Circuits and Systems, 2013, 4, 6-10
http://dx.doi.org/10.4236/cs.2013.41002 Published Online January 2013 (http://www.scirp.org/journal/cs)
An Adaptive Howling Canceller Using 2-Tap Linear
Predictor
Akira Sogami, Yosuke Sugiura, Arata Kawamura*, Youji Iiguni
Department of Systems Innovation, Graduate School of Engineering Science, Osaka University, Toyonaka, Japan
Email: *kawamura@sys.es.osaka-u.ac.jp
Received October 1, 2012; revised November 1, 2012; accepted November 8, 2012
ABSTRACT
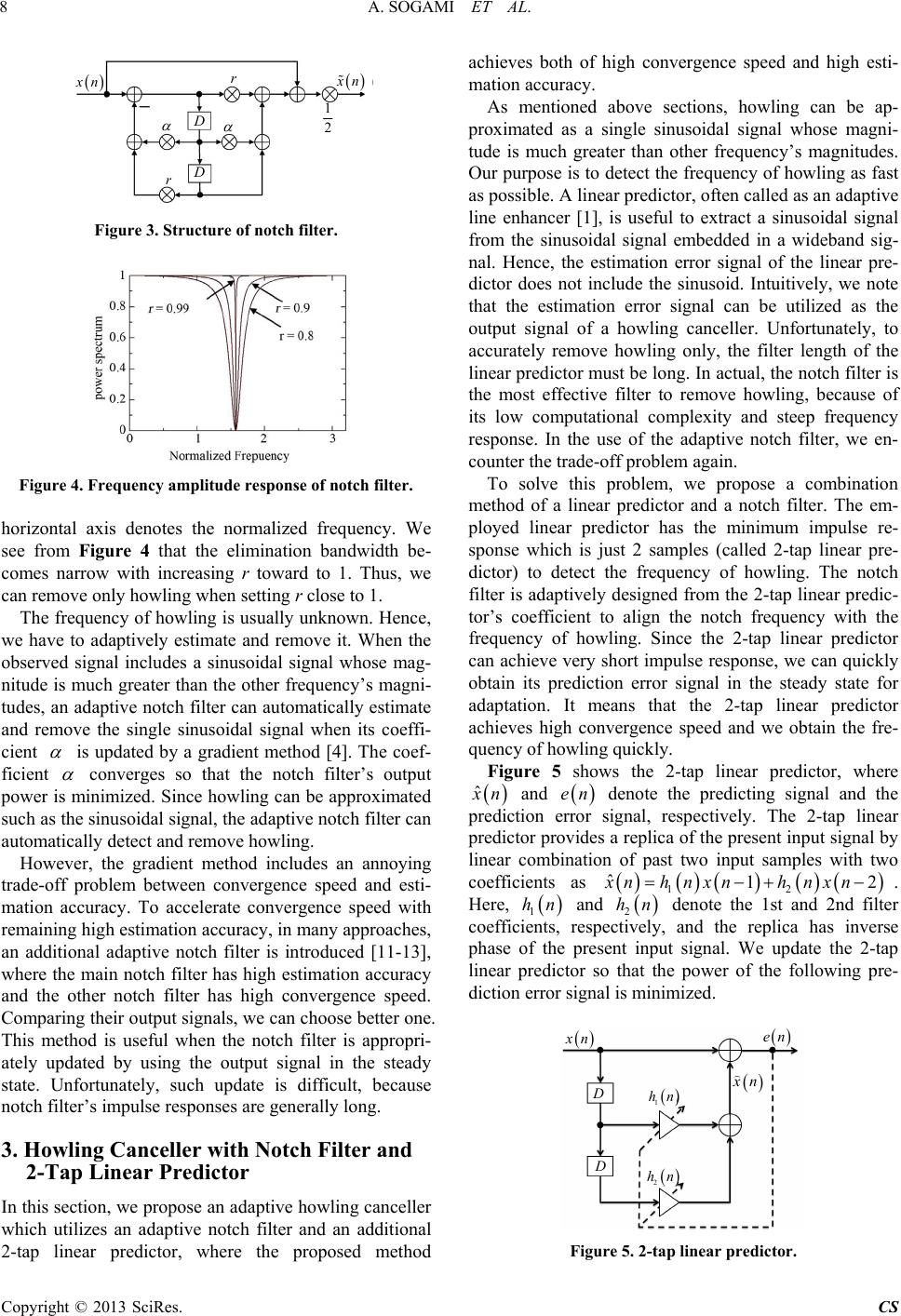
This paper proposes an adaptive howling canceller using notch filter and 2-tap linear predictor, where howling consists
of a single sinusoidal signal whose magnitude is much greater than other frequency’s magnitudes. The employed 2-tap
linear predictor can quickly detect howling due to its high convergence speed. Although the output signal of the 2-tap
linear predictor cannot be directly used as one of a howling canceller, we can obtain the frequency of howling from the
filter coefficient. We utilize the filter coefficient of the 2-tap linear predictor to design a notch filter which achieves a
very narrow elimination band. The designed notch filter removes only howling and retains other desired signals. Simu-
lation results show that the proposed adaptive howling canceller can quickly detect and effectively remove howling.
Keywords: Howling Canceller; Linear Predictor; Notch Filter; Single Sinusoidal Signal; Convergence Speed
1. Introduction
Howling is an annoying and persistence problem which
is mainly caused in public address system. The public
address system amplifies a signal observed at a micro-
phone and transmits the amplified signal with a loud-
speaker. Then, there exists a feedback path from the
loudspeaker to the microphone. This feedback path forms
an acoustical closed loop. When a frequency amplitude
response of the closed loop is greater than 1 and its phase
response is 2π, howling is caused, i.e., a single sinusoidal
signal rapidly becomes large. In this case, audience can-
not avoid perception of this unpleasant sound, and also it
is difficult to receive a desired signal. Moreover, the
public address system often breaks down due to howling.
To avoid this undesired phenomenon, many approaches
have been studied. One of the most famous and effective
methods is an echo canceller [1]. The echo canceller
adaptively estimates the acoustical impulse response
from the loudspeaker to the microphone, and provides a
replica of the feedback signal. When the echo canceller
perfectly estimates the feedback impulse response, sub-
tracting the replica of the feedback signal from the ob-
served signal gives perfect suppression of the feedback
signal and thus howling is not caused. Since the acousti-
cal impulse response is time-variant, the echo canceller is
required to achieve both of high estimation accuracy and
high convergence speed. Unfortunately, a tread-off exists
between the convergence speed and the estimation accu-
racy. Actually, in many practical environments, the echo
canceller cannot work well and hence it often causes
degradation of sound quality, echo, or howling. Sogami
et al. have proposed a simple howling canceller [2-3]
which estimates howling by utilizing only the distance
information between the loudspeaker and the microphone.
This method can estimate the frequency of howling faster
than the conventional echo canceller, under the assump-
tion that howling is depending only on the direct distance
from the loudspeaker to the microphone. Although howl-
ing often depends on the direct distance, the above as-
sumption cannot hold for howling which depends on the
distance including reflections. Actually, all the distances
including reflections cannot be calculated. These con-
ventional researches imply that the occurrence of howl-
ing may not be avoided and thus we have to prepare an-
other howling canceller which adaptively removes howl-
ing as fast as possible after it is caused.
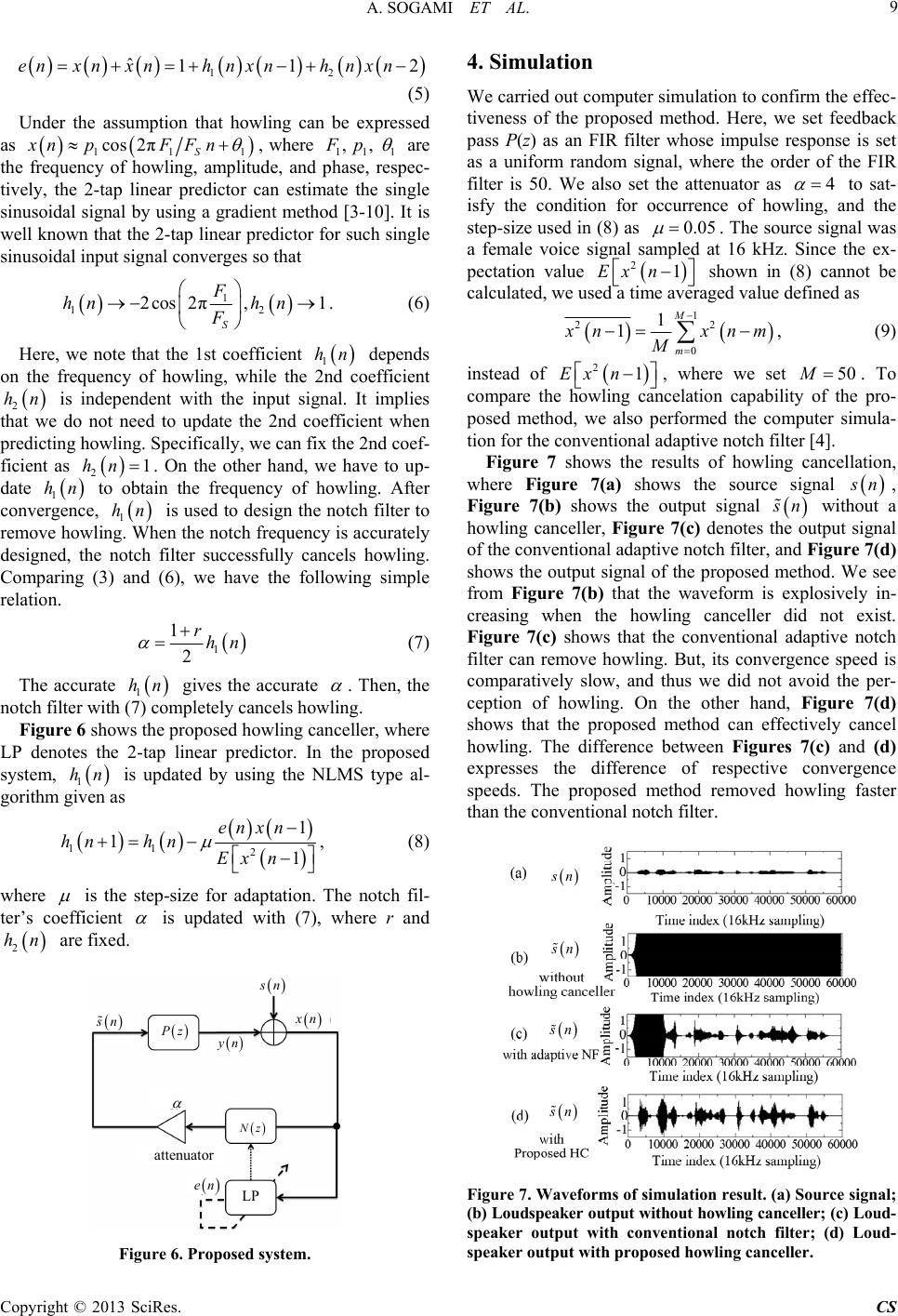
To remove howling after its occurrence, adaptive
notch filter techniques are useful [4-10]. They achieve
very narrow elimination bandwidth, and automatically
estimate and remove a single sinusoidal signal like howl-
ing. Unfortunately, it also has a trade-off problem be-
tween the convergence speed and the estimation accuracy.
Efficient notch filters which can solve the trade-off
problem have been proposed [11-13]. Their main idea is
to employ two or more notch filters, where one notch
filter achieves high estimation accuracy at an expense of
convergence speed, and the other notch filter has high
convergence speed with low estimation accuracy. In such
*Corresponding author.
C
opyright © 2013 SciRes. CS