S. PANUGANTI ET AL. 3
The equality constraints given by the above equations
are satisfied by running the power flow program. The
active power generation (Pgi) (except the generator at the
slack bus) and generator terminal bus voltages (Vgi) are
the optimization variables and they are self-restricted by
the optimization algorithm.
4. Non-Dominated Sorting Genetic
Algorithm II (NSGA-II)
NSGA introduced by Srinivas and Deb [8], implements
the idea of a selection method based on classes of domi-
nance of all solutions. This algorithm identifies non-
dominated solutions in the population, at each generation,
to form non-dominated fronts, based on the concept of
non-dominance of Pareto. After this, the usual selection,
crossover, and mutation operators are performed.
However, there are some disadvantages in NSGA. It
has been generally criticized for its computational com-
plexity, lack of elitism and for choosing the optimal pa-
rameter value for sharing parameter σshare. A modified
version, NSGA-II was developed, which has a better
sorting algorithm, incorporates elitism and no sharing
parameter needs to be chosen a priori [9]. In this algo-
rithm, the population is initialized as random, and the
number of population is N. Once the population in ini-
tialized the population is sorted based on non-domina-
tion into each front. The first front being completely
non-dominant set in the current population and the sec-
ond front being dominated by the individuals in the first
front only and the front goes so on. Each Individual in
the each front are assigned rank values or based on front
in which they belong to. Then, crowding distance is cal-
culated for each individual. The crowding distance is a
measure of how close an individual is to its neighbours.
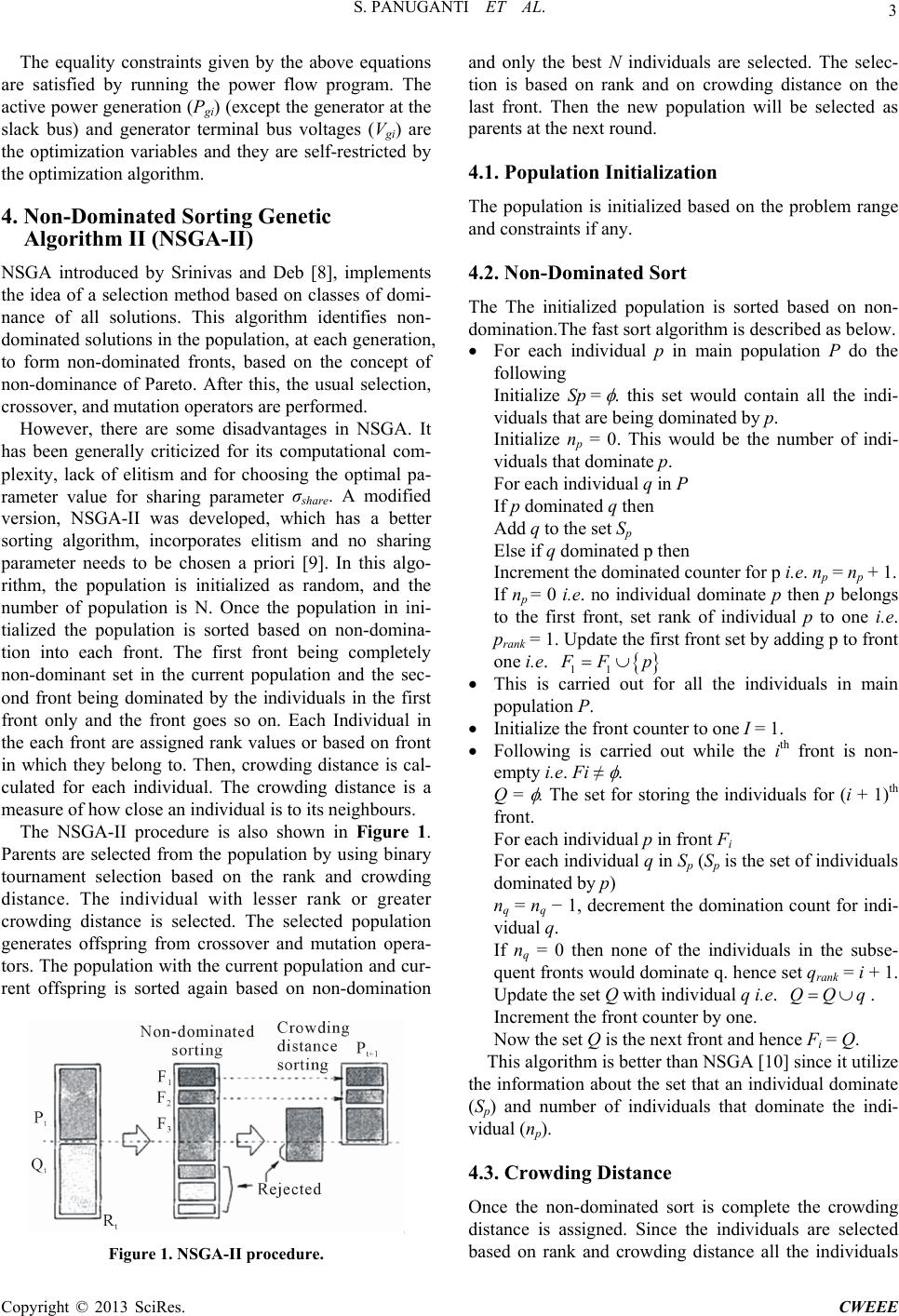
The NSGA-II procedure is also shown in Figure 1.
Parents are selected from the population by using binary
tournament selection based on the rank and crowding
distance. The individual with lesser rank or greater
crowding distance is selected. The selected population
generates offspring from crossover and mutation opera-
tors. The population with the current population and cur-
rent offspring is sorted again based on non-domination
Figure 1. NSGA-II procedure.
and only the best N individuals are selected. The selec-
tion is based on rank and on crowding distance on the
last front. Then the new population will be selected as
parents at the next round.
4.1. Population Initialization
The population is initialized based on the problem range
and constraints if any.
4.2. Non-Dominated Sort
The The initialized population is sorted based on non-
domination.The fast sort algorithm is described as below.
For each individual p in main population P do the
following
Initialize Sp =
. this set would contain all the indi-
viduals that are being dominated by p.
Initialize np = 0. This would be the number of indi-
viduals that dominate p.
For each individual q in P
If p dominated q then
Add q to the set Sp
Else if q dominated p then
Increment the dominated counter for p i.e. np = np + 1.
If np = 0 i.e. no individual dominate p then p belongs
to the first front, set rank of individual p to one i.e.
prank = 1. Update the first front set by adding p to front
one i.e.
11
FpF
This is carried out for all the individuals in main
population P.
Initialize the front counter to one I = 1.
Following is carried out while the ith front is non-
empty i.e. Fi ≠
.
Q =
. The set for storing the individuals for (i + 1)th
front.
For each individual p in front Fi
For each individual q in Sp (Sp is the set of individuals
dominated by p)
nq = nq − 1, decrement the domination count for indi-
vidual q.
If nq = 0 then none of the individuals in the subse-
quent fronts would dominate q. hence set qrank = i + 1.
Update the set Q with individual q i.e. .
QQq
Increment the front counter by one.
Now the set Q is the next front and hence Fi = Q.
This algorithm is better than NSGA [10] since it utilize
the information about the set that an individual dominate
(Sp) and number of individuals that dominate the indi-
vidual (np).
4.3. Crowding Distance
Once the non-dominated sort is complete the crowding
distance is assigned. Since the individuals are selected
based on rank and crowding distance all the individuals
Copyright © 2013 SciRes. CWEEE