I. K. DONTWI ET AL. 295
named in honour of Arthur Cayley, states that every
group G is isomorphic to a subgroup of the symmetric
group acting on G in [28]. In fact this can be explained as
an instance of the group action of G on the elements of G.
A permutation of a set G is any objective function taking
G onto G; and the set of all such functions forms a group
under function composition, called the symmetric group
on G, and this denoted by Sym(G).
Cayley’s theorem outlines all groups on the same ped-
estal, by taking into account any group which might be
made up of infinite groups such as (R,+) as a permutation
group of some underlying set. This establishes the fact
that theorems which holds for permutation groups are
counted to hold for groups in general.
The group being used here satisfies the axioms for
topological group. In topological dynamics it involves
topological groups and their operations [2,27].
6. Using Matlab to Compute the Results
above Instead of Manual Approach
Algorithm
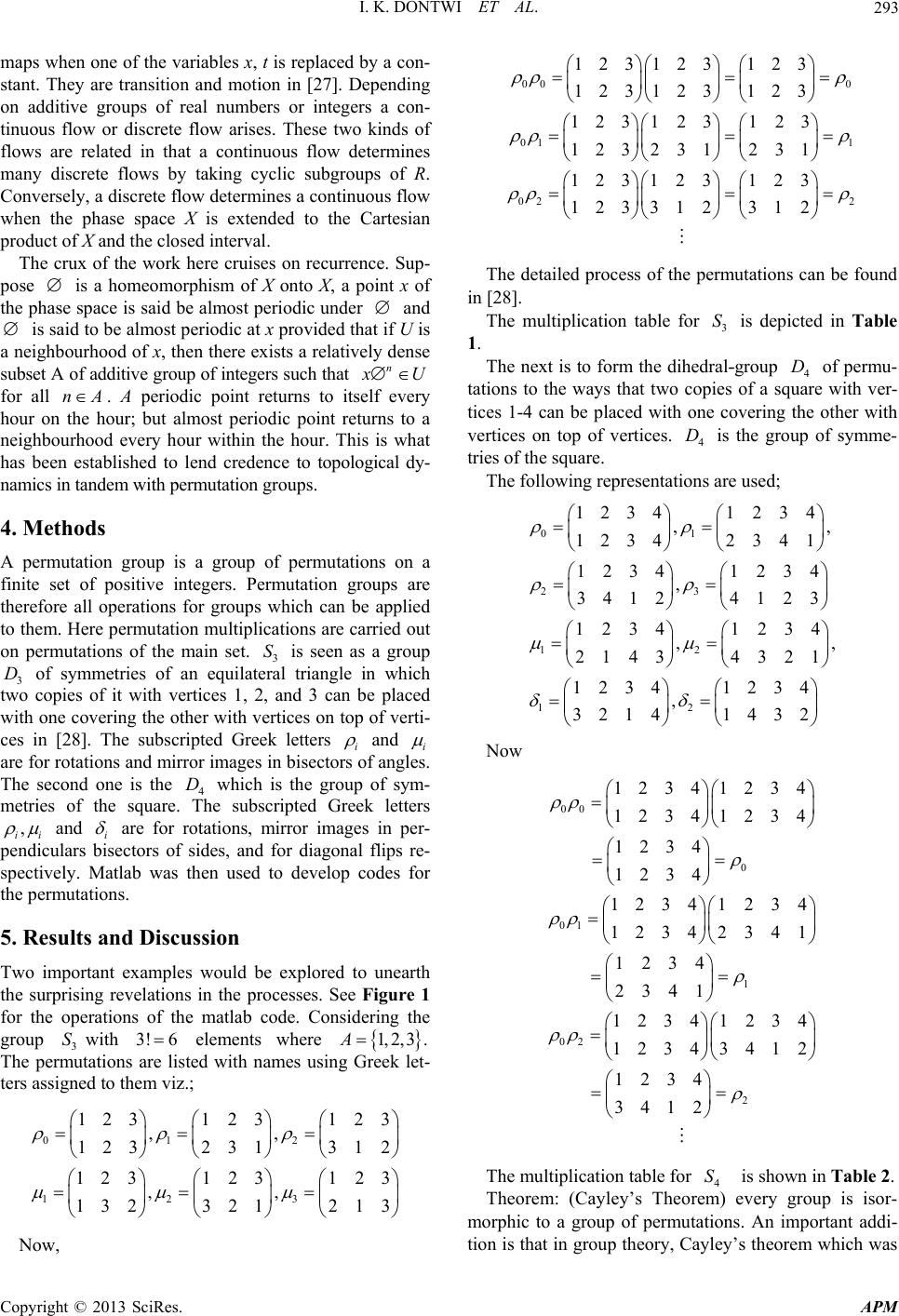
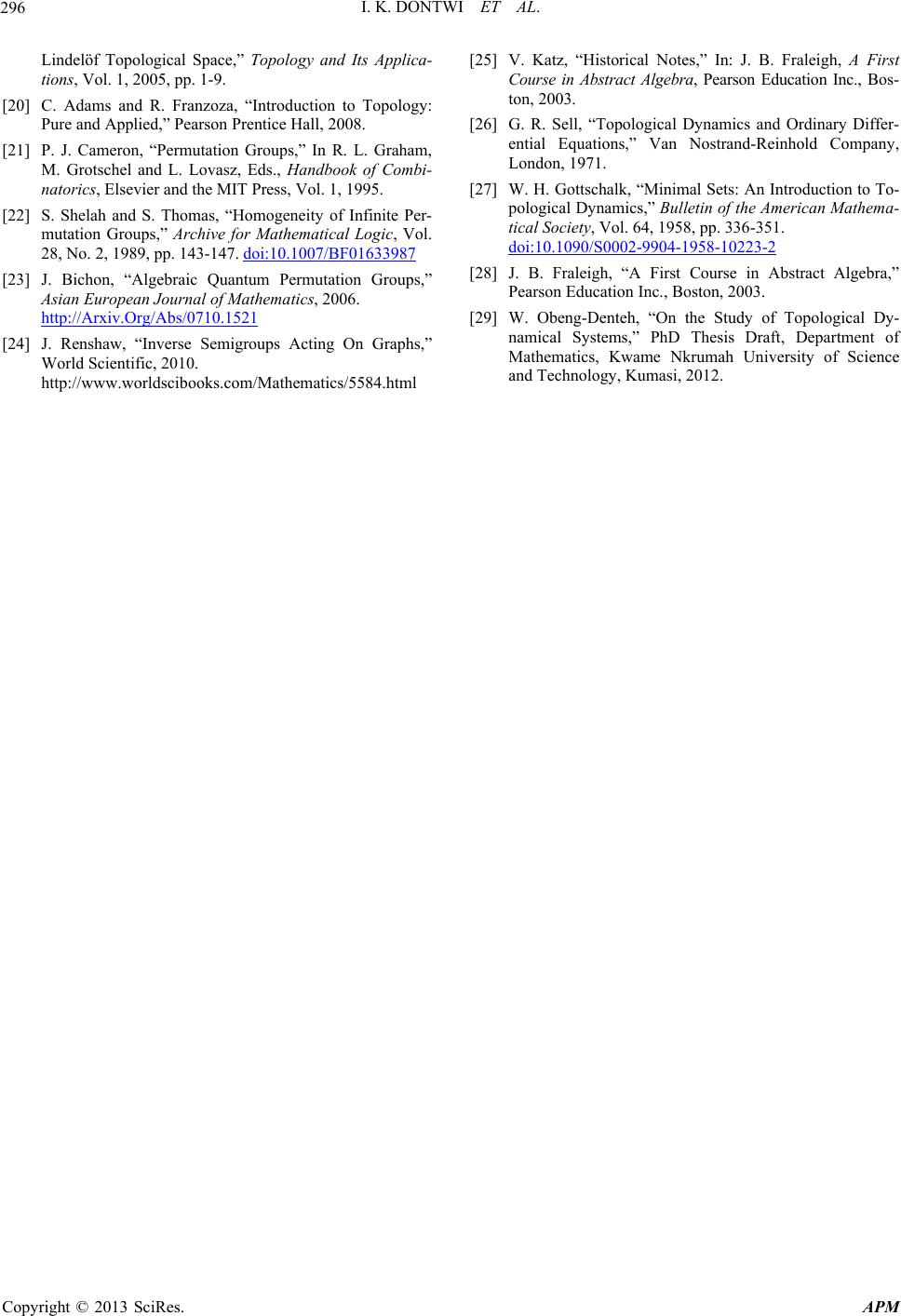
In general this work has been trying to establish a link
between topological dynamics and permutation groups
which has been likened to Cartesian product. Matlab has
been used to generate the permutations explained above.
See Figure 1 for an example of the usage of the matlab
code. The code could be extended to cover Sn.
7. Conclusions
The crux of the work here cruised on recurrence in [29].
A periodic point returns to itself every hour on the hour;
but almost periodic point returns to a neighbourhood
every hour within the hour. The recurrence was depicted
in the permutations that were done. All the parameters in
the form of the Greek symbols recurred in the table pro-
vided. When this trend is continued for all time the re-
currence nature would be mimicked along the same trend.
This is what has been established to lend credence to
topological dynamics in tandem with permutation groups.
It is worthy to note that from all the tables each col-
umn gives a permutation of the group set. It is obvious
that at least every finite group is isomorphic to a sub-
group of the group. Isomorphism is about one-to-one
correspondence satisfying a particular relation. This is
the way topological dynamics apply permutation in find-
ing the symmetries of objects and their rotations as well
and matlab has been useful over here.
REFERENCES
[1] E. Glasner and B. Weiss, “On the Interplay between
Measurable and Topological Dynamics,” Most, Vol. 1,
2004, pp. 1-47.
[2] A. Katok and B. Hasselblatt, “Introduction to the Modern
Theory of Dynamical Systems,” October, Cambridge
University Press, Cambridge, Vol. 54, 1995, pp. 519-522.
doi:10.1017/CBO9780511809187.018
[3] J. P. Boon and O. Decroly, “Dynamical Systems Theory
for Music Dynamics,” Chaos, Vol. 5, No. 3, 1994, pp.
501-508. doi:10.1063/1.166145
[4] E. Ball, “Qualitative Research,” Palgrave Macmillan,
London, Vol. 5, 2011, pp. 285-306.
[5] N. Kruse, “Global Asymptotic Stability in Some Discrete
Dynamical Systems,” Journal of Mathematical Analysis
and Applications, Vol. 235, No. 1, 1999, pp. 151-158.
doi:10.1006/jmaa.1999.6384
[6] N. Chernov, “On Some Statistical Properties of Dynami-
cal Systems,” Proceedings of the 4th Berkeley Symposium
on Mathematical Statistics and Probability, Vol. 3, 2008,
pp. 315-320.
[7] R. Markarian, “Statistical Properties of Dynamical Sys-
tems with Singularities,” Journal of Statistical Physics,
Vol. 80, No. 5-6, 1995, pp. 1207-1239.
doi:10.1007/BF02179869
[8] W. Mitkowski, “Scaling Properties of Discrete Dynamical
Systems,” Bulletin of the Polish Academy of Sciences
Technical Sciences, Vol. 56, No. 4, 2008.
[9] R. A. Johnson, K. J. Palmerand and G. R. Sell, “Ergodic
Properties of Linear Dynamical Systems,” SIAM Journal
on Mathematical Analysis, Vol. 18, No. 2, 1987, pp. 191-
202. doi:10.1137/0518001
[10] J. M. Møller, “General Topology,” Topology, 2009, pp.
1-70.
[11] B. Audoly, “Asymptotic Study of the Interfacial Crack
with Friction,” Journal of the Mechanics and Physics of
Solids, Vol. 48, No. 9, 2000, pp. 1851-1864.
doi:10.1016/S0022-5096(99)00098-8
[12] K. Hellan, “An Asymptotic Study of Slow Radial Crack-
ing,” International Journal of Fracture, Vol. 26, No. 1,
1984, pp. 17-30. doi:10.1007/BF01152309
[13] C. Song, H. Gao and X. W. Zheng, “A Study of Asymp-
totic Stability for Delayed Recurrent Neural Networks,”
IEEE International Symposium on Circuits and Systems,
Taipei, 24-27 May 2009, pp. 2125-2128.
[14] L. Beiraodaveiga, “Asymptotic Study of the Solution for
Pinched Cylindrical Shells,” Computer Methods in Ap-
plied Mechanics and Engineering, Vol. 194, No. 9-11,
2005, pp. 1113-1139. doi:10.1016/j.cma.2004.06.015
[15] J. L. Kelley, “General Topology,”Van Nostrand, Prince-
ton, 1955.
[16] C. Othmer, “A Continuous Adjoint Formulation for the
Computation of Topological and Surface Sensitivities of
Ducted Flows,” Topology, Vol. 58, 2008, pp. 861-877.
[17] D. G. Davis, “Continuous Action,” Journal of Pure and
Applied Algebra, Vol. 206, 2006, pp. 322-354.
doi:10.1016/j.jpaa.2005.06.022
[18] D. Repovs and L. Zdomskyy, “A New Lindelof Topo-
logical Group,” Topology and Its Applications, Vol. 157,
No. 5, 2010, pp. 1-8.
[19] O. Pavlov, “A First Countable Linearly Lindelöf Not
Copyright © 2013 SciRes. APM