Paper Menu >>
Journal Menu >>
 Journal of Software Engineering and Applications, 20 12, 5, 23-25 doi:10.4236/jsea.2012.512b005 Published Online December 2012 (http://www.SciRP.org/journal/jsea) Copyright © 2012 SciRes. JSEA 23 Impulsive Control for Synchronization of Lo renz Chaotic System Wenxiang Zhang, Zhanji Gui, Kaihua Wang* Scho ol of Mathematics and S tatistics, Hainan N ormal University, Haiko u, Hainan, Ch in a. Email: *kaihuawang@qq.com Received 2012 ABSTRACT Chaotic synchronization is the key technology of secure communication. In this paper, an impulsive control method for chaotic synchronization of two coupled Lorenz chaotic system was proposed. The global asymptotic synchroniza- tion of two Lorenz systems was realized by using the linear error feedback of the state variables of the drive system and the response system as i mpulsive contro l signal. B ased on s tabilit y theory of i mpulsive di fferential eq uation, conditions were obtained to guarantee the global asymptotic synchronization of two Lorenz systems. The theory analysis and computer simula tion result s validated its effectiveness. Keywords: Lorenz System; Impulsi ve Co ntrol; Synchro nization 1. Introduction As the ke y technology of secure communication, chaotic synchronization has been widely development since Pe- cora and Carroll [1] proposed the principle of chaos syn- chronization and realized it in the circuit in 1990. Several synchronization me tho d s ha ve b ee n pro p o se d so far , s uch as drive-response synchronization, coupling synchronizatio n, feedback-perturb sync hr oniz atio n, self-adapt synchroniza- tion, impulse synchronization, and so on [2-4]. Impulse synchroniz ati on has been widel y appreciated b y researcher and made some good progress [5-8]. However, many of the impulsive control methods for synchronization are subject to c ertain restrictio ns. Pap er [9] studied impulsi ve synchronization for Rössler chaotic system, and paper [10] researched impulsive control for synchronization of a class of chaotic system. In their papers the drive signal is generated by the impulsive signal and continuous signal of the system variables, so the controller is very compli- cated. In this paper, we use an impulsive control method, and design the controller for Lorenz chaotic system. De- signed controller is simple and easy to be realized. 2. Problem Formulation In this section, we study the impulsive control of Lorenz chaotic system [11] described by the following differential equation: 1 12 21 2 13 33 12 x xx xx xxx xx xx σσ ρ β =−+ = −− =−+ (1) where σ , ρ , β are system’s positive real number parameters. We choose the parameters 10 σ = , 28 ρ = , 83 β = , the initial condition is give n by 123 ( (0),(0),(0))(0,0,1) TT xxx = . The uncontrolled tra- jectories are shown in Figure 1, which is the notable Lorenz attractor. System (1) can b e r ewritten in to the following form: ( ) xAxg x= + (2) where 123 (, , ) T x xxx= is state variab le , 13 12 00 10 ,(). 00 Ag xxx xx σσ ρ β − =−=− − Figure 1. Lorenz attractor. *Corresponding author.  Impulsive Control for Synchronization of Lorenz Chaotic System Copyright © 2012 SciRes. JSEA 24 Regarding (2) as a drive system, the response system can be described as: () yAyg y= + (3) where 123 (,, ) T y yyy= is state variable of response system. Using linear feedback of synchronization error a s impulsive signal, we can obtain the following impulsive response s y s te m: 00 (),1, 2, () () k kk yAyg yttk yByxt t yt y + =+ ≠= ∆= −= = (4) where 33 (1, 2,) k BRk × ∈= are constant matrices describing the li near na ture o f t he d rivi ng i mpul ses, () kk y ytt +− ∆− , ( )() kk yt yt − . From system (2) and system (4), the error dynamics is given as followi ng: 00 (,)(),1, 2, () k kk e AeMxygettk eBe tt et e + =+ ≠= ∆= = = (5) here 1 12233 (,,) T ey xyxyxyx=−=−−− is synchroni- zation error, 31 21 000 (, )0 0 Mxy yx yx =−− 3. Synchronization of Lorenz Chaotic System Theorem: Denote k β , A λ and M λ be the largest eigenvalue of ()() T kk IB IB ++ (1, 2,)k= , T AA +, (,) (,) T M yxMyx+ respectively, if there exists a constant 1 α > such that ln() ()0 kA Mk αβλλ τ ++ ≤ , 1, 2,k= , then sy stem (4) and (2) are global Asymptotic synchro- nization. Here 1 k kk tt τ − = − is pulse interva l. Proof: Choose the Lyapunov function () T Ve ee= , then for 1 (,],(1,2,) kk ttt k − ∈= we have ()[(, )][(, )] [][ (,)(,)] ()()() TT TT T TTT T AM AM VeeeeeAeM yxeeeAeMyxe eAAeeMyxMyx e ee Ve λλ λλ =+=++ + =++ + ≤+ =+ So 11 ( ())( ())exp[() ()] kAM k VetVett t λλ + −− ≤+ ⋅− (6) On the other hand, when ,(1,2,) k tt k==, we get ( ())[() ()] () () ()( )()() ( ()) T kkk kk TT k kkk kk VetIB etIB et etIB IBet Vet β + =++ = ++ ≤ (7) According to the inequality (6) and (7), we can get 0 120 01 1 22 1 0 ( ())( ())exp[()()] (()){exp[()]} {exp[()]} {exp[()()]} (())exp[()()]/ k AM AM AM kAM k k kAM k VetVett t Vet tt Vett t βββλλ βλ λτ βλ λτ β λλ β λλα − ≤ +− = + + +− ≤ +− (8) Considering 0 ( ())Vetand 1 exp[()( )] 2 AM k tt λλ +− are both bounded, so lim( )0 t Ve →∞ = . Then the tr ivial solu- tion o f s yste m (5) is global a symptotic al ly stab le. T hat is, system (4) and (2) are global asymptotic synchronization. Now, according matrix theor y, we have ||( ,)( ,)|| T M M yxMyx λ ≤+ , where ⋅ denotes any kinds of norms of a matrix. We can obtain the follow- ing corollary: Corollary: if there exists a constant 1 α > such that ln()(||( ,)( ,)||)0, 1, 2, T kA k M yxMyx k αβ λτ ++ +≤ = (9) then system (4) and (2) are global asymptotic synchroni- zation. 4. Numerical Simulation In this section, we present some numerica l simulation s to demonstrate our results. We choose the parameters of Lorenz system (1) as 10 σ = , 28 ρ = , 83 β = , then we can calculate that 28.05 A λ = . By ob serving the Lo- renz attractor (Figure 1), we can get state variable’s val- ue ranges: 1 20 20x−≤≤ , 2 0 50x≤≤ , 3 20 20x−≤≤ , and work out 140 M λ ≤ . Take the equal impulsive in- tervals and the equal impulsive feedback gain matrix, that is, set k ττ =, (,,) k BBdiag µµµ = = , 1, 2,k= , then 2 ( 1) k βµ = + . According to the corollary in the previous section, if 2 0[lnln(1) ]/168.05 τ αµ < ≤−++ , then system (4) and (2) are global asymptotically synchro- nization. Let 0.5 µ = − , 1.1 α = , then 0 0.0077 τ <≤ . Figure 2 shows the simulation results in which initial Figure 2. Synchronization error of Lorenz chaotic system. 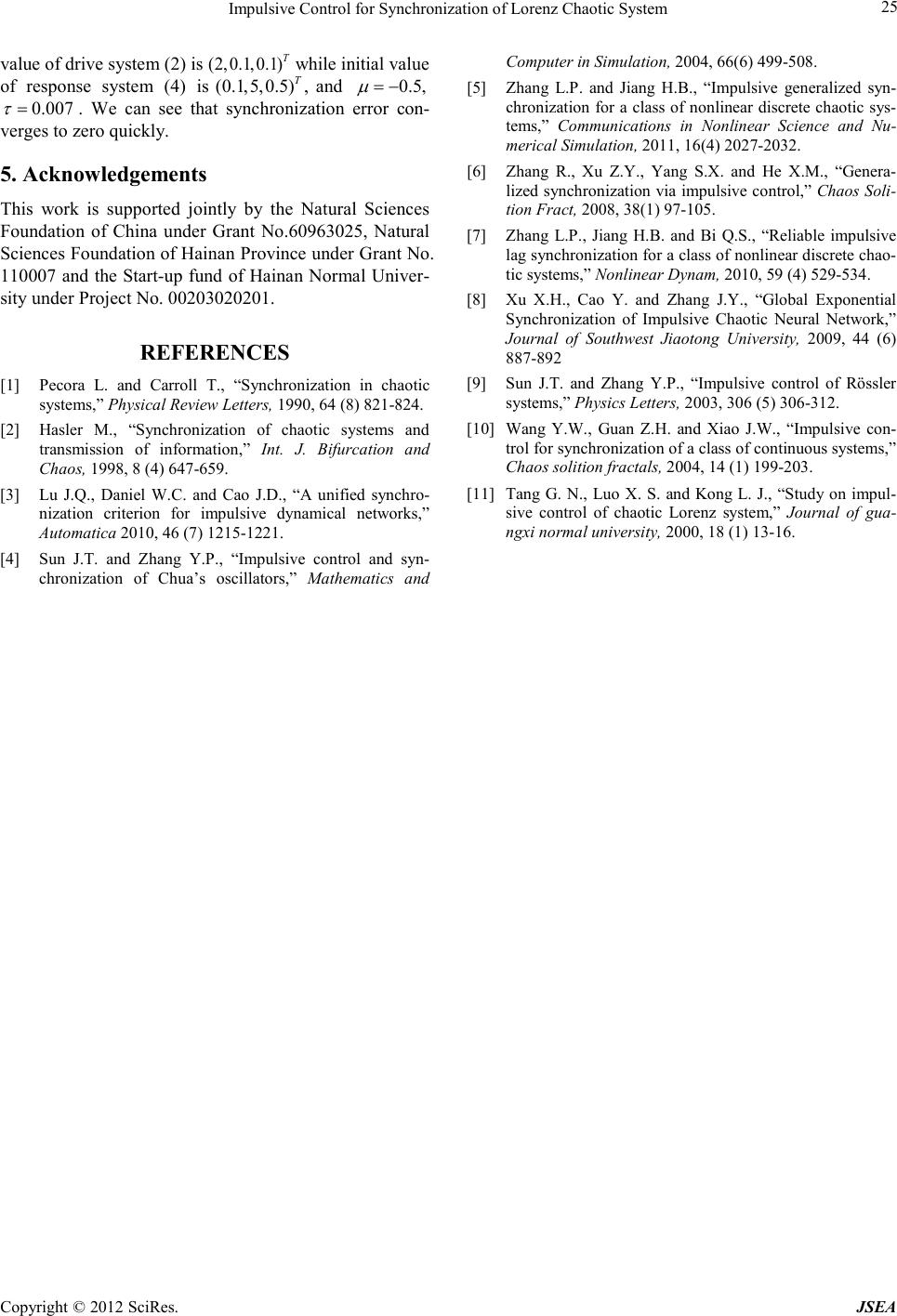 Impulsive Control for Synchronization of Lorenz Chaotic System Copyright © 2012 SciRes. JSEA 25 value of drive sys tem (2) is ( 2,0.1,0.1) T while initial valu e of response system (4) is (0.1,5,0.5), T and 0.5, µ = − 0.007 τ = . We can see that synchronization error con- verges to zero quickly. 5. Acknowledgements This work is supported jointly by the Natural Sciences Foundation of China under Grant No.60963025, Natural Scienc es Fo undat ion of Ha ina n Pro vince und er Gr ant No. 110007 and the Start-up fund of Haina n Normal Univer- sity under Project No. 00203020201. REFERENCES [1] Pecora L. and Carroll T., “Synchronization in chaotic systems,” Physi cal Review Letters, 199 0, 64 (8) 821-824. [2] Hasler M., “Synchronization of chaotic systems and transmission of information,” Int. J. Bifurcation and Chaos, 1998, 8 (4) 647-659. [3] Lu J.Q., Daniel W.C. and Cao J.D., “A unified synchro- nization criterion for impulsive dynamical networks,” Automatica 2010, 46 (7) 1215-1221. [4] Sun J.T. and Zhang Y.P., “Impulsive control and syn- chronization of Chua’s oscillators,” Mathematics and Compute r in Si m ulati on, 2004, 66 ( 6) 499-508. [5] Zhang L.P. and Jiang H.B., “Impulsive generalized syn- chronization for a class of nonlinear discrete chaotic sys- tems,” Communications in Nonlinear Science and Nu- merical Simulation, 2011, 16(4) 2027-2032. [6] Zhang R., Xu Z.Y., Yang S.X. and He X.M., “Genera- lized synchronization via impulsive control,” Chaos Soli- tion Fract, 2008, 38(1) 97-105. [7] Zhang L.P., Jiang H.B. and Bi Q.S., “Reliable impulsive lag synchronization for a class of n onlin ear discrete ch ao- tic systems,” Nonlinear Dynam, 2010, 59 (4) 529-534. [8] Xu X.H., Cao Y. and Zhang J.Y., “Global Exponential Synchronization of Impulsive Chaotic Neural Network,” Journal of Southwest Jiaotong University, 2009, 44 (6) 887-892 [9] Sun J.T. and Zhang Y.P., “Impulsive control of Rössler systems,” Physi cs Letters, 2003, 306 (5) 306-312. [10] Wang Y.W., Guan Z.H. and Xiao J.W., “Impulsive con- trol for synchronization of a class of continuous systems,” Chaos solition fractals, 2004, 14 (1) 199-203. [11] Tang G. N., Luo X. S. and Kong L. J., “Study on impul- sive control of chaotic Lorenz system,” Journal of gua- ngxi norm al univ e r s it y , 2000, 18 (1 ) 13-16. |