0.901 0.857 0.718 0.501 0.421 1.211 1.799 2.033 BCaB1 0.843 0.869 0.883 0.384 0.278 0.234 2.194 3.126 3.767 p0 = 0.1 p1 = 0.9 ρ1 = 0.5 and ρ2 = 0.9 BCaB2 0.869 0.898 0.859 0.713 0.499 0.421 1.219 1.799 2.043 CAN1 0.858 0.890 0.891 0.503 0.358 0.295 1.707 2.485 3.018 CAN2 0.871 0.857 0.891 0.595 0.427 0.354 1.463 2.005 2.517 SB1 0.852 0.892 0.888 0.500 0.357 0.294 1.704 2.497 3.018 SB2 0.875 0.858 0.897 0.605 0.430 0.355 1.447 1.995 2.525 BB1 0.825 0.880 0.883 0.469 0.346 0.288 1.759 2.546 3.066 BB2 0.849 0.845 0.883 0.559 0.412 0.345 1.517 2.051 2.559 PB1 0.832 0.878 0.891 0.491 0.353 0.291 1.693 2.487 3.057 PB2 0.848 0.854 0.884 0.591 0.425 0.352 1.436 2.010 2.514 BCaB1 0.823 0.873 0.883 0.491 0.353 0.291 1.678 2.472 3.031 p0 = 0.4 p1 = 0.6 ρ1 = 0.63 and ρ2 = 0.75 BCaB2 0.853 0.848 0.881 0.586 0.424 0.351 1.455 2.001 2.510  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 321 Continued CAN1 0.878 0.880 0.874 0.227 0.157 0.131 3.875 5.588 6.657 CAN2 0.862 0.904 0.899 0.045 0.032 0.026 19.163 28.082 34.053 SB1 0.874 0.885 0.873 0.226 0.157 0.131 3.871 5.635 6.667 SB2 0.864 0.903 0.897 0.046 0.032 0.027 18.942 27.925 33.823 BB1 0.858 0.868 0.868 0.212 0.152 0.128 4.056 5.710 6.781 BB2 0.841 0.892 0.892 0.042 0.031 0.026 19.872 28.700 34.691 PB1 0.864 0.869 0.870 0.222 0.155 0.130 3.898 5.595 6.704 PB2 0.840 0.880 0.881 0.045 0.032 0.026 18.840 27.545 33.535 BCaB1 0.862 0.874 0.866 0.221 0.155 0.130 3.909 5.637 6.681 p0 = 0.9 p1 = 0.1 ρ1 = 0.28 and ρ2 = 0.06 BCaB2 0.839 0.880 0.887 0.044 0.032 0.026 18.928 27.640 33.815 Note that: 1) boldface denotes the greatest relative coverage among the five estimation approach; 2) Confidence intervals of ρ1 under different estimation ap- proaches are denoted by CAN1, SB1, BB1, PB1 and BCaB1; 3) Confidence intervals of ρ2 under different estimation approaches are denoted by CAN2, SB2, BB2, PB2 and BCaB2. Table 6. Simulation results of coverage percentage, average lengths, and relative coverage for 90% confidence intervals un- der queueing network: 44 1 Po EH to 44 1 Po HE. Coverage Percentage Average Length Relative Coverage Intensity Parameters Estimation Approach n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 CAN1 0.868 0.889 0.892 0.400 0.283 0.236 2.173 3.140 3.775 CAN2 0.863 0.883 0.877 0.159 0.115 0.094 5.421 7.646 9.316 SB1 0.865 0.888 0.895 0.397 0.282 0.236 2.179 3.149 3.796 SB2 0.866 0.885 0.878 0.162 0.116 0.094 5.355 7.611 9.300 BB1 0.845 0.883 0.883 0.373 0.273 0.230 2.268 3.240 3.835 BB2 0.843 0.871 0.871 0.150 0.112 0.092 5.632 7.805 9.498 PB1 0.846 0.884 0.891 0.390 0.279 0.234 2.171 3.169 3.812 PB2 0.850 0.875 0.866 0.158 0.115 0.094 5.379 7.626 9.256 BCaB1 0.847 0.874 0.889 0.388 0.279 0.234 2.181 3.138 3.806 p0 = 0.2 p1 = 0.8 ρ1 = 0.5 and ρ2 = 0.2 BCaB2 0.848 0.872 0.867 0.157 0.114 0.093 5.388 7.632 9.285 CAN1 0.873 0.900 0.894 0.089 0.063 0.052 9.794 14.320 17.061 CAN2 0.892 0.866 0.885 0.004 0.003 0.003 199.102 275.616 336.933 SB1 0.874 0.899 0.891 0.089 0.063 0.052 9.846 14.339 17.045 SB2 0.893 0.868 0.888 0.005 0.003 0.003 196.801 274.561 336.762 BB1 0.849 0.886 0.881 0.083 0.061 0.051 10.189 14.627 17.223 BB2 0.873 0.859 0.874 0.004 0.003 0.003 206.607 283.242 341.123 PB1 0.865 0.897 0.889 0.087 0.062 0.052 9.934 14.486 17.162 PB2 0.874 0.858 0.879 0.004 0.003 0.003 197.039 274.871 337.131 BCaB1 0.863 0.897 0.885 0.087 0.062 0.052 9.929 14.497 17.097 p0 = 0.9 p1 = 0.1 ρ1 = 0.11 and ρ2 = 0.01 BCaB2 0.872 0.859 0.888 0.004 0.003 0.003 197.877 275.862 341.255  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 322 Continued CAN1 0.870 0.888 0.870 0.661 0.473 0.391 1.316 1.878 2.226 CAN2 0.852 0.890 0.894 0.134 0.095 0.080 6.378 9.414 11.213 SB1 0.867 0.884 0.871 0.658 0.471 0.390 1.318 1.875 2.236 SB2 0.859 0.891 0.893 0.135 0.095 0.080 6.347 9.388 11.170 BB1 0.851 0.872 0.864 0.618 0.456 0.381 1.378 1.912 2.267 BB2 0.835 0.875 0.887 0.126 0.091 0.078 6.651 9.588 11.401 PB1 0.863 0.886 0.868 0.646 0.466 0.386 1.336 1.901 2.247 PB2 0.843 0.872 0.888 0.132 0.094 0.079 6.369 9.293 11.214 BCaB1 0.862 0.885 0.863 0.645 0.466 0.386 1.336 1.900 2.236 p0 = 0.6 p1 = 0.4 ρ1 = 0.83 and ρ2 = 0.17 BCaB2 0.837 0.870 0.885 0.132 0.094 0.079 6.362 9.302 11.196 CAN1 0.868 0.892 0.881 0.451 0.313 0.260 1.924 2.848 3.389 CAN2 0.855 0.889 0.888 0.022 0.016 0.013 38.912 56.159 67.891 SB1 0.868 0.890 0.882 0.449 0.312 0.259 1.932 2.850 3.400 SB2 0.855 0.886 0.889 0.022 0.016 0.013 38.389 55.660 67.803 BB1 0.846 0.873 0.872 0.421 0.303 0.254 2.009 2.885 3.438 BB2 0.837 0.871 0.881 0.021 0.015 0.013 40.525 56.991 69.056 PB1 0.852 0.885 0.871 0.441 0.309 0.257 1.931 2.868 3.388 PB2 0.841 0.891 0.884 0.022 0.016 0.013 38.677 56.728 68.080 BCaB1 0.853 0.878 0.872 0.440 0.308 0.257 1.940 2.846 3.390 p0 = 0.9 p1 = 0.1 ρ1 = 0.56 and ρ2 = 0.03 BCaB2 0.839 0.892 0.886 0.022 0.016 0.013 38.827 56.980 68.421 CAN1 0.856 0.889 0.896 0.393 0.283 0.239 2.178 3.137 3.754 CAN2 0.866 0.895 0.888 0.727 0.508 0.427 1.191 1.763 2.081 SB1 0.851 0.891 0.896 0.391 0.283 0.238 2.174 3.152 3.759 SB2 0.862 0.889 0.889 0.738 0.510 0.428 1.168 1.742 2.077 BB1 0.829 0.878 0.886 0.367 0.274 0.232 2.259 3.206 3.816 BB2 0.838 0.882 0.882 0.684 0.490 0.416 1.225 1.798 2.121 PB1 0.851 0.888 0.882 0.385 0.279 0.236 2.213 3.179 3.731 PB2 0.836 0.876 0.874 0.722 0.504 0.424 1.158 1.739 2.064 BCaB1 0.848 0.881 0.885 0.384 0.279 0.236 2.210 3.155 3.746 p0 = 0.1 p1 = 0.9 ρ1 = 0.5 and ρ2 = 0.9 BCaB2 0.840 0.875 0.880 0.716 0.502 0.423 1.173 1.742 2.083 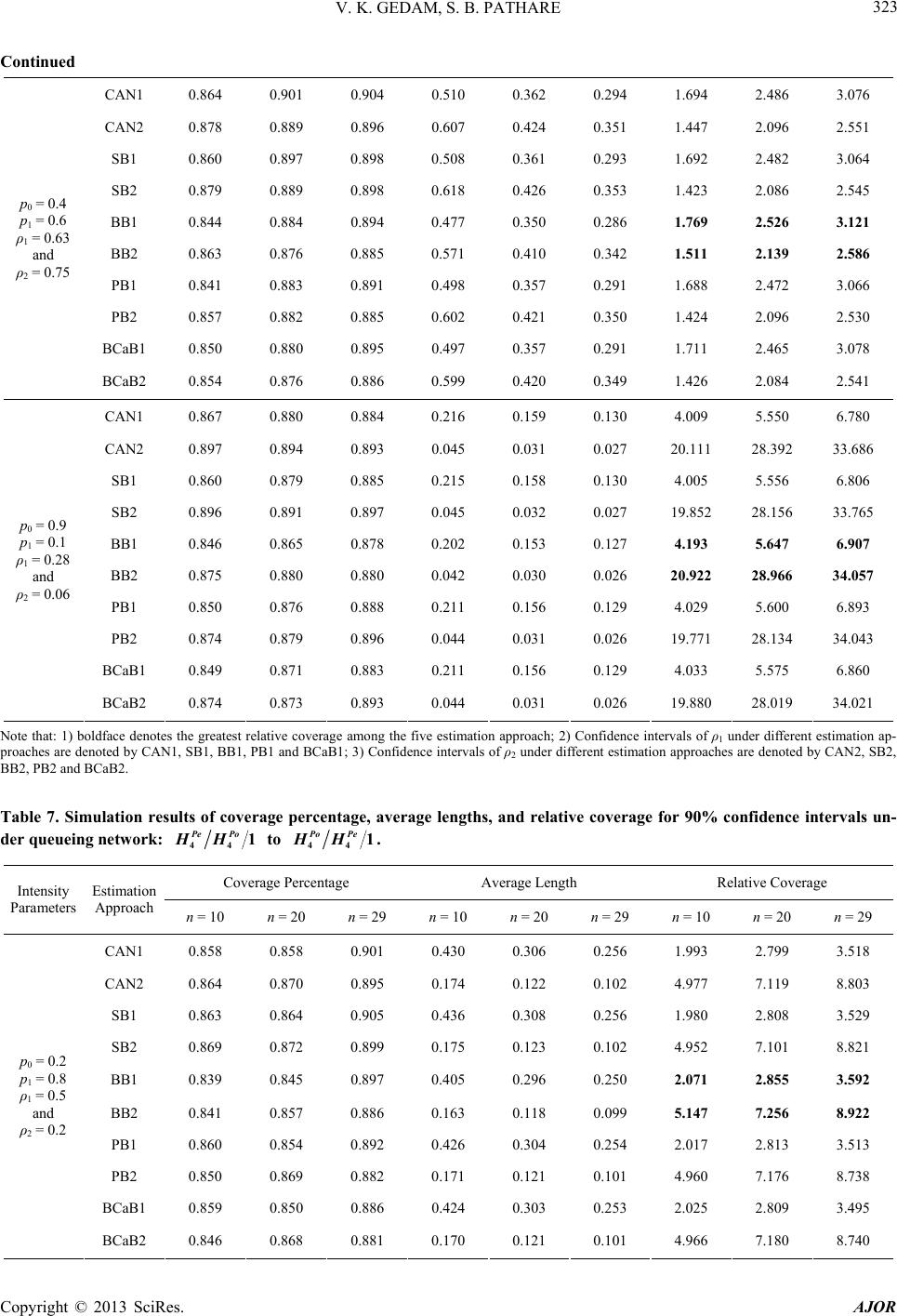 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 323 Continued CAN1 0.864 0.901 0.904 0.510 0.362 0.294 1.694 2.486 3.076 CAN2 0.878 0.889 0.896 0.607 0.424 0.351 1.447 2.096 2.551 SB1 0.860 0.897 0.898 0.508 0.361 0.293 1.692 2.482 3.064 SB2 0.879 0.889 0.898 0.618 0.426 0.353 1.423 2.086 2.545 BB1 0.844 0.884 0.894 0.477 0.350 0.286 1.769 2.526 3.121 BB2 0.863 0.876 0.885 0.571 0.410 0.342 1.511 2.139 2.586 PB1 0.841 0.883 0.891 0.498 0.357 0.291 1.688 2.472 3.066 PB2 0.857 0.882 0.885 0.602 0.421 0.350 1.424 2.096 2.530 BCaB1 0.850 0.880 0.895 0.497 0.357 0.291 1.711 2.465 3.078 p0 = 0.4 p1 = 0.6 ρ1 = 0.63 and ρ2 = 0.75 BCaB2 0.854 0.876 0.886 0.599 0.420 0.349 1.426 2.084 2.541 CAN1 0.867 0.880 0.884 0.216 0.159 0.130 4.009 5.550 6.780 CAN2 0.897 0.894 0.893 0.045 0.031 0.027 20.111 28.392 33.686 SB1 0.860 0.879 0.885 0.215 0.158 0.130 4.005 5.556 6.806 SB2 0.896 0.891 0.897 0.045 0.032 0.027 19.852 28.156 33.765 BB1 0.846 0.865 0.878 0.202 0.153 0.127 4.193 5.647 6.907 BB2 0.875 0.880 0.880 0.042 0.030 0.026 20.922 28.966 34.057 PB1 0.850 0.876 0.888 0.211 0.156 0.129 4.029 5.600 6.893 PB2 0.874 0.879 0.896 0.044 0.031 0.026 19.771 28.134 34.043 BCaB1 0.849 0.871 0.883 0.211 0.156 0.129 4.033 5.575 6.860 p0 = 0.9 p1 = 0.1 ρ1 = 0.28 and ρ2 = 0.06 BCaB2 0.874 0.873 0.893 0.044 0.031 0.026 19.880 28.019 34.021 Note that: 1) boldface denotes the greatest relative coverage among the five estimation approach; 2) Confidence intervals of ρ1 under different estimation ap- proaches are denoted by CAN1, SB1, BB1, PB1 and BCaB1; 3) Confidence intervals of ρ2 under different estimation approaches are denoted by CAN2, SB2, BB2, PB2 and BCaB2. Table 7. Simulation results of coverage percentage, average lengths, and relative coverage for 90% confidence intervals un- der queueing network: 44 1 Pe Po HH to 44 1 Po Pe HH . Coverage Percentage Average Length Relative Coverage Intensity Parameters Estimation Approach n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 n = 10 n = 20 n = 29 CAN1 0.858 0.858 0.901 0.430 0.306 0.256 1.993 2.799 3.518 CAN2 0.864 0.870 0.895 0.174 0.122 0.102 4.977 7.119 8.803 SB1 0.863 0.864 0.905 0.436 0.308 0.256 1.980 2.808 3.529 SB2 0.869 0.872 0.899 0.175 0.123 0.102 4.952 7.101 8.821 BB1 0.839 0.845 0.897 0.405 0.296 0.250 2.071 2.855 3.592 BB2 0.841 0.857 0.886 0.163 0.118 0.099 5.147 7.256 8.922 PB1 0.860 0.854 0.892 0.426 0.304 0.254 2.017 2.813 3.513 PB2 0.850 0.869 0.882 0.171 0.121 0.101 4.960 7.176 8.738 BCaB1 0.859 0.850 0.886 0.424 0.303 0.253 2.025 2.809 3.495 p0 = 0.2 p1 = 0.8 ρ1 = 0.5 and ρ2 = 0.2 BCaB2 0.846 0.868 0.881 0.170 0.121 0.101 4.966 7.180 8.740 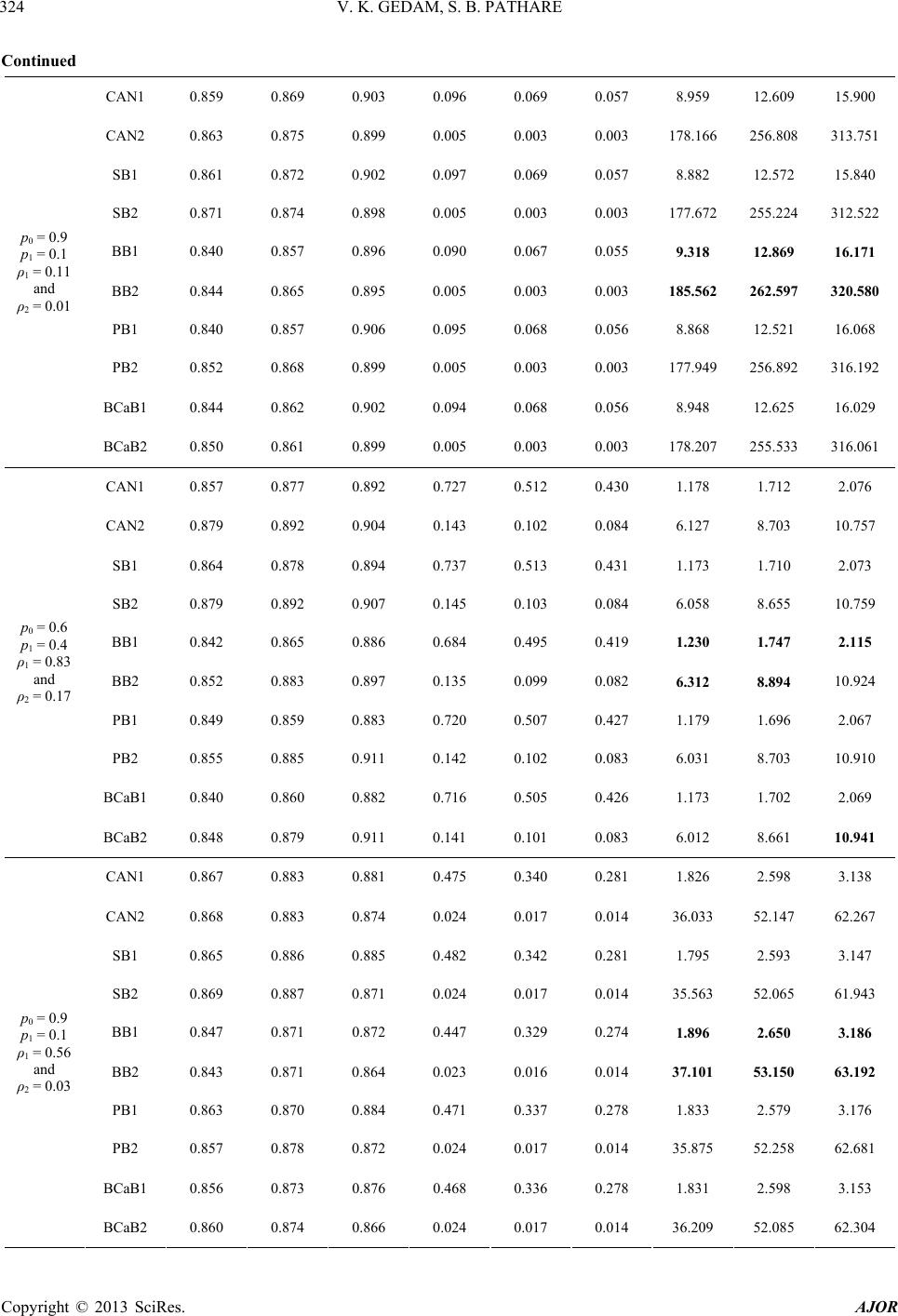 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 324 Continued CAN1 0.859 0.869 0.903 0.096 0.069 0.057 8.959 12.609 15.900 CAN2 0.863 0.875 0.899 0.005 0.003 0.003 178.166 256.808 313.751 SB1 0.861 0.872 0.902 0.097 0.069 0.057 8.882 12.572 15.840 SB2 0.871 0.874 0.898 0.005 0.003 0.003 177.672 255.224 312.522 BB1 0.840 0.857 0.896 0.090 0.067 0.055 9.318 12.869 16.171 BB2 0.844 0.865 0.895 0.005 0.003 0.003 185.562 262.597 320.580 PB1 0.840 0.857 0.906 0.095 0.068 0.056 8.868 12.521 16.068 PB2 0.852 0.868 0.899 0.005 0.003 0.003 177.949 256.892 316.192 BCaB1 0.844 0.862 0.902 0.094 0.068 0.056 8.948 12.625 16.029 p0 = 0.9 p1 = 0.1 ρ1 = 0.11 and ρ2 = 0.01 BCaB2 0.850 0.861 0.899 0.005 0.003 0.003 178.207 255.533 316.061 CAN1 0.857 0.877 0.892 0.727 0.512 0.430 1.178 1.712 2.076 CAN2 0.879 0.892 0.904 0.143 0.102 0.084 6.127 8.703 10.757 SB1 0.864 0.878 0.894 0.737 0.513 0.431 1.173 1.710 2.073 SB2 0.879 0.892 0.907 0.145 0.103 0.084 6.058 8.655 10.759 BB1 0.842 0.865 0.886 0.684 0.495 0.419 1.230 1.747 2.115 BB2 0.852 0.883 0.897 0.135 0.099 0.082 6.312 8.894 10.924 PB1 0.849 0.859 0.883 0.720 0.507 0.427 1.179 1.696 2.067 PB2 0.855 0.885 0.911 0.142 0.102 0.083 6.031 8.703 10.910 BCaB1 0.840 0.860 0.882 0.716 0.505 0.426 1.173 1.702 2.069 p0 = 0.6 p1 = 0.4 ρ1 = 0.83 and ρ2 = 0.17 BCaB2 0.848 0.879 0.911 0.141 0.101 0.083 6.012 8.661 10.941 CAN1 0.867 0.883 0.881 0.475 0.340 0.281 1.826 2.598 3.138 CAN2 0.868 0.883 0.874 0.024 0.017 0.014 36.033 52.147 62.267 SB1 0.865 0.886 0.885 0.482 0.342 0.281 1.795 2.593 3.147 SB2 0.869 0.887 0.871 0.024 0.017 0.014 35.563 52.065 61.943 BB1 0.847 0.871 0.872 0.447 0.329 0.274 1.896 2.650 3.186 BB2 0.843 0.871 0.864 0.023 0.016 0.014 37.101 53.150 63.192 PB1 0.863 0.870 0.884 0.471 0.337 0.278 1.833 2.579 3.176 PB2 0.857 0.878 0.872 0.024 0.017 0.014 35.875 52.258 62.681 BCaB1 0.856 0.873 0.876 0.468 0.336 0.278 1.831 2.598 3.153 p0 = 0.9 p1 = 0.1 ρ1 = 0.56 and ρ2 = 0.03 BCaB2 0.860 0.874 0.866 0.024 0.017 0.014 36.209 52.085 62.304 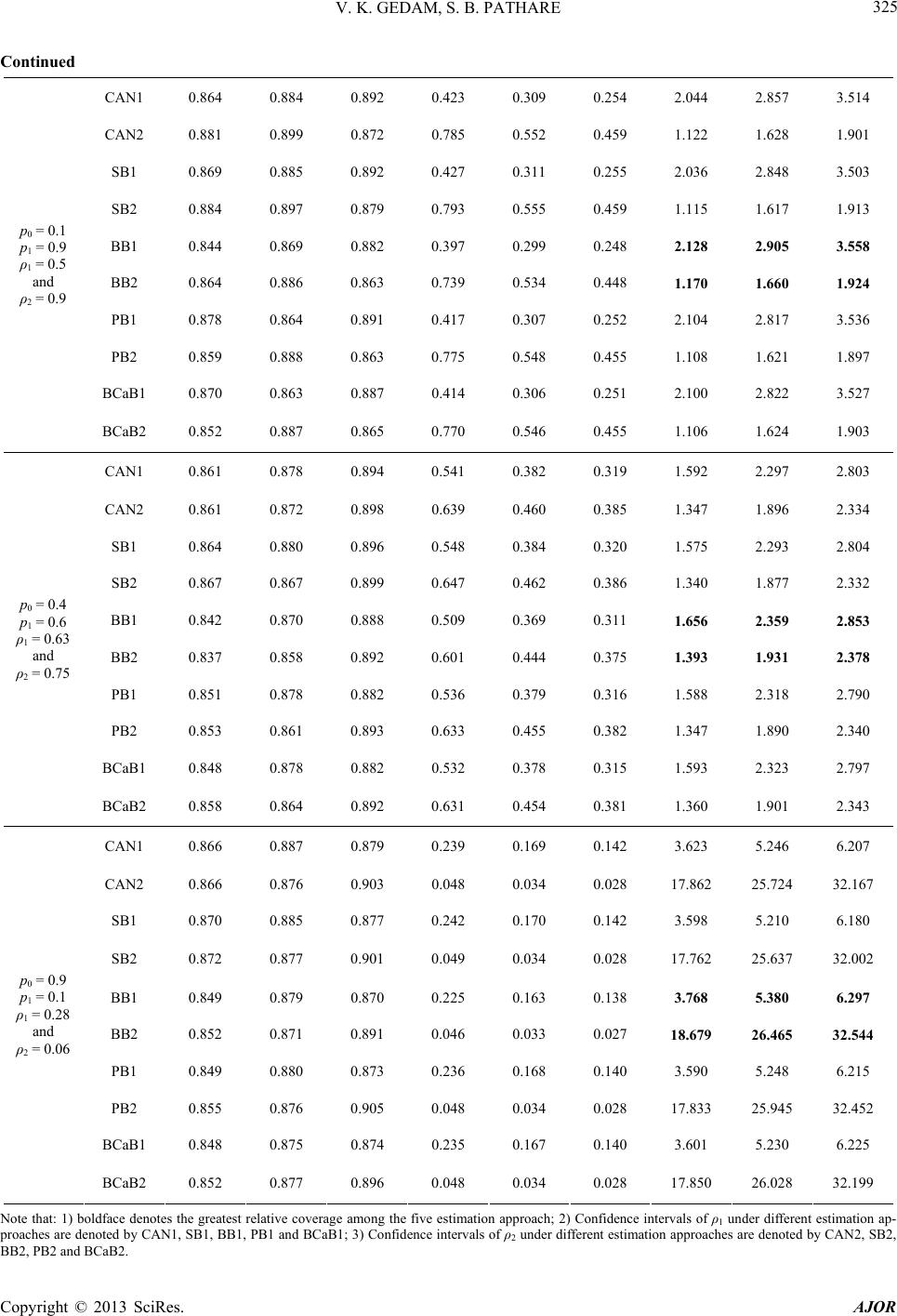 V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 325 Continued CAN1 0.864 0.884 0.892 0.423 0.309 0.254 2.044 2.857 3.514 CAN2 0.881 0.899 0.872 0.785 0.552 0.459 1.122 1.628 1.901 SB1 0.869 0.885 0.892 0.427 0.311 0.255 2.036 2.848 3.503 SB2 0.884 0.897 0.879 0.793 0.555 0.459 1.115 1.617 1.913 BB1 0.844 0.869 0.882 0.397 0.299 0.248 2.128 2.905 3.558 BB2 0.864 0.886 0.863 0.739 0.534 0.448 1.170 1.660 1.924 PB1 0.878 0.864 0.891 0.417 0.307 0.252 2.104 2.817 3.536 PB2 0.859 0.888 0.863 0.775 0.548 0.455 1.108 1.621 1.897 BCaB1 0.870 0.863 0.887 0.414 0.306 0.251 2.100 2.822 3.527 p0 = 0.1 p1 = 0.9 ρ1 = 0.5 and ρ2 = 0.9 BCaB2 0.852 0.887 0.865 0.770 0.546 0.455 1.106 1.624 1.903 CAN1 0.861 0.878 0.894 0.541 0.382 0.319 1.592 2.297 2.803 CAN2 0.861 0.872 0.898 0.639 0.460 0.385 1.347 1.896 2.334 SB1 0.864 0.880 0.896 0.548 0.384 0.320 1.575 2.293 2.804 SB2 0.867 0.867 0.899 0.647 0.462 0.386 1.340 1.877 2.332 BB1 0.842 0.870 0.888 0.509 0.369 0.311 1.656 2.359 2.853 BB2 0.837 0.858 0.892 0.601 0.444 0.375 1.393 1.931 2.378 PB1 0.851 0.878 0.882 0.536 0.379 0.316 1.588 2.318 2.790 PB2 0.853 0.861 0.893 0.633 0.455 0.382 1.347 1.890 2.340 BCaB1 0.848 0.878 0.882 0.532 0.378 0.315 1.593 2.323 2.797 p0 = 0.4 p1 = 0.6 ρ1 = 0.63 and ρ2 = 0.75 BCaB2 0.858 0.864 0.892 0.631 0.454 0.381 1.360 1.901 2.343 CAN1 0.866 0.887 0.879 0.239 0.169 0.142 3.623 5.246 6.207 CAN2 0.866 0.876 0.903 0.048 0.034 0.028 17.862 25.724 32.167 SB1 0.870 0.885 0.877 0.242 0.170 0.142 3.598 5.210 6.180 SB2 0.872 0.877 0.901 0.049 0.034 0.028 17.762 25.637 32.002 BB1 0.849 0.879 0.870 0.225 0.163 0.138 3.768 5.380 6.297 BB2 0.852 0.871 0.891 0.046 0.033 0.027 18.679 26.465 32.544 PB1 0.849 0.880 0.873 0.236 0.168 0.140 3.590 5.248 6.215 PB2 0.855 0.876 0.905 0.048 0.034 0.028 17.833 25.945 32.452 BCaB1 0.848 0.875 0.874 0.235 0.167 0.140 3.601 5.230 6.225 p0 = 0.9 p1 = 0.1 ρ1 = 0.28 and ρ2 = 0.06 BCaB2 0.852 0.877 0.896 0.048 0.034 0.028 17.850 26.028 32.199 Note that: 1) boldface denotes the greatest relative coverage among the five estimation approach; 2) Confidence intervals of ρ1 under different estimation ap- proaches are denoted by CAN1, SB1, BB1, PB1 and BCaB1; 3) Confidence intervals of ρ2 under different estimation approaches are denoted by CAN2, SB2, BB2, PB2 and BCaB2.  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 326 are decreasing as p0 approaches 1 (p1 approaches 0) but both coverage percentages and relative coverage are in- creasing as p0 approaches 1 (p1 approaches 0). Also we find that average lengths are decreasing with sample size n but both coverage percentages and relative coverage are increasing with sample size n. From Tables 3 to 7 one can observe that the coverage percentage can approach to 90% when n increases up to 29. 1) In queueing network models 41ME to 41EM and 41 Pe MH to 41 Pe M, the estimation approach CAN and BB has the greatest relative coverage among the five confidence intervals for 1 and 2 respectively for diffe r ent values of p0 and p1. 2) In queueing network models 44 1 Pe EH to 44 1 Pe E, 44 1 Po EH to 44 1 Po E and 44 1 Pe Po HH to 44 1 Po Pe HH , the estimation approach BB has the greatest relative coverage among the five confidence intervals for 1 and 2 for different values of p0 and p1. 3) Average lengths are decreasing as sample size n in- creases for both 1 and 2 . Also relative coverage in- creases with n for 1 and 2 . 4) Some poor coverage percentage of above confi- dence intervals with respect to the nominal level 90% may be due to small sample size n. 8. Conclusion This paper provides the interval esti mations of intens ities 1 and 2 for an open qu eueing network w ith feedb ack. Different estimation approaches CAN, SB, BB, PB and BCaB are applied to produce confidence intervals for intensities 1 and 2 . The relative coverage is adopted to understand, compare and assess performance of the resulted confidence intervals. From simulation study it is clear that CAN and BB method has the best performance on interval estimation of intensities 1 and 2 for 1 G to 1 G queueing network and BB method has the best performance on interval estimation of inten- sities 1 and 2 for 1GG to 1GG queueing net- work with short run data. And ap proach is easily applied to practical queueing network system such as all types of open, closed, mixed queueing networks as well as cyclic, retrial queueing models. REFERENCES [1] R. L. Disney, “Random Flow in Queueing Networks: A Review and a Critique,” A.I.E.E. Transactions, Vo l. 8, No. 1, 1975, pp. 268-288. [2] P. J. Burke, “Proof of Conjecture on the Inter-Arrival Time Distribution in M/M/1 Queue with Feedback,” IEEE Transactions on Communications, Vol. 24, No. 5, 1976, pp. 175-178. doi:10.1109/TCOM.1976.1093335 [3] F.J. Beautler and B. Melamed, “Decomposition and Cus- tomer Streams of Feedback Networks of Queues in Equi- librium,” Operation Research, Vol. 26, No. 6, 1978, pp. 1059-1072. doi:10.1287/opre.26.6.1059 [4] J. R. Jackson, “Networks of Waiting Lines,” Operations Research, Vol. 5, No. 4, 1957, pp. 518-521. doi:10.1287/opre.5.4.518 [5] B. Simon and R. D. Foley, “Some Results on Sojourn Times in Acyclic Jackson Network,” Management Sci- ence, Vol. 25, No. 10, 1979, pp. 1027-1034. doi:10.1287/mnsc.25.10.1027 [6] B. Melamed, “Sojourn Times in Queueing Networks,” Technical Report, Department of Industrial Engineering and Manage ment Sciences, Nort hwestern Univer sity, Evan- ston, 1980. [7] R. L. Disney and P. C. Kiessler, “Traffic Processes in Queueing Networks: A Markov Renewal Approach,” Johns Hopkins University Press, Baltimore, 1987. [8] D. Thiruvaiyaru, I. V. Basava and U. N. Bhat, “Estima- tion for a Class of Simple Queueing Network,” Queueing Systems, Vol. 9, No. 3, 1991, pp. 301-312. doi:10.1007/BF01158468 [9] D. Thiruvaiyaru and I. V. Basava, “Maximum Likelihood Estimation for Queueing Networks,” In: B. L. S. Prakasa Rao and B. R. Bhat, Eds., Stochastic Processes and Sta- tistical Inference, New Age International Publications, New Delhi, 1996, pp. 132-149. [10] L. Kleinrock, “Queueing Systems, Vol. II: Computer Ap- plications,” John Wiley & Sons, New York, 1976. [11] P. J. Denning and J. P. Buzen, “The Operational Analysis of Queueing Network Models,” ACM Computing Surveys, Vol. 10, No. 3, 1978, pp. 225-261. [12] B. Efron, “Bootstrap Methods: Another Look at the Jack- knife,” Annals of Statistics, Vol. 7, No. 1, 1979, pp. 1-26. doi:10.1214/aos/1176344552 [13] B. Efron, “The Jackknife, the Bootstrap, and Other Re- sampling Plans,” CBMS-NSF Regional Conference Series in Applied Mathematics, Monograph 38, SIAM, Phila- delphia, 1982. [14] B. Efron, “Better Bootstrap Confidence Intervals,” Jour- nal of the American Statistical Association, Vol. 82, No. 397, 1987, pp. 171-200. doi:10.2307/2289144 [15] D. B. Rubin, “The Bayesian Bootstrap,” The Annals of Statistics, Vol. 9, No. 1, 1981, pp. 130-134. doi:10.1214/aos/1176345338 [16] R. G. Miller, “The Jackknife: A Review,” Biometrika, Vol. 61, No. 1, 1974, pp. 1-15. [17] Y.-K. Chu and J.-C. Ke, “Confidence Intervals of Mean Response Time for an M/G/1 Queueing System: Boot- strap Simulation,” Applied Mathematics and Computation, Vol. 180, No. 1, 2006, pp. 255-263. doi:10.1016/j.amc.2005.11.145 [18] Y. K. Chu and J.C. Ke, Interval Estimation of Mean Re- sponse Time for a G/M/1 Queueing System: Empirical Laplace Function Approach,” Mathematical Methods in the Applied Sciences, Vol. 30, No. 6, 2006, pp. 707-715. doi:10.1002/mma.806 [19] J. C. Ke and Y. K. Chu, “Nonparametric and Simulated Analysis of Intensity for Queueing System,” Applied  V. K. GEDAM, S. B. PATHARE Copyright © 2013 SciRes. AJOR 327 Mathematics and Computation, Vol. 183, No. 2, 2006, pp. 1280-1291. doi:10.1016/j.amc.2006.05.163 [20] J. C. Ke and Y. K. Chu, “Comparison on Five Estimation Approaches of Intensity for a Queueing Sy stem with Short Run,” Computational Statistics, Vol. 24, No. 4, 2009, pp. 567-582. [21] R. V. Hogg, A. T. Craig and J. W. McKean, “Introduction to Mathematical Statistics,” 6th Edition, Prentice-Hall, Inc., Upper Saddle River, 2011.
|