J. Biomedical Science and Engineering, 2010, 3, 927-930
doi:10.4236/jbise.2010.39123 Published Online September 2010 (http://www.SciRP.org/journal/jbise/ JBiSE
).
Published Online September 2010 in SciRes. http:// www.scirp.org/journal/jbise
Design and research of measuring system of clamping force of
hemostats
Huifang Wang, Shuyi Wang, Ying Zhou, Jie Tan
School of Medical Instrument and Food Engineering, University of Shanghai for Science and Technology, Shanghai, China.
Email: fengerimissyou@163.com
Received 15 July 2010; revised 25 July 2010; accepted 28 July 2010.
ABSTRACT
Reliability of medical instruments such as hemostats
is extremely important because these instruments are
used in patients who are in critical condition. Clam-
ping force of hemostats, as an important parameter
of hemostats, should be detected. However, it could
not be tested directly. In order to test it, a testing sys-
tem has been put forward. The system is comprised
of sensor, acquisition card, and three-way tap and so
on. This system is controlled by a computer. The tes-
ting system has been proved to be effective in testing
the clamping force of hemostats.
Keywords: Hemostat; Clamping Force; Measuring Sys-
tem
1. INTRODUCTION
A hemostat is a vital surgical tool used in almost any su-
rgical procedure, usually to control bleeding. Hemostats
belong to a group of instruments that pivots (similar to
scissors, includes needle holders, tissue holders and var-
ious clamps), and where the structure of the tip determ-
ines their function. Hemostats have handles that can be
held in place by the locking mechanism. The locking
mechanism is typically a series of interlocking teeth, a
few on each handle that allow the user to adjust the cla-
mping tension of the pliers [1]. However, pressure val-
ues are different regarding to different hemostats.
Medical equipment manufacturers can produce many
kinds of hemostats, but inspection standard and inspec-
tion method of hemostats remain be not researched and
improved, especially clamping force of hemostats rem-
ains cannot be tested directly or indirectly. However,
clinicians or inspection personn el both hope to know the
quantitative pressure.
In both at home and abroad, clamp pressure measure-
ement has been fixed in the field of auto and robots. In
brake-by-wire systems of auto, central controllers requ-
ire accurate information about the clamp force between
the brake pad and the disc as a function of pad displ-
acement, which is usually denoted as the characteristic
curve of the caliper. Due to aging, temperature, and oth-
er environmental variations, caliper characteristic curves
vary with time. Therefore, automatic caliper calibration
in real-time is vital for high-performance braking action
and vehicle safety [2]. In robots, firstly design machine
gripper according to the features of the object of holding.
Secondly analyzes forces of all parts of machine gripper.
At last, derivate clamp pressure force according to the
principle of torque. In these machine grippers some are
two-finger translation grippers [3] and some are curved
arm type hydraulic grab with four bar linkage [4]. There
are hardly some studies in clamp pressure measurement
of hemostats.
Existing pressure sensors in shape and size and fatigue
resistance level are unable to satisfy the special needs of
these medicinal hemostats, so direct measurement of cla-
mping force of hemostats needs design special sensor
system. However the sensor system has not been worked
out so far according to my study. So some attentions
have been focused on finding an indirect measurement
method.
An indirect measurement method is proposed in this
paper. Through testing pressure changes of a clamping
catheter filled with liquid, clamping force of hemostats
can be reflected indirectly.
2. METHODS AND APPARATUS
2.1. Description of Apparatus
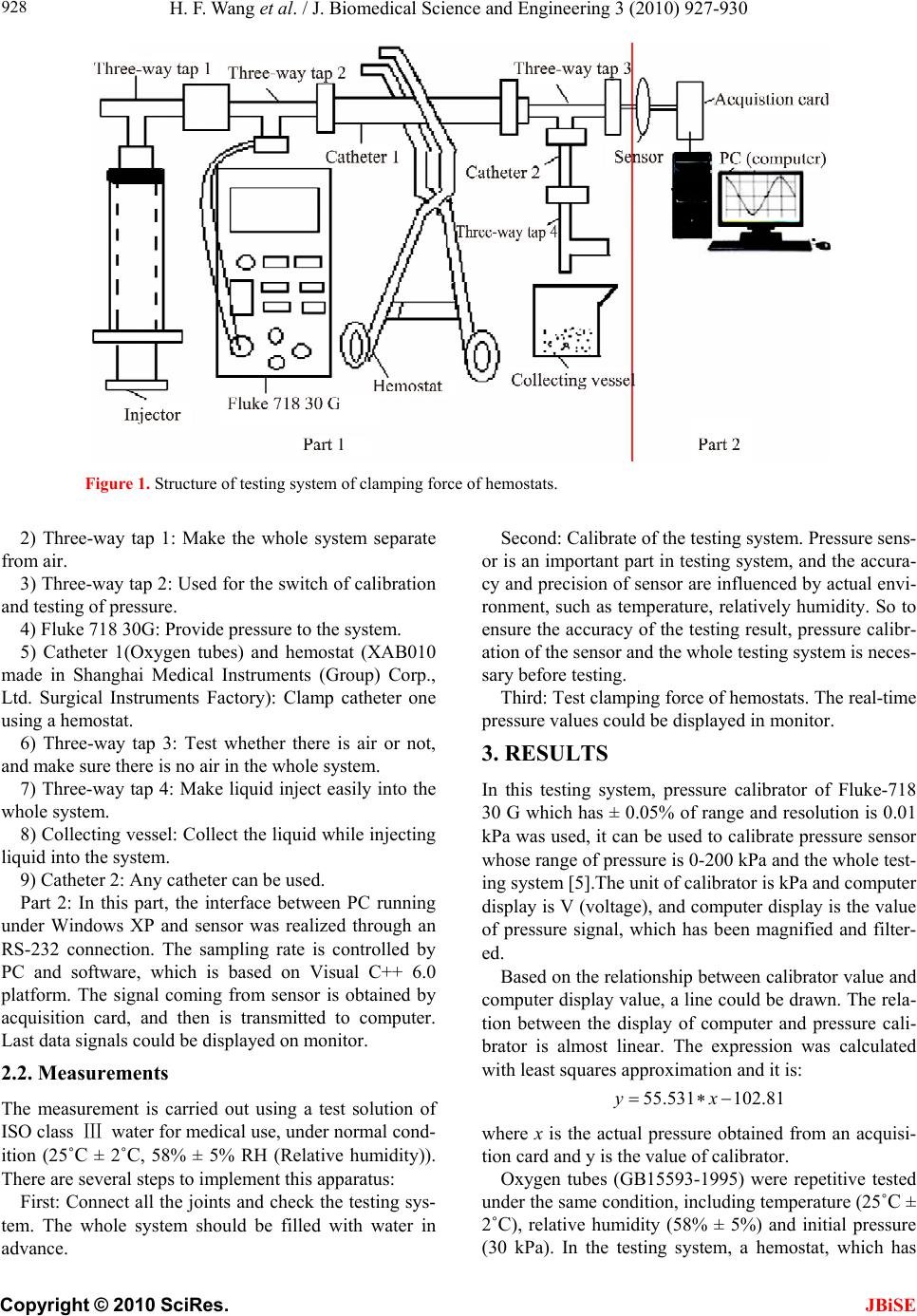
Measuring system of clamping force of hemostats is
designed which is shown in Figure 1.
The testing system can be divided into two parts acco -
rding to their different functions.
Part 1: In this part, hardware principle of the test syst-
em is provided. Functions of each component as follows:
1) Injector: Eliminate air and fill liquid in the whole
system.