Paper Menu >>
Journal Menu >>
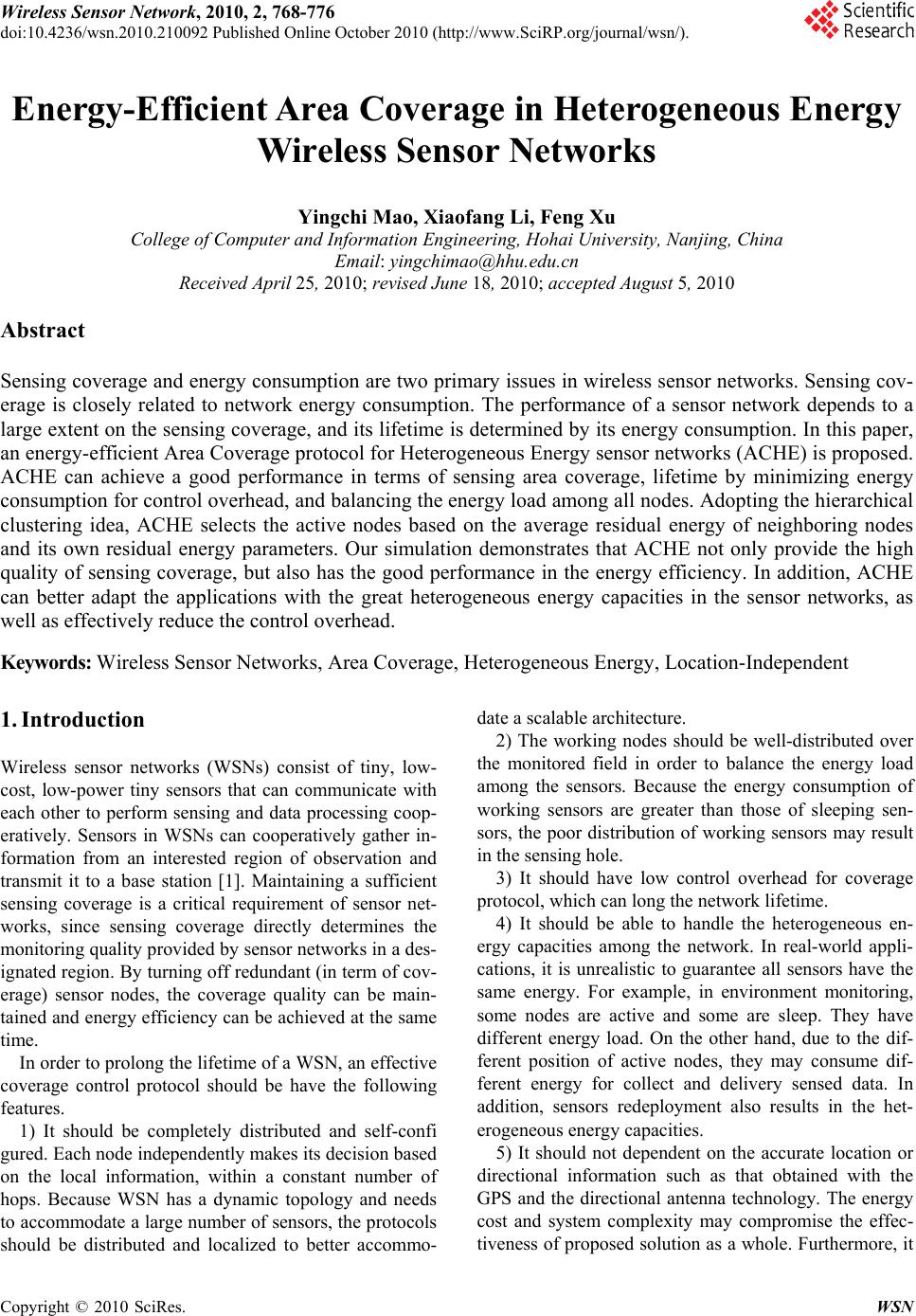 Wireless Sensor Network, 2010, 2, 768-776 doi:10.4236/wsn.2010.210092 October 2010 (http://www.SciRP.org/journal/wsn/). Copyright © 2010 SciRes. WSN Published Online Energy-Efficient Area Coverage in Heterogeneous Energy Wireless Sensor Networks Yingchi Mao, Xiaofang Li, Feng Xu College of Computer and Information Engineering, Hohai University, Nanjing, China Email: yingchimao@hhu.edu.cn Received April 25, 2010; revised June 18, 2010; accepted August 5, 2010 Abstract Sensing coverage and energy consumption are two primary issues in wireless sensor networks. Sensing cov- erage is closely related to network energy consumption. The performance of a sensor network depends to a large extent on the sensing coverage, and its lifetime is determined by its energy consumption. In this paper, an energy-efficient Area Coverage protocol for Heterogeneous Energy sensor networks (ACHE) is proposed. ACHE can achieve a good performance in terms of sensing area coverage, lifetime by minimizing energy consumption for control overhead, and balancing the energy load among all nodes. Adopting the hierarchical clustering idea, ACHE selects the active nodes based on the average residual energy of neighboring nodes and its own residual energy parameters. Our simulation demonstrates that ACHE not only provide the high quality of sensing coverage, but also has the good performance in the energy efficiency. In addition, ACHE can better adapt the applications with the great heterogeneous energy capacities in the sensor networks, as well as effectively reduce the control overhead. Keywords: Wireless Sensor Networks, Area Coverage, Heterogeneous Energy, Location-Independent 1. Introduction Wireless sensor networks (WSNs) consist of tiny, low- cost, low-power tiny sensors that can communicate with each other to perform sensing and data processing coop- eratively. Sensors in WSNs can cooperatively gather in- formation from an interested region of observation and transmit it to a base station [1]. Maintaining a sufficient sensing coverage is a critical requirement of sensor net- works, since sensing coverage directly determines the monitoring quality provided by sensor networks in a des- ignated region. By turning off redundant (in term of cov- erage) sensor nodes, the coverage quality can be main- tained and energy efficiency can be achieved at the same time. In order to prolong the lifetime of a WSN, an effective coverage control protocol should be have the following features. 1) It should be completely distributed and self-confi gured. Each node independently makes its decision based on the local information, within a constant number of hops. Because WSN has a dynamic topology and needs to accommodate a large number of sensors, the protocols should be distributed and localized to better accommo- date a scalable architecture. 2) The working nodes should be well-distributed over the monitored field in order to balance the energy load among the sensors. Because the energy consumption of working sensors are greater than those of sleeping sen- sors, the poor distribution of working sensors may result in the sensing hole. 3) It should have low control overhead for coverage protocol, which can long the network lifetime. 4) It should be able to handle the heterogeneous en- ergy capacities among the network. In real-world appli- cations, it is unrealistic to guarantee all sensors have the same energy. For example, in environment monitoring, some nodes are active and some are sleep. They have different energy load. On the other hand, due to the dif- ferent position of active nodes, they may consume dif- ferent energy for collect and delivery sensed data. In addition, sensors redeployment also results in the het- erogeneous energy capacities. 5) It should not dependent on the accurate location or directional information such as that obtained with the GPS and the directional antenna technology. The energy cost and system complexity may compromise the effec- tiveness of proposed solution as a whole. Furthermore, it  Y. C. MAO ET AL.769 is still a very difficult problem to estimate sensors’ loca- tions, since GPS and other complicated hardware devices consume too much energy and the costs are too high for tiny sensors [2]. To meet the above requirements, an energy-efficient location-independent area coverage protocol for hetero- geneous energy sensor networks (ACHE) is proposed. Different from DELIC [3], adopting the hierarchical clu- stering idea, ACHE elects the working nodes based on the average residual energy of neighboring nodes and its own residual energy parameters. Simulation study dem- onstrates that ACHE can better adapt the application with the heterogeneous energy capacities and also effectively reduce the control overhead. The rest of the paper is organized as follows. In Sec- tion 2, we will give a brief summary of the related work. Section 3 describes the network model. Following that, we present in Section 4 the proposed coverage protocol ACHE. Section 5 will give the simulation and evaluation results. Section 6 is the conclusion remarks. 2. Related Work In [4] and [5], an approach is proposed to compute the maximal cover set. The sensor nodes in each cover set can perform independently the task of monitoring the desired area; sensor nodes in all the cover sets take turns at performing the monitoring task. The two algorithms proposed are both centralized ones, so they are not suit- able for the case in which there is a large quantity of sensors. In [6], Tian et al. propose a off-duty eligibility rule for complete sensing coverage, relying on the geographical information of sensor nodes and AOA (Arrival of Angle) obtained through the directional antenna, can reckon the coverage relation between one node and its neighbors and then select working nodes. The off-duty eligibility rule fails to consider the problem that excessive overlap may be formed so that the number of working nodes se- lected becomes very large to cause extra energy consum- ption. In [7], it is proved that to ensure that the full sensing area coverage of a convex area also guarantee the con- nectivity of the active nodes, the communication range should be at least twice of the sensing range. Based on the analytical results, Zhang et al. proposed a distributed, localized density control algorithm named OGDC [7]. Wang et al. draw the same conclusion in [8], and pre- sented a Coverage Configuration Protocol (CCP) that can provide complete coverage. Based on OGDC, Wu et al. proposed a coverage control protocol with adjustable sensing range [9]. Every working node adjusts the ap- propriate sensing range based on the relative position to the neighboring nodes in order to decrease the excessive overlap of sensing coverage. The above coverage protocols have to rely on the lo- cation information of sensor nodes in reckoning sensing coverage. The following protocols do not require the location information to solve the coverage problem. Kumar et al. adopt the Randomized Independent Sche- duling (RIS) mechanism [10]. At the beginning of each round, each sensor independently decides whether to be- come active with probability p or go to sleep with prob- ability 1-p, p determines the network lifetime. Obviously, RIS does not require location information and has no communication overhead. But RIS is not robust against unexpected failure before they run out of energy. Ye et al. proposed a probing-based density control al- gorithm named PEAS [11]. In PEAS, a sleeping node wakes up periodically to probe its neighbors and transits to working mode if there is no working node within its probing range. Obviously, in PEAS, some nodes may die too early and the energy consumption is unbalance, which will severely affect the coverage quality. Gao et al. propose a mathematical method, which does not rely on location information, to describe the redun- dancy [12]. According to this method, one sensor node can utilize the number of neighbors within its sensing range to calculate its own probability of becoming a re- dundant node. However, for most sensor nodes, the sen- sing hardware and the communicating hardware are two fully independent parts, and the communicating range is always not equal to the sensing range. Therefore, some specialized parts are needed to judge the number of neighbors within the sensing range. Mao et al. proposed a location-independent coverage protocol DELIC [3]. DELIC adopt the hierarchical clus- tering mechanism for working sensor election by com- paring its own residual energy to that of its neighboring nodes. However, DELIC require several iteration to de- termine final working sensors, which results the greater control overhead. Although the above protocols do not need the accurate location information of sensors, they also have some limi- tation. In addition, they could not discuss how to effec- tively deal with the heterogeneous energy capacities for coverage control. 3. Network Model Assume N sensor nodes are randomly and uniformly dis- tributed over the sensing field A. The sensor density is high enough that any point of A can be monitored by sensor nodes. We assume the following properties about the wireless sensor network: 1) The nodes in the network are stationary and they are left unattended after deployment. Copyright © 2010 SciRes. WSN  Y. C. MAO ET AL. Copyright © 2010 SciRes. WSN 770 2) For simplicity and convenience, the sensing mode is Boolean mode. 3) All nodes should be roughly time synchronized on the order of seconds. 4) All nodes have different initial energy and the bat- tery could not be rechargeable. 5) Nodes are location-unaware, i.e. not equipped with GPS-capable antennae. 6) Sensor’s radio transceiver is capable of changing its transmission power in continuous steps to achieve dif- ferent transmission ranges. Some sensors, such as the MICAZ mote, provide multiple levels of transmission power. The first three properties are typical assumptions in general wireless sensor networks. The forth property is more suitable for the real-world application compared with the same initial energy of all nodes. The fifth prop- erty assumes the nodes are location-unaware, which can decrease the hardware cost and energy consumption of sensors. From the point of view of energy efficiency, compared with the fix transmission power, the last prop- erty can improve the energy efficiency to prolong the net- work lifetime. 4. ACHE Protocol In a WSN, the working sensors should receive and de- livery the sensed data, which results in the higher energy consumption than that of sleeping sensors. In order to balance the energy load among the sensors in a WSN, ACHE protocol involves round-operation. Each round includes two phases: Decision phase and Sensing phase, denoted by DT and ST respectively. In DT, based on the hierarchical clustering idea, ACHE selects the working nodes. First, every node exchange the information with its neighbor nodes, then every node compete the working node based on the average residual energy of neighbor nodes and its own residual energy. After decision phase, the working sensors can collect and delivery sensed data to the base station, while other sensors enter into the sleeping state. 4.1. Adjust Appropriate Transmission Range In [13], we have given the theoretical analysis of the sensing area coverage property of minimal dominating set (MDS). Furthermore, we established the relationship between point coverage and area coverage in random geometric graphs. Suppose sensor nodes follow Poisson point process of density λ in the plane . According to (1), it can compute the appropriate transmission range Rt. 2 RtRs r 2 ((1) ) min( ,) Rs ln e Rs Rs (1) For 0 , any minimal dominating set of Gt (re- call that Gt is a subgraph of G induced by transmission range Rt) provides the same coverage as that of all sensor nodes with probability at least1 . On the other hand, Theorem 1 proves the set of working nodes elected by ACHE must be a dominating set in Subsection 4.3. Since MDS CDS, we have () () A rea MDSArea DS . By (1), every node can adjust the appropriate transmission range Rt, according to the local density λ, ACHE guarantee that the working nodes can provide the high quality of sensing coverage. With the execution of the sensor network, sensor nodes are prone to fail, the value of λ is changing. For a single node, it is very difficult to know the change of λ. Therefore, each node determines a local node density λlocal by counting the number of nodes in its k-hop neigh- bors using the maximum transmission range. The local node density λlocal can be approximated as the net- work density λ and can be adapt to variations of node density. The local node density λlocal can be computed as follows: maxRt max 22 1 () local c Rt k (2) where |c| is the number of k-hop neighbors. The larger the value of k is, the more accurate the approximation of λlocal is. However, the increase of the number of messages will results in the more energy consumption. ACHE es- timates the local density λlocal by counting the number of nodes in its 1-hop neighbor nodes usingma x R t. Let . Clearly, . Comb- ing the (1) and (2), we have 2 0(1 )Rs e 00, 1 0 0 ln min( ,) min( ,) ||1 local Rt RsRs ln RsRs c (3) Therefore, each sensor node can adjust the appropriate the transmission range Rt by (3). The obtained sensing coverage ratio has the probability at least1 . 4.2. Working Nodes Selection Definition 1: Neighborhood. For any node Si, the neighborhood node Sj of node Si is defined as {( ,),} jij SdSSRtji , where denotes the distance between node S i and node Sj, Rt denotes the transmission range computed by (3). (, ) ij dS S In order to effectively deal with the heterogeneous en- ergy capacities in sensor networks, it is obvious that the  Y. C. MAO ET AL.771 higher energy the node has, the higher probability it be- comes working nodes. Meanwhile, the lower average energy of its neighborhood nodes, the higher probability it becomes working nodes. Thus, ACHE elects the work- ing nodes considering the parameters, the average resid- ual energy of neighborhood nodes and the node own re- sidual energy. In ACHE, every node requires to maintain a neighbor- hood table Neighbor_Table, recording the neighbors’ ID, neighbors’ state, and neighbors’ residual energy. At the beginning of each round, every node first broadcasts an Energy_Msg message with the transmission range Rt to its neighboring nodes. The Energy_Msg message in- cludes ID of the sender node, state and its residual en- ergy. Once receiving the Energy_Msg from its neighbor- ring nodes, the node should update its own Neighbor_ Table. After updating its Neighbor_Table, every node Si can compute the average residual energy of its neigh- borring nodes, Si.Eavg. Let 1 . .,( m jresidual j iavg SE SEi N m 1) (4) where m is the number of neighboring nodes of Si, Sj.Eresidual (1 ≤ j ≤ m, j ≠ i) denotes the residual energy of node Sj. According to (4) and (5), we can obtain the time i when the node Si broadcasts an Active_Msg message to announce node Si would be a working node. An Ac- tive_Msg message consists of ID of the sender node, and its state ACTIVE. t .,(1 ) . iavg i iresidual SE tkT iN SE (5) where k is a random uniformly distributed in [0.9, 1.0]; T is the time length for selecting working nodes in each round, that is T = DT; Si.Eresidual denotes the residual en- ergy of node Si. From (5), it can notice that ACHE protocol uses as the main parameter for selecting working nodes. That is to say, the time when the node Si broadcasts an Active_Msg message is mainly deter- mined by. Compared with DELIC protocol, which is only based on its own residual energy of node to compete the working node, ACHE can better handle the heterogeneous energy capacities among the sensor nodes. ./. iavg ires idual SE SE ./ iavg SE i t . iresidual SE During the phase of selection working nodes, any node Si checks whether it receives any Active_Msg from its neighboring nodes before the timeiexpires. If node Si gets the Active_Msg from neighbor node Sj before the time i texpires, node Si would lose the chance to become the working node, and enter into the SLEEP state. That is to say, node Si is in the sensing coverage of the neighbor node Sj. If node Si does not receive any Active_Msg from its neighboring nodes when the timeiexpires, which means there is no neighbor node can cover the sensing area of node Si, node Si broadcasts an Active_Msg to its neighboring nodes, and becomes a working node and changes its state to ACTIVE. However, if another neighbor node Sk also broadcasts an Active_Msg message between the time interval, there maybe have several working nodes within each other’s trans- mission range Rt. t t t(, ii ttt ) t is the time interval than all neighboring nodes can receive Active_Msg message from node Si in the worst case. Due to the short package and limited broadcast range of Active_Msg message, t is quite small. Thus, the probability that several nodes within the transmission range Rt are working nodes is small. Theorem 3 would prove the result in Subsection 4.3. From the above description for ACHE, it is clearly found that there are only working nodes could broadcast Active_Msg message, and every working node only broadcast one Active_Msg message during the phase of selecting working nodes, which can greatly reduce the control overhead. 4.3. Protocol Analysis ACHE is a completely distributed, self-configured sens- ing coverage protocol. Node decisions are based solely on local information. This section provides the theoreti- cal analysis of ACHE for a better understanding. Theorem 1: The set of working sensor nodes obtained by ACHE forms a dominating set. That is to say, for any sensor node v in the deployed sensor set N, node v is ei- ther in the set of working sensor nodes or one of node v’s neighbor nodes is in the set of working sensor nodes. Proof: Randomly select a sensor node v in the de- ployed sensor set N. If v is a working sensor node, Theo- rem 1 holds. For the remaining case, we will show that there exists a working neighboring sensor node of v. Since v is not a working node, there exists at least one working node u in the neighboring nodes of v. Moreover, the time tu when node u broadcasts Ac- tive_Msg message is earlier than that of node v. In an- other words, before the time tv expires, v has received an Active_Msg from u, and entered into the SLEEP state. Otherwise, once the time tv expires, v has not received any Active_Msg from its neighboring nodes, becomes a working node, and broadcasts an Active_Msg to it neighborhood. Clearly, for any sensor node v in the deployed sensor set N, node v is either in the set of working sensor nodes or one of node v’s neighbor nodes is in the set of work- Copyright © 2010 SciRes. WSN  Y. C. MAO ET AL. Copyright © 2010 SciRes. WSN 772 ing sensor nodes. Theorem 2: 0 , the set of working sensor nodes obtained by ACHE can provide the complete sensing coverage with probability at least 1 . Proof: In [13], we have proved that for0 , any minimal dominating set of Gt (Gt is a subgraph of G in- duced by transmission range Rt based on (3)) provides the same coverage as that of all sensor nodes with prob- ability at least1 . In the network model, it assumes that the sensor den- sity is high enough that any point of A can be monitored by sensor nodes. Since MDS CDS, we have () () A rea MDSArea DS. According Theorem 1, the set of working sensor nodes obtained by ACHE forms a dominating set. Therefore,0 , the set of working sensor nodes obtained by ACHE can provide the com- plete sensing coverage with probability at least1 . Theorem 3: In each round, the probability that several working nodes within one transmission range Rt is small, i.e., working sensor nodes are well-distributed. Proof: In ACHE protocol, every node must compete for working node with its neighboring node. Assume that after one node v broadcasts an Active_Msg message within its transmission range Rt, it can guarantee that all neighboring nodes can receive Active_Msg message from node v in the intervalt . Obviously, if no other neighboring nodes of node v broadcast Active_Msg message in the interval, node v becomes the only one working node within its transmission range Rt. On the other hand, if other neighboring nodes broadcast Ac- tive_Msg in the interval , there maybe exist several working nodes within one transmission range Rt. Con- sider the probability that several working nodes within one transmission range Rt, denoted as p. t t According to (2), the time when any node broadcasts an Active_Msg message is approximately random uni- formly distributed in [0, T]. Therefore, the probability p could satisfy the Equation (6). 0 1 1(1) m m t pC T 1 (6) where m-1 is the expected value of the number of sensor nodes within the transmission range Rt. Clearly, 2 Rt m A N s . With typical values of other parameters, the probability p is very small. For example, Rt = 10 m, || A|| = (100 × 100) m2, N = 100, T = 10 s, , the resulting p = 0.00214. 10tm Therefore, the probability that several working nodes within one transmission range Rt is small. Theorem 4: ACHE has a worst case message ex- change complexity of per node and of in the network. (1)O()ON Proof: During the execution of ACHE, if node v re- ceived the Active_Msg messages from its neighbouring nodes before the time tv expires, node v enters into the SLEEP state and does not send any message. Otherwise, node v enters into the ACTIVE state and broadcasts an Active_Msg message. Since the number of these Ac- tive_Msg messages in the network is less than N, the number of messages exchanged in the network is up- per-bound by. ()ON 5. Simulation Study 5.1. Simulation Setup and Parameters To evaluate the performance of the ACHE protocol, we use GloMoSim [14] as the simulation platform in terms of evaluating the number of working nodes, coverage ratio, the network lifetime and control overhead. In the simulation, 600-1200 sensors are randomly deployed in a 100 × 100 (m2) region, and each sensor has a sensing range of 10 meters, the maximum transmission range of 20 meters. To demonstrate ACHE could better adapt with the heterogeneous energy capacities in the sensor networks than others, simulation setups three different degree for heterogeneous energy among the sensor nodes. The initial energy of sensor nodes in the network is ran- domly uniformly distributed in (0.2 J, 2.0 J), (1.0 J, 2.0 J), and (1.5 J, 2.0 J) respectively. To evaluate the perform- ance of energy efficiency, we use the same network pa- rameters and radio model as presented in [15]. In article [3], we have compared DELIC protocol with other coverage protocols. DELIC protocol outperforms the Sponsor area [6], OGDC, PEAS in term of coverage ratio, energy efficiency and balancing energy load. Thus, we only compare proposed ACHE with DELIC in our simulation experiment. 5.2. Effectiveness of ACHE Figure 1 and Figure 2 give the curves of the number of working nodes and sensing coverage ratio in the different deployed nodes density with the different degree of het- erogeneous energy capacities. As shown in Figure 1 and Figure 2, the number of working nodes obtained by ACHE is smaller about 15% than that of DELIC in the different nodes density. In the most situations, ACHE can provide above 99% sensing coverage for the differ- ent node density. But the quality of sensing coverage by ACHE is little poorer than that of DELIC. For the most application, the above 99% sensing coverage is accept- able and reasonable. In addition, as the same with DELIC, the number of working nodes by ACHE does not in- crease with the number of deployed nodes. This is be- cause the number of working nodes in ACHE is related 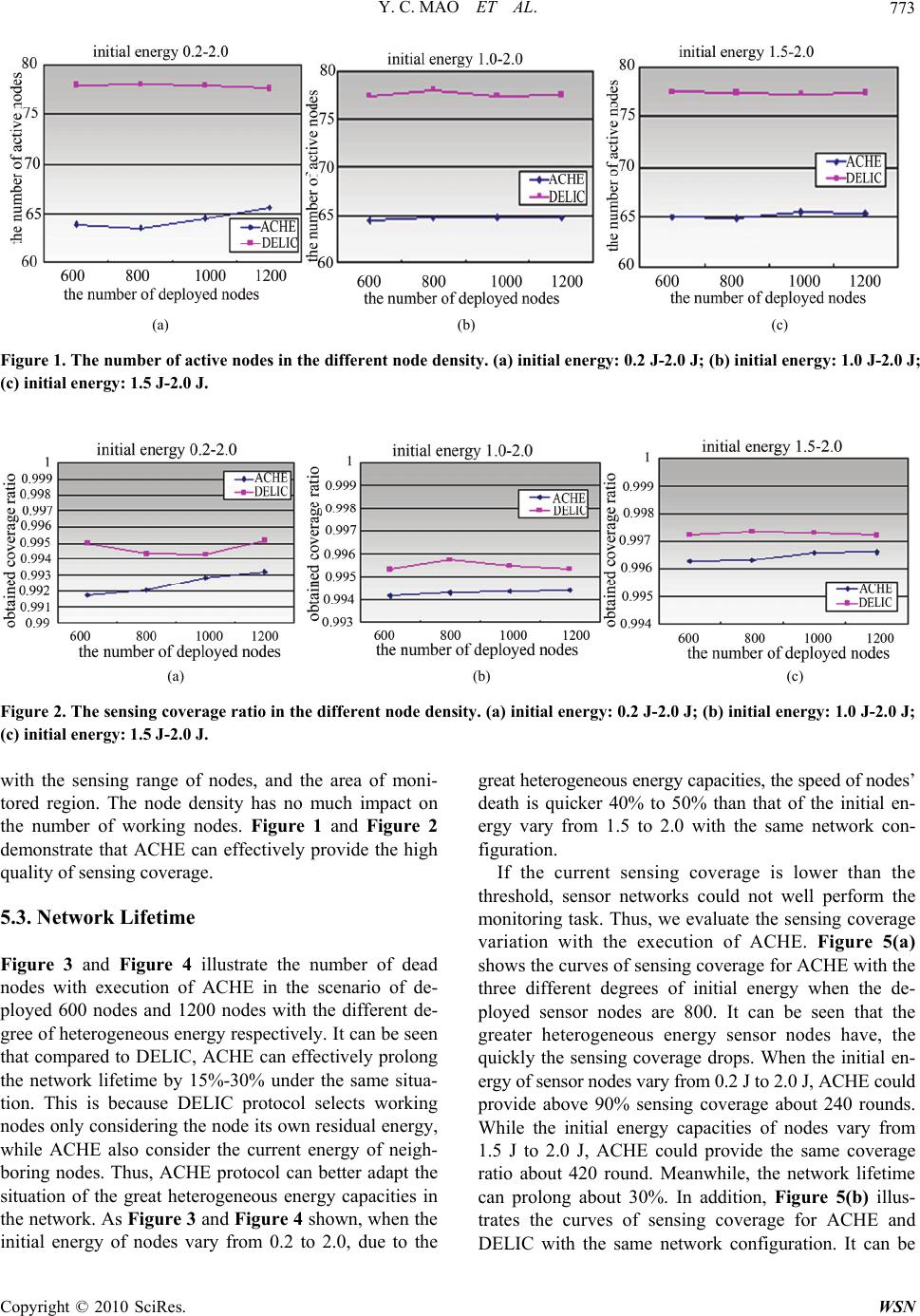 Y. C. MAO ET AL. 773 (a) (b) (c) Figure 1. The number of active nodes in the different node density. (a) initial energy: 0.2 J-2.0 J; (b) initial energy: 1.0 J-2.0 J; (c) initial energy: 1.5 J-2.0 J. (a) (b) (c) Figure 2. The sensing coverage ratio in the different node density. (a) initial energy: 0.2 J-2.0 J; (b) initial energy: 1.0 J-2.0 J; (c) initial energy: 1.5 J-2.0 J. with the sensing range of nodes, and the area of moni- tored region. The node density has no much impact on the number of working nodes. Figure 1 and Figure 2 demonstrate that ACHE can effectively provide the high quality of sensing coverage. 5.3. Network Lifetime Figure 3 and Figure 4 illustrate the number of dead nodes with execution of ACHE in the scenario of de- ployed 600 nodes and 1200 nodes with the different de- gree of heterogeneous energy respectively. It can be seen that compared to DELIC, ACHE can effectively prolong the network lifetime by 15%-30% under the same situa- tion. This is because DELIC protocol selects working nodes only considering the node its own residual energy, while ACHE also consider the current energy of neigh- boring nodes. Thus, ACHE protocol can better adapt the situation of the great heterogeneous energy capacities in the network. As Figure 3 and Figure 4 shown, when the initial energy of nodes vary from 0.2 to 2.0, due to the great heterogeneous energy capacities, the speed of nodes’ death is quicker 40% to 50% than that of the initial en- ergy vary from 1.5 to 2.0 with the same network con- figuration. If the current sensing coverage is lower than the threshold, sensor networks could not well perform the monitoring task. Thus, we evaluate the sensing coverage variation with the execution of ACHE. Figure 5(a) shows the curves of sensing coverage for ACHE with the three different degrees of initial energy when the de- ployed sensor nodes are 800. It can be seen that the greater heterogeneous energy sensor nodes have, the quickly the sensing coverage drops. When the initial en- ergy of sensor nodes vary from 0.2 J to 2.0 J, ACHE could provide above 90% sensing coverage about 240 rounds. While the initial energy capacities of nodes vary from 1.5 J to 2.0 J, ACHE could provide the same coverage ratio about 420 round. Meanwhile, the network lifetime can prolong about 30%. In addition, Figure 5(b) illus- trates the curves of sensing coverage for ACHE and DELIC with the same network configuration. It can be C opyright © 2010 SciRes. WSN 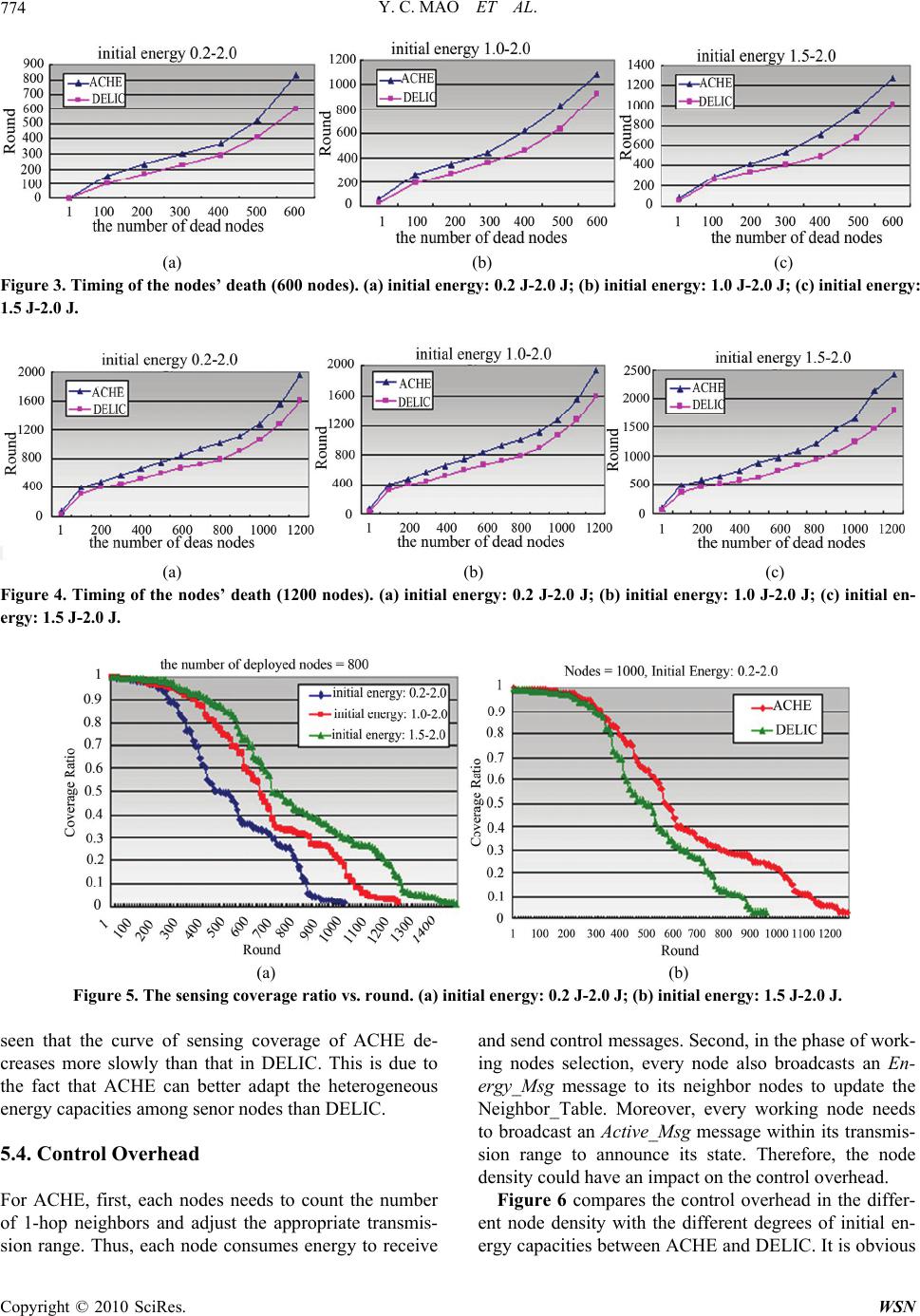 Y. C. MAO ET AL. 774 (a) (b) (c) Figure 3. Timing of the nodes’ death (600 nodes). (a) initial energy: 0.2 J-2.0 J; (b) initial energy: 1.0 J-2.0 J; (c) initial energy: 1.5 J-2.0 J. (a) (b) (c) Figure 4. Timing of the nodes’ death (1200 nodes). (a) initial energy: 0.2 J-2.0 J; (b) initial energy: 1.0 J-2.0 J; (c) initial en- ergy: 1.5 J-2.0 J. (a) (b) Figure 5. The sensing coverage ratio vs. round. (a) initial energy: 0.2 J-2.0 J; (b) initial energy: 1.5 J-2.0 J. seen that the curve of sensing coverage of ACHE de- creases more slowly than that in DELIC. This is due to the fact that ACHE can better adapt the heterogeneous energy capacities among senor nodes than DELIC. 5.4. Control Overhead For ACHE, first, each nodes needs to count the number of 1-hop neighbors and adjust the appropriate transmis- sion range. Thus, each node consumes energy to receive and send control messages. Second, in the phase of work- ing nodes selection, every node also broadcasts an En- ergy_Msg message to its neighbor nodes to update the Neighbor_Table. Moreover, every working node needs to broadcast an Active_Msg message within its transmis- sion range to announce its state. Therefore, the node density could have an impact on the control overhead. Figure 6 compares the control overhead in the differ- ent node density with the different degrees of initial en- ergy capacities between ACHE and DELIC. It is obvious C opyright © 2010 SciRes. WSN 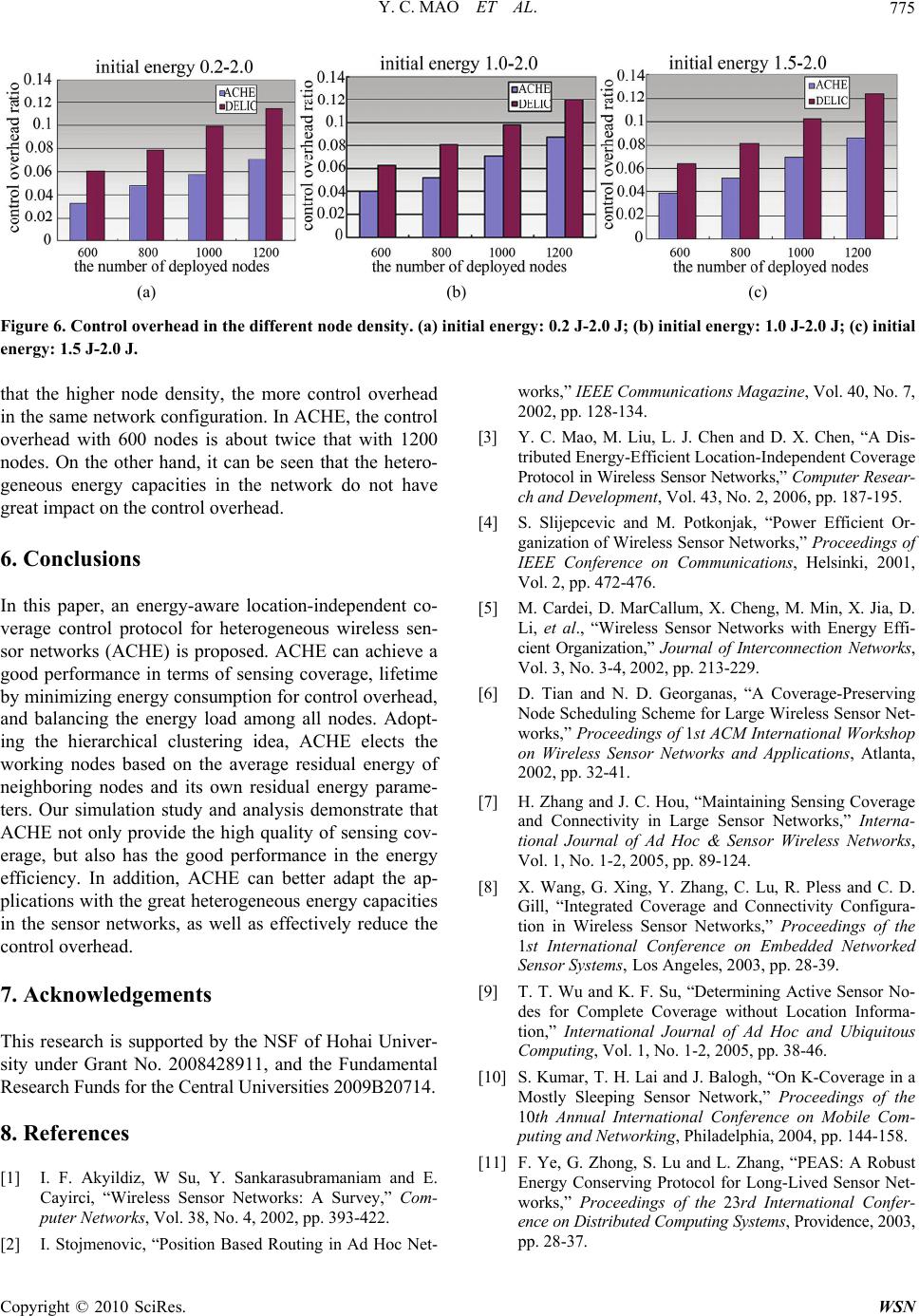 Y. C. MAO ET AL. 775 (a) (b) (c) Figure 6. Control overhead in the different node density. (a) initial energy: 0.2 J-2.0 J; (b) initial energy: 1.0 J-2.0 J; (c) initial energy: 1.5 J-2.0 J. that the higher node density, the more control overhead in the same network configuration. In ACHE, the control overhead with 600 nodes is about twice that with 1200 nodes. On the other hand, it can be seen that the hetero- geneous energy capacities in the network do not have great impact on the control overhead. 6. Conclusions In this paper, an energy-aware location-independent co- verage control protocol for heterogeneous wireless sen- sor networks (ACHE) is proposed. ACHE can achieve a good performance in terms of sensing coverage, lifetime by minimizing energy consumption for control overhead, and balancing the energy load among all nodes. Adopt- ing the hierarchical clustering idea, ACHE elects the working nodes based on the average residual energy of neighboring nodes and its own residual energy parame- ters. Our simulation study and analysis demonstrate that ACHE not only provide the high quality of sensing cov- erage, but also has the good performance in the energy efficiency. In addition, ACHE can better adapt the ap- plications with the great heterogeneous energy capacities in the sensor networks, as well as effectively reduce the control overhead. 7. Acknowledgements This research is supported by the NSF of Hohai Univer- sity under Grant No. 2008428911, and the Fundamental Research Funds for the Central Universities 2009B20714. 8 . References [1] I. F. Akyildiz, W Su, Y. Sankarasubramaniam and E. Cayirci, “Wireless Sensor Networks: A Survey,” Com- puter Networks, Vol. 38, No. 4, 2002, pp. 393-422. [2] I. Stojmenovic, “Position Based Routing in Ad Hoc Net- works,” IEEE Communications Magazine, Vol. 40, No. 7, 2002, pp. 128-134. [3] Y. C. Mao, M. Liu, L. J. Chen and D. X. Chen, “A Dis- tributed Energy-Efficient Location-Independent Coverage Protocol in Wireless Sensor Networks,” Computer Resear- ch and Development, Vol. 43, No. 2, 2006, pp. 187-195. [4] S. Slijepcevic and M. Potkonjak, “Power Efficient Or- ganization of Wireless Sensor Networks,” Proceedings of IEEE Conference on Communications, Helsinki, 2001, Vol. 2, pp. 472-476. [5] M. Cardei, D. MarCallum, X. Cheng, M. Min, X. Jia, D. Li, et al., “Wireless Sensor Networks with Energy Effi- cient Organization,” Journal of Interconnection Networks, Vol. 3, No. 3-4, 2002, pp. 213-229. [6] D. Tian and N. D. Georganas, “A Coverage-Preserving Node Scheduling Scheme for Large Wireless Sensor Net- works,” Proceedings of 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, 2002, pp. 32-41. [7] H. Zhang and J. C. Hou, “Maintaining Sensing Coverage and Connectivity in Large Sensor Networks,” Interna- tional Journal of Ad Hoc & Sensor Wireless Networks, Vol. 1, No. 1-2, 2005, pp. 89-124. [8] X. Wang, G. Xing, Y. Zhang, C. Lu, R. Pless and C. D. Gill, “Integrated Coverage and Connectivity Configura- tion in Wireless Sensor Networks,” Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, 2003, pp. 28-39. [9] T. T. Wu and K. F. Su, “Determining Active Sensor No- des for Complete Coverage without Location Informa- tion,” International Journal of Ad Hoc and Ubiquitous Computing, Vol. 1, No. 1-2, 2005, pp. 38-46. [10] S. Kumar, T. H. Lai and J. Balogh, “On K-Coverage in a Mostly Sleeping Sensor Network,” Proceedings of the 10th Annual International Conference on Mobile Com- puting and Networking, Philadelphia, 2004, pp. 144-158. [11] F. Ye, G. Zhong, S. Lu and L. Zhang, “PEAS: A Robust Energy Conserving Protocol for Long-Lived Sensor Net- works,” Proceedings of the 23rd International Confer- ence on Distributed Computing Systems, Providence, 2003, pp. 28-37. C opyright © 2010 SciRes. WSN  Y. C. MAO ET AL. Copyright © 2010 SciRes. WSN 776 [12] K. Wu, Y. Gao, F. Li and Y. Xiao, “Lightweight Deploy- ment-Aware Scheduling for Wireless Sensor Networks,” ACM/Kluwer Mobile Networks and Applications, Vol. 10, No. 6, 2004, pp. 837-852. [13] Y. C. Mao, G. F. Feng, L. J. Chen and D. X. Chen, “A Location-Independent Connected Coverage Protocol for Wireless Sensor Networks,” Journal of Software, Vol. 18, No. 7, 2007, pp. 1672-1684. [14] http://pcl.cs.ucla.edu/projects/glomosim/ [15] W. Heinzelman, “Application-Specific Protocol Archi- tecture for Wireless Sensor Networks,” Ph.D. Thesis, Ma- ssachusetts Institute of Technology, Boston, 2000. |