Paper Menu >>
Journal Menu >>
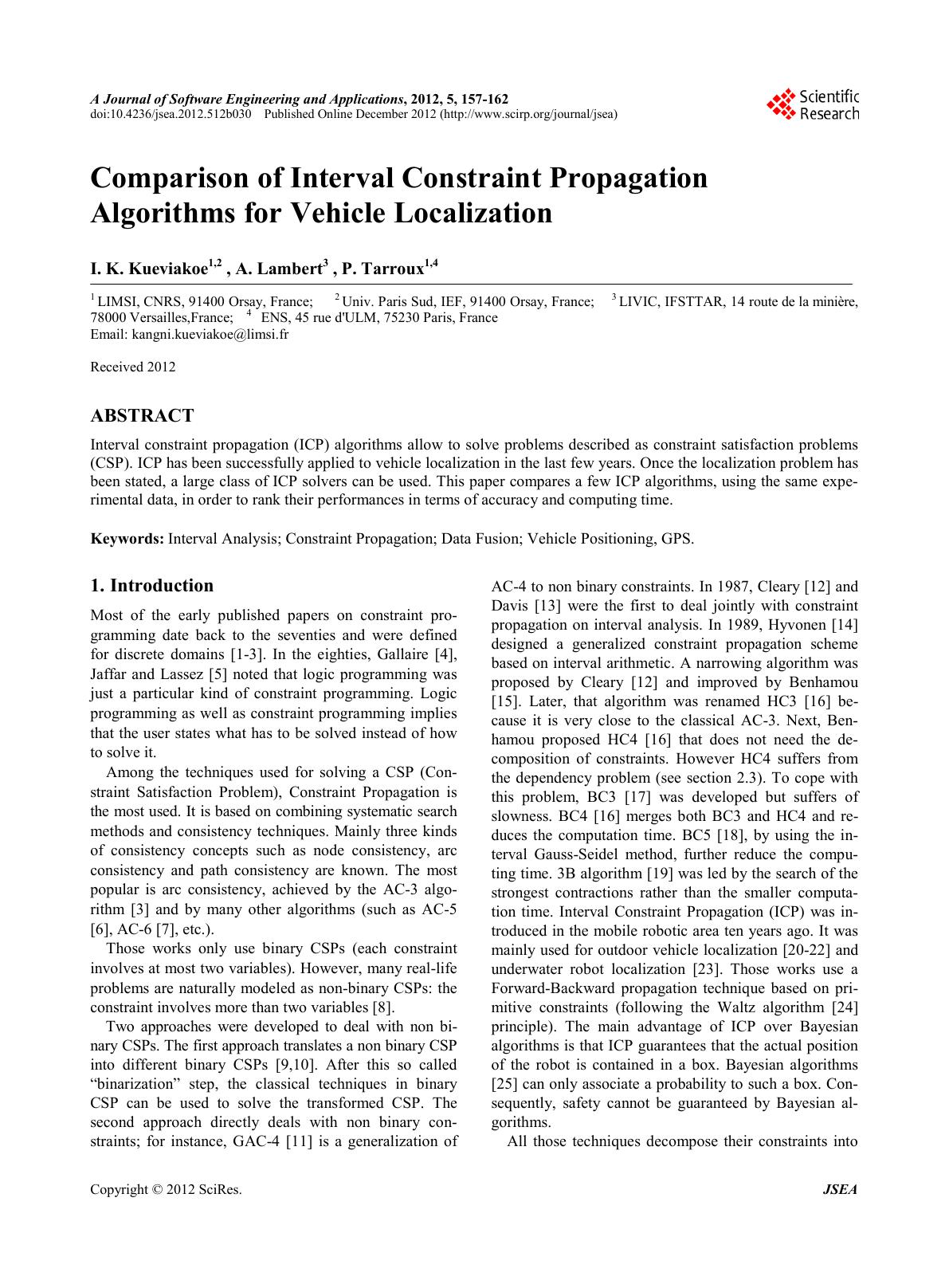 A Journal of Software Engineering and Applications, 2012, 5, 157-162 doi:10.4236/js ea .2012.512 b030 Published Online December 2012 (http://www.scirp.org/ journal/jsea) Copyright © 2012 SciRes. JSEA Comparison of Interval Constraint P ropagat ion Algorithms for Vehicle Localization I. K. Kueviako e1,2 , A. Lambert3 , P. Tarroux1,4 1 LIMSI, CNRS , 91400 Orsay, Fr ance; 2 Univ. Paris Sud, IEF, 91400 Orsay, France; 3 LIV IC , IF S TT AR, 1 4 ro ute de la minière, 78000 Versailles,France; 4 ENS, 45 rue d'ULM, 75230 Paris, France Email: kangni.kueviakoe@limsi.fr Received 2012 ABSTRACT Interval constraint propagation (ICP) algorithms allow to solve problems described as constraint satisfaction problems (CSP). ICP has been successfully applied to vehicle localization in the last few years. Once the localization problem has been stated, a large class of ICP solvers can be used. This paper compares a few ICP algorithms, using the same expe- rimental data, in order to rank their performances in terms of accuracy and computing time. Keywords: Inter va l Ana l ysi s ; Constr a int Propagation; Data Fusion; Vehicle Positio ning, GPS. 1. Introduction Most of the early published papers on constraint pro- gramming date back to the seventies and were defined for discrete domains [1-3]. In the eighties, Gallaire [4], Jaffar and Lassez [5] noted that logic programming was just a particular kind of constraint programming. Logic programming as well as constraint programming implies that the user states what has to be solved instead of how to solve it. Among the techniques used for solving a CSP (Con- straint Satisfaction Problem), Constraint Propagation is the most used. It is based on combining systematic searc h methods and consistency techniques. Mainly three kinds of consistency concepts such as node consistency, arc consistency and path consistency are known. The most popular is arc consistency, achieved by the AC-3 algo- rithm [3] and by many other algorithms (such as AC-5 [6], AC-6 [7], etc.). Those works only use binary CSPs (each constraint involves at most two variables). However, many real-life problems are naturally modeled as non-binary CSP s: the constraint involves more than two variables [8]. Two approaches were developed to deal with non bi- nary CSPs. The first approach translates a non bi nary CSP into different binary CSPs [9,10]. After this so called “binarization” step, the classical techniques in binary CSP can be used to solve the transformed CSP. The second approach directly deals with non binary con- straints; for instance, GAC-4 [11] is a generalization of AC-4 to non binary constraints. In 1987, Cleary [12] and Davis [13] were the first to deal jointly with constraint propagation on interval analysis. In 1989, Hyvonen [14] designed a generalized constraint propagation scheme based on interval arithmetic. A narrowing algorithm wa s proposed by Cleary [12] and improved by Benhamou [15]. Later, that algorithm was renamed HC3 [16] be- cause it is very close to the classical AC-3. Next, Ben- hamou proposed HC4 [16] that does not need the de- composition of constraints. However HC4 suffers from the dependency problem (see section 2.3). To cope with this problem, BC3 [17] was developed but suffers of slowness. BC4 [16] merges both BC3 and HC4 and re- duces the computation time. BC5 [18], by using the in- terval Gauss-Seidel method, further reduce the compu- ting time. 3B algorithm [19] was led by the search of the strongest contractions rather than the smaller computa- tion time. Interval Constraint Propagation (ICP) was in- troduced in the mobile robotic area ten years ago. It was mainly used for outdoor vehicle localization [20-22] and underwater robot localization [23]. Those works use a Forward-Backward propagation technique based on pri- mitive constraints (following the Waltz algorithm [24] principle). The main advantage of ICP over Bayesian algorithms is tha t ICP guarant ees that the actual po sition of the robot is contained in a box. Bayesian algorithms [25] can only associate a probability to such a box. Con- sequently, safety cannot be guaranteed by Bayesian al- gorithms. All those techniques decompose their constraints into  Comparison of Interval Constraint Propagation Algorithms for Vehicle Localization Copyright © 2012 SciRes. JSEA 158 primitive ones (binary constraints). Decomposing con- straints into primitive constraints implies creating many auxiliary variables that should be also narrowed and can interfere the narrowing of the primary variables. Some comparisons [18, 16, 26] have been realized between ICP algorith m applied to theor etical p rob lems taken fro m areas like chemistry, astrophysics, etc. For every prob- lem, one CSP is formalized and solved. The computation time and precision are then analyzed. We will extend this work to the vehicle localization problem where the CSP evolve with a sliding time window. Our goal is to com- pare the most achie ved ICP algorith ms found in t he stat e of the art, in order to show which one of those algorithms is the more s uitable for the vehicle loc alization (in terms of the processing time and the precision of the results). Section 2 introduces interval analysis. ICP (Interval Cons traint Prop agation) algorithms are discussed in Sec- tion 3. The localization process including models and sensors is presented in Section 4. Section 5 shows our experimental results before concluding in Section 6. 2. Basics of Interval analysis and Constraint Propagation 2.1. Overview of Interval analysis Interval analysis [27] was introduced in the sixties in order to solve the problem of approximations made dur- ing calculations. The key idea of interval analysis is to represent numbers by intervals which included the real values. An interval is repr esent ed usi ng [ ]. For example: [][, ]{|}()xxxxxx x== ∈≤≤∈I is the in- terval containing x. A set of rules have been defined to per form all the usua l op er ations o n int erval s. The vehicl e configuration is represented by several intervals. To es- timate and handle the sets implied in our problem, we use the concept of boxes as bounded configurations: a box 3 []( )∈xI is a Cartesian product of interval do- mai ns. 2.2. Inclusion Fun ct ion For any function f defined as combinations of arith- metical operators and elementary functions, interval analysis defines the inclusion function (also called inter- val ext ensio n) f[ ] as: [] ,([ ])([ ])xDfxf x∀∈ ⊂ (1) The easiest way to obtain the inclusion function is to replace all the variables by their intervals. For instance, 2 , ()24x Dfxxx∀∈=+ + (2) has t he following incl usion functi on: 2 [] ,([])[]2[] 4x Dfxxx∀∈= ++ (3) 2.3. The dependency problem Interval arithmetic handles multiple occurrences of a same variable as many different variables. For instance, another i nclusion function of E quation (2) is 2 [],2 ,([ ])([ ]2)x Dfxx∀∈= + (4) f[] has two occurrences of the variable [x] whereas f[],2 has onl y one . The i mages of the int erval I = [−3, 4] are f[] (I) = [−8, 36] and f[],2 (I) = [0, 36]. The interval image computed by f[],2 is sharper than the one produced by f[]. It is well known that the problem of finding the optimal interval image is complicated by the multiple occur- rences of a variable: it is the dependency problem [28]. 2.4. Constraint Satisfaction Problem Constraint satisfaction problems (CSP) are mathematical problems that are solved by finding states satisfying the constraints. A constraint restricts the possible solutions. A Constraint Satisfaction Problem is defined by: • a set of variables {x1, x2, .., xn}, • a set of domains {D1, D2, ..,Dn}, such as for each varia- ble xi , a domain Di with the possible values for that va- riable are given, • a set of constraints {C1, C2, .., Cm}, which are relations between the variables. Constraint propagation consists of iterating domain reductions, by using the set of m con- straints, until no do main can be contracted. Interval Con- straint Satisfaction Problem defines each domain as an inter val. The Cartesian product of the contracted interval domains is our solution box which is guaranteed to con- tain the real vehicle localization. Such contractions can be achieved by various algorithms that ar e described in the next section. 3. Constraint Propagation Algorithms 3.1. HC3 HC3 [12] enforces consistency over simple (primitive) constraints. Let’s consider the constraint z = cos(2x − y) with [x], [y], [z] the intervals to contract. This constraint is not a primitive one. It is called “user constraint” or “complex constraint”. A primitive constraint involves only one arithmetic operator or one of the usual functions like sin(), cos(), exp(), etc. The complex constr a int is first decomposed into primitive operations: 2 () ax b ay zcos b = × = − = (5) Then two phases are realized to contract the intervals: - For ward pro pagation allo ws to narro w the left terms (a, b and z) of Equation (4)  Comparison of Interval Constraint Propagation Algorithms for Vehicle Localization Copyright © 2012 SciRes. JSEA 159 [][] (2[]) [ ][ ]([][]) [][] ([]) aax bbay zzcos b = ∩× = ∩− = ∩ (6) - Backward propagation which reduces the right terms (x, a, y and b) of Equation (4) [] []([]/2) [ ][ ]([][]) [ ][]([][]) [] []([]) xx a a a by y yab bbarccos z = ∩ =∩+ =∩− = ∩ (7) A well known drawback of this method is that the de- composition into primitive constraints introduces new variables in the CSP. This hinders efficient domain tigh- tening. Previous works on vehicle localization use the same Forward/Backward propagation as HC3. 3.2. HC4 HC4 [16] does not decompose complex constraints into primitive ones. It follows a loop propagation and process constraints individually using HC4-revise function. HC4-revise reduced domains by removing inconsistent values across them and returns the new narrowed do- mains to HC4. HC4-revise uses a binary tree representa- tion of constraints, where leaves are constants or va- riables and nodes represent elementary operation sym- bols such as +, −, sin(), etc. HC4-revise works in two phases: • The first phase called “forward evaluation phase” goes through the grap h from the le aves to the root of the tree. It evaluates recursively the interval of sub-expression represented by a current node by using a natural exten- sion of the underlying functi ons. • The second phase is called “backward propagation phase”. It traverses the tree from the root to the leaves. It applies on each node a contraction operator (a projec- tion). The contraction operator narrows the interval of the current node by removing inconsistent values w.r.t the basis operator of its ascendant node. The main limitation of HC4 is its sensitivity to the mul- tiple occurrences of variables[17]. For instance, when considering a constraint like: 22xxy×+ = , with (,) [2,4][1,1]xy ∈−×− HC4 (and HC3) would not re- duce the initial box. But they would reduce perfectly the initial box when the constraint is stated like 22 2xy+= . 3.3. BC3 BC3 [17] tightens the domains with a search procedure based on bisection over natural interval extension of constraints. The following example shows the algorithm principle. Let y−x=0 be a constraint and ( ,)[0,1][0,8]xy∈× . The left bound of Iy is box consis- tent since. 0 ∈ 0 − 2 × Ix = [-2,0]. And on t he o the r ha nd , the ri ght bo und o f I y is not box consiste nt b ec ause 0 ∈ 8 − 2 × Ix = [6, 8]. The domain of y is divided to find the most c onsist ent value, in the way as follows: [0, 8] is divided into [0, 4] and [4, 8] [0, 4] − 2 × Ix = [-2, 4] [4, 8] − 2 × Ix = [2, 8] ⇒ [4, 8] is eliminated [0, 4] is divided into [0, 2] and [2, 4] because the bound 4 is not box consistent [0, 2] − 2 × Ix = [-2, 2] [2, 4] − 2 × Ix = [0, 4] [2, 4] is divided into [2, 3] and [3, 4] [2, 3] − 2 × Ix = [0, 3] [3, 4] − 2 × Ix = [1, 4] ⇒ [3, 4] is eliminated ... The final do main of y is Iy = [0, 2]. The same technique is applied to determine Ix = [0, 1]. This algorithm is more time consuming than HC3 and HC4 but it does not suffer from the dependency problem. 3.4. BC4 BC4 [16] combines BC3 and HC4. It fights the draw- backs of HC4 (multiple occurrences) and BC3 (slow- ness). It adapts its computation technique to the number of occurrences of each variable in a constraint. HC4 re- duces the domain of variables that occur only once in a constraint. Variables occurring more than once are nar- rowed by searching “extreme quasi-zeros” using BC3 combined with an interval Newton method described in [17]. 3.5. 3B 3B algorithm [19] also referred as strong consistency algorithm, computes the projection of sets of constraints over the variables. It combines constraints in order to impr ove the precision of domains narrowing. Instead of proj e ct ing c onstr ai nt one by one, it pro j ects the whole set of constraints of the CSP. For example, let’s consider two variables xk and yk such as (,)[ 2,2][ 2,2] kk xy ∈− ×− with the following con- straints: 0 0 kk kk xy xy += −= (8) The domains [−2, 2] are consistent solutions which can- not be further reduced if we take constraints one by one. However, we can notice that for x = −2 the first con- straint gives y = 2 and the second y = −2 which are not rigorously correct. 3B takes into account b ot h const rai nts and le ads the n to the solutio n [0, 0] which is mathe mati-  Comparison of Interval Constraint Propagation Algorithms for Vehicle Localization Copyright © 2012 SciRes. JSEA 160 cally correct. 3B uses a low level algorithm in order to contract the intervals; we have chosen to use BC4 which combines the advantages of BC3 and HC4. 4. Localization process 4.1. Sensors 4.1.1. Odometers Odometers are set on the two rear wheels of our vehicle. They give the distance traveled by each wheel indepen- dently. The accuracy of an odometer depends on its number of steps and its maximum error is known to be one step. Consequently the real value of the displacement of a non sliding wheel can be bounded by [δp]=[δpodo−1, δpodo+1 ] wi th δp odo the number of measured steps. When consi der ing sl idi ng, t he move ment of a sli ding wheel can be deduced from a non-sliding one by adding a sliding noise [εodo]. The displacement with a sliding wheel is defined by: [δp]=[δpodo−1−εodo , δpodo +1+εodo] (9) 4.1.2. Gyro A gyro is a he ading s enso r which measur es t he r otat iona l speed in an inertial reference system. It is are based on a technique that consi sts in vibratin g silicon struc tures that use the Coriolis force to output angular rate indepen- dently of acceleration. Our gyro measures the yaw rate from which we deduce the elementary rotation [δθ] . [δθ] = [δθgyro − εgyro, δθgyro + εgyro] (10) 4.1.3 Global Positioning System receiver The GPS satellites orbit at a height of 20.190 km and synchronize their transmissions so that their signals are sent at the same time. When a GPS receiver reads the transmission of three or more satellites, it calculates the arrival time differences and its relative distance to each satellite. Our GPS receiver performs the necessary cal- culation and returns latitude and longitude coordinates which are converted as a position [y] = ([x], [y])T in a Cartesian local frame. Furthermore, the GPS receiver computes the measurement imprecision εgps on-line and sends it into the GST NMEA fr ame. [ ] ,, ,, , , gpsx gpsgpsx gps gpsy gpsgpsy gps xx yy εε εε −+ = −+ y (11) 4.2. The bounded displacement model The initial imprecise configuration of the vehicle is represented by a box [x] = ([x][y][θ])T. (x, y) are the coordinates of the rear axle center and θ is the orientatio n of a local frame attached to the vehicle. The prediction step co nsists i n moving a box b etwee n the st eps k−1 and k: 11 11 1 [] [] []cos([]) 2 [] [] []sin([]) 2 [][ ] k k kk pred k kk kk kk xs x ys δθ δθ δθ δθ θ δθ −− −− − ++ =++ + (12) where [ ] are intervals including the real values. [δsk ] is obtained from the odo meters measurement: []([][] [][]) [] llr r k wpwp sP πδ δ δ + = (13) whe r e wr stands for the radius of the right wheel, wl is the radius of the left wheel and P represents the odo- meter's resolution. 4.3. The CSP We consider from time k-w+1 to time k (the cur rent ti me) all the state equations: the contractions are done in a windo w of le ngth w and the CSP is d efined by 3×w con- straints. The constraints at time k are given by: 11 11 1 [] [][] []cos([]) 2 [] [][] []sin([]) 2 [][][ ] k kkk k k kkk k kk k xx s yy s δθ δθ δθ δθ θ θδθ −− −− − =++ =++ = + (14) whe r e • [δsk], [δθk] are given by the odometers and gyro mea- sure ments thanks t o Equations (13) and (10). • [xk] and [ yk] are ini tialized with GPS meas ure ments (see Equation (11)). • [θk] is initialized to ]−π, π]. • [xk−1], [yk−1] and [θk−1] are o btained from the resolution of the previous CSP (at time k−1). 5. Results HC4, BC3, BC4 and 3B-BC4 ha ve been used in orde r to solve the CSP (14). We had used C source code from the RealPaver Solver [29] on a PC equipped with an Intel Core i7 CPU 960 @ 3.20GHz running under Ubuntu 12.04 LTS. The solving has been realized off-line, for each algorithm, with a set of real data that have been collected on the Satory test track (Fig. 1) with LIVIC’s prototype running at an average speed of 50km/h. A sol- id-state vertical gyro VG400CC provides the yaw rate data. T hanks to an Ag GPS13 2, the global loca lization is performed. GPS measurements and gyro/odometer data acquisitions are realized at a 5Hz frequency; time- 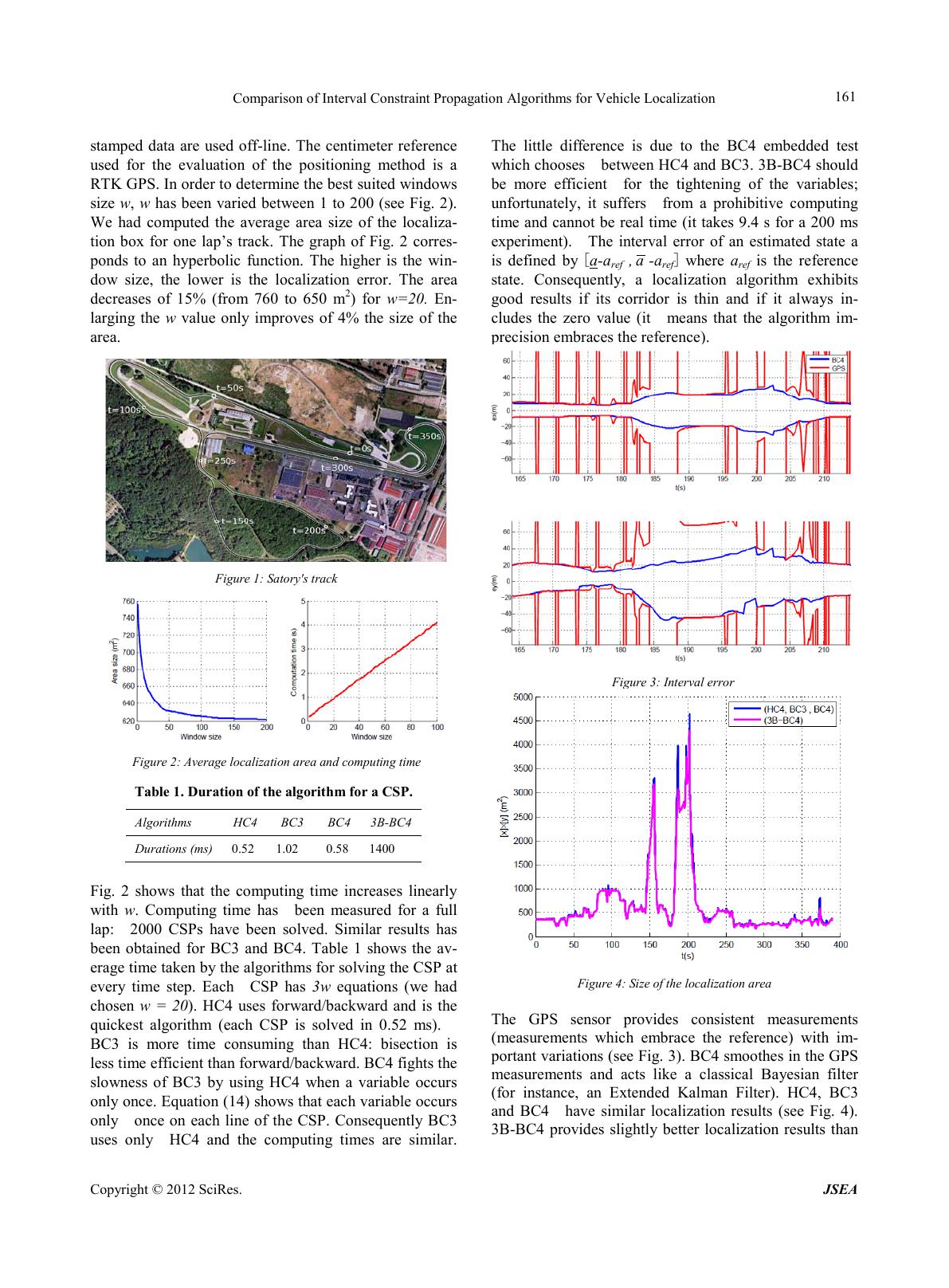 Comparison of Interval Constraint Propagation Algorithms for Vehicle Localization Copyright © 2012 SciRes. JSEA 161 stamped data are used off-line. The centimeter reference used for the evaluation of the positioning method is a RTK GPS. In order to determine the best suited windows size w, w has been varied between 1 to 200 (see Fig. 2). We had computed the average area size of the localiza- tion box for one lap’s track. The graph of Fig. 2 corres- ponds to an hyperbolic function. The higher is the win- dow size, the lower is the localization error. The area decreases of 15% (from 760 to 650 m2) for w=20. En- larging the w value only improves of 4% the size of the area. Figure 1 : Satory's track Table 1. Duration of the algor ithm for a CSP. Algorithms HC4 BC3 BC4 3B-BC4 Durations (ms) 0.52 1.02 0.58 1400 Fig. 2 shows that the computing time increases linearly with w. Computing time has been measured for a full lap: 2000 CSPs have been solved. Similar results has been obtained for BC3 and BC4. Table 1 shows the av- erage time taken by the algorithms for solving the CSP at every time step. Each CSP has 3w equations (we had chosen w = 20). HC4 uses forward/backward and is the quickest algorithm (each CSP is solved in 0.52 ms). BC3 is more time consuming than HC4: bisection is less time efficient than forward/backward. BC4 fights the slowness of BC3 by using HC4 when a variable occurs only once. Equation (14) shows that each variable occurs only once on each line of the CSP. Consequently BC3 uses only HC4 and the computing times are similar. The little difference is due to the BC4 embedded test which chooses between HC4 and BC3. 3B-BC4 s hould be more efficient for the tightening of the variables; unfortunately, it suffers from a prohibitive computing time and cannot be real time (it takes 9.4 s for a 200 ms experiment). The interval error of an estimated state a is defined by [a-aref , a -aref] where aref is the reference state. Consequently, a localization algorithm exhibits good results if its corridor is thin and if it always in- cludes the zero value (it means that the algorithm im- precision embraces the reference). The GPS sensor provides consistent measurements (measurements which embrace the reference) with im- portant variatio ns (see Fig. 3). BC4 smoothes in the GP S measurements and acts like a classical Bayesian filter (for instance, an Extended Kalman Filter). HC4, BC3 and BC4 have similar localization results (see Fig. 4). 3B-BC4 provides slightly better localization results than Figure 1: Satory's trac k Figu re 2: Average localizati o n area a nd c om puti ng time Figure 3: Interval error Figure 4: Size of the localization area 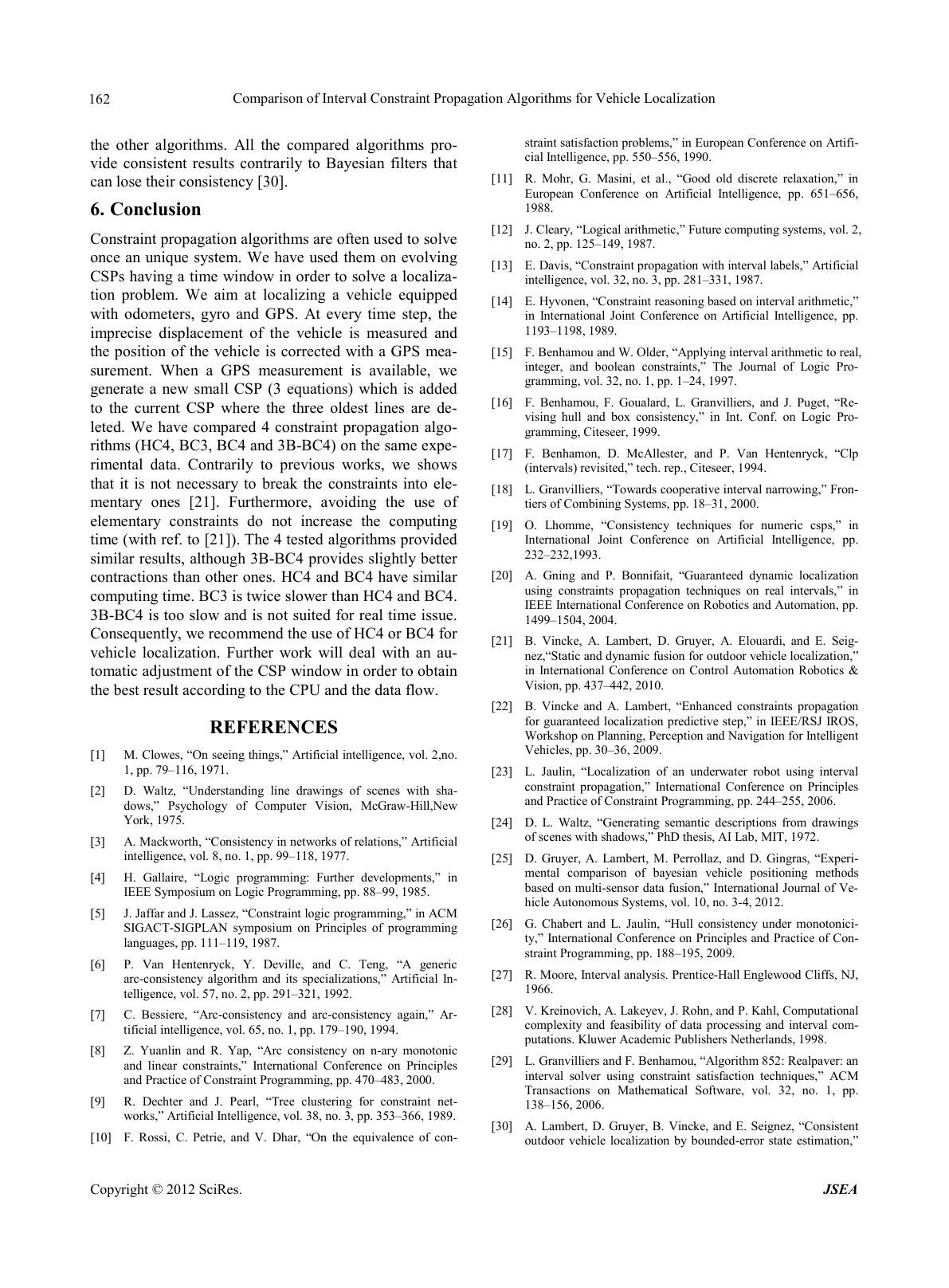 Comparison of Interval Constraint Propagation Algorithms for Vehicle Localization Copyright © 2012 SciRes. JSEA 162 the other algorithms. All the compared algorithms pro- vide consistent results contrarily to Bayesian filters that can lose their consistency [3 0]. 6. Conclusion Constraint propagation algorithms are often used to solve once an unique system. We have used them on evolving CSPs having a time window in order to solve a localiza- tion problem. We aim at localizing a vehicle equipped with odometers, gyro and GPS. At every time step, the imprecise displacement of the vehicle is measured and the position of the vehicle is corrected with a GPS mea- surement. When a GPS measurement is available, we generate a new small CSP (3 equations) which is added to the current CSP where the three oldest lines are de- leted. We have compared 4 constraint propagation algo- rithms (HC4, BC3, BC4 and 3B-BC4) on the same expe- rimental data. Contrarily to previous works, we shows that it is not necessary to break the constraints into ele- mentary ones [21]. Furthermore, avoiding the use of elementary constraints do not increase the computing time (with ref. to [ 21]). The 4 tested algorithms pro vided similar results, although 3B-BC4 provides slightly better contractions than other ones. HC4 and BC4 have si milar computing time . BC3 is twice slower than HC4 and BC4. 3B-BC4 is too slow and is not suited for real time issue. Consequently, we recommend the use of HC4 or BC4 for vehicle localization. Further work will deal with an au- tomatic adj ustment of the CSP window in order to obtain the best result according to the CPU and the data flow. REFERENCES [1] M . Clowes, “On seein g thin gs,” Arti ficia l intellig ence, vol. 2,n o. 1, pp. 79–116, 1971. [2] D. Waltz, “Understanding line drawings of scenes with sha- dows,” Psychology of Computer Vision, McGraw-Hill,New York, 1975. [3] A. Mackworth, “Consistency in networks of relations,” Artificial intelligence, vol. 8, no. 1, pp. 99–118, 1977. [4] H. Gallaire, “Logic programming: Further developments,” in IEEE Symposi um on Logic Programmin g, pp. 88–99, 1985. [5] J. Jaffar and J. Lassez, “Constraint logic programming,” in ACM S IGACT -SIGPLAN symposium on Principles of programming languages, pp. 111–119, 1987. [6] P. Van Hentenryck, Y. Deville, and C. Teng, “A generic arc-consistency algorithm and its specializations,” Artificial In- tell ige nce , vo l . 57, no. 2, p p. 2 91 –321, 1992. [7] C. Bessiere, “Arc-consistency and arc-consistency again,” Ar- tificial intelligence, vol. 65, no. 1, pp. 179–190, 1994. [8] Z. Yuanlin and R. Yap, “Arc consistency on n-ary monotonic and linear constraints,” International Conference on Principles and Practice of Constraint Programming, pp. 470–483, 2000. [9] R. Dechter and J. Pearl, “Tree clustering for constraint net- works,” Arti ficial Intelli gence, vol. 38, no. 3, pp. 353–366, 1989. [10] F. Rossi, C. Petrie, and V. Dhar, “On the equivalence of con- straint satisfaction problems,” in European Conference on Artifi- cial Intelligence, pp. 550–556, 1990. [11] R. Mohr, G. Masini, et al., “Good old discrete relaxation,” in European Conference on Artificial Intelligence, pp. 651–656, 1988. [12] J. Cleary, “Logical arithmetic,” Future computing systems, vol. 2, no. 2, p p . 1 25–149, 1987. [13] E. Davi s, “C on stra in t prop a gat ion with interv al la b els, ” Art i ficia l intelligence , vol . 32, no. 3, p p. 2 81–331, 1987. [14] E. Hyvonen, “Con stra int rea soni ng based on in terva l arith met ic, ” in International Joint Conference on Artificial Intelligence, pp. 1193–11 98, 1989. [15] F. Benhamou and W. Older, “Applying interval arithmetic to real, integer, and boolean constraints,” The Journal of Logic Pro- gramming, vol. 32, no. 1, pp. 1–24, 1997 . [16] F. Benhamou, F. Goualard, L. Granvilliers, and J. Puget, “Re- vising hull and box consistency,” in Int. Conf. on Logic Pro- gram ming , Citeseer, 1999. [17] F. Benhamon, D. McAllester, and P. Van Hentenryck, “Clp (intervals) revisited,” tech. rep., Ci teseer, 1994. [18] L. Granvilliers, “Towards cooperative interval narrowing,” Fron- tiers of Combining S yst ems , pp. 18–31, 2000. [19] O. Lhomme, “Consistency techniques for numeric csps,” in International Joint Conference on Artificial Intelligence, pp. 232–232,1 993. [20] A. Gning and P. Bonnifait, “Guaranteed dynamic localization using constraints propagation techniques on real intervals,” in IEEE International Conference on Robotics and Automation, pp. 1499–15 04, 2004. [21] B. Vincke, A. Lambert, D. Gruyer, A. Elouardi, and E. Seig- nez,“Static and dynamic fusion for outdoor vehicle localization,” in International Conference on Control Automation Robotics & Vision, pp. 437–442, 2010. [22] B. Vincke and A. Lambert, “Enhanced constraints propagation for guaranteed localization predictive step ,” in IEEE/RSJ IROS, Workshop on Planning, Perception and Navigation for Intelligent Vehicl e s, pp. 3 0–36, 2009. [23] L. Jaulin, “Localization of an underwater robot using interval constraint propagation,” International Conference on Principles and Practice of Constraint Programming, pp. 244–255, 2006. [24] D. L. Waltz, “Generating semantic descriptions from drawings of scenes with shadows,” PhD thesis, AI Lab, MIT, 1972. [25] D. Gruyer, A. Lambert, M. Perrollaz, and D. Gingras, “Experi- mental comparison of bayesian vehicle positioning methods based on multi-sensor data fusion,” International Journal of Ve- hicle Autonomous Syst ems , vol. 10 , no. 3-4, 2012. [26] G. Chabert and L. Jaulin, “Hull consistency under monotonici- ty,” International Conference on Principles and Practice of Con- strain t Programm ing, pp. 188–195, 2009. [27] R. Moore, Interval analysis. Prentice-Hall Engle wood C liffs , NJ, 1966. [28] V. Kreinovich, A. Lakeyev, J. Rohn, and P. Kahl, Computational complexity and feasibility of data processing and interval com- putations. Kluwer Academic Publishers Netherlands, 1998. [29] L. Gra nvilliers and F. B enhamou, “Algorithm 852 : Realpaver: an interval solver using constraint satisfaction techniques,” ACM Transactions on Mathematical Software, vol. 32, no. 1, pp. 138–156, 2006. [30] A. Lambert, D. Gruyer, B. Vincke, and E. Seignez, “Consistent outdoor vehicle localization by bounded-error state estimation,”  Comparison of Interval Constraint Propagation Algorithms for Vehicle Localization Copyright © 2012 SciRes. JSEA 163 in IEEE/RSJ International Conference on Intelligent Robots and Sy s tems , pp. 1 21 1 –1216 , 20 09. Be s t P aper Awar d F ina l is t. |