Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2010, 1, 288-292 doi:10.4236/am.2010.14037 Published Online October 2010 (http://www.SciRP.org/journal/am) Copyright © 2010 SciRes. AM Artificial Neural Networks Approach for Solving Stokes Problem Modjtaba Baymani, Asghar Kerayechian, Sohrab Effati Department of Mathematics, Ferdowsi University of Mashhad, Mashhad, Iran E-mail: mhbaymani@yahoo.com, krachian@gmail.com, s-effati@um.ac.ir Received July 10, 2010; revised August 11, 2010; accepted August 14, 2010 Abstract In this paper a new method based on neural network has been developed for obtaining the solution of the Stokes problem. We transform the mixed Stokes problem into three independent Poisson problems which by solving them the solution of the Stokes problem is obtained. The results obtained by this method, has been compared with the existing numerical method and with the exact solution of the problem. It can be observed that the current new approximation has higher accuracy. The number of model parameters required is less than conventional methods. The proposed new method is illustrated by an example. Keywords: Artificial Neural Networks, Stokes Problem, Poisson Equation, Partial Differential Equations 1. Introduction CFD stands for Computational Fluid Dynamics, a sub- genre of fluid mechanics that uses computers (numerical methods and algorithms) to represent, or model, prob- lems that engage fluid flows. CFD software is usually used to solve equations in a discretized way. The domain is transferred into a grid or mesh – a regular/irregular and 2D/3D surface of cells. After discretization, an equation solver runs to solve the equations of fluid motion (Euler equations, Navier-Stokes equations, etc.). Algorithms from numerical linear algebra, like: Gauss-Seidel, suc- cessive over relaxation, Krylov subspace method or al- gorithms from Multigrid family are typically used. These methods involve millions of calculations, so, as it can be easily observed, computing is time consuming. Also in many problems, even with parallel programming and su- percomputers, only approximate solutions can be reached. There are various optimization methods of computer science which can be used for CFD. Simulated Anneal- ing, Genetic Algorithms, Evolution Strategy, Feed-For- ward Neural Networks are popular and we reimplemented in many projects. In [1] a framework is created for evolutionary optimi- zation which is then tested on aerodynamic design ex- ample. The framework was based on covariance matrix adaptation, with the feed-forward neural network as an approximate fitness function. An aerodynamic design procedure which combines neural networks with poly- nomial fits is introduced in [2] and [3] discussed an arti- ficial neural network which is an approximate model that is used for optimization of the blade geometry by simu- lated annealing method. Parallel stochastic search algo- rithm is introduced in [4] and tested on defining a shape of two airfoils. In this work, a performance neural net- work for solving Stokes equations is presented. Lagaris, et al. [5] used artificial neural networks (ANN) for solving ordinary differential equations and partial differential equations for both boundary value and initial value problems. Canh and Cong [6] presented a new technique for numerical calculation of viscoelastic flow based on the combination of neural networks and Brownian dynamics simulation or stochastic simulation technique (SST). Hayati and Karami [7] used a modified neural network to solve the Berger’s equation in one-dimen- sional quasilinear partial differential equation. The Stokes equations describe the motion of a fluid in (23) n Rn or. These equations are to be solved for an unknown velocity vector 1 (, )((, ))n iin uxyu xyR and pressure (, )pxy R . We restrict our attention here to incompressible fluids filling all of n R (n = 2) as follow: 2 11 22 12 0 p ufinR x p ufin y uu in xy (1)  M. BAYMANI ET AL. Copyright © 2010 SciRes. AM 289 with boundary conditions: 00 0 121 2 (, ) (,),onuuu uuu . Here, 0 u is given, C divergence-free vector field on , 12 , f f are the components of a given, externally applied force ( e.g. gravity). The first and second equa- tions of (1) are just Newton’s law f ma for fluid element subject to the external force 12 (, ) f ff and to the forces arising from pressure and friction. The third equation of (1) says that the fluid is incompressible. For physically reasonable solutions, we want to make sure 12 (, )uuu does not grow as (,)xy . Hence we will restrict our attention to the force f and initial con- dition 0 u that satisfy 0() 1 K xK ux Cx , onn R, for any and some K, () 1 K xK fx Cx , onn R, for any and some K. We accept a solution of (1) as physically reasonable only if it satisfies,() n pu CR and ()ux dxC (bounded energy). 2. Description of the Method The usual proposed approach for problem (1) will be illustrated in terms of the following general partial dif- ferential equation: 2 11 1 2 22 2 12 3 ,,,0, ,,,0, ,,0, Gx xxxxD x Gx xxxxD x GxxxxD xy (2) subject to certain boundary conditions (BC’s) (for exam- ple Dirichlet and/or Neumann), where 1 ( ,...,), nn n x xxRDR denotes the definition do- main and 12 (), (),() x xx are the solutions to be computed. If 112 23 (,), (,), (,) ttt x PxPxP denote trial solu- tions with adjustable parameters 123 ,,PPP, the problem (2) is transformed to 123 222 123 ,, min i iii PPPxD Gx Gx Gx (3) subject to the constraints imposed by the BC’s. In the proposed approach, the trial solutions 11 (, ), t x P 22 3 (,), (,) tt x PxP employ a feed forward neural net- work and parameters 123 ,,PPP correspond to the weights and biases of the neural architecture. We choose trial functions 11223 (,), (,), (,) ttt x PxPxP such that by construction satisfy the BC’s. This achieves by writing it as a sum of two terms 11111 22222 3333 ,, ,, ,, t t t xAxFxNxP x Ax FxNxP xAxFxNxP (4) where 1 (, )( ) H kii i NxPz and 1 n iijji j zwxu (1,2,3)k are single-outputs feed forward neural net- work with parameters 123 ,,PPP and n input units fed with the input vector x . The terms ()(1,2,3) i Ax i contain no adjustable parameters and satisfy the bound- ary conditions. The second terms (,(,))(1,2,3) iii FxNxP i is con- structed so as not to contribute to the BC’s, since 112 23 (,), (,), (,) ttt x PxPxP must also satisfy the BC’s. These terms employ a neural network whose weights and biases are to be adjusted in order to deal with the mini- mization problem. Note at this point that the problem has been reduced from the original constrained optimization problem to an unconstrained one (which is much easier to handle) due to the choice of the form of the trial solu- tion that satisfies by construction the BC’s. In the next section we present a systematic way to construct the trial solution, i.e., the functional forms of both Ai and Fi. We treat several common cases that one frequently encoun- ters in various scientific fields. As indicated by our ex- periments, the approach based on the above formulation is very effective and provides in reasonable computing time accurate solutions with impressive generalization (interpolation) properties. 3. Neural Network for Solvi n g S t o k e s Equations To solve problem (1) with [0,1] [0,1] , we apply the operators x and y on the first and second equa- tions respectively. Then we obtain: 22 12 12 22 () () x y uu pp f f xy xy (5) Using the third equation in (1), the Equation (5) may be written as: 22 12 22 () () x y pp f f xy (6) this is the Poisson equation, and has infinitely many so- lutions. By imposing some boundary conditions, we are going to obtain an appropriate solution for Equation (6)  M. BAYMANI ET AL. Copyright © 2010 SciRes. AM 290 by the neural network. The trial solution is written as ),,()1()1(),(),( PyxNyyxxyxAyxpt (7) where (, ) A xy is chosen so as to satisfy the BC, namely 01 000 111 (, )(1)()() (1)()[(1)(0)(1)] () [(1)(0)(1)]. Axyxhyxh y ygxxg xg ygxxg xg (8) where 010 ()(0,), ()(1,), ()(,0)hypy hypygxpx and 1() (,1) g xpx. Note that the second term of the trial solution does not affect the boundary conditions since it vanishes at the part of the boundary where Dirichlet BC’s are imposed. In the above PDE problems the error to be minimized is given by 2 22 22 (, )(, ) ()( ,) tiitii ii i pxy pxy EpFx y xy (9) where 12 ()( ) x y F ff and (, ) ii x y is a point in Ω. By solving the optimization problem (9), the weights ,, iiji vwu are obtained and then a trial solution for t p is obtained. By substituting the trial solution t p in the first equation of (1) we obtain: 11 () t p uf x (10) which is a Poisson equation for 1 u, by using (9) and by substituting 1t u and 1 () t p f x for or p and F , res- pectively, we can obtain a trial solution for 1t u. To ob- tain 2 u, we can substitute the trial solution t p in the second equation in (1) to obtain: 22 )( f y p ut . (11) In a similar manner we can obtain 2t u. 4. Numerical Examples In this section we present one example to illustrate the method. We used a multilayer perceptron having one hidden layer with five hidden units and one linear output unit. For a given input vector 12 (,) x xx the output of the network is 5 1 (, )( ) ii i NxP z where 2 1 iijji j zwxu and 1 () 1 x xe . The exact ana- lytic solution is known in advance. Therefore we test the accuracy of the obtained solution. Example. Consider the problem (1) with Ω = [0,1] × [0,1]. We choose 1 f and 2 f such that the exact solu- tion for 12 ,uu and p be as follows: 22 2 1 222 2 22 10(1) (132) 10(1) (132) 5( ). uxyx yy uyxyxx pxy The domain Ω is first discretized by uniform mesh of size 1/3h (4 points). This initial mesh is succes- sively refined to produce meshes with sizes 1/4h and 1/5h (respectively 9 and 16 points). Table 1 reports the maximum error at nodal points (Maximum error) at the training set points and the distances 2 t L pp and (1) tH pp between the exact solution and the training solution. In Figure 1 the error function t pp for N = 25 is depicted which shows the solution is very accurate. We used the Equation (10) and obtained the solution 1t u. Table 2 reports the maximum error at the training set points and the distances 11 2 t uu and (1) 11tH uu between the exact solution and the training solution. In a similar manner we obtained 2t u. Table 3 reports the maximum error at the training set points and the dis- Table 1. Maximum error at training set points and the dis- tances 2 t pp and 1 tH pp() . N = 16 N = 9 N = 4 1.8433e-75.1007e-4 0.0058 Maximum Error 4.1647e-157.5171e-8 1.0025e-5 2 t p p 4.9101e-137.5120e-6 4.1569e-4 (1) tH pp Table 2. Maximum error at training set points and the dis- tances 11 2 t uu and () 1 11tH uu . N = 25 N = 16 N = 9 1.733e-8 2.0723e-8 0.0372 Maximum error 2.576e-17 4.487e-17 4.091e-4 11 2 t uu 1.632e-15 6.4928e-15 0.040 11 (1) tH uu Table 3. Maximum error at training set points and the dis- tances 22 2 t uu and () 1 22tH uu . N = 25 N = 16 N = 9 2.6507e-072.6141e-05 0.0379 Maximum error 1.3238e-141.2722e-010 4.0684e-04 22 2 t uu 2.7010e-121.8825e-008 0.0407 (1) 22tH uu 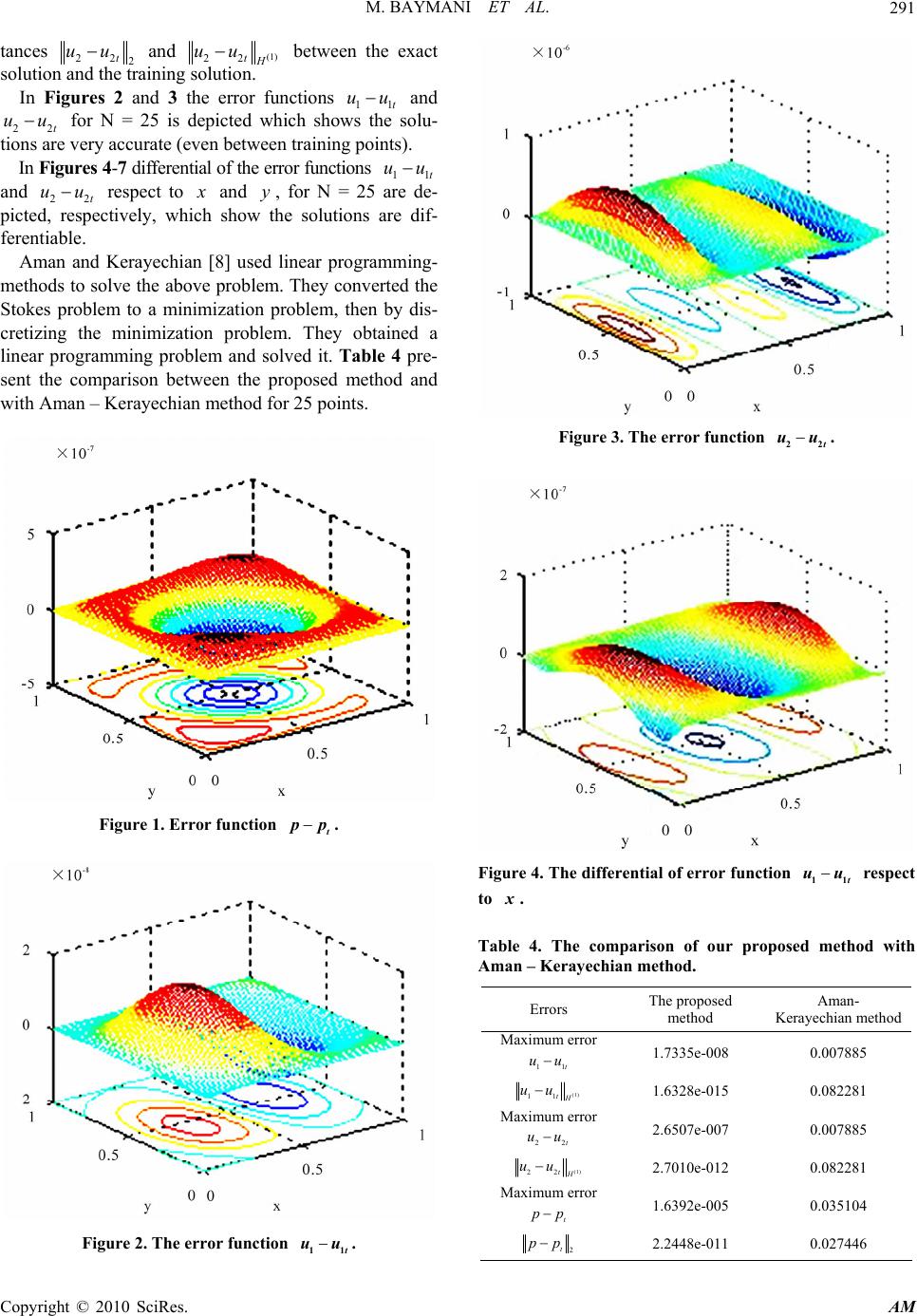 M. BAYMANI ET AL. Copyright © 2010 SciRes. AM 291 tances 22 2 t uu and (1) 22tH uu between the exact solution and the training solution. In Figures 2 and 3 the error functions 11t uu and 22t uu for N = 25 is depicted which shows the solu- tions are very accurate (even between training points). In Figures 4-7 differential of the error functions 11t uu and 22t uu respect to x and y, for N = 25 are de- picted, respectively, which show the solutions are dif- ferentiable. Aman and Kerayechian [8] used linear programming- methods to solve the above problem. They converted the Stokes problem to a minimization problem, then by dis- cretizing the minimization problem. They obtained a linear programming problem and solved it. Table 4 pre- sent the comparison between the proposed method and with Aman – Kerayechian method for 25 points. Figure 1. Error function t pp. Figure 2. The error function 11t uu. Figure 3. The error function 22t uu. Figure 4. The differential of error function 11t uu respect to x. Table 4. The comparison of our proposed method with Aman – Kerayechian method. Errors The proposed method Aman- Kerayechian method Maximum error 11t uu 1.7335e-008 0.007885 (1) 11tH uu 1.6328e-015 0.082281 Maximum error 22t uu 2.6507e-007 0.007885 (1) 22tH uu 2.7010e-012 0.082281 Maximum error t p p 1.6392e-005 0.035104 2 t p p 2.2448e-011 0.027446 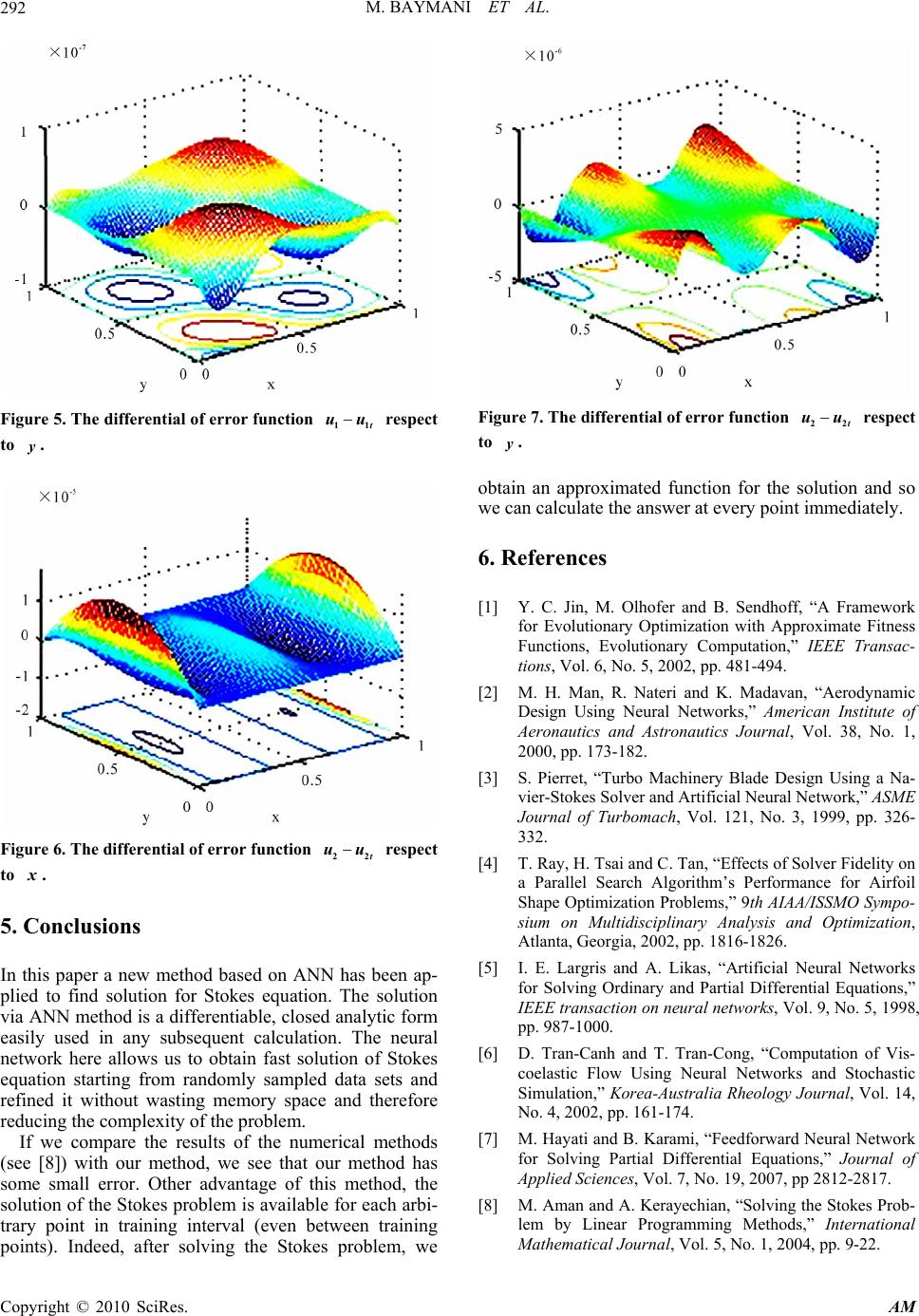 M. BAYMANI ET AL. Copyright © 2010 SciRes. AM 292 Figure 5. The differential of error function 11t uu respect to y. Figure 6. The differential of error function 22t uu respect to x. 5. Conclusions In this paper a new method based on ANN has been ap- plied to find solution for Stokes equation. The solution via ANN method is a differentiable, closed analytic form easily used in any subsequent calculation. The neural network here allows us to obtain fast solution of Stokes equation starting from randomly sampled data sets and refined it without wasting memory space and therefore reducing the complexity of the problem. If we compare the results of the numerical methods (see [8]) with our method, we see that our method has some small error. Other advantage of this method, the solution of the Stokes problem is available for each arbi- trary point in training interval (even between training points). Indeed, after solving the Stokes problem, we Figure 7. The differential of error function 22t uu respect to y. obtain an approximated function for the solution and so we can calculate the answer at every point immediately. 6. References [1] Y. C. Jin, M. Olhofer and B. Sendhoff, “A Framework for Evolutionary Optimization with Approximate Fitness Functions, Evolutionary Computation,” IEEE Transac- tions, Vol. 6, No. 5, 2002, pp. 481-494. [2] M. H. Man, R. Nateri and K. Madavan, “Aerodynamic Design Using Neural Networks,” American Institute of Aeronautics and Astronautics Journal, Vol. 38, No. 1, 2000, pp. 173-182. [3] S. Pierret, “Turbo Machinery Blade Design Using a Na- vier-Stokes Solver and Artificial Neural Network,” ASME Journal of Turbomach, Vol. 121, No. 3, 1999, pp. 326- 332. [4] T. Ray, H. Tsai and C. Tan, “Effects of Solver Fidelity on a Parallel Search Algorithm’s Performance for Airfoil Shape Optimization Problems,” 9th AIAA/ISSMO Sympo- sium on Multidisciplinary Analysis and Optimization, Atlanta, Georgia, 2002, pp. 1816-1826. [5] I. E. Largris and A. Likas, “Artificial Neural Networks for Solving Ordinary and Partial Differential Equations,” IEEE transaction on neural networks, Vol. 9, No. 5, 1998, pp. 987-1000. [6] D. Tran-Canh and T. Tran-Cong, “Computation of Vis- coelastic Flow Using Neural Networks and Stochastic Simulation,” Korea-Australia Rheology Journal, Vol. 14, No. 4, 2002, pp. 161-174. [7] M. Hayati and B. Karami, “Feedforward Neural Network for Solving Partial Differential Equations,” Journal of Applied Sciences, Vol. 7, No. 19, 2007, pp 2812-2817. [8] M. Aman and A. Kerayechian, “Solving the Stokes Prob- lem by Linear Programming Methods,” International Mathematical Journal , Vol. 5, No. 1, 2004, pp. 9-22. |